Гаспер Б.С., Липатов И.Н. ИВС и АСУТП. Учебное пособие
Подождите немного. Документ загружается.

41
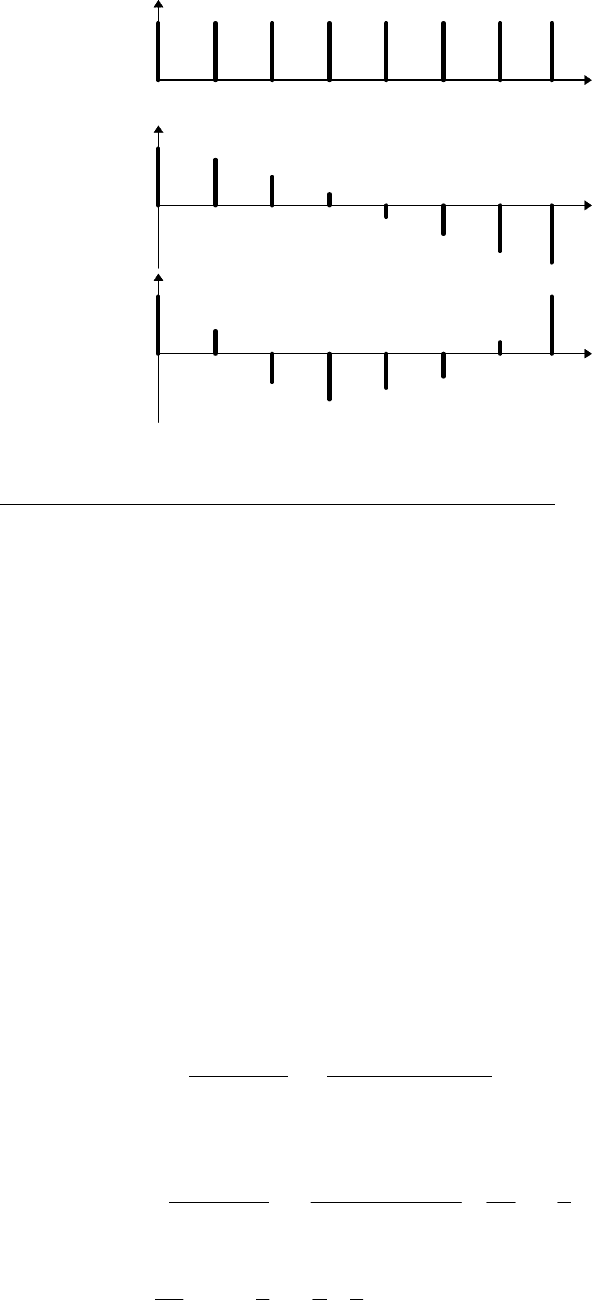
Рис. 3.9
Двоично-ортогональные системы базисных функций
. Под этим условным
названием объединены системы функций меандрового типа Радемахера, Уолша и
Хаара, интервал ортогональности которых при их построении представляется со-
вокупностью двоично-рационального числа равных подынтервалов. Эти системы
имеют важное значение для практики спектральной обработки, поскольку прини-
мают только значения ±1 (функция Радемахера и Уолша) либо ±1 и 0 (функция
Хаара) и легко могут быть получены с помощью цифровых устройств.
Все эти системы взаимосвязаны друг с другом и каждую из них можно по-
лучить из другой, образуя соответствующую линейную комбинацию.
Базисные функции представляют собой функции различных физических
аргументов с различными интервалами ортогональности. Сигнал, в свою очередь,
может быть также функцией
другой переменной с интервалом определения, отли-
чающимся от интервала ортогональности базисных функций. При спектральном
представлении таких сигналов необходимо привести оси и интервал ортогональ-
ности аргумента базисных функций к оси и интервалу изменения переменной сиг-
нала.
В общем случае, если сигнал является функцией переменной
ξ
с интерва-
лом [
ξ
min
,
ξ
max
), а функции базисной системы зависят от аргумента
γ
и ортогональ-
ны на интервале [
γ
min
,
γ
max
), преобразование оси
γ
в ось
ξ
и совмещение интервалов
можно осуществить подстановкой:
γ
γ
γ
ξξ
ξ
γ
ξ
γ
ξ
ξξ
=
−
−
+
−
−
max min
max min
min max max min
max min
. (3.32)
Например, если
γ
∈[-1, 3), а
ξ
∈[-T, 2T), то в соответствии с преобразовани-
ем (3.32)
3
1
3
4
)(2
)(32)1(
)(2
)1(3
+=
−−
−
−
−
+
−−
−−
=
ξξγ
TTT
TT
TT
.
Проверим записанную взаимосвязь
γ
и
ξ
на граничных значениях
ξ
. При
ξ
=
-T значение
γ
=−+=−+=−
4
3
1
3
4
3
1
3
1
T
T() . При
ξ
= 2T значение
p
o
l
0
1
0123
45
67
p
o
l
1
7/3
i
i
p
o
l
2
7/3
i
-7/3
5/3
42
3
3
1
3
8
3
1
)2(
3
4
=+=+= T
T
γ
. Полученные значения совпадают с заданными. Если
интервалы разносторонние, например
γ
∈[-
π
,
π
),
[
)
,,0 Ta
∈
ξ
то, исходя из
(3.32), найдем
πξ
π
π
π
ξ
π
π
γ
−=
−
⋅
−
−
+
−
−−
=
TT
T
T
2
0
0)(
0
)(
.
Проверка подтверждает справедливость и этой формулы.
Преобразование осей и приведение интервалов необходимо учитывать при
использовании спектральной формы представления сигналов.
3.4. Функции Радемахера
Для того чтобы кусочно-постоянные базисные ортогональные функции
могли использоваться при обработке информации, нужно, чтобы так же, как сину-
соиды и косинусоиды, они принимали не только положительные, но и отрица-
тельные значения.
Этому требованию удовлетворяют описываемые ниже кусочно-постоянные
ортогональные функции Радемахера. Если принять за основу синусоидальные ко-
лебания sin(2
m
πθ
), где m - целое положительное число, и принять для произволь-
ной величины
ξ
, что sing(
ξ
)=1 при
ξ
>0 и sign(
ξ
)=-1 при
ξ
<0, то функции Радемахе-
ра
rad(m,
θ
) = sign[sin(2
m
πθ
)]. (3.33)
По формуле (3.33) определяются функции Радемахера для m=1,2,... Для
m=0 функция Радемахера rad(0,
θ
)=1.
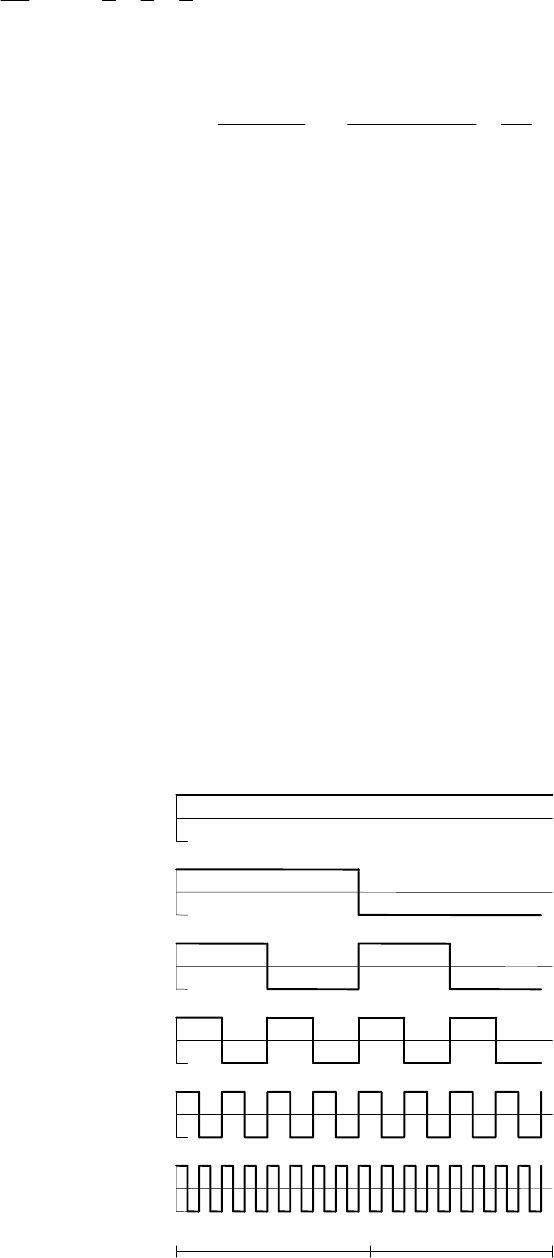
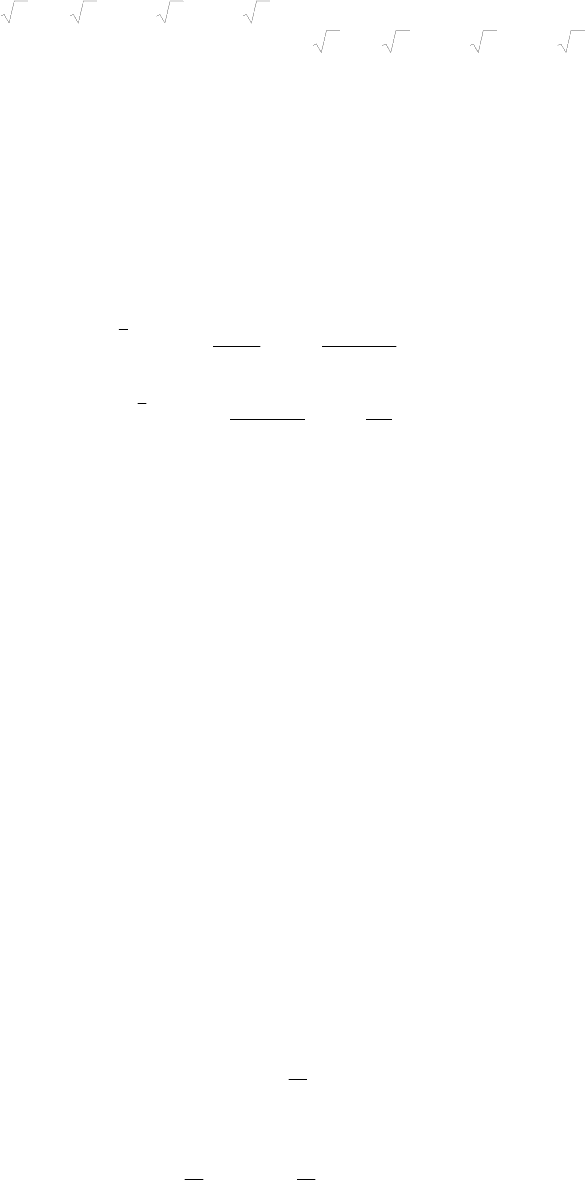
На рис. 3.10 показаны функции Радемахера при значениях m от 0 до 5. Они
показаны при задании
θ
в интервале 0≤
θ
<1.
Рис. 3.10
Вообще же эти функции являются периодическими функциями с периодом
Rad(0,
θ
)
1
0
-1
Rad(1,
θ
)
1
0
-1
Rad(2,
θ
)
1
0
-1
Rad(3,
θ
)
1
0
-1
Rad(4,
θ
)
1
0
-1
Rad(5,
θ
)
1
0
-1
010,5
θ
43
1: rad(m,
θ
)=rad(m,
θ
+1). Рис. 3.10 показывает, что функции Радемахера с номерами
m от 2 и выше периодичны также и на меньших интервалах, число которых зави-
сит от величины m.
Формула (3.33) позволяет сравнить функции Радемахера с синусоидами и
дает наглядное представление о процедуре их получения.
На рисунке были показаны непрерывные функции Радемахера
. Дискретные
функции Радемахера, для которых принято обозначение Rad(m,
θ
), получаются пу-
тем выборки их из непрерывных функций при дискретных значениях
θ
в интерва-
ле 0≤
θ
<1. Например, при отсчетах, сделанных для восьми точек этого интервала,
получаем значения Rad(2,
θ
), равные 1,1,-1,-1,1,1,-1,-1.
В отличие от полного набора синусоид и косинусоид, все функции Раде-
махера нечетные. Это препятствует аппроксимации их с помощью четных функ-
ций (они образуют, как говорят, неполный набор функций). Поэтому их примене-
ние ограничено.
Полными ортогональными системами базисных кусочно-постоянных
функций являются системы функций Уолша и Хаара.
3.5. Функции Уолша
Для нормированных функций Уолша принято обозначение wal(n,
θ
), где n -
номер функции, а
θ
находится в интервале 0≤
θ
<1. Обычно рассматривается мно-
жество функций Уолша wal(n,
θ
) при n=0,1,...,N-1, где N=2
i
и i=1,2,3,...
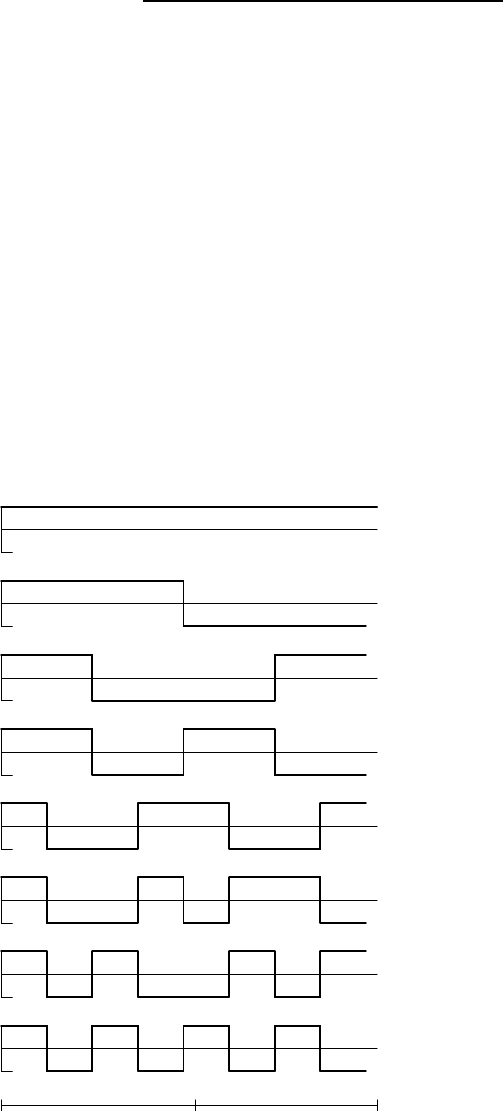
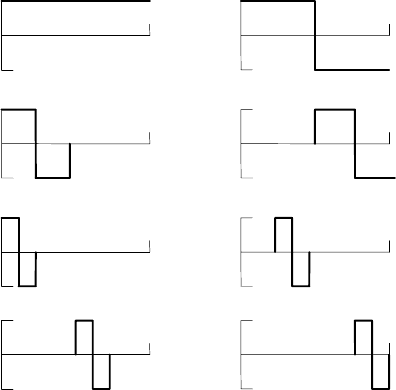
Первые восемь функций Уолша изображены на рис. 3.11[5].
Рис. 3.11
Функции Уолша различают по их порядку и рангу. Под порядком имеют
wal
(
0
,
θ
)
1
0
-1
wal
(
1
,
θ
)
1
0
-1
wal
(
2
,
θ
)
1
0
-1
wal
(
3
,
θ
)
1
0
-1
w
al
(
4
,
θ
)
1
0
-1
wal
(
5
,
θ
)
1
0
-1
010
,
5
θ
wal
(
6
,
θ
)
1
0
-1
wal
(
7
,
θ
)
1
0
-1
44
ввиду максимальный из содержащих единицу номеров разрядов при двоичном
представлении числа n, рангом называют число единиц в двоичном выражении n.
Например, порядок и ранг функции wal(5,
θ
) равны соответственно 3 и 2, так как
двоичным выражением числа 5 является 101 (имеется ввиду обычное двоичное
кодирование чисел; см. второй столбец табл. 3.2). Функции Уолша могут быть
представлены в виде произведений функций Радемахера (см. табл. 3.3). Номера
функций Радемахера, образуюших функции Уолша wal(n,
θ
) определяются по но-
мерам последних, выраженных в двоичном коде Грея. Для чисел n от 0 до 15 их
нумерация кодом Грея дана в последнем столбце табл.3.2. Номера перемножае-
мых функций Радемахера отвечают номерам разрядов, в которых имеются едини-
цы, закодированного кодом Грея числа n. Разряды отсчитываются, начиная с
младшего разряда. Так определяются
как произведение функций Радемахера
функции wal(n,
θ
) для любых n.
Код Грея связан следующим образом с обычным двоичным кодом. Если в
обычной двоичной системе исчисления число n=a
k-1
a
k-2
...a
0
, то в коде Грея n=b
k-1
b
k-
2
...b
0
, где b
0
=a
0
⊕a1, b
1
=a
1
⊕a
2
,...,b
k-1
=a
k-1
; ⊕ - знак суммирования по модулю два
(0⊕0=0; 0⊕1=1; 1⊕0=1; 1⊕1=0). Например, n=2 в обычном двоичном коде запи-
сывается как 10. Здесь a
1
=1, a
0
=0. Следовательно, b
0
=a
0
⊕a
1
=0⊕1=1, b
1
=a
1
=1. Сле-
довательно, число n=2 представляется как 11, что и указано в табл.3.2.
Функции Уолша могут быть упорядочены по Уолшу. На практике широко
используется также и другие способы упорядочивания функций Уолша. Имеется
упорядочивание функций Уолша по Пэли, упорядочивание функций Уолша по
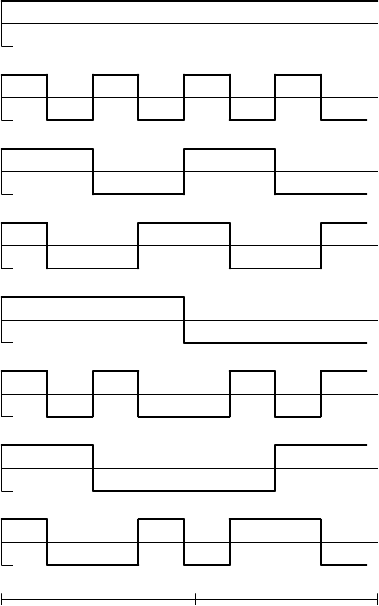
Адамару. На рис. 3.12. показаны первые восемь функций Уолша-Адамара had(n,
θ
).
Рис. 3.12
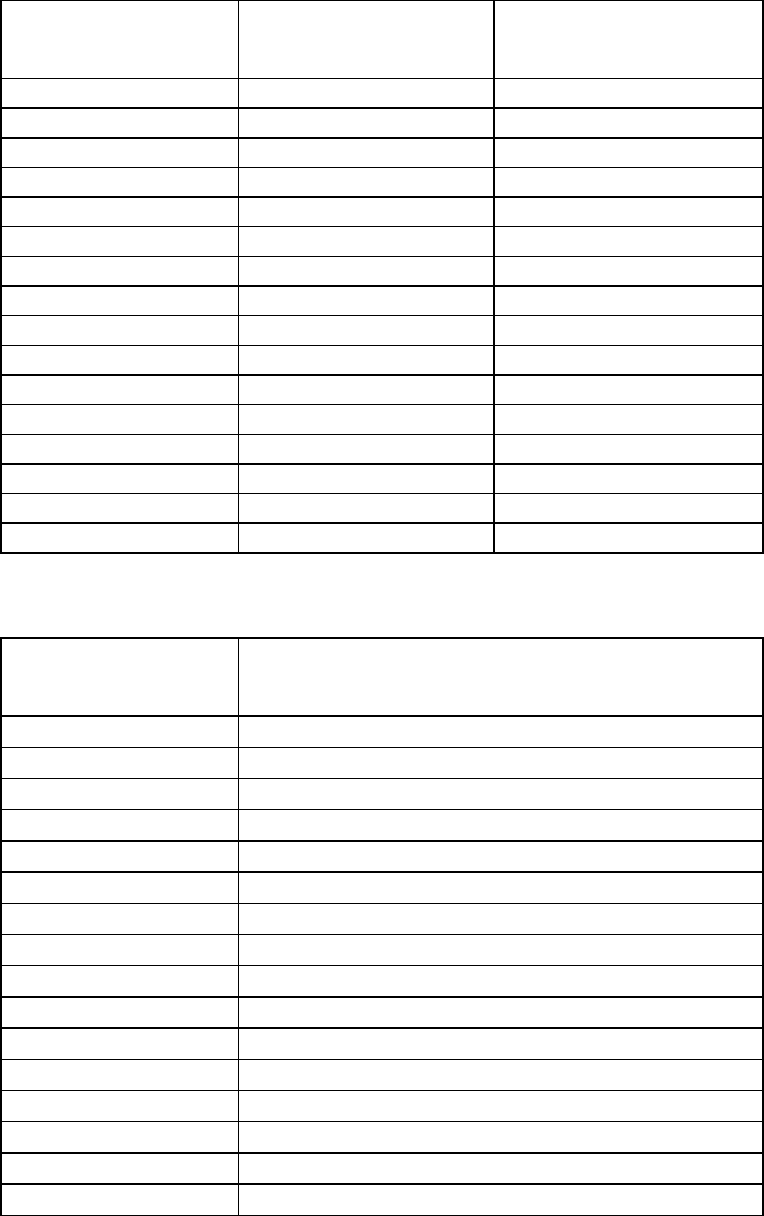
Таблица 3.2
had
(
0
,
θ
)
1
0
-1
had
(
4
,
θ
)
1
0
-1
had
(
6
,
θ
)
1
0
-1
had
(
2
,
θ
)
1
0
-1
had
(
3
,
θ
)
1
0
-1
had
(
7
,
θ
)
1
0
-1
010
,
5
θ
had
(
5
,
θ
)
1
0
-1
had
(
1
,
θ
)
1
0
-1
45
n-N
0
функции Уолша
(упорядоченной по
Уолшу)
Выражение n в обычном
двоичном коде
Выражение n в коде Грея
0 0000 0000
1 0001 0001
2 0010 0011
3 0011 0010
4 0100 0110
5 0101 0111
6 0110 0101
7 0111 0100
8 1000 1100
9 1001 1101
10 1010 1111
11 1011 1110
12 1100 1010
13 1101 1011
14 1110 1001
15 1111 1000
Таблица 3.3
n-N
0
функции Уолша
(упорядоченной по
Уолшу)
Формулы перехода от функций rad(m,θ) к функ-
циям wal(n,θ)
0
wal(0,θ)=1
1
wal(1,θ)=rad(1,θ)
2
wal(2,θ)=rad(1,θ)rad(2,θ)
3
wal(3,θ)=rad(2,θ)
4
wal(4,θ)=rad(2,θ)rad(3,θ)
5
wal(5,θ)=rad(1,θ)rad(2,θ)rad(3,θ)
6
wal(6,θ)=rad(1,θ)rad(3,θ)
7
wal(7,θ)=rad(3,θ)
8
wal(8,θ)=rad(3,θ)rad(4,θ)
9
wal(9,θ)=rad(1,θ)rad(3,θ)rad(4,θ)
10
wal(10,θ)=rad(1,θ)rad(2,θ)rad(3,θ) rad(4,θ)
11
wal(11,θ)=rad(2,θ)rad(3,θ)rad(4,θ)
12
wal(12,θ)=rad(2,θ)rad(4,θ)
13
wal(13,θ)=rad(1,θ)rad(2,θ)rad(4,θ)
14
wal(14,θ)=rad(1,θ)rad(4,θ)
15
wal(15,θ)=rad(4,θ)
3.6.Функции Хаара
46
Широкому применению функций Уолша способствует то, что они прини-
мают только одно из двух значений +1 или -1, и это удобно для цифровой обра-
ботки информации на ЭВМ. Первые две функции Хаара - такие же, как и соответ-
ствующие функции Уолша, упорядоченные по Уолшу или по Пэли. Функции Хаа-
ра принимают на отдельных
участках одно из трех значений: 0, +1 и -1, что также
удобно для выполнения цифровой обработки на ЭВМ.
Наибольшее применение имеют функции Уолша. Однако иногда оказыва-
ется более целесообразным использование в качестве базисных функций Хаара.
Это связано с тем, что, выполняя рассматриваемые далее преобразования, при
принятии за базисные функций Хаара иначе учитывают поведение
исходной
функции, когда определяют коэффициенты разложения последней, чем это дела-
ется при использовании в качестве базисных, функций Уолша. Благодаря указан-
ному свойству функций Хаара, в некоторых случаях их использование оказывает-
ся более экономичным.
Функции Хаара определяются при каждом значении
θ
(которое тоже будем
здесь считать заданным в интервале 0≤
θ
<1) двумя величинами, для которых при-
мем обозначения l и n. Первое из них является номером подразделения в системе
функций Хаара, второе - номером функции в соответствующем подразделении.
Значения функций на участках, на которых эти значения отличны от нуля, различ-
ны для разных подразделений. Для функций Хаара приняты обозначения har(l,n,
θ
),
X
l
n
()
θ
или H
l
n
()
θ
. Будем пользоваться последними обозначениями.
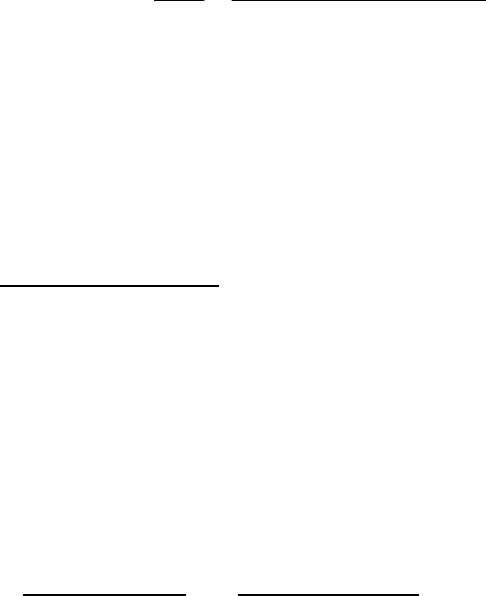
Первые восемь функций Хаара представлены на рис. 3.13[5]. В нижней час-
ти рис. 3.13 изображена матрица дискретных значений функций Хаара. Каждая
строка матрицы отвечает соответствующей функции.
Для формирования N функций Хаара используется следующая формула
1
0
-1
0
1
θ
1
0
-1
0
1
θ
1
0
-1
0
1
θ
1
0
-1
0
1
θ
1
0
-1
0
1
θ
1
0
-1
0
1
θ
1
0
-1
0
1
θ
1
0
-1
0
1
θ
H
0
0()
()
θ
H
1
1()
()
θ
H
2
1()
()
θ
H
2
3()
()
θ
H
0
1()
()
θ
H
1
2()
()
θ
H
2
2()
()
θ
H
2
4()
()
θ
47
Рис. 3.13
⎪
⎪
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎪
⎪
⎨
⎧
∈
<≤
−
≥−
−
<≤
−
≥
=
),1,0[0
,
22
2/1
2
,
2
2/1
2
1
2
)(
2
2
)(
θθ
θθ
θθ
θ
гделюбыхпри
nn
при
nn
при
H
ll
l
ll
l
n
l
(3.34)
где 0 ≤ l < log
2
N и 1 ≤ n ≤ 2
l
.
3.7. Преобразование Уолша и Хаара
Аналогично тому, как производится разложение функций в ряд Фурье, вы-
полняется оно и при использовании функций Уолша и Хаара в качестве базисных
функций. Для функции x(t), нормализованной соответствующим образом, форму-
ла разложения x(t) в ряд Уолша имеет следующий вид
xt Xnwalnt
n
() () (,)=
=
∞
∑
0
, (3.35)
где wal(n,t) - п-я по порядку следования функция Уолша и X(n) - спектр Уолша.
В литературе встречаются различные обозначения спектра Уолша и по раз-
ному обозначаются базисные функции Уолша. В дальнейшем для спектра Уолша
принято обозначение с
α
и для функций Уолша обозначение W
α
(t/T) в связи с тем,
что функции нормализуются при t∈[0,T).
Ряд Уолша одномерного сигнала x(t), t∈[0,T) будет иметь вид
∑
∞
=
⎟
⎠
⎞
⎜
⎝
⎛
=
0
)(
α
αα
T
t
Wсtx , (3.36)
где спектр Уолша
∫
⎟
⎠
⎞
⎜
⎝
⎛
=
T
dt
T
t
Wtx
T
с
0
)(
1
αα
. (3.37)
В этом случае равенство Парсеваля
1 1 1 1 1 1 1 1
1 1 1 1 -1 -1 -1 -1
2
2
− 2
− 2
0 0 0 0
0 0 0 0
2
2
− 2
− 2
2 -2 0 0 0 0 0 0
0 0 2 -2 0 0 0 0
0 0 0 0 2 -2 0 0
0 0 0 0 0 0 2 -2
H
*
()3 =
⎡
⎣
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎢
⎤
⎦
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥
⎥

48
∑
∫
∞
=
=
0
2
0
2
)(
1
α
α
сdttx
T
T
. (3.38)
усеченные ряды Уолша
∑
−
=
⎟
⎠
⎞
⎜
⎝
⎛
=
1
0
*
)(
N
T
t
Wсtx
α
αα
(3.39)
обладают равномерной, среднеквадратической сходимостью и сходимостью в
среднем и могут быть использованы для аппроксимации сигналов, описываемых
интегрируемыми функциями.
3.8. Применения преобразований Уолша и Хаара
Успешному использованию преобразований Уолша и Хаара способствова-
ло изучение следующих вопросов: свойства функций Уолша; свойства спектров
Уолша; общие вопросы применения функций Уолша при выполнении преобразо-
ваний; алгоритмы быстрого преобразования Уолша; вычисление корреляционных
функций и выполнение сверток на базе функций Уолша; применение функций
Уолша для исследования случайных процессов; использование функций Уолша
при построении цифровых фильтров.
Для области автоматического управления является актуальным применение
преобразований Уолша при анализе динамики линейных и нелинейных систем,
разработке систем оптимального управления, моделировании процессов, иденти-
фикации объектов, разработке ряда специальных устройств автоматики.
Практически важным является предложенное Х. Хармутом использование
функций Уолша для формирования сигналов, передаваемых по линиям радиосвя
-
зи. Предложено использовать их в качестве несущих при распространении сигна-
лов в радиоканале над поверхностью Земли, проработаны вопросы генерирования
и приема сигналов этого вида. Функции Уолша применены при разработке мно-
гоканальных систем связи. На основе использования функций Уолша разработаны
усовершенствованные методы помехоустойчивого кодирования сигналов.
Преобразования Хаара, хотя они используются в
меньшей степени, чем
преобразования Уолша, тоже находят применение при разработке и исследовании
средств автоматики. Быстрое преобразование Хаара используется при анализе
процессов. С помощью функций Хаара можно эффективно осуществлять свертки
сигналов. Функции Хаара использованы при разработке цифровых фильтров, при
исследовании случайных процессов, а также при разработке конкретных типов
устройств в системах
управления и связи.
3.9. Классы фильтров и их математическое описание
В зависимости от вида входного сигнала различают фильтры непрерывные
(аналоговые) и дискретные (цифровые). Фильтры обоих видов могут быть линей-
ными и нелинейными. Свойства фильтров могут быть описаны как во временной,
так и в частотной области. Частотные характеристики используются довольно час-
то (и для цифровых фильтров - ЦФ), так как их
удобнее применять и они более
49
наглядно иллюстрируют физические свойства фильтров. Так, по виду частотных
характеристик различают фильтры нижних частот, фильтры высоких частот, по-
лосовые фильтры и запирающие фильтры (фильтры-«пробки»), выполняющие
операции выделения тех или иных частотных составляющих из общего спектра
входного сигнала. Наряду с ними есть фильтры, производящие более сложные
операции, например операции выделения, дифференцирования
и экстраполяции
сигналов в условиях действия случайных помех.
В общем случае, выходной сигнал ЦФ в текущий момент времени опреде-
ляется значением входного сигнала u(m
Δ
t)=u[m]=u
m
в тот же момент дискретного
времени m, значениями входных и выходных сигналов y(m
Δ
t)=y[m]=y
m
в предше-
ствующие моменты времени и описывается разностным уравнением
y
m
= a
0
u
m
+ a
1
u
m-1
+...+ a
N-1
u
m-N-1
- b
1
y
m-1
- b
2
y
m-2
-...- b
k
y
m-k
. (3.40)
Передаточная функция ЦФ в Z-области имеет вид
k
k
N
N
zbzb
zazaa
zU
zY
zW
−−
−−
−
−
+++
+++
==
...1
...
)(
)(
)(
1
1
)1(
1
1
10
. (3.41)
Общее описание ЦФ как дискретной системы уравнениями (3.40) и (3.41)
позволяет создать набор алгоритмов, которые непосредственно используются для
реализации в виде ЦФ или для программирования ЦВМ. Этот набор алгоритмов
создается путем варьирования величин N, k, a
i
, b
j
. Рассмотрим вопрос физической
реализуемости передаточной функции (3.41). С теоретической точки зрения пере-
даточная функция (3.41) реализуема всегда, за исключением того случая, когда все
коэффициенты a
i
=0, что с физической точки зрения представляет фильтр с отклю-
ченным входом.
Рекурсивный фильтр
- это фильтр, в котором для расчета текущей выход-
ной величины используется по меньшей мере одно значение входной величины и
одно из полученных ранее значений выходных величин. Математически это фор-
мулируется так: рекурсивный фильтр - это фильтр, заданный уравнением (3.40)
или (3.41), в котором по меньшей мере одно значение b
j
и одно значение a
i
не
равно нулю. При этом рекурсивный фильтр обладает такой памятью, что значения
всех отсчетов фильтруемого сигнала от 0 до текущего момента с некоторым весом
участвуют в формировании текущего значения выходной величины. Для кратко-
сти будем называть такой фильтр P-фильтром, и тогда в сжатой форме определе-
ние будет иметь следующий вид: P-фильтр -
это такой фильтр, у которого не все b
j
=0 и T=t→∞, где T- память фильтра.
В нерекурсивном,
или трансверсальном, фильтре в отличие от рекурсивно-
го ни одна из полученных ранее выходных величин не используется для расчета
текущей выходной величины (все b
j
=0). Он обладает принципиально конечной
памятью (определяемой интервалом [t, t-T] или [m, m-N+1], т.е. N≠∞. По аналогии
с предыдущим трансверсальный фильтр для кратности будем называть T-
фильтром. При этом определение имеет вид: T-фильтр - это такой фильтр, у кото-
рого все b
j
=0 и T=(N-1)
Δ
t. Эти фильтры характеризуются разностным уравнением
и передаточной функцией в Z-области вида
yauau au au
mmm NmN imi
i
N
=+ ++ =
−−−+ −
=
−
∑
011 11
0
1
... ; (3.42)
∑
−
=
−+−
−
−
=+++=
1
0
1
1
1
10
...)(
N
i
i
i
N
N
zazazaazW . (3.43)
Совокупность коэффициентов a
i
часто рассматривается как функция, кото-
50
рая называется импульсной переходной функцией (ИПФ).
Для выполнения таких операций, как сглаживание (низкочастотная фильт-
рация), интерполяция и экстраполяция (задержка и предсказание), дифференциро-
вание, а также для реализации комбинаций перечисленных операций широко при-
меняется T-фильтр.
3.10. Формы реализации передаточных функций
Рассмотрим структурные схемы реализации передаточных функций ЦФ,
составленные на основе использования трех элементов: сумматора, умножителя и
элемента задержки. Соотношения между входом и выходом в этих элементах
представляются в виде
∑
=
=
n
i
ikk
Uy
1
, y
k
= a
i
U
k
, y
k
= U
k-1
.
Отметим возможные формы реализации для каждого класса фильтров (P и
T) в отдельности. Отметим, что со структурной точки зрения P-фильтры представ-
ляют собой устройства с обратными связями, а T-фильтры - устройства без обрат-
ных связей.
P-фильтры
. Для одной и той же передаточной функции P-фильтра, можно
получить четыре основные формы реализации: прямую, каноническую, каскадную
каноническую и параллельную каноническую.
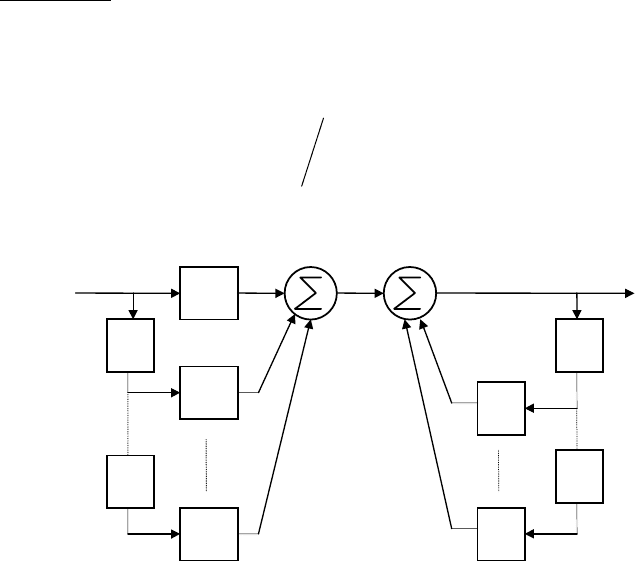
Прямая форма реализации получается из непосредственной интерпретации
передаточной функции
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+=
∑∑
=
−
−
=
−
k
j
j
j
N
i
i
i
zbzazW
1
1
0
1)(
. (3.44)
Схема прямой формы реализации представлена на рис. 3.14.
Рис. 3.14
a
0
a
1
a
N-1
-b
1
-b
k
z
-1
z
-1
z
-1
z
-1
u
m
y
m