Durst F. Fluid Mechanics: An Introduction to the Theory of Fluid Flows
Подождите немного. Документ загружается.

156 6 Hydrostatics and Aerostatics
This relationship expresses that the sum of the “pressure energy” P/ρ and
the potential energy (gx
2
= −g
j
x
j
) is constant at each point of a fluid at
rest. As all points of different fluid elements possess the same “total energy”,
the driving energy gradient for motion is absent. Hence also from the energy
point of view the condition for hydrostatic fluid behavior exists.
When a fluid with a height h has a free surface on which an equally dis-
tributed pressure P
0
acts at all points, it represents, because of the relation
P = f (x
2
), a plane x
2
= h constant, i.e. a horizontal plane.
For the pressure distribution, one obtains with the boundary condition
P = P
0
for x
2
= h ; C = P
0
+ ρgh
P = P
0
+ ρg(h − x
2
)0≤ x
2
≤ h (6.13)
This relationship expresses the known hydrostatic law, according to which
the pressure in a liquid at rest increases in a linear way with the depth below
the free surface.
When one rewrites equation (6.13), one obtains:
P
0
ρ
+ gh =
P
ρ
+ gx
2
= constant (6.14)
The laws of hydrostatics are often applicable also to fluids in moving
containers when one treats these in “accelerated reference systems”. The
externally imposed accelerative forces are then to be introduced as inertia
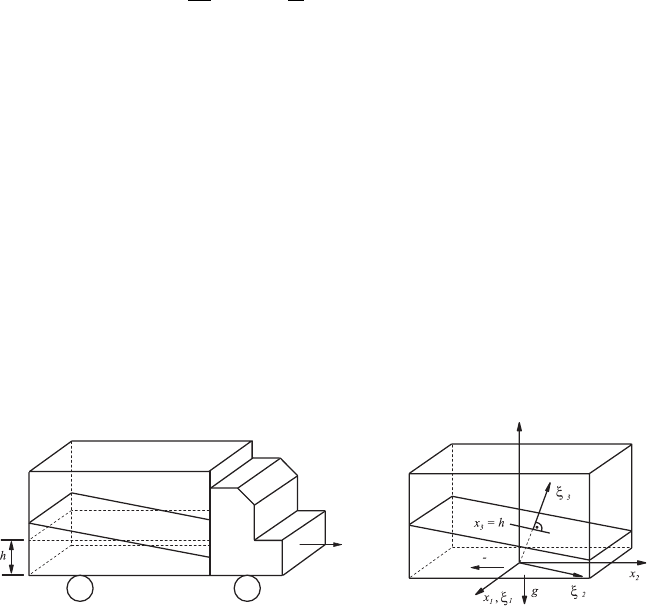
forces. Figure 6.3 shows as an example, a “container lorry” filled with a fluid
whichisatrestatthetimet<t
0
; it then increases its speed linearly for all
times t ≥ t
0
, i.e. the fluid experiences a constant acceleration.
In a state of rest or in non-accelerating motion, the fluid surface in the
container forms a horizontal level. When the container experiences a con-
stant acceleration b, the fluid surface will adopt a new equilibrium position,
provided that one disregards the initially occurring “swishing motions”.
When one now wants to compute the new position of the fluid surface,
the introduction of a coordinate system x
i
is recommended which is closely
connected with the container. For this coordinate system, the hydrostatic
equations read as follows:
b
b
Fig. 6.3 Position of the fluid level under constant acceleration
6.1 Hydrostatics 157
∂P
∂x
1
=0;
∂P
∂x
2
= −ρb;
∂P
∂x
3
= −ρg (6.15)
From this, the general solution results:
∂P
∂x
1
=0 p = f
1
(x
2
,x
3
) (6.16a)
∂P
∂x
2
= −ρb P = −ρbx
2
+ f
2
(x
1
,x
3
) (6.16b)
∂P
∂x
3
= −ρg P = −ρgx
3
+ f
3
(x
1
,x
2
) (6.16c)
By comparing the solutions, one obtains that f
1
, f
2
, f
3
can only be the
sum of the terms obtained by partial integration plus a constant:
P = C − ρ(bx
2
+ gx
3
) (6.17)
Along the free surface of the fluid the pressure P = P
0
exists and thus the
equation of the plane in which the free surface lies reads
x
3
= −
b
g
x
2
+
1
gρ
(C − P
0
)for−∞ <x
1
< +∞ (6.18)
The integration constant C is determined by the condition that the fluid
volume before and after the onset of the acceleration is the same. Therefore,
the same volume holds for the moving fluid and the fluid at rest:
C = gρh + P
0
(6.19)
Hence the equation for the plane of the free surface reads
x
3
= h −
b
g
x
2
for −∞ <x
1
< +∞ (6.20)
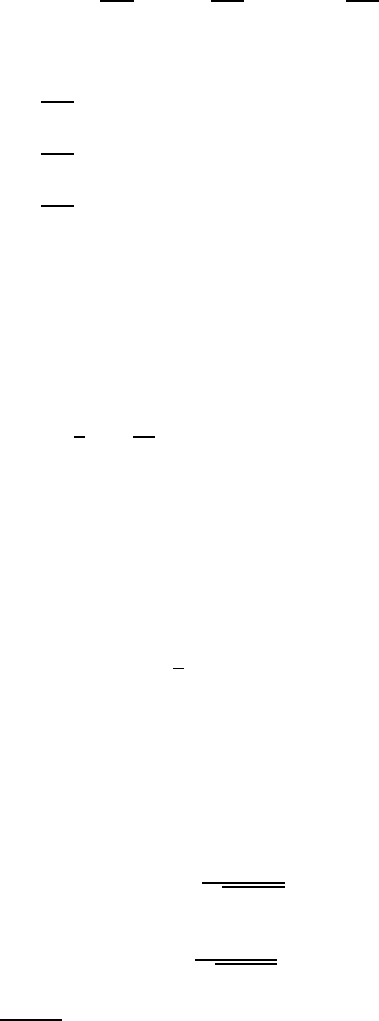
As the solution of the problem has to be independent of the chosen co-
ordinate system, a coordinate system ξ
i
can be introduced which is rotated
against the system x
i
in such a way that the following equations for the
coordinate transformations hold:
ξ
1
= x
1
(axis of rotation)
ξ
2
=
1
b
2
+ g
2
(gx
2
+ bx
3
) (6.21)
and
ξ
3
=
1
b
2
+ g
2
(−bx
2
+ gx
3
)
This is equivalent to the introduction of a resulting acceleration of the quan-
tity
b
2
+ g
2
in the direction ξ
3
. Hence the basic hydrostatic equations
read
158 6 Hydrostatics and Aerostatics
∂P
∂ξ
1
=0;
∂P
∂ξ
2
=0;
∂P
∂ξ
3
= −
b
2
+ g
2
ρ (6.22)
Thus P = F (ξ
3
) holds and P = C − ρ
b
2
+ g
2
ξ
3
.
The integration constant C results from the boundary condition
P = P
0
+ gρh for ξ
3
= 0 (6.23)
P = P
0
+ ρg
⎛
⎝
h −
$
1+
b
g
2
ξ
3
⎞
⎠
(6.24)
All further statements concerning the problem of the accelerated fluid con-
tainer can also be made in the coordinate system ξ
i
. Along the free surface
P = P
0
and
ξ
3
=
h
$
1+
b
g
2
= constant (6.25)
Hence this is the equation of the plane in which the free surface of the fluid
in the moving container lies.
By the above treatment, it becomes clear that it is possible to employ
the basic hydrostatic laws also in accelerated reference systems, provided the
inertia forces that are attributable to the external motions are taken into
consideration. The accelerations that occur (inertial and gravitational) are
to be added in a vectorial manner to yield a total acceleration. Through this
one obtains the direction and magnitude of the total acceleration. The free
surface occurs perpendicular to the vector of the total acceleration.
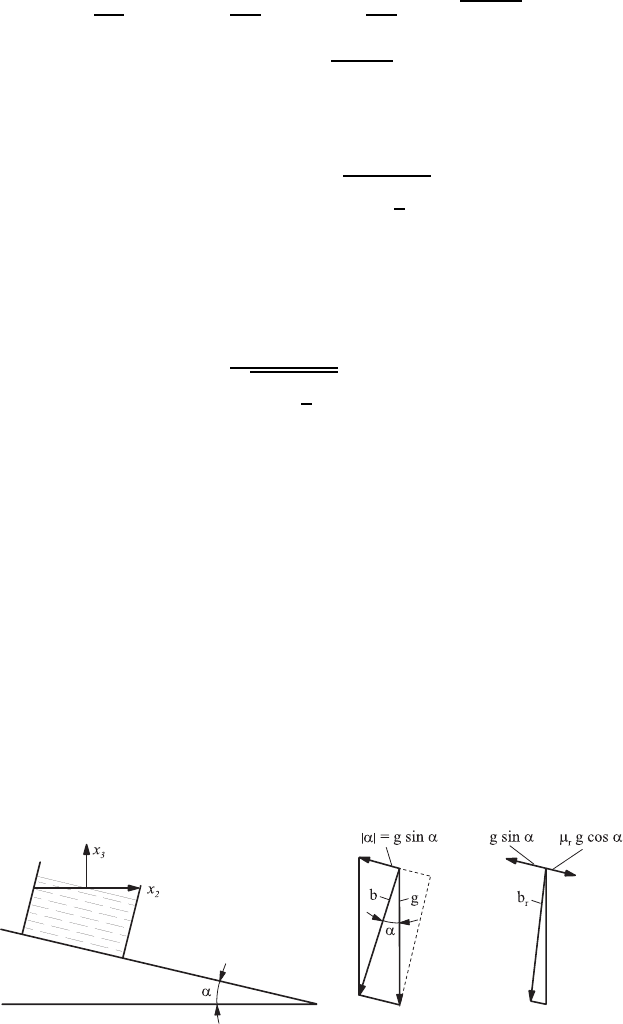
The example given in Fig. 6.4 can also be categorized into the group of
examples that can be treated by means of the basic laws of hydrostatics. This
figure shows a water container which is sliding down an inclined plane with
an angle of inclination α with respect to the horizontal plane. The container
at rest possesses a water surface which is horizontal, as only the gravitational
Fig. 6.4 Water container sliding down an inclined plane. Motion with and without
friction
6.1 Hydrostatics 159
acceleration appears as inertia force per kg of fluid. When the fluid container
is released and when the acceleration directed downwards is |b| = g sin α,the
body starts to move and thus experiences an acceleration which is parallel
to the inclined plane. The resulting acceleration component acting on the
fluid is composed of the component directed upwards with |b| = g sin α and
the component directed downwards with µ
r
g cos α.Hereµ
r
is the friction
coefficient which characterizes the interaction between the container bottom
and the surface of the inclined plane.
When one treats first the accelerated motion occurring downwards on
the inclined plane without friction, one obtains in the coordinate system,
indicated in Fig. 6.4, the following set of basic hydrostatic equations:
∂P
∂x
1
= 0 (6.26a)
∂P
∂x
2
= −ρg sin α cos α (6.26b)
∂P
∂x
3
= −ρg(1 − sin
2
α) (6.26c)
The pressure distribution in the container sliding downwards in Fig. 6.4 and
thus also the solution for the position of the fluid surface can be obtained by
the solution of (6.26).
From
∂P
∂x
1
= 0, it follows on the one hand that P = f(x
2
,x
3
) and thus
the following solution holds:
∂P
∂x
2
= −
1
2
ρg sin(2α) −→ P = f
1
(x
3
) −
1
2
ρg sin(2α)x
2
(6.27a)
and also the solution
∂P
∂x
3
= −ρg cos
2
α −→ P = f
2
(x
2
) − ρg(cos
2
α)x
3
(6.27b)
By comparing the solutions, one obtains:
P = C −
1
2
ρg(sin(2α)x
2
+2(cos
2
α)x
3
) (6.28)
Along the free surface, P = P
0
holds and thus one obtains as the relationship
for the location of the free surface:
x
3
= −(tan α)x
2
+
1
ρg cos
2
α
(C − P
0
)for−∞ <x
1
< +∞ (6.29)
As the origin of the coordinates also lies on the free surface, C = P
0
follows
and thus for the plane in which the free surface lies one obtains
x
3
= −(tan α)x
2
for −∞ <x
1
< +∞ (6.30)
160 6 Hydrostatics and Aerostatics
This equation shows that for a friction-free sliding along the inclined plane,
the free surface lies parallel to the plane along which the container slides.
This can also be derived from considerations of the left-hand acceleration
diagram in Fig. 6.4, in which it can be seen that the resulting acceleration b
is located vertically with respect to the inclined plane.
When one adds for the downward motion the occurring frictional force,
one obtains the following set of basic hydrostatic equations:
∂P
∂x
1
= 0 (6.31a)
∂P
∂x
2
= −ρg(sin α − µ
r
cos α)cosα (6.31b)
∂P
∂x
3
= −ρg[1 − (sin α − µ
r
cos α)sinα] (6.31c)
Thus the solution corresponding to (6.31) reads:
P = C − ρg[(sin α − µ
r
cos α)cosα]x
2
− ρg[1 − (sin α − µ
r
cos α)sinα]x
3
(6.32)
If one puts on the one hand P = P
0
, for the free surface, one obtains the
equation for the plane in which the free surface lies. When one takes further
into consideration that the origin of the coordinates lies again on the free
surface, i.e. C = P
0
, one obtains as the final equation for the plane of the
free fluid surface
x
3
= −
(sin α − µ
r
cos α)cosα
1 − (sin α − µ
r
cos α)sinα
x
2
(6.33)
For this general case of motion with friction along the inclined plane of the
fluid container, shown in Fig. 6.4, a free liquid surface appears which is less
inclined with respect to the horizontal plane without surface friction. Atten-
tion has to be paid, however, to the fact that the derivations only hold when
µ
r
≤ tan α.Forµ
r
≥ tan α one obtains the limiting case of a container at
rest, i.e. the frictional force is higher than the forward accelerating force.
As a last example to show the employment of hydrostatic laws in accel-
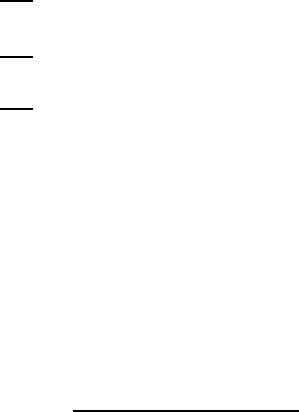
erated reference systems, the problem presented in Fig. 6.5 is considered. It
shows a rotating cylinder closed at the top and bottom, which is partly filled
with a liquid. When the cylinder is at rest, the free surface of this liquid as-
sumes a horizontal position, as the different liquid particles only experience
the gravitational force as mass force. When the cylinder is put into rotation,
one observes a deformation of the liquid surface which progresses until finally
it becomes parabolic, as shown in Fig. 6.5.
When now on this rotating motion an additional accelerated vertical mo-
tion is superimposed, one detects that the hyperboloid can assume different
shapes, depending on the magnitude of the vertical acceleration and on the
direction (upwards or downwards). In the following it will be shown that the
6.1 Hydrostatics 161
Fig. 6.5 Treatment of the “fluid flows” in a
rotating vertically moved and partly filled cylinder
issue of the shape of the hyperboloid can be answered on the basis of the ba-
sic equations of hydrostatics. For this purpose, a coordinate system is chosen
which is firmly coupled to the walls of the rotating and vertically accelerated
cylinder and which thus experiences both rotating motion and accelerated
vertical motion.
The above examples have shown that the basic hydrostatic equations are
applicable, provided that no fluid motion occurs in the chosen coordinate
system and that the external acceleration forces are taken into consideration
as inertia forces. In the acceleration diagram in Fig. 6.5, it is shown that, for
the following derivations, the horizontally occurring centrifugal acceleration
ω
2
r, as well as the “vertical acceleration” b, have been taken into account.
If one considers the fluid flow problem sketched in Fig. 6.5, in a coordinate
system (r, ϕ, z), rotating with the cylinder, one finds that all fluid particles are
at rest after having reached the steady final state of motion. With reference
to the chosen coordinate system, the prerequisites for the employment of the
basic hydrostatic equation are fulfilled, which in cylindrical coordinates adopt
the following form:
∂P
∂r
= ρg
r
;
1
r
∂P
∂ϕ
= ρg
ϕ
;
∂P
∂z
= ρg
z
(6.34)
For g
r
= rω
2
, g
ϕ
=0andg
z
= −(g + b) one obtains, for the problem to be
treated, the following set of basic equations and their general solution:
∂P
∂r
= ρrω
2
−→ P =
1
2
ρω
2
r
2
+ f
1
(ϕ, z) (6.35a)

162 6 Hydrostatics and Aerostatics
1
r
∂P
∂ϕ
=0 −→ P = f
2
(r, z) (6.35b)
∂P
∂z
= −ρ(g + b) −→ P = −ρ(g + b)z + f
3
(r, ϕ) (6.35c)
Comparison of the solutions (6.35a–c) results in:
P = C +
ρ
2
ω
2
r
2
− ρ(g + b)z for 0 ≤ ϕ ≤ 2π (6.36)
When one introduces on the axis r = 0, for the position of the parabolic apex
z = z
0
, P = P
0
holds at the location r =0andz = z
0
. This yields for the
integration constant:
C = P
0
+ ρ(g + b)z
0
Therefore, the equation for the pressure distribution in the liquid body in
Fig. 6.5 reads:
P = P
0
+
ρ
2
ω
2
r
2
− ρ(g + b)(z − z
0
)for0<ϕ<2π (6.37)
Along the free surface of the liquid, the following holds for the pressure P =
P
0
, so that the free surface employing (6.37) can be represented as follows:
z = z
0
+
ω
2
2(g + b)
r
2
for 0 ≤ ϕ ≤ 2π (6.38)
The coordinate z
0
of the introduced apex position can be determined from
the condition that the liquid volume before the rotations starts, i.e. πR
2
h,
has to be equal to the liquid volume which exists in rotation between the free
surface of the liquid and the cylinder walls. Thus the following holds:
πR
2
h =2π
#
R
0
rz dr =2π
#
R
0
r
z
0
+
ω
2
2(g + b)
r
2
dr (6.39)
and carrying out the integration yields:
1
2
R
2
h =
1
2
z
0
r
2
+
ω
2
8(g + b)
r
4
R
0
=
1
2
R
2
z
0
+
ω
2
4(g + b)
R
2
(6.40)
z
0
= h −
ω
2
4(g + b)
R
2
(6.41)
Inserting (6.41) in (6.38) yields:
z = h −
ω
2
4(g + b)
(R
2
− 2r
2
) (6.42)
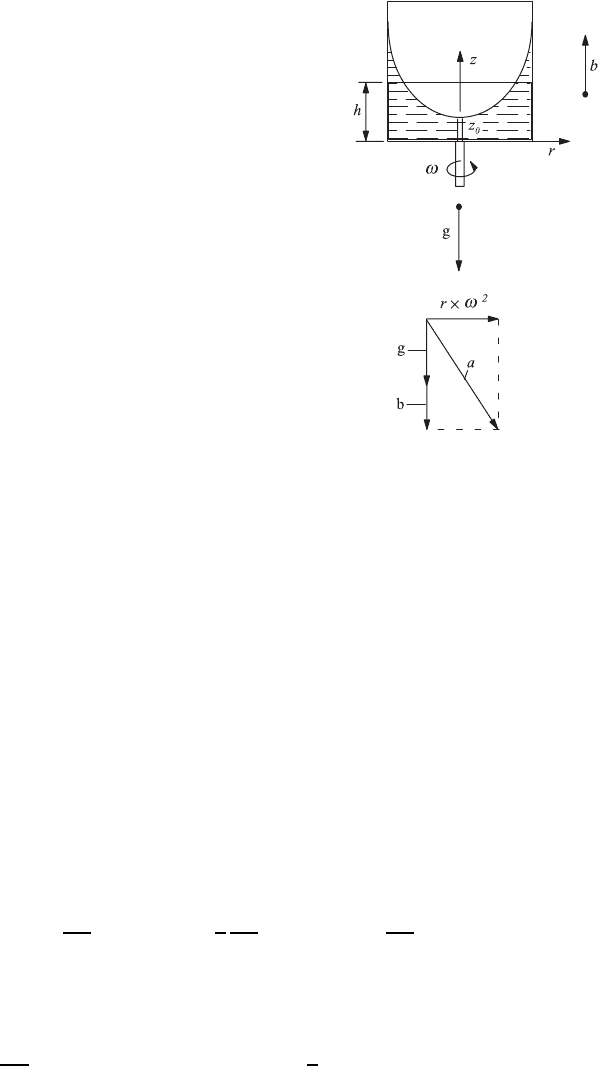
On the basis of this, the different forms of the free liquid surface can now be
looked at. Some typical cases are shown in Fig. 6.6. These will be discussed
6.2 Connected Containers and Pressure-Measuring Instruments 163
Fig. 6.6 Examples of possible forms of the fluid surface in a rotating vertically
accelerated cylinder
in the following on the basis of the above derivations and the derived final
relationship. It is hoped that it will be clear to the reader how physical
information can be obtained by analytical derivations employing the basic
equations of fluid mechanics, e.g. in the present example the form of the free
surface of the liquids in the containers can be calculated.
The positions of the liquid surface indicated in Fig. 6.6 can be stated by
the indicated relationship of the relative magnitudes of b and g:
b>−g: When the vertical acceleration of the container takes place up-
wards and the resultant acceleration b points downwards, with
0 >b>−g, the “opening” of the parabola is positive according
to (6.42). The liquid touches the bottom and side areas of the
container.
b = −g: When the vertical acceleration of the container takes place up-
wards with b = −g, the entire fluid rests at the side wall of the
container.
b<−g: When the vertical acceleration of the container takes place down-
wards with b<−g, the “opening” of the parabola is negative
according to (6.42). The fluid touches the ceiling and side areas
of the container.
All this can be deduced from (6.42) and all intermediate forms, not shown
in Fig. 6.6 can also be completed.
6.2 Connected Containers and
Pressure-Measuring Instruments
6.2.1 Communicating Containers
In many fields of engineering one has to deal with fluid systems that are
connected to one another by pipelines. Special systems are those in which
164 6 Hydrostatics and Aerostatics
∇
∇
Container 1
Container
2
P
01
P
02
P
1
P
1
Valve
H
2
h
2
H
1
h
1
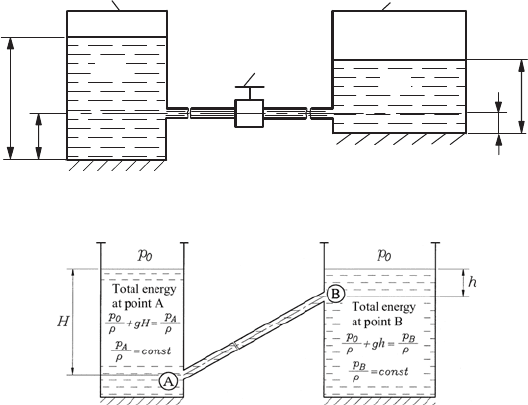
Fig. 6.7 Sketch for explanation of the pressure conditions with communicating
containers
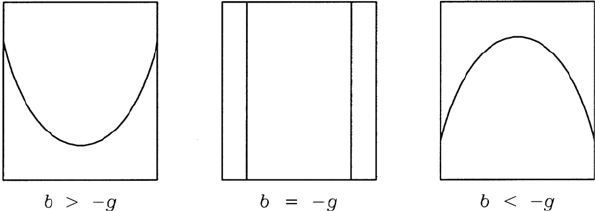
Fig. 6.8 Communicating containers with inclined communication tube
the fluid is at rest, i.e. in which the fluid does not flow. Figure 6.7 represents
schematically such a system, which consists of two containers with “fluids at
rest” that are connected with one another by a pipeline with a valve.
When the valve is opened, both systems can interact with one another in
such a way that a flow takes place from the container with higher pressure,
at the entrance of the pipe connecting the containers, with lower pressure.
When the flow through the pipe has stopped, the same fluid pressure exists
on both sides of the valve, i.e.
p
01
+ ρ
1
g (H
1
− h
1
)=p
02
+ ρ
2
g (H
2
− h
2
) (6.43)
When there is the same fluid in both containers with ρ
1
= ρ
2
= ρ the
following relationship holds:
p
02
− p
01
= ρg [(H
1
− H
2
) − (h
2
− h
1
)] (6.44)
For the containers shown in Fig. 6.8, the pressure P
0
acts on both of the top
surfaces.
Hence, introducing that the pressure over both of the free surfaces is equal,
one obtains
p
02
= p
01
= p
0
(6.45)
and thus
(H
1
− h
1
)=(H
2
− h
2
) (6.46)
i.e. in open communicating containers filled with the same fluid, the fluid
levels take the same height with respect to a horizontal plane.

6.2 Connected Containers and Pressure-Measuring Instruments 165
This is the basic principle according to which simple liquid level indicators
which are installed outside liquid containers operate. They consist of a vertical
tube connected with a container in which the liquid filled in the container
can rise. The fluid level indicated in the connecting tube shows the fluid level
in the container.
As a last example, open containers are considered that are connected to
one another by means of an inclined tube that is directed upwards. For these
containers, one finds that the fluid surfaces in both containers adopt the
same level. When this final state is reached (equilibrium state), no equalizing
flow takes place between the containers, although the deeper lying end of
the pipe shows a higher hydrostatic pressure at the connecting point. The
reasons for the fact that an equalizing flow does not occur, in spite of a
higher hydrostatic pressure at the deeper lying end of the pipe were stated
in Sect. 6.1. The energy considerations carried out there show that the total
energies of the fluid particles are the same at both ends of the pipe and thus
the basic prerequisite for the start of fluid flows is missing.
The behavior of communicating containers that are filled with fluids at rest
can often be understood easily by making it clear to oneself that the pressure
influence of a fluid on walls is identical at each point with the pressure influ-
ence on fluid elements which one installs instead of walls. For example, the
pressure distributions in the fluid container shown in Fig. 6.9 are identical
with those of the same container when components are installed to obtain
two partial containers connected with one another, in the case that the fluid
surfaces are kept at the same level.
Owing to the installed walls, the pressure conditions do not change in
the right container as compared with the left container. The container areas
installed on the left replace the pressure influence of the fluid particles acting
on the walls.
Fig. 6.9 Sketch for the consideration of the pressure influence on liquids at rest