Гаспер Б.С., Липатов И.Н. ИВС и АСУТП. Учебное пособие
Подождите немного. Документ загружается.

111
FxFx
iVi
i
r
μ
() () ,=
=
∑
0
0
∀
≠
μ
v (5.135)
или в обобщенном виде
ω
μ
() () () ,xF xF xdx
v
a
b
=
∫
0
∀
≠
μ
v , (5.136)
где
μ
,v - неотрицательные целые числа, а r - число измерений.
Для идентификации коэффициентов
b
j
, в уравнении (5.134) потребуем, что-
бы
r ≥ m+1.
При аппроксимации с помощью ортогональных полиномов наиболее целе-
сообразно использовать полиномы Чебышева. Полиномы Чебышева записываются
в форме
FT v
vv
() () cos( arccos())
ξ
ξ
ξ
=
=
⋅
,
−
≤
≤
11
ξ
(5.137)
и обладают следующими взвешенными свойствами ортогональности:
(5.138)
где
1
2
−
ξ
- весовой коэффициент
ω
(
ξ
) из уравнения (5.136). Несколько полино-
мов Чебышева низкого порядка приведено ниже:
⎪
⎪
⎪
⎪
⎪
⎭
⎪
⎪
⎪
⎪
⎪
⎬
⎫
−+−=
+−=
+−=
−=
−=
=
=
.1184832)(
;52016)(
;188)(
;34)(
;12)(
;)(
;1)(
246
6
35
5
24
4
3
3
2
2
1
0
ξξξξ
ξξξξ
ξξξ
ξξξ
ξξ
ξξ
ξ
T
T
T
T
T
T
T
(5.139)
Независимая переменная [
x в уравнении (5.134)] обычно должна быть пре-
образована так, чтобы она удовлетворяла требованиям к области изменения
ξ
в
уравнении (5.137). При известном
T
v
(
ξ
) значение T
v+1
(
ξ
) может быть определено из
соотношения
TTT
vvv+−
=
−
11
2() () ()
ξ
ξ
ξ
ξ
, (5.140)
что следует из определения
T
v
(
ξ
) в уравнении (5.137).
Аппроксимационный полином Чебышева для
$
y , составленный по методу
наименьших квадратов для выходной переменной
y, получают на основе миними-
зации
S, где
SybTd
ii
i
m
=−
⎡
⎣
⎢
⎤
⎦
⎥
−
=
∫
∑
ωξ ξ ξ ξ
() () ()
1
1
0
2
, (5.141)
что дает
TT
v
μ
ξξ
ξ
π
π
() ()
1
0
2
2
1
1
−
=
⎧
⎨
⎪
⎪
⎩
⎪
⎪
−
∫
при
μ
≠ v,
при
μ
= v ≠ 0,
при
μ
= v = 0,
112
при k = 0,
(5.142)
при k ≠ 0,
так что
$
() ()ybT
kk
k
m
ξξ
=
=
∑
0
. (5.143)
Относительно простые алгоритмы для вычисления b
k
получаются благодаря свой-
ству ортогональности. Видно, что b
k
в уравнении (5.142) не зависит от выбора m.
Следовательно, изменение m не требует пересчета b
j
для j ≤ m, тогда как этот пе-
ресчет при неортогональной аппроксимации необходим, что влечет за собой су-
щественные затраты времени.
Кроме того, при
ξ
π
i
i
n
=
+
⎡
⎣
⎢
⎤
⎦
⎥
cos
()21
2
, i = 0,1, ... , n-1, (5.144)
полиномы Чебышева обладают следующим свойством дискретной ортогонально-
сти для
μ
, v<n :
(5.145)
Видно, что в уравнении (5.145) вес
ω
(
ξ
) из уравнения (5.136) равен едини-
це. Следовательно, величина
ω
(
ξ
) в уравнении (5.141) также равна единице и
можно вычислить коэффициенты b
k
аппроксимационного полинома Чебышева
$
y
для y, минимизирующие S по формуле
Sy bT
jkkj
k
m
j
n
=−
⎡
⎣
⎢
⎤
⎦
⎥
==
−
∑∑
() ()
ξξ
0
2
0
1
, (5.146)
что дает
b
n
y
j
j
n
0
0
1
1
=
=
−
∑
()
ξ
, (5.147)
b
n
yT
kj
j
n
kj
=
=
−
∑
2
0
1
()()
ξξ
. (5.148)
Таким способом эти коэффициенты вычисляются гораздо проще, чем по
уравнению (5.142), хотя при этом требуется знать y(
ξ
i
) при
ξ
i
, определяемых из
уравнения (5.144).
5.13. Идентификация нелинейных функций априорно известного вида
Во многих случаях, имеется нелинейная аналитическая модель, полученная
на основе теоретических соображений, и требуется провести идентификацию ее
b
yT d
Td
y
d
yT
d
k
k
k
k
==
−
−
⎧
⎨
⎪
⎪
⎩
⎪
⎪
−
−
−
−
∫
∫
∫
∫
ωξ ξ ξ ξ
ωξ ξ ξ
π
ξ
ξ
ξ
π
ξξ
ξ
ξ
()() ()
() ()
()
() ()
1
1
2
1
1
2
1
1
2
1
1
1
1
2
1
TT
n
n
jvj
j
n
μ
ξξ
()()=
⎧
⎨
⎪
⎪
⎩
⎪
⎪
=
∑
0
0
2
при
μ
≠ v,
при
μ
= v ≠ 0,
при
μ
= v = 0.
113
параметров. В таких случаях регрессионный анализ можно применить следующим
образом.
Рассмотрим процесс, описываемый выражением
ya axx ax
ax
ax
a
x
x
=+ + +
−
−
0112
3
22
44
55
2
3
1
2
3
1
l
. (5.149)
Для идентификации этого процесса введем сначала следующие новые
переменные:
ϕϕϕ
ϕϕ
112
3
3255
2
1
2
3
44
===
==
⎫
⎬
⎪
⎭
⎪
xx x x
x
x
x
,,,
,.
(5.150)
В итоге получаем
ya a a
a
a
a
=+ + +
−
−
01123
44
55
2
32
1
ϕϕ
ϕ
ϕ
ϕ
l
. (5.151)
Линеаризуем теперь уравнение (5.151) в предположении, что приращения
его переменных малы (см. приложение 1):
ΔΔ Δ Δ
ΔΔ
ya aa a
a
a
aa
a
aa
=− + +
+
−
+
−
−−
11 233 2 2 3
4
55
2
4
4545
55
23
5
32 32
11
ϕϕ ϕ ϕ
ϕ
ϕ
ϕϕ
ϕ
ϕ
ϕϕ
ll
()
.
(5.152)
Вводя обозначения
ba
11
=
, (5.153)
baa
a
2233
32
=−
−
ϕ
ϕ
l
, (5.154)
ba
a
32
32
=
−
ϕ
l
, (5.155)
b
a
a
4
4
55
2
1
=
−
ϕ
, (5.156)
()
b
aa
a
5
4545
55
2
3
1
=
−
ϕ
ϕ
ϕ
, (5.157)
получим
ΔΔΔΔΔΔ Δybbbbb b
jj
j
=++++=
=
∑
11 22 33 44 55
1
5
ϕϕϕϕϕ ϕ
. (5.158)
Очевидно, b
1
, b
2
, ..., b
5
могут быть идентифицированы методом линейной регрес-
сии, как и в разделе 5.8.
Из (5.157) имеем
b
a
a
a
a
5
4
55
2
545
55
2
1
1
=
−
⋅
−
ϕ
ϕ
ϕ
ϕ
. (5.159)
Соотношение (5.159) с учетом (5.156) примет вид
bb
a
a
54
545
55
2
1
=⋅
−
ϕ
ϕ
ϕ
или
a
b
bb
5
5
445 55
2
=
+
ϕϕ ϕ
. (5.160)

114
Из формулы (5.160) можно определить a
5
, поскольку
ϕ
4
и
ϕ
5
доступны для изме-
рения. Подставляя (5.160) в формулы (5.156) получаем a
4
. Член a
1
непосредствен-
но определяется величиной b
1
согласно соотношению (5.153). Члены a
2
, a
3
можно
найти из выражений (5.154), (5.155). Имеем
b
2
= - a
3
ϕ
3
b
3
. (5.161)
Из (5.161) определяем a
3
, так как переменная
ϕ
3
доступна для измерения. Наконец,
a
2
определяем подстановкой a
3
в выражение (5.155).
По аналогии с описанной выше методикой идентификации процесса (5.149)
может быть идентифицировано много других видов нелинейных зависимостей.
5.14. Линейные регрессии и метод наименьших квадратов
Запишем модель для описания линейной стационарной системы. Модель
системы представляет собой описание (некоторых из) ее свойств, предназначенное
для достижения некоторой цели. Задание системы с помощью конечного набора
численных характеристик или коэффициентов наиболее важно в плане идентифи-
кации модели системы. Достаточно часто определить эти коэффициенты априори
из знания физической природы системы
не удается. Вместо этого для определения
всех коэффициентов (или некоторой их части) приходится прибегать к процеду-
рам оценивания. Это означает, что рассматриваемые коэффициенты входят в мо-
дель системы как определяемые параметры. Будем обозначать эти параметры век-
тором
θ
.
Наиболее простое входо-выходное соответствие описывается линейным
разностным уравнением
yt ayt a yt n but b ut n et
na nb
ab
() ( ) ( ) ( ) ( ) ()+−++ −
=
−
+
+
−
+
11
11KK, (5.162)
где u(t) - сигнал на входе системы; y(t) - сигнал на выходе системы; e(t)- помеха
типа белого шума.
Поскольку в уравнение (5.162) белый шум e(t) входит как его непосредст-
венная ошибка, модель (5.162) часто называют моделью (структурой модели)
ошибки уравнения. В этом случае имеется следующий набор настраиваемых па-
раметров:
[]
θ
= aa a bb b
nn
T
ab
12 12
,, ,,,KK. (5.163)
Введем многочлены
Aq aq a q
n
n
a
a
()=+ ++
−−
1
1
1
K ,
Bq bq b q
n
n
b
b
()=++
−−
1
1
K .
Тогда уравнение (5.162) запишется в виде
yt Gq ut Hq et() ( , ) () ( , )()=
+
θ
θ
, (5.164)
где
Gq
Bq
Aq
(,)
()
()
θ
= , Hq
Aq
(,)
()
θ
=
1
. (5.165)
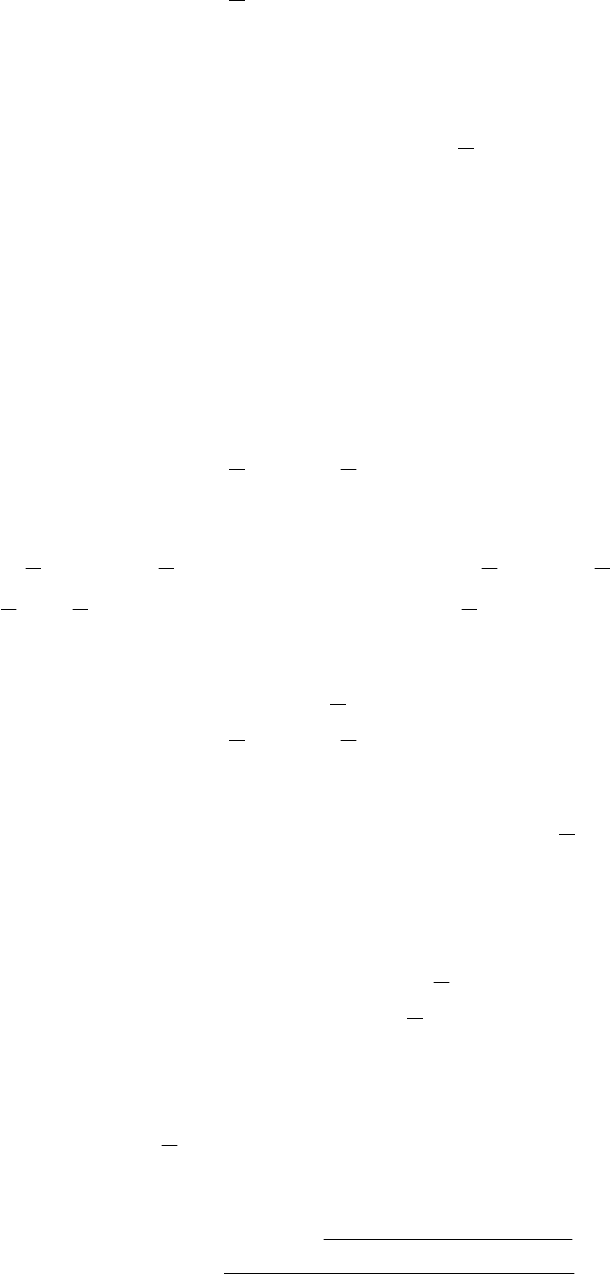
Будем называть модель (5.162) ARX - моделью, где сочетание AR относит-
ся к авторегрессионной части A(q)y(t), а символ X обозначает дополнительный
входной сигнал B(q)u(t). Другими словами, ARX есть авторегрессия с внешним
входным сигналом.
Диаграмма сигнальных потоков может быть представлена схемой рис.5.7.

115
B
A
1
A
uy
e
Рис. 5.7.
Одношаговый прогноз для описания (5.164) определяется соотношением [14 ]
$
(,) (,)() [ (,)]()y
t
HqGqut Hq yt
θ
θθ θ
⎛
⎝
⎜
⎞
⎠
⎟
=+−
−−11
1 . (5.166)
Рассчитаем предсказатель для модели (5.162). Подстановка (5.165) в (5.166)
дает:
$
( ) () [ ( )] ()y
t
Bqut Aq yt
θ
⎛
⎝
⎜
⎞
⎠
⎟
=+−1
. (5.167)
Введем вектор
ϕ
() [ ( ), , ( ), ( ), , ( )]t yt yt n ut ut n
ab
T
=− − − − − −11KK. (5.168)
Тогда (5.167) можно переписать в виде
$
() ()y
t
tt
TT
θ
θϕ ϕ θ
⎛
⎝
⎜
⎞
⎠
⎟
==. (5.169)
Предсказатель представляет собой скалярное произведение известного вектора
данных
ϕ
(t) и вектора параметров
θ
. В статистике такую модель называют линей-
ной регрессией, а вектор
ϕ
(t) - регрессионным вектором.
В том случае, когда некоторые из коэффициентов многочленов A и B из-
вестны, мы приходим к линейной регрессии вида
$
() ()y
t
tt
T
θ
ϕθμ
⎛
⎝
⎜
⎞
⎠
⎟
=+, (5.170)
где член
μ
(t) известен. Далее для простоты обозначений, полагаем
μ
(t) = 0, что со-
вершенно допустимо.
С учетом (5.170) ошибка предсказания принимает вид
εθ ϕ θ
(, ) () ()tyt t
T
=− . (5.171)
Критерий наименьших квадратов для линейной регрессии (5.170) имеет
вид:
VZ
N
yt t
N
NT
t
N
( , ) [ () () ]
θϕθ
=−
=
∑
11
2
2
1
, (5.172)
где
z
N
= (y(1), u(1), y(2), u(2), ..., y(N),u(N)). (5.173)
Оценка
$
θ
N
LS
вектора параметров
θ
по методу наименьших квадратов имеет вид:
$
arg min ( , ) ( ) ( ) ( ) ( )
θθϕϕϕ
N
LS
N
NT
t
N
t
N
VZ
N
tt
N
tyt==
⎡
⎣
⎢
⎤
⎦
⎥
⋅
=
−
=
∑∑
11
1
1
1
, (5.174)
где argmin f(x)- значение x, минимизирующее функцию f(x). Следовательно, argmin
V
N
(
θ
,Z
N
) есть значение вектора
θ
, минимизирующее функцию V
N
(
θ
,Z
N
).
116
5.15. Взвешенный метод наименьших квадратов
В критерии наименьших квадратов (5.172) различным измерениям могут
быть назначены различные веса:
VZ
N
yt t
N
N
t
T
t
N
(, ) [() ()]
θαϕθ
=−
=
∑
1
2
1
(5.175)
или
VZ Ntyt t
N
NT
t
N
(, ) ( ,)[() ()]
θβ ϕθ
=−
=
∑
2
1
, (5.176)
где
β
(N, t)- весовая функция, зависящая от N. Здесь N - аргумент весовой функции
β
(N, t).
Оценка
$
θ
N
LS
вектора параметров
θ
в этом случае принимает вид
$
( ,) () () ( ,) () ()
θβϕϕ βϕ
N
LS T
t
N
t
N
Nt t t Nt tyt=
⎡
⎣
⎢
⎤
⎦
⎥
⋅
=
−
=
∑∑
1
1
1
. (5.177)
5.16. Многомерный случай метода наименьших квадратов
Если выходная переменная y(t) является p-мерным вектором, то критерий
наименьших квадратов принимает вид
VZ
N
yt t yt t
N
NTTT
t
N
( , ) [ () () ] [ () () ]
θϕθϕθ
=−∧−
−
=
∑
11
2
1
1
, (5.178)
где ∧ - симметричная положительно полуопределенная матрица размера (p
xp), ко-
торая устанавливает веса относительной важности компонент вектора
εθ ϕ θ
(, ) () ()tyt t
T
=− .
Оценка
$
θ
N
LS
вектора параметров
θ
в этом случае принимает вид
$
() () () ()
θϕϕ ϕ
N
LS T
t
N
t
N
N
tt
N
tyt=∧
⎡
⎣
⎢
⎤
⎦
⎥
⋅∧
−
=
−
−
=
∑∑
11
1
1
1
1
1
. (5.179)
5.17. Рекуррентный алгоритм наименьших квадратов
В разделе (5.15) вычислялась оценка, минимизирующая взвешенный кри-
терий наименьших квадратов.
$
arg min ( , )[ ( ) ( ) ]
θβϕθ
θ
t
T
k
t
tk yk k=−
=
∑
2
1
. (5.180)
Она задается соотношением (5.177):
$
() ()
θ
t
R tft=
−1
, (5.181)
117
Rt tk k k
T
k
t
() (, ) ( ) ( )=
=
∑
βϕϕ
1
, (5.182)
ft tk kyk
k
t
() (, ) ( ) ( )=
=
∑
βϕ
1
. (5.183)
Чтобы произвести вычисления по формулам (5.181)-(5.183), следовало бы в
момент времени t образовать матрицу
Rt()и вектор f(t) по данным
Zyuyu ytut
t
= [ (), (), ( ), ( ), , () ()]11 2 2K и затем найти
$
θ
t
по формуле (5.181). Из соот-
ношений (5.181)-(5.183) ясно, что
$
θ
t
и
$
θ
t −1
взаимосвязаны. Попытаемся использо-
вать эту взаимосвязь.
Допустим, что последовательность весов имеет следующие свойства:
β
(t,k) =
λ
(t)
β
(t-1,k), 1 ≤ k ≤ t-1,
β
(t,t) = 1. (5.184)
Это означает, что можно записать
βλ
(, ) ( )tk j
k
t
=
+
∏
1
. (5.185)
Заметим, однако, что при этом
Rt tRt t t
T
() () ( ) () ()=−+
λϕϕ
1 , (5.186)
ft tft tyt() () ( ) () ()=
−
+
λ
ϕ
1
. (5.187)
Отсюда
$
() () ()[ () ( ) () ()] ()[ () ( )
$
() ()]
()[ () () ()]
$
() ()
$
() ()[ () ()
$
].
θλϕλθϕ
ϕϕ θ ϕ θ ϕ ϕ θ
t t
T
tt
T
t
Rtft Rt tft tyt Rt tRt tyt
RtRt t t tyt Rt tyt t
== −+= −+=
=− +=+ −
−− −
−
−
−−
−
−
11 1
1
1
11
1
1
11
Имеем
$$
() ()[ () ()
$
]
θθ ϕ ϕ θ
tt
T
t
Rt tyt t=+ −
−
−
−1
1
1
, (5.188)
Rt tRt t t
T
() () ( ) () ()=−+
λϕϕ
1 , (5.189)
что и представляет собой рекуррентный алгоритм наименьших квадратов. Этот
алгоритм удовлетворяет требованию: в момент времени t-1 запоминается только
конечномерный информационный вектор
xt Rt
t
()[
$
,( )]−= −
−
11
1
θ
.
5.18. Вариант алгоритма с рекуррентным обращением матрицы
Чтобы избежать обращения матрицы
Rt()на каждом шаге, удобно ввести
Pt R t() ()=
−1
и применить к (5.189) лемму об обращении матриц
[] [ ]ABCD A ABDABC DA+=− +
−−− − −−111 1 11
. (5.190)
Выбирая
AtRt=−
λ
() ( )1, BD t
T
==
ϕ
()и С = 1, получим
Pt
Pt
Pt t t Pt
ttPtt
t
T
T
()
()
( ) () () ( )
() () ( ) ()
()
=
−−
−−
+−
1
11
1
ϕϕ
λϕ ϕ
λ
. (5.191)
Более того, имеем

118
Rt t
t
Pt t
t
Pt t t Pt t
ttPtt
Pt t
ttPtt
T
T
T
−
=−−⋅
−−
+−
=
=
−
+−
1
1
1
11 1
1
1
1
() ()
()
()()
()
( ) () () ( ) ()
() () ( ) ()
()()
() () ( ) ()
.
ϕ
λ
ϕ
λ
ϕϕ ϕ
λϕ ϕ
ϕ
λϕ ϕ
Таким образом, приходим к следующему варианту алгоритма:
$
()
$
()()[() ()
$
()]
θθ ϕθ
tt Ltyt tt
T
=−+ − −1 1 , (5.192)
Lt
Pt t
ttPtt
T
()
()()
() () ( ) ()
=
−
+−
1
1
ϕ
λϕ ϕ
, (5.193)
Pt
Pt
Pt t t Pt
ttPtt
t
T
T
()
()
( ) () () ( )
() () ( ) ()
()
=
−−
−−
+−
⎡
⎣
⎢
⎤
⎦
⎥
1
11
1
ϕϕ
λϕ ϕ
λ
. (5.194)
Здесь мы перешли к обозначению
$
()
θ
t
вместо
$
θ
t
, чтобы подчеркнуть определен-
ное их различие из-за влияния начальных условий.
Рассмотрим теперь многомерный случай взвешенных наименьших квадра-
тов
$
argmin (,)[() ()] [() ()]
θ β ϕθ ϕθ
θ
t
TT
k
T
k
t
tk yk k yk k=−∧−
−
=
∑
1
2
1
1
, (5.195)
где
β
(t, k) удовлетворяет (5.184). Проводя вычисления, полностью аналогичные
сделанным ранее, получаем многомерный вариант соотношений (5.192)-(5.194)
$
()
$
()()[() ()
$
()]
θθ ϕθ
tt Ltyt tt
T
=−+ − −1 1 , (5.196)
[]
Lt Pt t t t Pt t
t
T
() ( ) () () () ( ) ()=− ∧+ −
−
11
1
ϕλ ϕ ϕ
, (5.197)
[]
{}
Pt
t
Pt Pt t t t Pt t t Pt
t
TT
()
()
( ) ( ) () () () ( ) () () ( )=−−− ∧+− −
−
1
11 1 1
1
λ
ϕλ ϕ ϕ ϕ
. (5.198)
5.19. Метод инструментальных переменных
5.19.1.Инструментальные переменные
Предположим, что данные в действительности описываются соотношением
yt t v t
T
() () ()=+
ϕθ
00
(5.199)
для некоторой последовательности {v
0
(t)} случайных величин. Можно мыслить
θ
0
как «истинное значение» вектора параметров.
В типичных случаях оценка МНК
$
θ
N
не будет стремиться к
θ
0
из-за корре-

119
ляции между v
0
(t) и
ϕ
(t). Попробуем тогда применить общий корреляционный век-
тор
ξ
(t) к линейной регрессии. Будем называть такое применение методом инст-
рументальных переменных. Компоненты вектора
ξ
называют при этом инструмен-
тальными переменными. Отсюда
$
() () () ()
θξϕ ξ
N
IV T
t
N
t
N
N
tt
N
tyt=
⎡
⎣
⎢
⎤
⎦
⎥
⋅
=
−
=
∑∑
11
1
1
1
(5.200)
при условии, что указанные обратные матрицы существуют. Для успешного при-
менения (5.200) к системе (5.199) нужно потребовать выполнения следующих
свойств инструментальной переменной
ξ
:
Et t
T
[() ()]
ξϕ
- невырожденная матрица, (5.201)
Etvt[() ()]
ξ
0
0
=
, (5.202)
где E[x] - математическое ожидание случайного вектора x. Другими словами, ин-
струментальные переменные должны коррелировать с регрессионными перемен-
ными, но не должны коррелировать с шумом v
0
(t).
5.19.2.Выбор инструментальных переменных
Предположим, что линейная регрессионная модель является ARX-
моделью:
yt ayt a yt n but b ut n vt
na nb
ab
() ( ) ( ) ( ) ( ) ()+−++ −
=
−
+
+
−
+
11
11KK. (5.203)
Допустим также, что истинное описание (5.199) соответствует (5.203) с «нулевы-
ми» индексами у коэффициентов. Естественная идея состоит в генерации инстру-
ментальных переменных аналогично (5.203) так, чтобы обеспечить (5.201), но в
тоже время не позволить им быть зависимыми с {v
0
(t)}. Это приводит к
[]
ξ
() ( ) ( ) ( ) ( ) ( ) ( )t Kq xt xt xt n ut ut n
ab
T
=−−−−−− − −12 1KK
, (5.204)
где K - линейный фильтр, а x(t) порождается входной последовательностью, про-
пущенной через линейную систему:
N(q)x(t) = M(q)u(t) . (5.205)
Здесь
Nq nq n q
Mq m mq m q
n
n
n
n
n
n
m
m
() ,
() .
=+ ++
=+ ++
−−
−−
1
1
1
01
1
K
K
(5.206)
Большинство используемых на практике инструментальных переменных форми-
руются таким способом.
5.19.3.Рекуррентный метод инструментальных переменных
Оценка для фиксированных (не зависящих от модели) инструментальных
переменных определяется выражением (5.200). Вводя веса аналогично (5.181)-
(5.183), получим
$
() ()
θ
t
IV
R tft=
−1
, (5.207)
где
120
Rt tk k k
ft tk kyk
T
k
t
k
t
() (, ) ( ) ( ),
() (, ) ( ) ( ).
=
=
=
=
∑
∑
βξϕ
βξ
1
1
(5.208)
Эти соотношения тесно связаны с (5.181)-(5.183), поэтому рекуррентное вычисле-
ние
$
θ
t
IV
полностью аналогично вычислению
$
θ
t
LS
. Вместо (5.192)-(5.194) получаем
[
]
$
()
$
( ) () () ()
$
()
θθ ϕθ
tt Ltyt tt
T
=−+ − −1 1 , (5.209)
Lt
Pt t
ttPtt
T
()
()()
() () ( ) ()
=
−
+−
1
1
ξ
λϕ ξ
, (5.210)
Pt
Pt
Pt t t Pt
ttPtt
t
T
T
()
()
( ) () () ( )
() () ( ) ()
()
=
−−
−−
+−
⎡
⎣
⎢
⎤
⎦
⎥
1
11
1
ξϕ
λϕ ξ
λ
. (5.211)
Библиографический список
1.
Качмаж С., Штейнгауз Г. Теория ортогональных рядов. –М.: Физматгиз,1958.
2.
Трахтман А.М. Введение в обобщенную спектральную теорию сигналов. –М.:
Совет. радио, 1972.
3.
Проектирование специализированных информационно-вычислительных сис-
тем / Под ред. Ю.М.Смирнова. –М.: Высшая школа, 1984.
4.
Голд Б., Рейдер Ч.. Цифровая обработка сигналов. –М.: Совет. радио, 1973.