Гаспер Б.С., Липатов И.Н. ИВС и АСУТП. Учебное пособие
Подождите немного. Документ загружается.

51
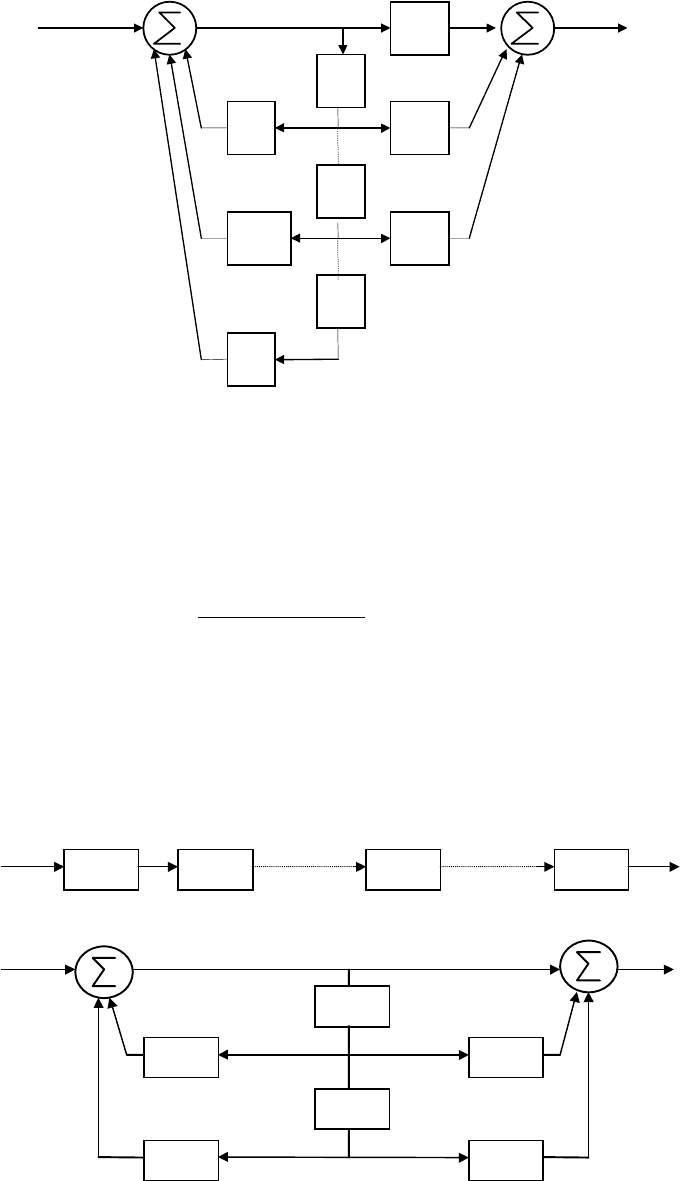
Схема канонической формы реализации приведена на рис. 3.15.
Рис.3.15
Рассмотрим каскадную и параллельную канонические формы реализации.
Передаточная функция P-фильтра – дробно-рациональная функция, представляе-
мая либо в виде произведения, либо в виде суммы дробно-рациональных функций
в общем случае второго порядка. Для реализации P-фильтра в каскадной канони-
ческой форме передаточную функцию изображают
произведением:
Wz A
zz
zz
AHz
ii
ii
i
i
l
i
l
() ()=
++
++
=
−−
−−
==
∏∏
1
1
1
1
2
2
1
1
2
2
11
αα
ββ
, (3.45)
где A - коэффициент, в общем случае не равный нулю.
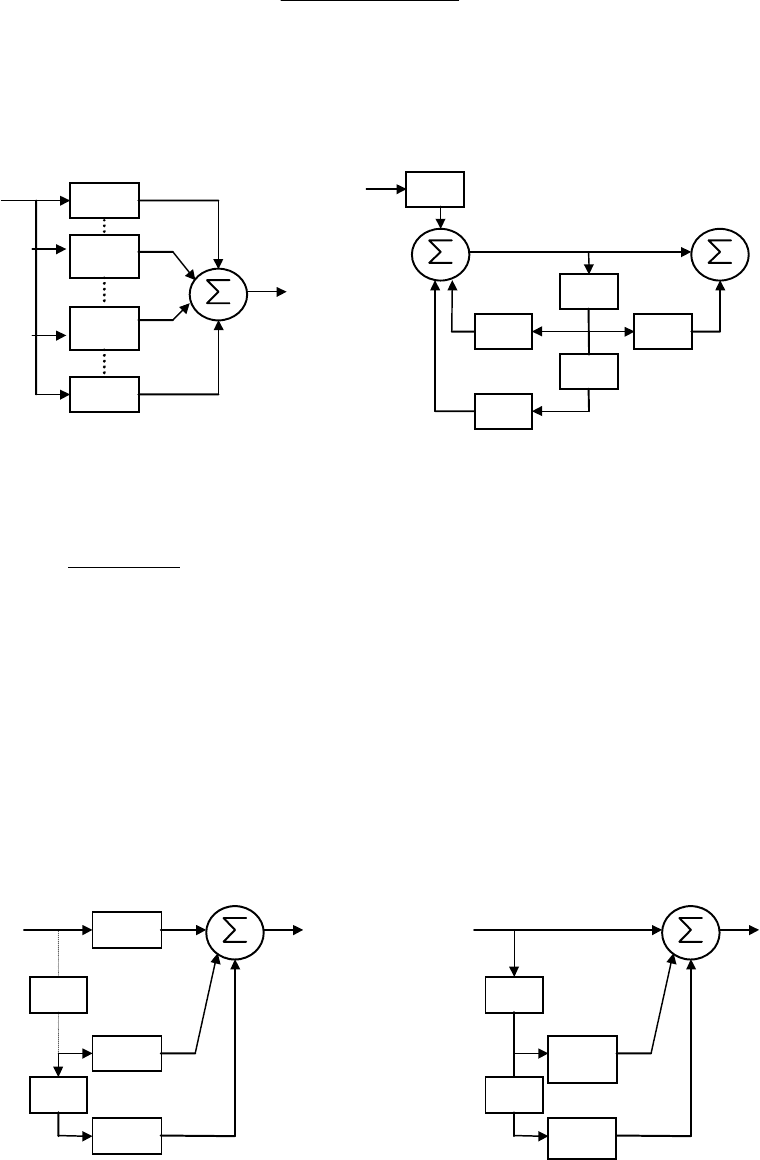
Схема фильтра для этого случая представлена на рис.3.16,а. Каждая пере-
даточная функция H
i
(z) реализуется биквадратным блоком (рис.3.16,б), числитель
и знаменатель передаточной функции которого являются квадратными многочле-
нами.
Рис. 3.16
Параллельную каноническую реализацию можно получить, если переда-
точную функцию P-фильтра разложить на элементарные дроби:
a
0
a
1
a
N-1
-b
1
-b
N-1
z
-1
z
-1
z
-1
u
m
y
m
-b
k
A
H
1
(z)
H
i
(z)
H
l
(z)
a)
u
m
y
m
б)
-
β
1
-
β
2
z
-1
α
1
α
2
z
-1
Вх Вых
52
.)(
1
1
)(
11
2
2
1
1
1
∑∑
==
−−
−
+=
++
+
+=
l
i
l
i
i
ii
i
i
zHA
zz
z
BAzW
ββ
α
(3.46)
Структурная схема фильтра и биквадратного блока для этого случая пред-
ставлена на рис. 3.17, а,в.
Рис. 3.17
Т-фильтры
. Для T-фильтра, описываемого разностным уравнением и пере-
даточной функцией в Z-области
yau
mimi
i
N
=
−
=
−
∑
0
1
; (3.47)
∑
−
=
−
=
1
0
)(
N
i
i
mi
zazW , (3.48)
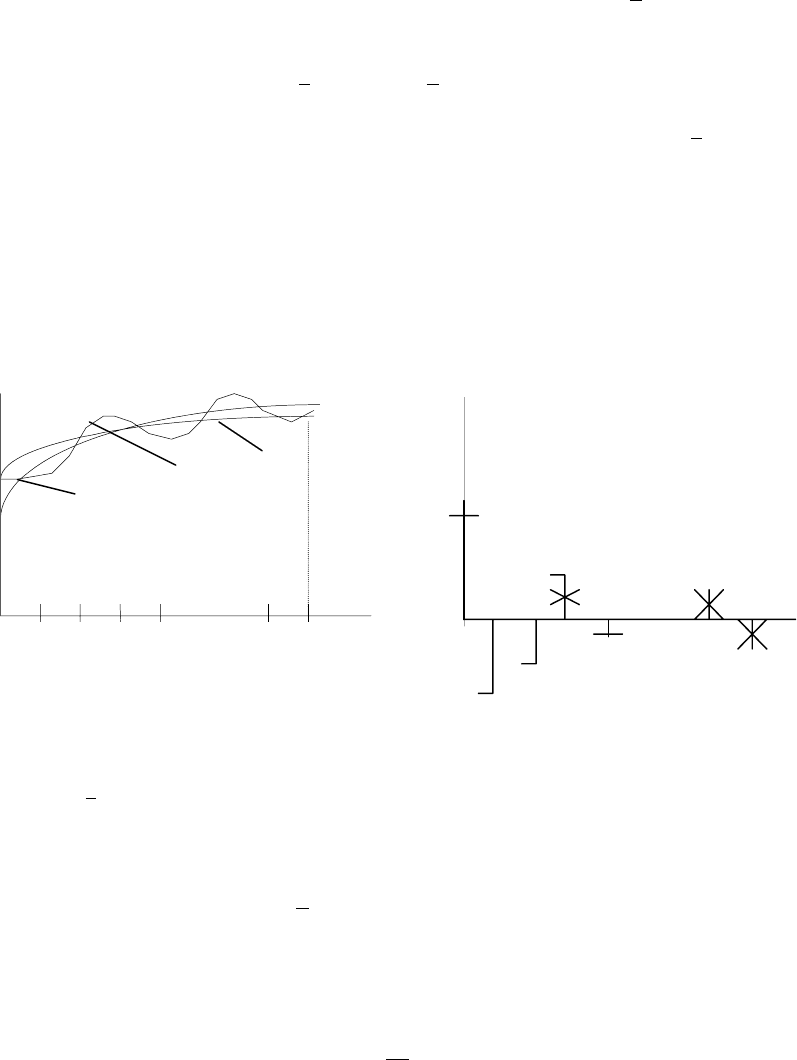
можно получить только две основные формы реализации: прямую (которая совпа-
дает с канонической) и каскадную каноническую. Структурная схема Т-фильтра
при прямой (или канонической) форме реализации приведена на рис. 3.18,а.
Рис. 3.18
Для реализации Т-фильтра в каскадной канонической форме передаточную
функцию представляют произведением в общем случае:
A
H
1
(z)
H
i
(z)
H
l
(z)
a)
u
m
y
m
B
Вх
Вых
-
β
1
z
-1
-
β
2
z
-1
α
1
б)
a
0
a)
u
m
y
m
Вх Вых
б)
a
N-2
a
N-1
z
-1
z
-1
α
1
z
-1
z
-1
α
2

53
Wz A z z A H z
ii
i
l
i
i
l
() ( ) ()=++=
−−
==
∏∏
1
1
1
2
2
11
αα
. (3.49)
Схема фильтра имеет тот же вид, что и схема соответствующего Р-фильтра,
но каждая передаточная функция H
i
(z) в общем случае реализуется квадратичным
блоком (рис.3.18,б).
3.11.Аналитический синтез фильтров методом подбора базиса
Рассмотрим метод аналитического синтеза спектральных ЦФ, основанный
на учете особенностей специально подбираемых СБФ. Этот метод позволяет запи-
сать задачу цифровой фильтрации в терминах выбранных СБФ, что в конечном
счете и обусловливает одну из важных его особенностей - возможность на единой
математической основе строить фильтры с различными критериями оптимизации.
Обратимся к
общей постановке задачи цифровой фильтрации, считая, что
входной сигнал представлен в виде
um gm nm gG m nm
kk
kr
r
() () () () ()=+= +
=−
∑
1
2
, (3.50)
где g
k
- некоторые коэффициенты, подлежащие определению; G
k
(m) - известные
функции времени; n(m) - аддитивная помеха, представляющая собой случайную
функцию времени с известными статистическими характеристиками. Спектр
входного сигнала по некоторой системе ортонормированных функций {
ϕ
α
(i)} за-
писывается выражением
cj
N
uj i i
i
N
αα
ϕ
() ( ) ()=−
=
−
∑
1
0
1
(3.51)
и вследствие свойства аддитивности шума состоит из двух составляющих:
cj cj cj
ααα
() () ()
*'
=+, (3.52)
где
cj
N
gj i i
i
N
αα
ϕ
*
() ( ) ()=−
=
−
∑
1
0
1
, (3.53)
cj
N
nj i i
i
N
αα
ϕ
'
() ( ) ()=−
=
−
∑
1
0
1
,
α
∈
[, ]0
N
. (3.54)
Здесь
cj
α
*
()- спектр полезного сигнала; cj
α
'
()- спектр помехи.
Если СБФ выбрана таким образом, что часть спектральных коэффициентов
при разложении полезного сигнала равна нулю, то данные коэффициенты в соот-
ветствии с выражением (3.52) содержат только шумовую составляющую, и, следо-
вательно, могут быть исключены без искажения полезного сигнала.
При восстановлении сигнала по оставшемуся спектру образуется сигнал
uj i()− , состоящий из той же полезной составляющей и оставшейся не отфильт-
рованной части помехи:
uj i gj i n j i c j j()()() ()()−= −+
′
−=
∑
α
α
α
ϕ
. (3.55)
В выражении (3.55) суммирование проводится по номерам неисключенных
спектральных коэффициентов, например, по номерам
α
, принадлежащим области
номеров
α
*
.
Вследствие указанных свойств используемой СБФ сигнал
uj i()− по виду
54
совпадает с полезной составляющей
gj i g jG j i
kk
kr
r
() ()()−= −
=−
∑
1
2
, (3.56)
однако имеет другие коэффициенты [обозначим их через
gj
k
()], которые пред-
ставляют собой оценку искомых параметров g
k
(j) полезного сигнала:
uj i g jG i
k
k
kr
r
() ()()−=
=−
∑
1
2
. (3.57)
Таким образом, при этом способе преобразования сигнал
uj i()− является
отфильтрованным, с определенной степенью точности аппроксимирующим ис-
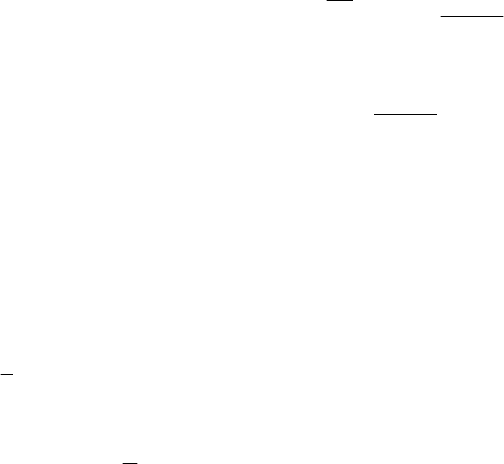
следуемый входной сигнала u(j - i). На рис. 3.19 приведена геометрическая интер-
претация процесса аппроксимации полезного сигнала (кривая 1) с наложенным
случайным шумом (кривая 2). Аппроксимирующая функция имеет вид кривой 3.
На рис. 3.20 представлено изображение этого процесса в спектральной области
базиса {
ϕ
α
(i)}, причем не учитываемые коэффициенты условно отмечены «кре-
стиком».
Рис. 3.19 Рис. 3.20
Для определения параметров аппроксимирующей функции (3.57) разложим
сигнал
uj i()− по системе функций {
ϕ
α
(i)}, тогда вследствие их ортогональности
из (3.55) и (3.57) нетрудно получить систему алгебраических уравнений связи
спектров входного и отфильтрованного сигналов
gjL cj
k
k
kr
r
() ()
αα
=
=−
∑
1
2
,
αα
∈
*
, (3.58)
Здесь индекс
α
имеет значения, принадлежащие области
α
*
, а величина L
k
α
, как и
ранее, представляет собой разложение функции G
k
(i) в базисе {
ϕ
α
(i)}:
L
N
Gi i
k
k
i
N
αα
ϕ
=
=
−
∑
1
0
1
() ()
. (3.59)
При заданных функциях G
k
(i) и рассчитанном спектре входного сигнала
c
α
(j), неизвестным в системе (3.58) будут только искомые параметры аппроксими-
рующей функции (3.57). В связи с этим задачу оценки параметров входного сиг-
нала можно свести к решению системы алгебраических уравнений (3.58).
Из возможных структурных организаций системы (3.58), зависящих от ви-
да аппроксимирующих функций и выбранного базиса, практическое значение
0 123 4 N-2 N-1
α
c
α
1
2
3
01234 N-2N-1i
55
имеют системы, в которых число уравнений равно числу неизвестных и число
уравнений системы превышает число неизвестных.
В первом случае система (3.58) имеет единственное решение
∑
∈
Δ
=
*
)(
)(
)(
αα
α
α
jc
A
jg
k
k
, (3.60)
представляющее собой запись уравнения спектральной свертки в базисе {
ϕ
α
(i)},
ядром которой является отношение
A
k
()
α
Δ
(здесь A
k
(
α
) - алгебраические дополне-
ния элементов k-го столбца k-го определителя системы (3.58), а Δ - главный опре-
делитель этой системы). Для некоррелированного шума решение в форме (3.60)
представляет собой решение задачи оптимальной фильтрации (оптимальной в
смысле равенства нулю систематической погрешности и минимума дисперсии
случайных погрешностей).
Во втором случае для решения системы (3.58) используются различные
ме-
тоды, позволяющие получить различные типы фильтрующих алгоритмов. Если
применить к ней известный метод нормальных уравнений Гаусса, то параметры
gj
k
() можно найти из решения эквивалентной системы уравнений, каждое k-е
уравнение которой запишется в виде
gj LL cjL
kk
r
r
λ
αα
λ
αα
αααα
λ
() ()
**
=
∈∈
=−
∑∑∑
1
2
, k = -r
1
, -r
1
+1,...,0,...,r
2.
(3.61)
Решение системы (3.61) можно также представить в форме уравнения
(3.60), причем в этом случае Δ и A
k
(
α
) - соответственно главный определитель и
алгебраические дополнения k-го определителя системы уравнений (3.61).
ГЛАВА 4
56
УПРАВЛЕНИЕ ТЕХНОЛОГИЧЕСКИМИ ПРОЦЕССАМИ
С СОСРЕДОТОЧЕННЫМИ ПАРАМЕТРАМИ
4.1. Введение
В отличие от классической теории управления, объектом изучения которой бы-
ли одномерные (один вход - один выход) системы, описываемые линейными диф-
ференциальными уравнениями с постоянными коэффициентами, так называемая
современная теория, так называемая современная теория управления содержит ре-
зультаты, применяемые для различных классов общих многомерных систем, вклю-
чая системы, задаваемые:
1.
линейными дифференциальными уравнениями с переменными коэффициен-
тами;
2.
нелинейными дифференциальными уравнениями;
3.
дифференциально-разностными и другими уравнениями с последействием;
4. уравнения с частными производными и интегральными уравнениями.
Современная теория управления включает так называемую теорию оптималь-
ного управления, с помощью которой можно разрабатывать оптимальные системы,
т.е. системы, при функционировании которых минимизируется или максимизирует-
ся некоторый выбранный заранее критерий качества.
Наряду с методами синтеза управляющих устройств и систем современная тео-
рия управления
включает методы идентификации и оценивания состояния процес-
сов. Различные алгоритмы идентификации процессов позволяют определять струк-
туру модели объекта управления и восстанавливать параметры этой модели как не-
посредственно в контуре управления, так и вне его. Эти алгоритмы используются
при синтезе не только обыкновенных, но и адаптивных систем управления, приспо-
сабливающихся к
таким изменениям характеристик управляемого процесса, кото-
рые могут иметь место, например, из-за обрастания поверхности теплообменника
или из-за понижения активности катализатора в химическом реакторе. Оценивание
состояний - это определение текущих значений таких переменных процесса, кото-
рые не могут быть измерены непосредственно или могут быть измерены лишь с
большими помехами. Особенно полезны
методы оценивания текущего состояния
для тех процессов, где недостаточно измерительных устройств или очень велика
цена отдельных значений.
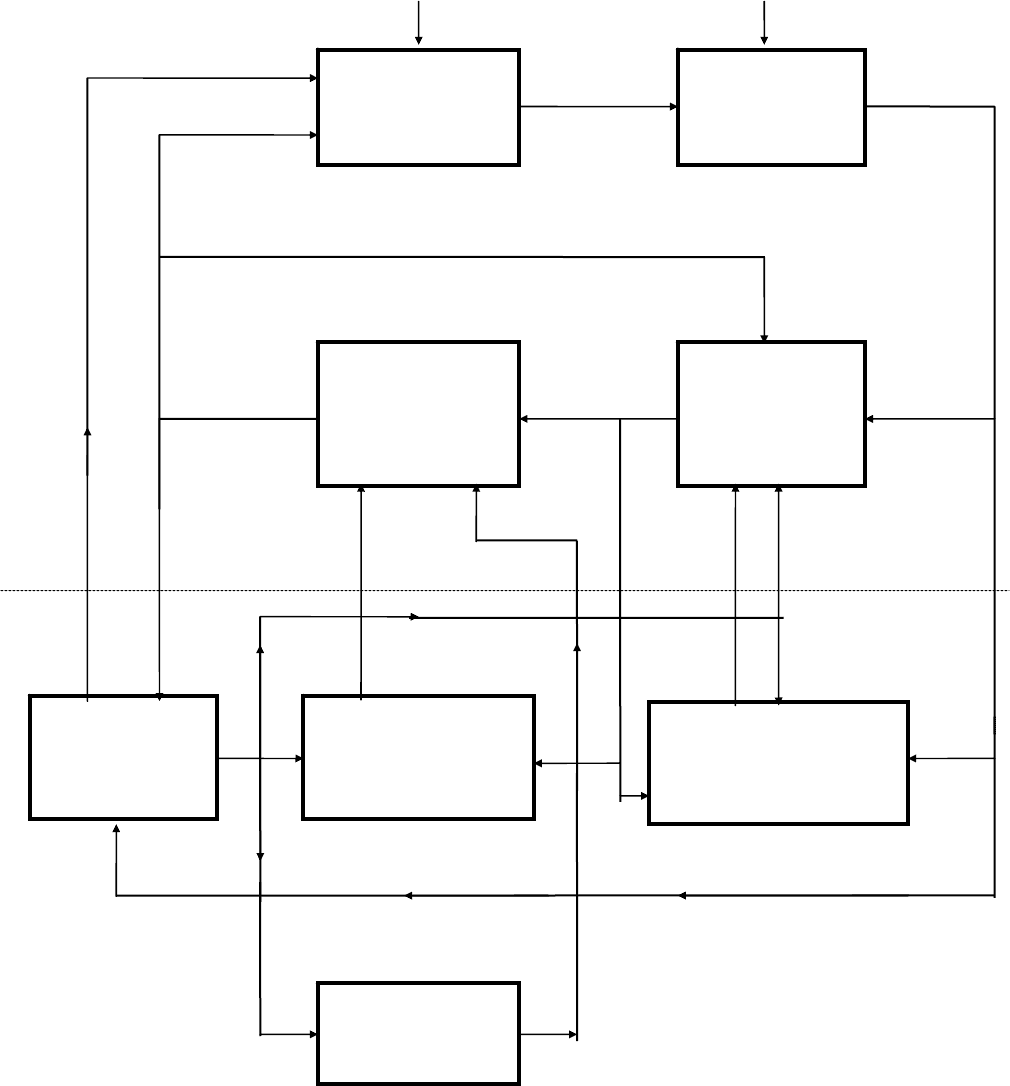
Для того чтобы лучше представить себе взаимосвязь перечисленных направле-
ний теории управления , рассмотрим следующий пример. На рис.4.1. показана
структура современной АСУТП, в состав которой входят:
1) управляемый процесс
с вектором управляющих воздействий u, вектором
контролируемых возмущений
d1 и вектором вспомогательных входных воздейст-
вий (позволяющих проводить идентификацию)
d 2;
2) измерительная система
, позволяющая контролировать некоторые перемен-
ные состояния и (или) их комбинации в условиях помех. Вектор измеряемых выхо-
дов
y поступает на вход
3) системы оценивания состояния
, которая по зашумленным наблюдениям и по
модели процесса строит наилучшую, в некотором смысле оценку состояния - век-
57
тор
$
x
. Система оценивания состояния характеризуется вектором параметров P,
рассчитываемым предварительно или в темпе с процессом по информации о пара-
метрах модели процесса
α, по измерению y и по текущим оценкам состояния
$
x
.
Оценки состояния процесса подаются в
4) управляющее устройство
, которое формирует управляющие воздействия u,
используя для этого текущие оценки состояния
$
x
, уставки ud, xd (эти уставки сами
могут быть получены в результате оптимизации), и вектор параметров
K. Парамет-
ры
K могут определяться предварительно или настраиваться по оценкам состояния
процесса
$
x
и по вектору параметров модели процесса α. Параметры модели про-
цесса определяются с помощью
5) системы идентификации
, которая по результатам обработки измерений y
восстанавливает вектор параметров модели процесса
α. При этом может оказаться
необходимым подавать дополнительно на вход объекта специальным образом
сформированные вспомогательные входные воздействия
d2. Если параметры не за-
висят от времени, процедуру идентификации можно выполнить однократно; если
же процесс нестационарен, процедуру необходимо периодически повторять, чтобы
обеспечить отслеживание изменяющихся условий.
На практике в состав системы управления могут входить не все, а только неко-
торые из перечисленных компонентов.
Возмущающие
Идентифицирующие воздействия Измерительные шумы
58
входные воздействия
d1 η
d2
x Измерительная y
U Процесс
истинное система измеряемые
управляющие состояние выходы
воздействия процесса
U
Устройство
U Управляющее
$
x
оценивания y
состояния
устройство
оценка процесса
состояния
процесса
x
d,Ud P α
K Режимные
установки В конце управления
Вне контура управления
U α
Система Система настройки Система настройки
идентификации α параметров
$
x
параметров устройства y
управляемого управляющего
$
x
оценки состояния
процесса устройства процесса
y
Оптимизация
режима
α процесса x
d,Ud
Параметры
модели
процесса
Рис.4.1
4.2. Математические модели объектов управления
(технологических процессов)
Математические модели объектов управления (ОУ) или технологических про-
59
цессов (ТП) можно классифицировать по разным признакам. Одна из возможных
классификаций моделей ОУ (ТП) следующая:
1.
одномерные - многомерные;
2. во временной области - в частотной области;
3. стационарные - нестационарные;
4. непрерывные - дискретные;
5. статические - динамические;
6. линейные по переменным - нелинейные по переменным;
7. детерминированные - стохастические;
8. с сосредоточенными параметрами - с распределенными параметрами.
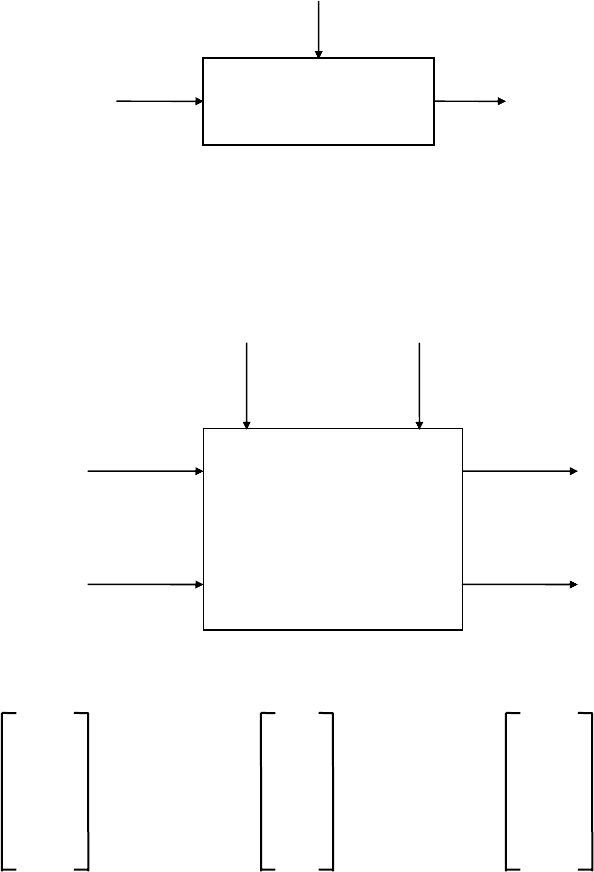
Схема одномерного ОУ(ТП) приведена на рисунке 4.2
z(t)
x(t) ОУ(ТП) y(t)
4.2.
Здесь x(t) - входной сигнал; y(t) - выходной сигнал; z(t) - возмущающее воздей-
ствие, действующее на ОУ(ТП).
Схема многомерного ОУ(ТП) приведена на рис. 4.3.
z
1
(t) ...........….. z
l
(t)
x
1
(t) y
1
(t)
. .
. .
. ОУ(ТП) .
x
n
(t) y
m
(t)
Рис.4.3
Введем обозначения
x
1
(t) y
1
(t) z
1
(t)
. . .
X(t) = . ; Y(t) = . ; Z(t) = . . (4.1)
. . .
x
n(t) ym(t) z
l
(t)
Здесь X(t) - вектор входных переменных (входной вектор). Пример входных пе-
ременных: свойства сырья (химический состав), размеры, механические свойства,
скорость подачи, стоимость). Вектор Y(t) есть вектор выходных переменных. При-
мер выходных переменных: характеристики полученного продукта или полуфабри-
ката (химический состав, размеры, количество, стоимость). Вектор Z(t) есть вектор
60
возмущающих воздействий, действующих на ОУ(ТП). Пример возмущающих воз-
действий: параметры, характеризующие условия протекания ТП (температура, дав-
ление, скорость подачи, число оборотов, производительность).
Модуль ОУ(ТП) называется линейной, если оператор А является линейным т.е.
выполняется принцип суперпозиции
n n
A [∑ k
i
x
i
(t)] = ∑ k
i
A[x
i
(t)] (4.2)
i=1 i=1
для любых n, k
i
и x
i
(t), i = 1,n; k
i
= const.
Пример оператора А:
t
A [x(t)] = dx(t) / dt; A[x(t)] = ∫ x(τ)dτ . (4.2)
o
В классе линейных стационарных моделей ОУ(ТП) с одной выходной перемен-
ной y(t) и одной входной переменной x(t) может быть представлен в виде диффе-
ренциального уравнения
a
dyt
dt
i
i
n
i
i
=
∑
0
()
=
b
dxt
dt
j
j
m
j
j
=
∑
0
()
, n≥m (4.3)
или интегрального уравнения с весовой функцией w(τ):
∞
y(t) = ∫ w(τ)x(t-τ)dτ. (4.4)
0
Соотношения (4.3), (4.4) есть одномерные модели ОУ(ТП) во временной облас-
ти.
Модели (4.3) соответствует модель ОУ(ТП) в виде передаточной функции.
W(S) =
YS
XS
()
()
=
bS b S b
aS a S a
m
m
m
m
n
n
n
n
+++
+++
−
−
−
−
1
1
0
1
1
0
...
...
(4.5)
Передаточная функция W(S) связанная с весовой функцией w(τ) преобразова-
нием Лапласа
∞
W(S) = ∫ w(τ) e
-sτ
dt (4.6)
0
или
W(S) =L {w(t)};
w(t) =L
-1
{W(S)};
Здесь L {...} - преобразование Лапласа в выражения в фигурных скобках;
L
-1
{...}- обратное преобразование Лапласа в выражения в фигурных скобках;
Y(S) = L{y(t)}; X(S) = L{x(t)}.
Частотная характеристика ОУ(ТП) W(jw) определяется соотношением