Czichos H., Saito T., Smith L.E. (Eds.) Handbook of Metrology and Testing
Подождите немного. Документ загружается.


1118 Part E Modeling and Simulation Methods
and magnetic polarization of a magnet, upon various
external conditions such as temperature, pressure and
magnetic field, instead of the detailed trajectories of
individual particles. The statistical mechanics is such
a disciplinary, which reveals simple rules governing
systems of huge numbers of components. In many inter-
esting cases, unfortunately, statistical mechanics cannot
provide a final compact expression for the desired phys-
ical quantities because of the many-body effect of the
interactions among components, although the bare in-
teraction is two-body. Many approximate theories have
been developed which make the field called condensed
matter physics very rich. With the huge leaping of
power of computers, the Monte Carlo approach based
on the principle of statistical mechanics has been de-
veloped in the recent decades. This chapter is devoted
to introducing the basic notions for the Monte Carlo
method [22.1], with several examples of application.
22.1.1 Boltzmann Weight
According to the principle of statistical mechanics, the
probability for a particular microscopic state appearing
in an equilibrium system attached to a heat reservoir
with temperature T is given by the Boltzmann weight
p
i
= e
−βE
i
/
i
e
−βE
i
≡ e
−βE
i
/Z , (22.1)
where β =1/k
B
T, E
i
the energy of the system at the
particular state, and Z the partition function. The ex-
pectation value of any physical quantity, such as the
magnetic polarization of a magnet, can be evaluated by
O=
1
Z
i
O
i
e
−βE
i
. (22.2)
The difficulty one meets in applications is: there are too
many possible states such that it is practically unable
to compute the partition function and the expectation
values for desired physical quantities.
22.1.2 Monte Carlo Technique
The Monte Carlo techniques overcome this difficulty by
choosing a subset of possible states, and approximate
the expectation value of a physical quantity by the av-
erage within the subset of states of limited number. The
way for picking up the subset of states can be speci-
fied by ourselves, and is very crucial to the accuracy
of the estimation thus made. A successful Monte Carlo
simulation thus relies heavily on the way of sampling.
Importance Sampling
One can regard the statistical expectation value as a time
average over the states a system passes through the
course of a measurement. This suggests that we can
take a sample of the states of the system such that
the possibility of any particular state being chosen is
proportional to its Boltzmann weight. This importance
sampling method is the simplest and most widely-used
in Monte Carlo approaches. It is easy to see that the esti-
mation for the desired expectation value is given simply
by
O
M
=
M
i=1
O
i
/M , (22.3)
since the Boltzmann weight has been already involved
into the process of sampling. This estimation is much
more accurate than a simple sampling process, espe-
cially at low temperatures where the system spends the
large portion of time in several states with low energies.
The implementation of the above importance sam-
pling is achieved by Markov processes. A Markov
process for Monte Carlo simulation generates a Markov
chain of states: starting from the state a, it indicates
a new one b, and upon inputting b it points the third one
c, and so on. A certain number of the states at the head
of these Markov chains are dropped, since they depend
on initial state a. However, after running a sufficiently
long time, the picked states should obey the Boltzmann
distribution. This goal is guaranteed by the ergodicity
property and the condition of detailed balance.
Ergodicity
This property requires that any state of the system can
be reached via the Markov process from any other state
supposing we run it sufficiently long. The importance
of this condition is very clear since otherwise the miss-
ing states will have zero weight in our simulation which
is not the case in reality. It is noticed that one still has
room to set the direct transition probability from one
state to many others to zero, as usually done in many
algorithms.
Detailed Balance
This condition is slightly subtle and requires some con-
sideration. For the desired distribution vector p, with the
components of the vector being the Boltzmann weight
for each state, suppose we find an appropriate Markov
process characterized by a set of transition probabilities
among possible states such that
j
p
i
P(i → j) =
j
p
j
P( j →i) , (22.4)
Part E 22.1

Monte Carlo Simulation 22.1 Fundamentals of the Monte Carlo Method 1119
where p
i
is the probability of the state i and P(i → j)
the transition probability from i-state to j-state. The
above condition is necessary since the desired distribu-
tion, namely the Boltzmann distribution, is the one for
equilibrium state. However, the Markov process satis-
fying the above condition does not necessarily generate
the desired distribution, even when the Markov chain is
run long enough. Actually, it is possible that a dynamic
limit cycle is realized as
p
(t +n) = P
n
p
(t) (22.5)
with n > 1, so that the desired distribution p can never
be reached. In order to avoid this situation, we set the
detailed balance condition
p
i
P(i → j) = p
j
P( j →i) . (22.6)
It is easy to see that this condition eliminates the possi-
bility of limit cycles. Then from the Perron–Frobenuius
theorem, it can be shown that the desired distribution p
is the only one that can be generated by the transition
matrix P.
To be short, a Markov process satisfying the condi-
tions (i) the ergodicity condition, (ii)
i
P(i → j) =1,
and (iii)
P(i → j)/P( j → i) = p
j
/p
i
= e
−β(E
j
−E
i
)
,
(22.7)
will generate the Boltzmann distribution at equilibrium.
Acceptance Ratio
There is still freedom when composing the transition
probabilities. One can take a selection probability g and
the acceptance ratio A such that
P(i → j) = g(i → j)A(i → j) . (22.8)
For simplicity, one usually takes the constant selection
probability for all possible states during the one-step
transition. As for the acceptance ratio, we can take them
as large as possible provided they satisfy the condition
(22.7), which makes the Markov chain move more effi-
ciently around the sampling space. It is easy to see that
the acceptance ratio is given by
A(i → j) =
e
−β(E
j
−E
i
)
, for E
j
−E
i
> 0 ;
1, otherwise .
(22.9)
This is the Metropolis algorithm [22.2].
With the selection probability and the acceptance
ratio determined, a Monte Carlo simulation goes like
the following: from a given initial state we pick up
a candidate for the next state out of the possible ones
according to the selection probability; then we check
if the candidate state is to be accepted according to
the probability specified by the acceptance ratio. This
routine is repeated for sufficiently long time before we
insert a measurement step where we calculate physical
quantities for the realized state.
It is then clear that the Markov chain of states thus
generated is stochastic, which is the most important
feature of the Monte Carlo techniques in comparison
with other deterministic methods such as molecular dy-
namics. The rules which specify a particular simulation
algorithm govern the distribution of the realized states
when a large number of states are piled up.
22.1.3 Random Numbers
The stochastic property of Monte Carlo simulations
comes in because one chooses a new state from the old
one in a random fashion. This process is realized by ran-
dom numbers. Therefore, generation of a sequence of
random numbers is of crucial importance for accurate
Monte Carlo simulations. Of course, as long as such
a sequence is generated by a deterministic procedure
written in a computer code, it cannot be really random.
It is usually called quasi random provided it satisfies the
following two conditions characteristic to true random
numbers.
Condition I: The period of the quasi random numbers
should be longer than the total length of simulations.
Condition II: The quasi random numbers should be
k-dimensional equidistributed with large enough k.In
other words, all possible sets consisting of k sequential
numbers appear with the same frequency in a period,
except the one of k zeros.
Classical Random Number Generators
The linear congruential sequence is given by
x
i+1
=ax
i
+b mod 2
w
, i =0, 1,... , (22.10)
where w stands for the number of bits of random num-
bers x
i
,anda and b are suitable sets of numbers which
maximizes the period of the quasi random numbers to
2
w
. The merit of this sequence is its simplicity. How-
ever, it has several shortcomings. First, the period is not
sufficiently long even with w =31. Second, a random
number is determined only by the previous one, and
there exists strong correlation among sequential num-
bers. Third, the multiple operation is time consuming.
Part E 22.1

1120 Part E Modeling and Simulation Methods
These shortcomings are overcome by the general-
ized feedback shift register (GFSR)
x
i+n
=x
i+m
⊕x
i
, i = 0, 1,... , (22.11)
where ⊕ denotes the exclusive- or logical operation.
The two integers n and m are chosen so that t
n
+t
m
+1
is an nth order primitive polynomial of t. When the ini-
tial seeds x
0
, x
1
,...,x
n−1
are prepared appropriately,
the period of this sequence is 2
n
−1. This period is
due to the independence of each bit. Since each step
only includes one logical operation, this algorithm is
very fast. However, statistical properties of this fam-
ily of random numbers is still not very satisfactory, as
shown by large-scale Monte Carlo simulations of the
two-dimensional Ising model [22.3] for which an exact
solution is available.
Advanced Generators
In order to increase the period of the sequence of quasi
random numbers, the twisted GFSR (TGFSR) has been
introduced [22.4,5]
x
i+n
=x
i+m
⊕x
i
A, i =0, 1,... , (22.12)
where A is a w ×w sparse matrix
A =
⎛
⎜
⎜
⎜
⎜
⎜
⎜
⎝
1
.
.
.
1
1
a
w−1
a
w−2
··· a
1
a
0
⎞
⎟
⎟
⎟
⎟
⎟
⎟
⎠
. (22.13)
Here a
w−1
,...,a
0
take 1 or 0 so that ϕ
A
(t
n
+t
m
)is
primitive with ϕ
A
(t) the characteristic polynomial of A.
This operation mixes the information of all bits, and
the period of each bit increases up to 2
nw
−1. In order
to accomplish the equidistribution property, tempering
operations consisting of certain bitshift and bitmask
logical operations are introduced in each step. Based
on these two operations the so-called TT800 algorithm
with w =32, n = 25 and m = 7 exhibits the period
2
800
−1 and 25-dimensional equidistribution.
A further improved generator known as the
Mersenne Twister is proposed [22.6]
x
i+n
=x
i+m
⊕
x
u
i
|x
l
i+1
A, i = 0, 1,... , (22.14)
where the matrix A is determined similarly to the
TGFSR. The key point is to use the incomplete array,
with
x
u
i
|x
l
i+1
standing for the operation to combine
the upper (w −r) bits of x
i
and the lower r bits
of x
i+1
. This operation drops the information of the
lower r bits of x
0
, and consequently the period is re-
duced from 2
nw
−1to2
p
−1, with p =nw −r.On
the other hand, if the period can be chosen as a prime
number, there exists an algorithm which evaluates the
characteristic polynomial ϕ
A
(t) with O(p
2
) compu-
tations. Then, the period can be extended thanks to
the r degrees of freedom. Taking w =32, n = 624,
m = 397 and r =31 results in a Mersenne prime num-
ber p =19 937, namely the MT19937 algorithm has
the period 2
19 937
−1 and 623-dimensional equidistri-
bution. Owing to such an astronomical period and good
statistical property on a rigorous mathematical basis,
this algorithm is now becoming the standard quasi
random number generator both in academic and com-
mercial uses [22.7].
22.1.4 Finite-Size Effects
In the thermodynamic limit, many physical quantities
diverge at the phase transition. Although all of them
take finite values in a finite system, diverging properties
can be evaluated from the scaling behavior of a series of
finite-size systems.
First-Order Phase Transition
In a first-order phase transition, divergence of physi-
cal quantities at the transition temperature is δ-function
like in the thermodynamic limit. The size dependence
of the divergent quantity and the transition temperature
in finite systems should be
Q(L, T
c
(L)) = Q
0
+C
1
L
d
, (22.15)
T
c
(L) =T
c
(∞) +C
1
L
−d
+···, (22.16)
Note that the constant term Q
0
is continuous from
outside the transition regime, and thus is important
physically as the divergent term.
Second-Order Phase Transition
In a second-order phase transition, physical quantities
diverge in a wide range around the critical temperature
in the thermodynamic limit as
Q(T) ∼
|
T −T
c
|
−ϕ
, (22.17)
where ϕ is the critical exponent of quantity Q. A typical
example is the susceptibility of a ferromagnet. Correla-
tions between order parameters develop in the following
Part E 22.1
Monte Carlo Simulation 22.2 Improved Algorithms 1121
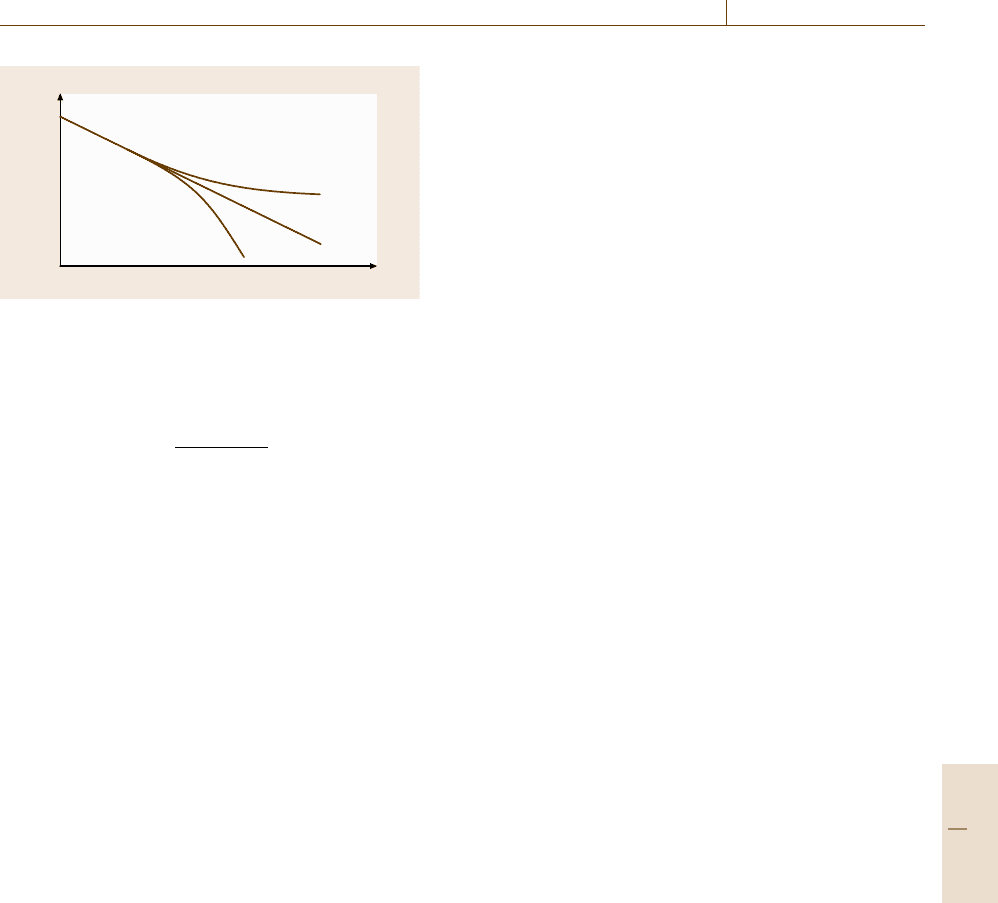
log m
log t
(a) (b)
(c)
Fig. 22.1 Schematic figure of nonequilibrium relaxation of
order parameter from a fully polarized configuration for (a)
T > T
c
,(b) T = T
c
and (c) T < T
c
way
m
i
m
j
−m
i
2
∼
e
−|i−j|/ξ
|i − j|
d−2+η
, (22.18)
ξ ∼|T −T
c
|
−ν
, (22.19)
where m
i
stands for the order parameter at position i,
and ν and η are the critical exponents for the correlation
length and critical correlation function. While the criti-
cal temperature T
c
depends on details of systems such as
lattice structures, the critical exponents are not changed
by such details, a property known as the universality of
critical phenomena.
In a finite system, phase transition is supposed to
take place at the temperature where a correlated clus-
ter becomes as large as the system size, namely ξ ∼ L.
Finite-size scaling theory claims that physical quanti-
ties around the critical temperature can be expressed as
a function of L/ξ in the following fashion
Q(L, T ) ∼ L
ϕ/ν
f
sc
L
1/ν
(T −T
c
)
, (22.20)
where f
sc
(x) is a scaling function.
Several statements can be derived from the finite-
size scaling form (22.20): (1) At T = T
c
, this form
is reduced to Q(L, T
c
) ∼ L
ϕ/ν
, which stands for the
power-law size dependence at the critical temperature.
(2) When L
−ϕ/ν
Q(L, T) is plotted versus L
1/ν
(T −
T
c
), the curves for different L should collapse to each
other in the vicinity of T
c
provided T
c
, ν and ϕ are
known. Alternatively, one can use this so-called finite-
size scaling plot to evaluate the critical point and critical
exponents.
22.1.5 Nonequilibrium Relaxation Method
As discussed above, measurement of physical quanti-
ties should be made after equilibration of the system.
However, the relaxation process also contains valuable
information of equilibrium state, such as the transition
point and critical exponents. As an example, we con-
sider the magnetic polarization of a ferromagnet, which
presuming nonvanishing value only below the transi-
tion temperature as m(T) ∼(T
c
−T)
β
. If one starts from
a fully polarized configuration, the order parameter m
decays exponentially to zero as MC update proceeds
for T > T
c
; it converges to a finite value for T < T
c
,as
showninFig.22.1. The dynamical scaling form [22.8,9]
in the thermodynamic limit is given by
m(T ;t) ∼t
−β/(zν)
F
sc
t
1/(zν)
(T −T
c
)
, (22.21)
where z is the dynamical critical exponent. At T = T
c
,
(22.21) reduces to
m(T
c
;t) ∼t
−β/(zν)
. (22.22)
Therefore, it is possible to evaluate the critical
temperature T
c
and a combination of critical ex-
ponents β/(zν) [22.10–13]. Another combination of
critical exponents 1/(zν) is evaluated from the “finite-
time” scaling of (22.21). Extensions to quantum sys-
tems [22.14–16] and Kosterlitz–Thouless [22.17]and
first-order [22.18] phase transitions are possible.
22.2 Improved Algorithms
The conventional Monte Carlo algorithm explained
above suffers from the problem of slow relaxation
in cases such as nucleation process in first-order
phase transitions, critical slowing down in the vicinity
of second-order phase transitions, and complex free-
energy landscape of random and/or frustrated systems.
Several improved algorithms are proposed and shown
to be very efficient. Readers can refer to [22.19]for
a well-written review.
22.2.1 Reweighting Algorithms
Suppose the number of states between E and E + dE
is given by D(E)dE with the density of states (DOS)
Part E 22.2
1122 Part E Modeling and Simulation Methods
D(E), the probability for the system presuming energy
E is P(E, T) ∼ D(E)e
−βE
, known as the canonical
distribution. If the canonical distribution at a tempera-
ture β
0
is given, that at β is obtained by the reweighting
formula [22.20]
P(E;T) =
e
−(β−β
0
)E
P(E;T
0
)
e
−(β−β
0
)ε
P(ε;T
0
)dε
. (22.23)
Since the histogram P(E;T
0
) has a sharp peak around
the averaged energy of the system at T
0
, P(E;T) can be
evaluated from P(E;T
0
) with small enough statistical
errors only if T is close enough to T
0
. This limitation
can be overcome by taking data for several temperatures
around the target one [22.21,22].
The essential point of the histogram method is to no-
tice that the probability distribution used in simulations
can be different from that used for evaluating thermal
averages of physical quantities, namely the Boltz-
mann distribution. In the multicanonical method [22.23,
24], the simulated probability distribution is taken as
P(E;T) ≈1/E
0
(T), where E
0
(T ) stands for the range
of the energy covered in simulations at temperature T.
The reason that the multicanonical simulation works ef-
ficiently can be seen taking the example of a first-order
phase transition. Since the canonical distribution has
a sharp peak around the equilibrium energy, nucleation
processes governed by the two free-energy minima with
finite separation results in slow relaxation. This diffi-
culty is overcome by the broad energy range covered by
the multicanonical weight.
Since the DOS D(E) is not known a priori, it should
be evaluated in preliminary runs, and the approximate
DOS D
0
(E;T) is utilized in simulations. The probabil-
ity distribution
P
MC
(E;T) = D
−1
0
(E;T )D(E)/E
0
(T) (22.24)
does not have to be completely flat, and the reweighting
formula is given by
P(E;T) =
e
−βE
D
0
(E;T)P
MC
(E;T)
e
−βε
D
0
(ε;T )P
MC
(ε;T)dε
. (22.25)
From a practical point of view, construction of the
flat histogram (or precise estimation of the DOS)isthe
crucial point of the multicanonical method, and vari-
ous algorithms have been proposed [22.25–30] after the
original one. In all these algorithms, the DOS is eval-
uated by accumulating the entry number of a random
walk in the energy space. As the system size increases,
the deviation of the DOS grows exponentially, and the
estimation within limited preliminary runs by simple
accumulation becomes difficult.
In order to overcome this difficulty, a new algo-
rithm [22.31, 32] was proposed based on a “biased”
random walk in the energy space
0. Set i =0, D(E) ≡1andn = 1.
1. Select a site at random and measure the initial en-
ergy E
b
.
2. Choose a Monte Carlo move to the state with en-
ergy E
a
by the transition probability p(E
b
→ E
a
)
=min[D(E
b
)/D(E
a
), 1].
3. Update the DOS at the energy of the chosen state as
D(E) → D(E) f
i
, with a modification factor f
i
> 1.
4. If n < N,setn → n +1 and go to step 1.
5. If n = N,set f
i
→ f
i+1
(< f
i
), i → i +1, n = 1,
rescale the DOS andgotostep1.
6. Continue this process until f
i
→1.
The essential point of this algorithm is the intro-
duction of the modification factor f
i
.When f
0
and N
aretakensothat f
N
0
is comparable to the total num-
ber of states, the deviation of the DOS is reproduced in
the early stage of the iteration. Of course, f
i
> 1 means
that the detailed balance condition is not satisfied (in
this sense this algorithm does not belong to Monte Carlo
ones), and the DOS during the iteration has a systematic
discrepancy from the equilibrium one. The true DOS is
obtained at the final stage of the iteration, where f
i
=1
eventually holds.
The reweighting algorithm discussed above has
a bonus that some physical quantities not available in
conventional Monte Carlo algorithm can be treated by
this method. For example, the energy dependence of
the free-energy landscape can be evaluated [22.33, 34],
which is suitable for the analysis of the first-order phase
transition.
22.2.2 Cluster Algorithm and Extensions
In the vicinity of the critical temperature T
c
of a se-
cond-order phase transition, the correlation time τ of
a physical quantity Q defined in
Q(t
0
)Q(t
0
+t)∼e
−t/τ
, (22.26)
diverges as τ ∼ (T −T
c
)
−zν
, where z is a dynamical
critical exponent. The critical slowing down makes
computer simulations around the critical point very time
consuming. In order to overcome this difficulty, the
cluster algorithm (Swendsen–Wang (SW) algorithm)
was proposed [22.35].
Part E 22.2
Monte Carlo Simulation 22.2 Improved Algorithms 1123
Here we explain this algorithm using the Ising
model
−βH = K
i, j
σ
i
σ
j
,σ
i
=±1 . (22.27)
First, we consider the Hamiltonian H
l,m
in which the
interaction between sites l and m are removed. Then,
we define the conditional partition functions Z
P
l,m
and
Z
AP
l,m
for σ
l
σ
m
=+1and−1by
Z
P
l,m
=Tr
σ
e
−βH
l,m
δ
σ
l
σ
m
,1
, (22.28)
Z
AP
l,m
=Tr
σ
e
−βH
l,m
δ
σ
l
σ
m
,−1
. (22.29)
The partition function is expressed as
Z =Tr
σ
e
−βH
= e
K
Z
P
l,m
+ e
−K
Z
AP
l,m
. (22.30)
Using
Z
l,m
=Tr
σ
e
−βH
l,m
= Z
P
l,m
+Z
AP
l,m
, (22.31)
we can rewrite (22.29)as
Z = e
K
1− e
−2K
Z
P
l,m
+ e
−2K
Z
l,m
. (22.32)
This expression can be interpreted as: “If the spins at
sites l and m are parallel, create a bond with the proba-
bility p =1− e
−2K
.” When this procedure is repeated
for all nearest-neighbor pairs of spins, each spin is as-
signed to one of the clusters. The system is now mapped
on a percolation problem with N
c
clusters [22.36,37]
Z =Tr p
b
(1 − p)
n
2
N
c
, (22.33)
where b is the number of bonds and n is the number of
interactions which do not form bonds, and the trace is
taken for all possible configurations of clusters. In each
Monte Carlo step, we assign a new Ising variable for
each cluster independently. This nonlocal update using
percolation clusters reduces significantly the relaxation
time.
It was then proposed [22.38] that one can flip a sin-
gle cluster in one step which is grown from a randomly
chosen site. This process improves the efficiency of the
SW cluster algorithm [22.39].
The algorithm discussed above can be applied to the
Heisenberg model [22.38]
−βH = K
ij
S
i
·S
j
, S
2
i
=1 , (22.34)
using an operator R(r) with respect to a randomly cho-
sen unit vector r in the spin space
R(r)S = S−2(S·r)r ,
(22.35)
and a spin cluster is formed in the procedure: “If the
spins at sites l and m satisfies M ≡ (S
l
·r)(S
m
·r) > 0,
create a bond with the probability p =1 − e
−2KM
.”
This rule is a natural extension of the SW algorithm in
the Ising model (22.27), and r is updated in each Monte
Carlo step. A similar extension has been made to the
six-vertex model [22.40]. Since this model is a classical
counterpart of the quantum Heisenberg model, this ex-
tension enabled the cluster-update version of quantum
Monte Carlo simulations, as will be discussed later.
Further developments of the cluster algorithm took
place in connection with percolation theories. The in-
vaded cluster algorithm [22.41,42] which automatically
tunes physical parameters to the critical point is a typ-
ical example. It turns out that a simple algorithm to
tune the probability p directly until critical percolation
is observed [22.43] works better.
Another important progress is the worm algo-
rithm [22.44], which enables accelerated dynamics as
fast as the cluster update within the local update.
Although this algorithm is based on the closed-path
configurations appearing in high-temperature expan-
sions, it shares the fundamental concept with the cluster
algorithm, namely Monte Carlo simulations in alter-
native representations of original systems. Since this
algorithm exhibits its merits more clearly in quantum
Monte Carlo simulations, it will be explained later in
this chapter.
22.2.3 Hybrid Monte Carlo Method
As far as the ergodicity and detailed balance condi-
tion are satisfied, any kind of update process can be
adopted in a certain Monte Carlo algorithm. Then, it
is interesting to hybridize Monte Carlo and molecular
dynamics (MD) simulations. Since MD process corre-
sponds to a forced particle move on an equal-energy
surface, it is expected to be effective in frustrated sys-
tems at low temperatures. An implementation in this
direction is formulated for the Heisenberg spin glass
model [22.45,46]
H =
ij
J
ij
S
i
·S
j
, S
2
i
=1 , (22.36)
with the equation of motion
dS
i
dt
= S
i
× H
i
, H
i
=
∂H
∂S
i
=
j
J
ij
S
j
. (22.37)
The MD treatment for all spins is inserted in each Monte
Carlo step for certain time intervals.
Part E 22.2
1124 Part E Modeling and Simulation Methods
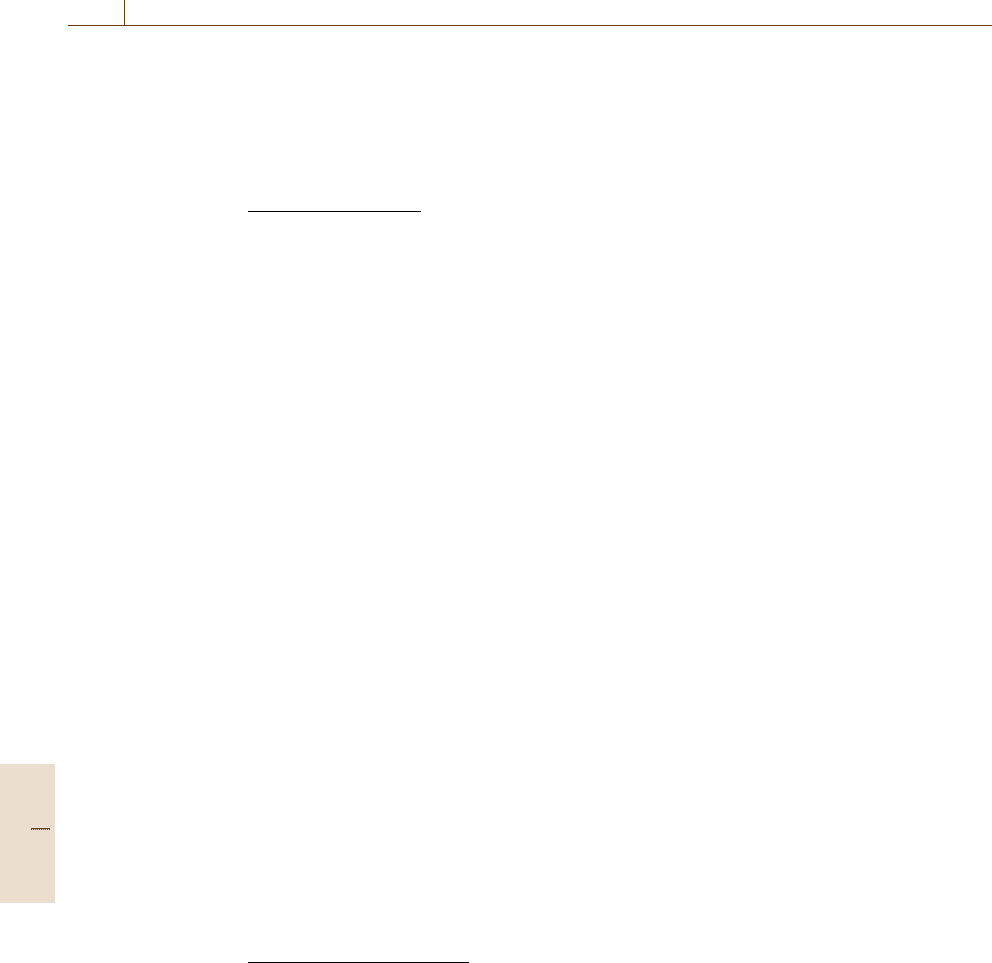
22.2.4 Simulated Annealing
and Extensions
In complex free-energy landscapes of random and/or
frustrated systems as shown in Fig. 22.2, conven-
tional Monte Carlo algorithms result in trapping to
a metastable state. Applications of the multicanoni-
cal and cluster algorithms brought some progress but
the results were not so satisfactory, since for exam-
ple frustrations suppress the formation of large clusters.
One therefore needs special treatments for this class of
problems.
F
q
Fig. 22.2 Schematic figure of a complex free-energy land-
scape
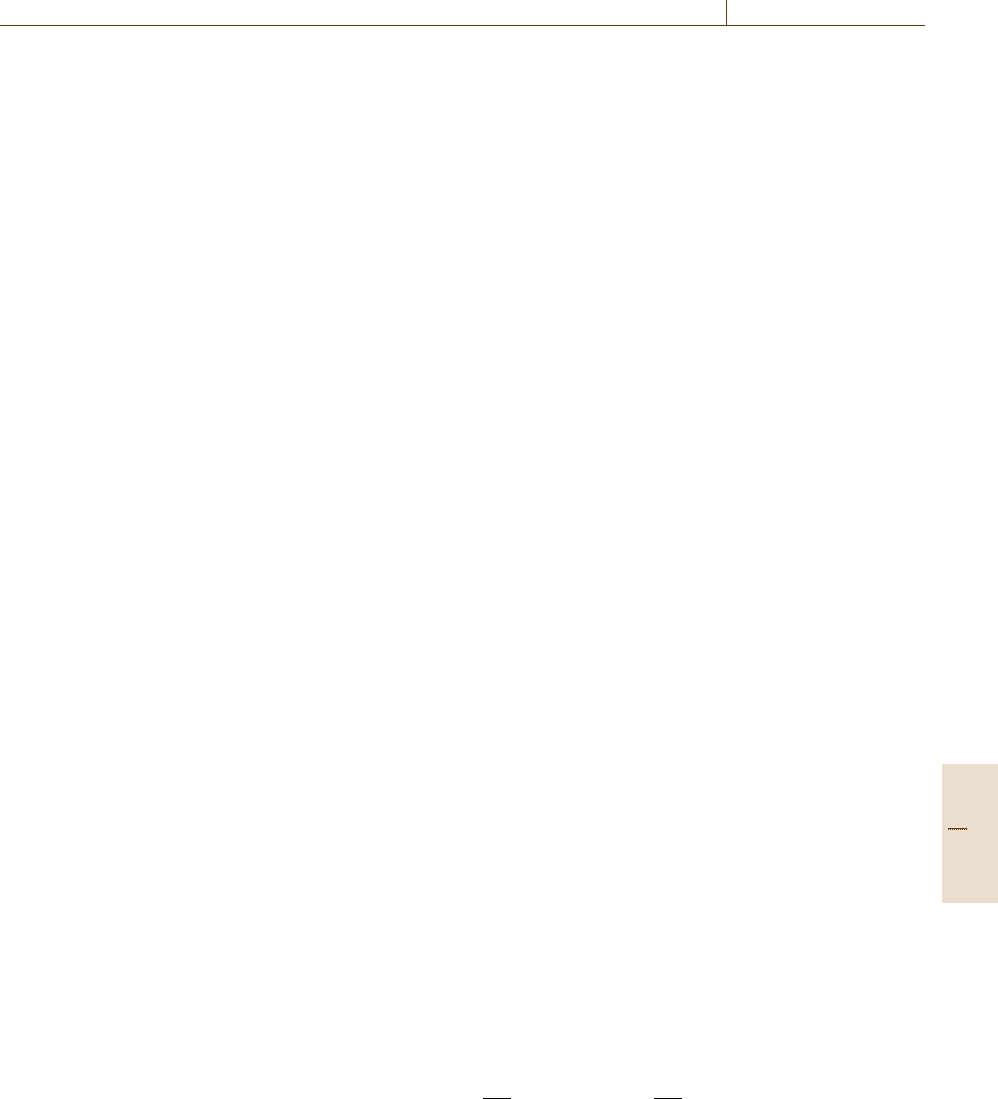
F
q
Fig. 22.3 Deep valleys of the free-energy landscape at
low temperatures (at the bottom) can be bypassed with
high-temperature configurations (upper ones correspond to
higher temperatures)
The simulated annealing [22.47] was originally pro-
posed for optimization problems, namely searching the
state which minimizes a cost function. The cost func-
tion can be taken as the energy of a physical system.
One can then introduce an auxiliary temperature,and
define a free energy at finite temperatures. The benefit is
that one can then search the global energy minimum via
some passes activated naturally by finite temperatures.
The simulation is started from a high temperature, and
the system is cooled down gradually.
Simulated Tempering
In the simulated tempering [22.48, 49] the inverse tem-
perature β is treated as a dynamical variable, such that
both the cooling and heating processes are implemented
in the algorithm. The reason this algorithm works well
is explained in Fig. 22.3. The probability distribution of
the original system
P(x) =
e
−βH(x)
Z(β)
, Z(β) =
x
e
−βH(x)
, (22.38)
is extended to a larger parameter space of x and {β
m
}
(m = 1, 2,...,M)as
P(x,β
m
) =
e
−β
m
H(x)
Z(β
m
)
˜
π
m
, (22.39)
˜
π
m
∝exp
g
m
+log Z(β
m
)
,
m
˜
π
m
=1 . (22.40)
One choice of the function g
m
is g
m
=−log Z(β
m
),
which results in
˜
π
m
= 1/M. That is, all β
m
are visited
equally.
Choosing several discrete inverse temperatures can
make the simulation efficient, and the optimal number
and distribution of {β
m
}are estimated as follows [22.49,
50]. First, the acceptance ratio of the flip between dif-
ferent temperatures is given by
exp
−(β
m
H(x
m
)−β
m+1
H(x
m+1
))
≈exp
−(Δβ)
2
dH/ dβ
=exp
−(Δβ)
2
NC/β
2
m
,
where N and C are the number of particles and the
specific heat, respectively. In order to keep the accep-
tance ratio independent of the system size, Δβ ∼ N
−1/2
or M ∼ N
1/2
should be satisfied. If C diverges at the
critical temperature, one should take M ∼ N
[1+α/(dν)]/2
,
with the critical exponent α of C and the space dimen-
sion d.
Next, each β
m
is determined iteratively in prelimi-
nary runs. A new set {β
m
} is constructed from the old
Part E 22.2

Monte Carlo Simulation 22.2 Improved Algorithms 1125
set {β
m
} as
β
1
=β
1
, (22.41)
β
m
=β
m−1
+(β
m
−β
m−1
)
p
m
c
(m = 2,...,M) , (22.42)
c =
1
M −1
M
m=2
p
m
, (22.43)
with β
1
<β
2
< ···<β
M
. The acceptance ratio p
m
at
β
m
is also evaluated during preliminary runs. The above
procedure arrives at equilibrium when all values of {p
m
}
become equal, which is consistent with the initial choice
of g
m
.
Monte Carlo simulations are performed using the
above sets of {β
m
} and {g
m
}.Sinceg
m
only depends
on β
m
, update without changing β
m
is the same as
the standard one, and the weight for update of β
m
is
proportional to e
−β
m
H+g
m
. Measurements on physical
quantities are made similarly to the conventional Monte
Carlo algorithm at each β
m
.
Exchange Monte Carlo
Instead of treating one system as in the simulated
tempering, the exchange Monte Carlo method [22.50]
takes M replicated systems at β
m
(m = 1, 2,...,M),
and exchanges the configurations between replicas of
close temperatures. The optimal distribution of β
m
is
evaluated similarly to that in the simulated temper-
ing as given in (22.41)–(22.43). Update in a replica
is the same as the conventional one, and exchange of
replicas at β
m
and β
m+1
is introduced by comparison
of the weights exp
−β
m
H(x
m
) −β
m+1
H(x
m+1
)
and
exp
−β
m
H(x
m+1
) −β
m+1
H(x
m
)
. This algorithm can
be regarded as a parallelized version of the simulated
tempering, and is often called parallel tempering.
This algorithm has several advantages compared
with the simulated tempering. First, it is unnecessary to
introduce the nontrivial function g
m
. Since determina-
tion of g
m
(or equivalently Z(β
m
)) is complicated and
time consuming, this property simplifies the coding and
accelerates simulations. Second, existence of fixed sets
of β
m
throughout simulations is suitable for observing
the replica overlap, which is important in the study of
spin glasses. Third, this algorithm fits very well with
parallel coding. Most calculations can be done inde-
pendently in each replica (i. e., in each CPU), and only
information on exchange rates and temperatures have to
be sent to other CPUs.
22.2.5 Replica Monte Carlo
The replica Monte Carlo [22.51] implemented for spin
glass models can be regarded as a mixture of the ex-
change Monte Carlo and the cluster algorithm. Consider
the Ising spin glass model
H =−
ij
β J
ij
σ
i
σ
j
, (22.44)
and take M replicas. The pair Hamiltonian of two close
temperatures is defined as (for simplicity, m = 1)
H
pair
(σ
1
,σ
2
) =−
ij
β
1
J
ij
σ
1
i
σ
1
j
+β
2
J
ij
σ
2
i
σ
2
j
.
(22.45)
Using a new Ising variable τ
(m)
i
= σ
(m)
i
σ
(m+1)
i
,(22.45)
is written as
H
pair
(σ
1
;τ
1
) =−
ij
β
1
+β
2
τ
1
i
τ
1
j
J
ij
σ
1
i
σ
1
j
.
(22.46)
The pair Hamiltonian is divided into clusters within
which τ
1
i
τ
1
j
=+1 is satisfied. When each cluster is rep-
resented by an effective Ising variable η
(m)
a
with the
index a of clusters, the pair Hamiltonian is expressed
as
H
cl
η
1
=−
a,b
k
a,b
η
1
a
η
1
b
, (22.47)
k
a,b
=(β
1
−β
2
)
i∈a, j∈b
J
ij
σ
1
i
σ
1
j
. (22.48)
The cluster update is introduced as Monte Carlo flips of
the variable η
1
a
starting from configurations with all-up
η
1
a
spins.
After the cluster flip, original Ising variables are
changed as σ
1,2
i
← η
1
a
σ
1,2
i
for i ∈ a, and conventional
Monte Carlo flips are performed in each replica to as-
sure the ergodicity.
In the representation (22.46), the exchange Monte
Carlo corresponds to a simultaneous flip of all τ
1
=−1
clusters. Although the present algorithm was proposed
as early as the cluster algorithm itself and much earlier
than the exchange Monte Carlo, it has not been used
so popularly to date due to complex coding and limited
applicability in comparison with the exchange Monte
Carlo. However, a recent study [22.52] showed that in
two dimensions this algorithm is much faster than the
exchange Monte Carlo.
Part E 22.2
1126 Part E Modeling and Simulation Methods
22.3 Quantum Monte Carlo Method
The quantum Monte Carlo method is a powerful method
to investigate both finite- and zero-temperature proper-
ties of quantum systems. The results are exact within
error bars. This method can be applied to large-size
systems in any dimensions. However, it has a prob-
lem when applied to the systems with large frustrations
or strong correlations. In such systems, almost half of
samples have negative weights, and Monte Carlo simu-
lations do not work well. Hence, readers had better
take care in using the quantum Monte Carlo method for
such systems. The negative-sign problem is explained
in Sect. 22.3.8.
There are several types of quantum Monte Carlo
algorithms. Depending on the model, the most suit-
able algorithm should be chosen: For spin systems
without magnetic fields, the cluster algorithm is ef-
fective (Sect. 22.3.3). Under magnetic fields, the worm
algorithm or the directed-loop algorithm is better
(Sect. 22.3.5). The continuous-time algorithm makes
simulations efficient (Sect. 22.3.4). For electron sys-
tems, the auxiliary-field algorithm is appropriate, es-
pecially for the Hubbard model (Sect. 22.3.6). To
investigate the ground-state properties, projection meth-
ods are suitable (Sect. 22.3.7).
There are other Monte Carlo methods to investigate
quantum systems. Here, we only consider the quantum
Monte Carlo algorithms by which results converge to
the exact value in principle. Hence, approximate meth-
ods like variational Monte Carlo methods or fixed-node
approximations are beyond our scope.
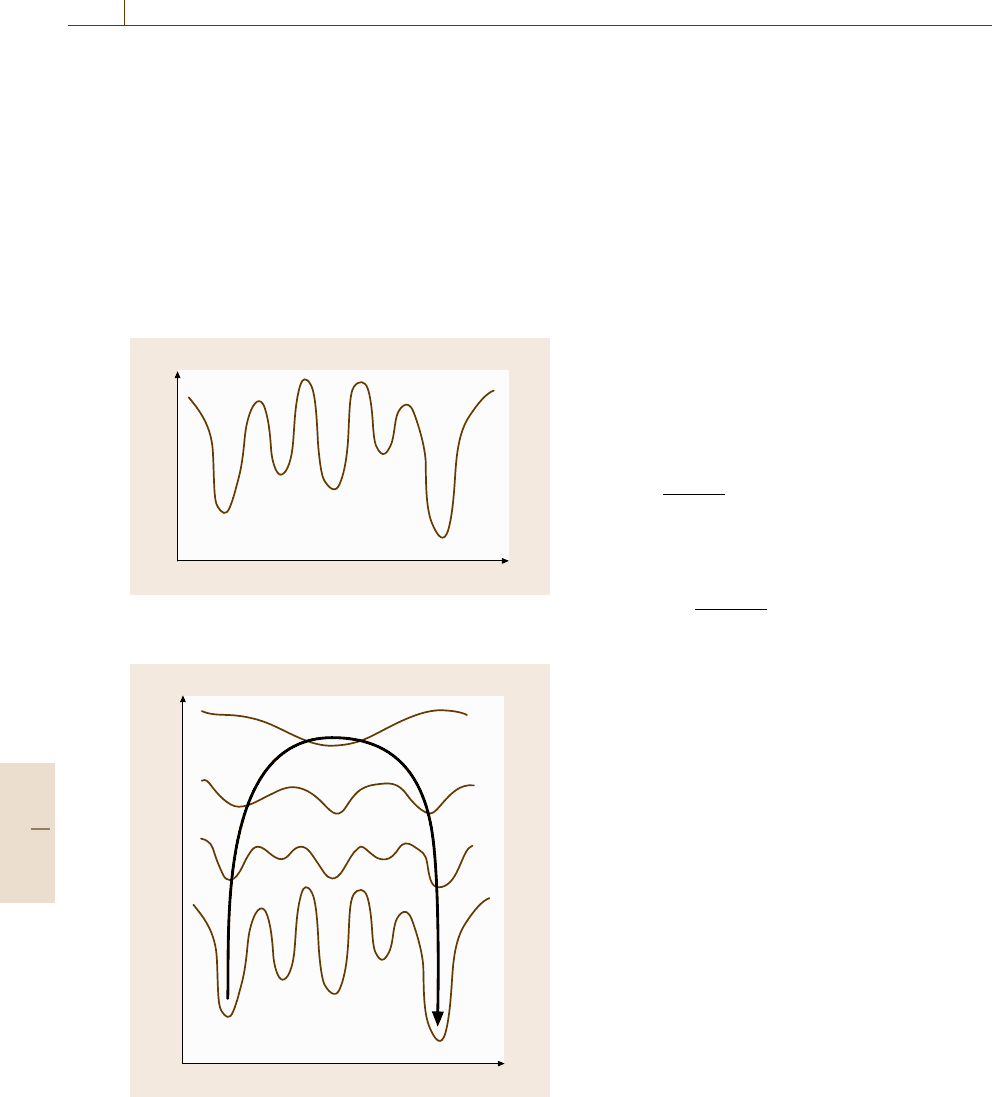
22.3.1 Suzuki–Trotter Formalism
Quantum Monte Carlo simulations in d-dimensional
systems are generally performed through mapping to
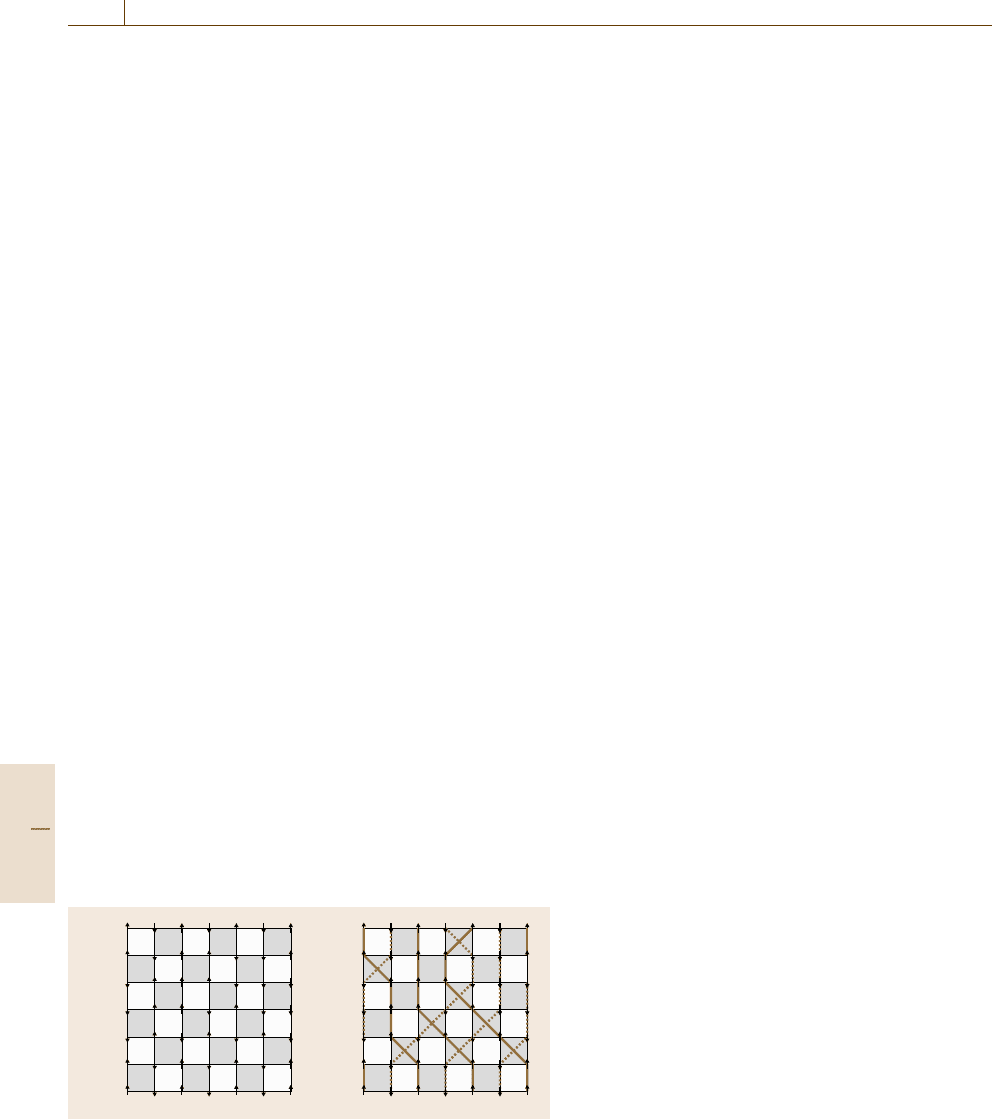
a)
(1)
2
1
.
.
.
m
b)
(1)
2
1
.
.
.
m
1 (1)2 N
s
... 1 (1)2 N
s
...
Fig. 22.4 (a) (d +1)-dimensional space-time for N
s
site quantum
system. (b) World-line configuration. The vertical axis represents
the Trotter axis, and m is the Trotter number
the corresponding (d +1)-dimensional classical sys-
tems. The Suzuki–Trotter transformation is the most
typical procedure of this mapping using the Trotter for-
mula. In order to explain the basics of quantum Monte
Carlo methods, we review first the Suzuki–Trotter for-
malism [22.53].
The partition function of quantum systems is gener-
ally defined as
Z =Tr e
−βH
, (22.49)
where β and H are the inverse temperature and the
Hamiltonian, respectively. Using the generalized Trot-
ter formula, the exponential of quantum Hamiltonians
can be decomposed into the product of exponentials in
infinitesimal time-slices as
e
βH
= lim
n→∞
i
e
−ΔτH
i
n
, (22.50)
where Δτ = β/n,andH
i
is a local Hamiltonian that
satisfies H =
i
H
i
. Inserting complete sets between
time slices, the partition function can be expressed in
terms of local weights as
Z =
A
W(A) , W(A) =
i
w(a
i
) . (22.51)
Here, A denotes a configuration such as shown in
Fig. 22.4a, and a is a local configuration on a plaquette.
Their weights are represented by W(A)andw(a), re-
spectively. Plaquette weights are defined on shaded
plaquettes in Fig. 22.4a.
In this way, the system is mapped onto a (d +1)-
dimensional classical system. This transformation is
called the Suzuki–Trotter transformation [22.54, 55].
Quantum Monte Carlo simulations are performed
through updates of configurations in the (d +1)-
dimensional space-time. For recent progress see [22.56,
57].
22.3.2 World-Line Approach
In order to explain how quantum Monte Carlo simula-
tions are performed in the (d +1)-dimensional space-
time, we here review the world-line algorithm. As an
example, we consider the spin-1/2 Heisenberg model,
which is defined by the following Hamiltonian
H = J
i, j
S
i
·S
j
, (22.52)
Part E 22.3
Monte Carlo Simulation 22.3 Quantum Monte Carlo Method 1127
where the summation is taken over nearest-neighbor
sites, and S
i
denotes the spin operator at site i. All the
possible local configurations and weights of plaquettes
in a time-slice are listed in Table 22.1.
Up spins (or down spins) may be joined by lines as
illustrated in Fig. 22.4b. These lines are called world-
lines [22.58]. In the world-line algorithm, world-line
configurations are updated. One way to update them is
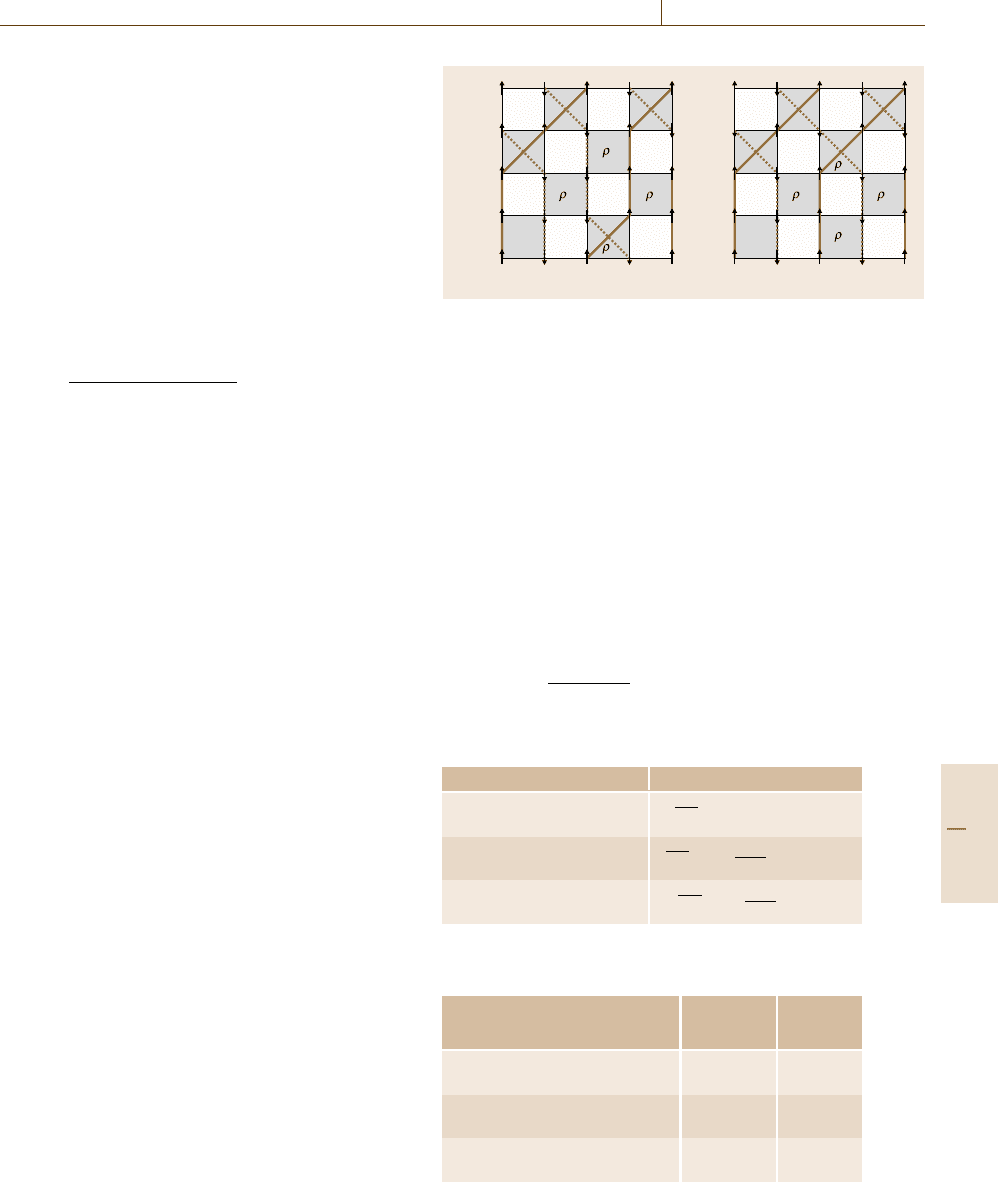
the following: As illustrated in Fig. 22.5,wetrytoflip
four spins (a, b, c, d), taking care so that the flip satisfies
the conservation law of the model. The new world-line
configuration is accepted with the probability
P =
ρ
1
ρ
2
ρ
3
ρ
4
ρ
1
ρ
2
ρ
3
ρ
4
+ρ
1
ρ
2
ρ
3
ρ
4
, (22.53)
based on the heat-bath algorithm (or the Metropolis al-
gorithm). In this way, world-lines are locally moved.
This process is called a local flip. Since the ergodicity
is not satisfied by this type of updates only [22.59], we
need other types of flips. If up spins (or down spins)
align in the imaginary time direction or in the diago-
nal directions, they can flip simultaneously. If up and
down spins align alternately in the space direction, they
can also flip simultaneously. These types of flips are
called global flips [22.60]. Combining these two types
of flips, world-line configurations are updated. Phys-
ical quantities such as magnetization, susceptibilities,
energy and specific heat can be measured using spin
configurations, local weights and their derivatives in the
(d +1)-dimensional space-time [22.61–63].
In the world-line algorithm, the width of the time
slice is finite. Hence, the extrapolation Δτ →0 is nec-
essary after simulations. The error due to the finite Δτ
is systematic: It is proportional to Δτ
2
or Δτ
4
,etc.,de-
pending on the way of decomposition in (22.50) [22.64,
65]. In the continuous-time algorithm, the discreteness
of the Trotter slice is removed by taking Δτ → 0in
the definition of local probabilities as will be discussed
later.
22.3.3 Cluster Algorithm
Spin configurations in the (d +1)-dimensional space-
time can be updated more efficiently by using the
cluster algorithm. For the cluster algorithm in quan-
tum systems [22.35, 40], readers may refer to excellent
overviews in [22.66, 67]. In the cluster algorithm,
spin configurations as in Fig. 22.4a are mapped onto
graphs [22.68, 69]. The weights V(G)ofgraphG are
2
1
4
'
4
'
2
'
3
'
1
3
cd
a b
a)
(1)
4
3
2
1
1234(1)
b)
(1)
4
3
2
1
1 2 3 4 (1)
Fig. 22.5a,b Local flip in the world-line algorithm in a four-spin
system with the Trotter number m =4
defined in order to satisfy the following relation
W(A) =
G
V(G)Δ(A, G) , (22.54)
where Δ(A, G) is one if spin configuration A is com-
patible with graph G, and otherwise zero. Similarly, it
is possible to define the local version of (22.54)as
w(a) =
g
v(g)δ(a, g) . (22.55)
For the Heisenberg model defined in (22.52), δ(a, g)is
chosen as shown in Table 22.2.
The probability P(g|a) of assigning graph g to con-
figuration a is given by
P(g|a) =
δ(a, g)v(g)
w(a)
. (22.56)
Table 22.1 Local configurations and their weights
a w(a)
↑↑
↑↑
,
↓↓
↓↓
e
−
Δτ J
4
↑↓
↑↓
,
↓↑
↓↑
e
Δτ J
4
cosh
Δτ J
2
↑↓
↓↑
,
↓↑
↑↓
−e
Δτ J
4
sinh
Δτ J
2
Table 22.2 Function δ(a, g) for mapping of local configu-
rations to graphs
a
-
g
||
||
↑↑
↑↑
,
↓↓
↓↓
1 0
↑↓
↑↓
,
↓↑
↓↑
1 1
↑↓
↓↑
,
↓↑
↑↓
0 1
Part E 22.3