Czichos H., Saito T., Smith L.E. (Eds.) Handbook of Metrology and Testing
Подождите немного. Документ загружается.


1098 Part E Modeling and Simulation Methods
Step 5
¯
ε
c
ij
is determined from a constraint condition for
the whole body.
Utilizing steps 1 to 5, we are able to evaluate the
elastic strain energy of the coherent two-phase micro-
structure. When we try to calculate the elastic strain
energy, it is important to distinguish the known vari-
ables and the unknown ones. In this case, the given
variable is ε
0
ij
(r) that is calculated directly from the
composition field c(r), and the unknown variable is
ε
c
ij
(r). The following formulation of elastic strain en-
ergy may look complicated, but the basic idea is simple.
We evaluate the unknown variable using the known one
through the mechanical equilibrium equation and the
boundary conditions. Detail of the evaluation method
is explained along the lines of step 1 to 5 as follows.
Step 1
When the lattice parameter a is a linear function of
the composition, i. e., the Vegard’s law is satisfied, a is
given by
a(r) =a
0
+
da
dc
c(r) , (21.28)
where c(r) is a local solute composition of component B
at position r,anda
0
is the lattice parameter for pure
A component. In this case, the eigenstrain is defined by
ε
0
ij
(r) ≡
a(r) −a
0
a
0
=ηc(r)δ
ij
,
η ≡
1
a
0
da
dc
, (21.29)
where η is a lattice mismatch that is calculated from the
lattice parameters of pure A and B metals. Since the lat-
tice parameters of pure component and the composition
field c(r) are given in advance, the spatial distribution
of the eigenstrain ε
0
ij
(r) in the microstructure is easily
calculated from (21.29).
Step 2
Next, the total strain ε
c
ij
(r)isdefinedby
ε
c
ij
(r) ≡
¯
ε
c
ij
+δε
c
ij
(r) , (21.30)
r
δε
c
ij
(r)dr =0 , (21.31)
where
¯
ε
c
ij
is a volume average of ε
c
ij
(r), δε
c
ij
(r)isthe
deviation from
¯
ε
c
ij
, and is defined using the displacement
vector u
i
(r)as
δε
c
kl
(r) ≡
1
2
∂u
k
(r)
∂r
l
+
∂u
l
(r)
∂r
k
. (21.32)
The elastic strain ε
el
ij
(r)isdefinedby
ε
el
ij
(r) ≡ε
c
ij
(r)−ε
0
ij
(r) . (21.33)
On the basis of the linear elasticity theory, the stress is
evaluated based on Hook’s law
σ
el
ij
(r) =C
ijkl
ε
el
kl
(r) =C
ijkl
ε
c
kl
(r) −ε
0
kl
(r)
,
(21.34)
where C
ijkl
is an elastic constant.
Step 3
The mechanical equilibrium equation is expressed as
σ
el
ij
, j(r) =
∂σ
el
ij
(r)
∂r
j
=0 , (21.35)
where the no body force condition is assumed. Substi-
tuting (21.29), (21.32), and (21.34)into(21.35) yields
C
ijkl
∂
2
u
k
∂r
j
∂r
l
=C
ijkl
ηδ
kl
∂c
∂r
j
. (21.36)
The functions c(r), u
i
and δε
c
ij
(r) are expressed in the
form of a Fourier integral as follows
c(r) =
k
ˆ
c(k) exp(ik·r)
dk
(2π)
3
(21.37)
u
i
(r) =
k
ˆ
u
i
(k) exp(ik·r)
dk
(2π)
3
(21.38)
δε
c
ij
(r) =
k
δ
ˆ
ε
c
ij
(k) exp(ik·r)
dk
(2π)
3
, (21.39)
where k =(k
1
, k
2
, k
3
) is a reciprocal wave vector in
Fourier space. Substituting (21.37–21.39)into(21.36)
and focusing on the amplitude part of the Fourier ex-
pression, we obtain
C
ijkl
k
j
k
l
ˆ
u
k
(k) =−iC
ijkl
ηδ
kl
k
j
ˆ
c(k) . (21.40)
This is a Fourier expression of the mechanical equilib-
rium equation. (Note that the upright i is the imaginary
number, not an index for vector or tensor.) Here, we
define the following equations
G
−1
ik
(k) ≡C
ijkl
k
j
k
l
, (21.41)
σ
ij
≡C
ijkl
ηδ
kl
. (21.42)
Using (21.41)and(21.42)in(21.40), the
ˆ
u
k
(k), that is
a Fourier transform of u
k
(r), is given by
ˆ
u
k
(k) =−iG
ik
(k)C
ijkl
ηδ
kl
k
j
ˆ
c(k)
=−iG
ik
(k)σ
ij
k
j
ˆ
c(k) . (21.43)
Part E 21.2
Phase Field Approach 21.2 Total Free Energy of Microstructure 1099
Since the Fourier transform of (21.32)is
δ
ˆ
ε
c
kl
(k) =i
1
2
ˆ
u
k
(k)k
l
+
ˆ
u
l
(k)k
k
, (21.44)
substituting (21.43)into(21.44) yields
δ
ˆ
ε
c
kl
(k) =i
1
2
ˆ
u
k
(k)k
l
+
ˆ
u
l
(k)k
k
=i
ˆ
u
k
(k)k
l
=−iiG
ik
(k)k
j
k
l
σ
ij
ˆ
c(k)
= G
ik
(k)k
l
k
j
C
ijmn
ηδ
mn
ˆ
c(k) . (21.45)
The values of the elastic constant C
ijkl
and the lattice
mismatch η are given from the materials parameters
in advance. Since the composition field c(r)isgiven
beforehand,
ˆ
c(k) is calculated by the first Fourier trans-
form of c(r) numerically. Therefore, δ
ˆ
ε
c
kl
(k) is directly
calculated based on (21.45) and obtained as a function
of k,thenδε
c
kl
(r) is calculated through the inverse first
Fourier transform of δ
ˆ
ε
c
kl
(k) numerically.
Step 4
The elastic strain energy is given as
E
str
=
1
2
r
C
ijkl
ε
el
ij
(r)ε
el
kl
(r)dr
=
1
2
r
!
C
ijkl
¯
ε
c
ij
+δε
c
ij
(r) −ε
0
ij
(r)
×
¯
ε
c
kl
+δε
c
kl
(r) −ε
0
kl
(r)
"
dr ,
(21.46)
where the elastic strain is defined by
ε
el
ij
(r) ≡ε
c
ij
(r)−ε
0
ij
(r)
=
¯
ε
c
ij
+δε
c
ij
(r) −ε
0
ij
(r) (21.47)
and we are able to rewrite (21.46) using (21.47)as
E
str
=
1
2
r
!
C
ijkl
¯
ε
c
ij
+δε
c
ij
(r) −ε
0
ij
(r)
×
¯
ε
c
kl
+δε
c
kl
(r) −ε
0
kl
(r)
"
dr
=
1
2
r
C
ijkl
¯
ε
c
ij
¯
ε
c
kl
dr +
1
2
C
ijkl
¯
ε
c
ij
r
δε
c
kl
(r)dr
−
1
2
C
ijkl
¯
ε
c
ij
r
ε
0
kl
(r)dr
+
1
2
C
ijkl
¯
ε
c
kl
r
δε
c
ij
(r)dr
+
1
2
r
C
ijkl
δε
c
ij
(r)δε
c
kl
(r)dr
−
1
2
C
ijkl
r
δε
c
ij
(r)ε
0
kl
(r)dr
−
1
2
C
ijkl
¯
ε
c
kl
r
ε
0
ij
(r)dr
−
1
2
r
C
ijkl
ε
0
ij
(r)δε
c
kl
(r)dr
+
1
2
r
C
ijkl
ε
0
ij
(r)ε
0
kl
(r)dr
=
1
2
C
ijkl
¯
ε
c
ij
¯
ε
c
kl
r
dr −C
ijkl
¯
ε
c
ij
r
ε
0
kl
(r)dr
+
1
2
C
ijkl
r
ε
0
ij
(r)ε
0
kl
(r)dr
−C
ijkl
r
δε
c
ij
(r)ε
0
kl
(r)dr
+
1
2
r
C
ijkl
δε
c
ij
(r)δε
c
kl
(r)dr
=
1
2
C
ijkl
¯
ε
c
ij
¯
ε
c
kl
−C
ijkl
¯
ε
c
ij
δ
kl
η
r
c(r)dr
+
1
2
C
ijkl
δ
ij
δ
kl
η
2
r
{c(r)}
2
dr
−
1
2
C
ijkl
r
δε
c
ij
(r)ε
0
kl
(r)dr
=
1
2
C
ijkl
¯
ε
c
ij
¯
ε
c
kl
−C
ijkl
¯
ε
c
ij
δ
kl
ηc
0
+
1
2
C
ijkl
δ
ij
δ
kl
η
2
{c(r)}
2
−
1
2
k
n
i
σ
ij
Ω
jk
(n)σ
kl
n
l
δ
ˆ
c(k)
2
dk
(2π)
3
,
(21.48)
Part E 21.2
1100 Part E Modeling and Simulation Methods
where n is a unit vector in the k direction, n ≡k/|k|,and
Ω
−1
ik
(n) ≡C
ijkl
n
j
n
l
. The following equations
r
δε
c
ij
(r)dr =0 ,
r
ε
0
ij
(r)dr =δ
ij
η
r
c(r)dr =δ
ij
ηc
0
,
r
C
ijkl
δε
c
ij
(r)ε
0
kl
(r)dr =
r
C
ijkl
δε
c
ij
(r)δε
c
kl
(r)dr ,
are used for formulation of (21.48). The last relation of
the above equations is obtained as follows
S
δσ
c
ij
(r)u
i
(r)n
j
dS −
r
δσ
c
ij, j
(r)u
i
(r)dr = 0 ,
∵ δσ
c
ij
(r)n
j
=0 ,δσ
c
ij, j
(r) =0
,
r
δσ
c
ij
(r)δε
c
ij
(r)dr = 0 ,
r
C
ijkl
δε
c
ij
(r)
δε
c
kl
(r) −ε
0
kl
(r)
dr = 0 ,
∴
r
C
ijkl
δε
c
ij
(r)ε
0
kl
(r)dr =
r
C
ijkl
δε
c
ij
(r)δε
c
kl
(r)dr ,
where δσ
c
ij
(r) =C
ijkl
δε
c
kl
(r)−ε
0
ij
(r)
and the Gauss in-
tegral is used. Furthermore, the mechanical equilibrium
equation and the force balance at the body surface, i. e.,
the pressure on the surface is assumed to be 0, are con-
sidered.
Step 5
In the final stage of evaluating the elastic strain energy,
the average value of the total strain
¯
ε
c
ij
is determined.
¯
ε
c
ij
is commonly evaluated by one of the following four
types of boundary conditions.
1. The surface of the body is rigidly constrained and
there is no external stress field.
Since the surface is fixed, the average of the total
strain should be 0, i. e.,
¯
ε
c
ij
=0 . (21.49)
2. The body is constrained under homogeneous exter-
nal strain
¯
ε
a
ij
.
In this case, the average total strain is the same as
¯
ε
a
ij
,i.e.,
¯
ε
c
ij
=
¯
ε
a
ij
, (21.50)
where the
¯
ε
a
ij
is a known variable given by the
boundary condition.
3. The surface of the body is unfixed and there is no
external stress.
In this case, since the object can be expanded or con-
tracted freely, the average total strain under a stable
state should satisfy the condition
∂E
str
∂
¯
ε
c
ij
=0 . (21.51)
Substituting (21.48)into(21.51), we obtain the fol-
lowing relation
∂E
str
∂
¯
ε
c
ij
=C
ijkl
¯
ε
c
kl
−C
ijkl
δ
kl
ηc
0
=0 ,
∴
¯
ε
c
kl
=δ
kl
ηc
0
. (21.52)
4. The surface of the body is unfixed and the external
stress σ
a
ij
is applied.
In this case, the Gibbs energy is given as
G = E
str
−σ
a
ij
¯
ε
c
ij
. (21.53)
Since the average of total strain under the stable
state should satisfy the condition
∂G
∂
¯
ε
c
ij
=0 , (21.54)
substituting (21.53)and(21.48)into(21.54) yields
∂G
∂
¯
ε
c
ij
=C
ijkl
¯
ε
c
kl
−C
ijkl
δ
kl
ηc
0
−σ
a
ij
=0 ,
∴
¯
ε
c
kl
=C
−1
ijkl
σ
a
ij
+δ
kl
ηc
0
, (21.55)
where C
−1
ijkl
is an elastic compliance, i. e., an inverse
matrix of C
ijkl
.
It is worth noting that the elastic strain is expressed
using (21.52)as
ε
el
ij
(r) =ε
c
ij
(r) −ε
0
ij
(r)
=
¯
ε
c
ij
+δε
c
ij
(r) −ηδ
ij
c(r)
=δ
ij
ηc
0
+δε
c
ij
(r) −ηδ
ij
c(r)
=δε
c
ij
(r) −ηδ
ij
[
c(r) −c
0
]
. (21.56)
This equation means that the phrases the mechan-
ical equilibrium condition of the uniform strain
is considered and the eigenstrain is redefined as
ε
0
ij
(r) ≡ηδ
ij
[
c(r) −c
0
]
are equivalent.
As for the multicomponent and multiphase system,
the eigenstrain is expressed as a linear function of
the order parameters φ
p
as
ε
0
ij
(r, t) =
p
ε
00
ij
(p) φ
p
(r, t) , (21.57)
Part E 21.2
Phase Field Approach 21.2 Total Free Energy of Microstructure 1101
where φ
p
corresponds to the composition field c and
the squire of crystal structure field s
2
. ε
00
ij
(p) is a lat-
tice mismatch concerning the order parameter φ
p
.
The derivation of elastic strain energy in this case is
straightforward.
The evaluation of E
str
mentioned above is for the homo-
geneous case, i. e., the elastic constant does not depend
on the local order parameter. The elastic strain energy
calculation in inhomogeneous case has been proposed
and discussed in [21.39,40].
21.2.4 Free Energy for Ferromagnetic
and Ferroelectric Phase Transition
The order parameter used to describe ferromagnetic
phase transition is a magnetization moment M,and
the polarization moment P is employed as an order
parameter for representing the ferroelectric phase tran-
sition in dielectric materials. In order to describe the
ferromagnetic or ferroelectric domain microstructure
formation in the phase-field method, the order param-
eters, M and P, are defined as a function of position r
and time t.
Since a description of the energy for the ferro-
magnetic and ferroelectric phase transition has a quite
similar formulation, we explain the total free energy de-
scription for a ferroelectric phase transition during the
structural phase transformation from cubic to tetragonal
along the line of Wang’s analysis [21.20].
In this field, the Landau-type bulk free energy den-
sity is commonly expressed by a six-order polynomial
of the spontaneous polarization
g
c
=α
1
P
2
1
+P
2
2
+P
2
3
+α
2
P
4
1
+ P
4
2
+ P
4
3
+α
3
P
2
1
P
2
2
+P
2
2
P
2
3
+P
2
3
P
2
1
+α
4
P
6
1
+P
6
2
+P
6
3
+α
5
P
4
1
P
2
2
+P
2
3
+ P
4
2
P
2
3
+P
2
1
+P
4
3
P
2
1
+P
2
2
+α
6
P
2
1
P
2
2
P
2
3
, (21.58)
where three variants are considered, and α
i
are constant
coefficients. The subscripts i = 1, 2, and 3; indicate
a variant number. In the Ginzburg–Landau theory, the
free energy function also depends on the gradient of
the order parameter (that is, corresponding to the gradi-
ent energy). For ferroelectric materials, the polarization
gradient energy represents the ferroelectric domain wall
energy. For simplicity, the lowest order of the gradient
energy density takes the form
f
grad
=
1
2
κ
1
P
2
1,1
+P
2
2,2
+ P
2
3,3
+κ
2
P
1,1
P
2,2
+ P
2,2
P
3,3
+ P
3,3
P
1,1
+
1
2
κ
3
P
1,2
+ P
2,1
2
+
P
2,3
+ P
3,2
2
+
P
1,3
+P
3,1
2
+
1
2
κ
4
P
1,2
− P
2,1
2
+
P
2,3
− P
3,2
2
+
P
1,3
−P
3,1
2
, (21.59)
where κ
i
are gradient energy coefficients and P
i, j
denotes the derivative of the ith component of the po-
larization vector P
i
with respect to the jth coordinate.
In the phase-field simulations, each element is rep-
resented by an electric dipole with its strength of the
dipole being given by a local polarization vector P
i
.
The multiple dipole–dipole electric interactions play
a crucial role in calculating the morphology of a do-
main structure and in the process of domain switching
as well. The multiple dipole–dipole electric interaction
energy density is calculated by
f
d
(r) =−
1
2
f
dip
(r) · P(r) , (21.60)
where
f
dip
(r) =−
1
4πε
r
#
P(r
)
|
r −r
|
3
−
3(r −r
)P(r
)·(r −r
)
|
r −r
|
5
$
dr
(21.61)
is the electric field at point r induced by all dipoles.
When there is an externally applied electric field E
a
,
an additional electrical energy
f
a
=−E
e
i
P
i
(21.62)
should be taken into account in the simulations. The
spontaneous strains are associated with spontaneous
polarizations. The eigenstrains are linked to the polar-
ization components in the following form
ε
0
11
= Q
11
P
2
1
+Q
12
P
2
2
+P
2
3
,
ε
0
22
= Q
11
P
2
2
+Q
12
P
2
1
+P
2
3
,
ε
0
33
= Q
11
P
2
3
+Q
12
P
2
1
+P
2
2
,
ε
0
12
=ε
0
21
= Q
44
P
1
P
2
,
ε
0
23
=ε
0
32
= Q
44
P
2
P
3
,
ε
0
31
=ε
0
13
= Q
44
P
1
P
3
, (21.63)
Part E 21.2

1102 Part E Modeling and Simulation Methods
where Q
ij
are the electrostrictive coefficients. When
a dipole is among other dipoles with different ori-
entations, there exist multiple dipole–dipole elastic
interactions. The multiple dipole–dipole elastic inter-
actions play an essential role in the determination of
a domain structure. A twin-like domain structure is
formed when the multiple dipole–dipole elastic inter-
actions predominate.
Due to the constraint of the surroundings, the
polarization-related strains include two parts: the elas-
tic strain and the eigenstrain. The elastic strain related
to polarization and/or polarization switching is given by
ε
el
ij
=ε
c
ij
−ε
0
ij
. (21.64)
When there exists an externally applied homogeneous
stress σ
a
kl
, using the superposition principle, we have the
total elastic strains of the system
ε
el
ij
=ε
c
ij
−ε
0
ij
+S
ijkl
σ
a
kl
, (21.65)
where S
ijkl
is the elastic compliance matrix. Finally, the
elastic strain energy density under the cubic approxima-
tionisgivenby
e
str
=
1
2
C
11
ε
el
11
2
+
ε
el
22
2
+
ε
el
33
2
+C
12
ε
el
11
ε
el
22
+ε
el
22
ε
el
33
+ε
el
33
ε
el
11
+2C
44
ε
el
12
2
+
ε
el
23
2
+
ε
el
31
2
. (21.66)
As described above, the elastic strain energy is a func-
tion of polarization and applied stresses. An applied
electric field can change the polarization and conse-
quently vary the elastic strain energy density. On the
other hand, an applied stress field can also change the
polarization and thus change the electric energy density.
Integrating the free energy density over the entire
volume of a simulated ferroelectric material yields the
total free energy, F
ele
, under externally applied electri-
cal and mechanical loads, E
e
i
and σ
a
kl
. Mathematically,
we have
F
ele
=
r
g
c
(P
i
) + f
grad
(P
i, j
) +e
str
P
i
,σ
e
kl
+f
d
(P
i
) + f
a
P
i
, E
e
i
dr .
(21.67)
As for the energy description for a ferromagnetic phase
transition, the order parameter is changed from P to M.
The bulk Landau free energy density, in this case, cor-
responds the magnetocrystalline anisotropy energy. The
formulation of another parts is almost the same and
straightforward.
21.3 Solidification
21.3.1 Pure Metal
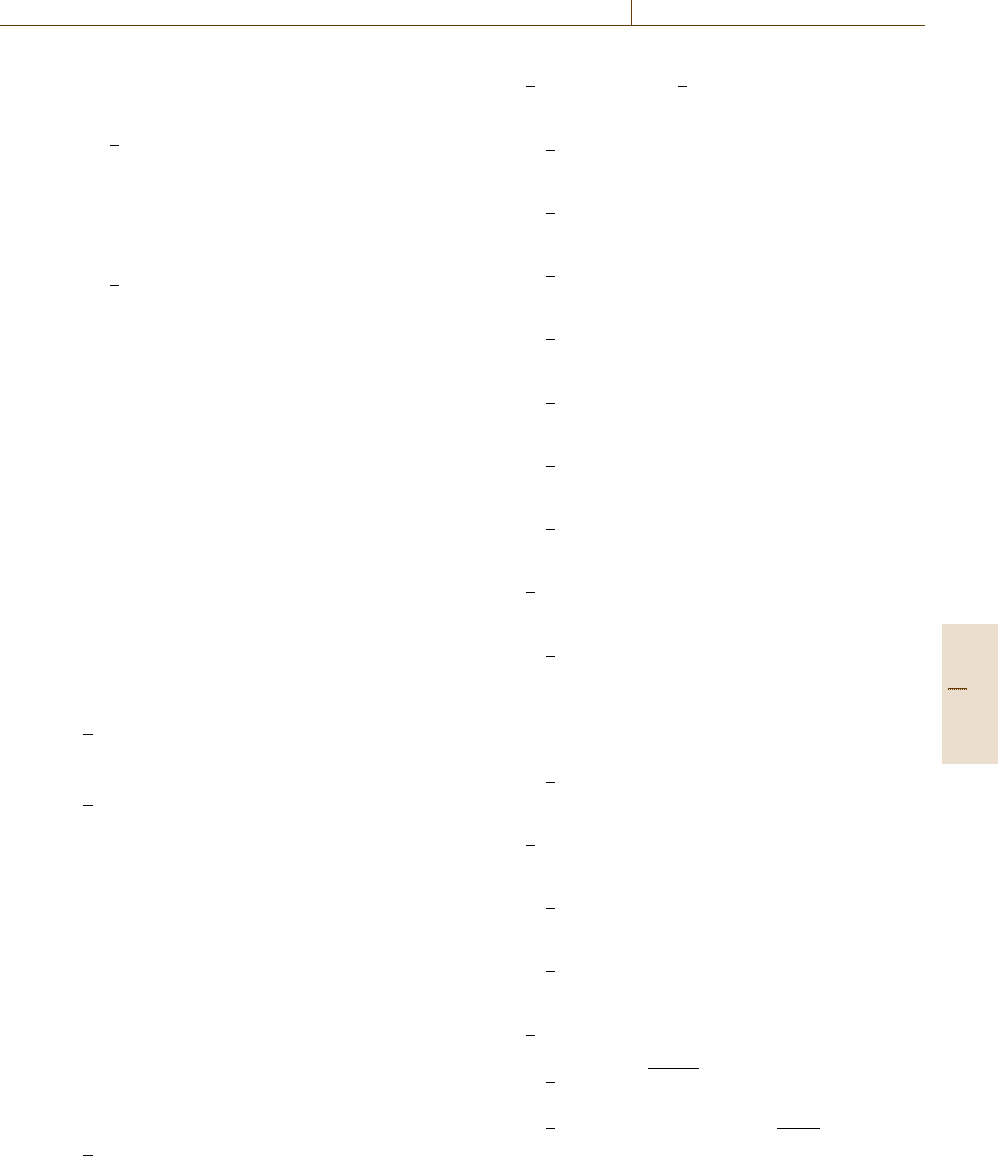
The interface between a liquid phase and a solid one
is expressed by the continuum scalar function φ,which
is called a phase-field variable and takes values from
0 (liquid phase) to 1 (solid phase) as illustrated in
Fig. 21.1. The variable φ is a function of spatial posi-
tion r =(x, y, z) and time t, and then the solidification
process is represented by a temporal development of
the φ field. Indicating the interface using φ, we are
able to treat the complex changes of interface shapes
such as a dendrite. The conditions of the interface
curvature and temperature distribution around the in-
terface are automatically satisfied by employing the
parameters obtained from the physical properties at the
interface.
The total free energy of the pure metal during solid-
ification is given by
F =
V
f (φ, T ) +
1
2
ε
2
|
∇φ
|
2
dV , (21.68)
where f (φ, T ) is a chemical free energy defined by
f (φ, T ) ≡h(φ) f
s
(T )+[1−h(φ)] f
L
(T )+Wg(φ) .
(21.69)
Functions f
s
(T )and f
L
(T ) are the chemical free en-
ergy for the solid and the liquid phase, respectively,
given as a function of temperature T. The function h(φ)
is a monotonic increasing function satisfying the con-
straint h(0) =0andh(1) =1. The product Wg(φ)inthe
right-hand side of (21.69) is the energy barrier term,
which takes a maximum value W within 0 <φ<1and
g(0) =g(1) =0, and is introduced in order to not mix
the solid and liquid phases. The second term inside the
integral of the right-hand side in (21.68) is a gradient
energy that corresponds to the interfacial energy, and
ε
2
is the gradient energy coefficient. When orientation
dependence on the interfacial energy is considered, ε is
assumed as a function of orientation.
In the phase-field method, the temporal and spatial
development of the φ field is assumed to be proportional
Part E 21.3
Phase Field Approach 21.3 Solidification 1103
1
0
0.5
Solid phase Liquid phase
2λ
Distance x
Phase-field φ
Interface region
Fig. 21.1 Schematic illustration of the one-dimensional
profile of phase-field order parameter φ across the inter-
face. The variable φ is commonly defined as a function of
spatial position r and time t, and the field dynamics, such
as a solidification process, is represented by a temporal
development of the field φ(r, t)
to the variation of the total free energy F with respect
to φ, therefore the following differential evolution equa-
tion
∂φ
∂t
=−M
φ
δF
δφ
, (21.70)
is employed, where M
φ
is a mobility of the interface
motion. As for the temporal and spatial changes of
a temperature field, the thermal diffusion equation
∂T
∂t
= D∇
2
T − p(φ)
L
C
p
∂φ
∂t
(21.71)
is applied. The second term of the right-hand side of
(21.71) means the diverging term of heat produced from
latent heat during solidification. Symbols D, L,andC
p
are thermal diffusivity, latent heat, and specific heat,
respectively. A function p(φ) satisfies the conditions
1
0
p(φ)dφ =1andp(0) = p(1) =0, which is often de-
fined by p(φ) ≡ ∂h/∂φ using the function h(φ). The
phase-field method for the solidification simulation in
a pure metal is calculated based on (21.70)and(21.71).
The parameters M
φ
, W,andε are determined from
the interface thickness 2λ (Fig. 21.1) and the interfa-
cial energy density σ . The relations between them are
summarized as
M
φ
=
T
m
μσ
ε
2
L
,σ=
ε
√
W
3
√
2
, 2λ =2.2
√
2
ε
√
W
.
(21.72)
T
m
is the melting temperature, and μ is the kinetic co-
efficient determined by v
n
/μ = f
L
− f
s
−2σ/R that
is an equation of the sharp interface motion, where
v
n
and R are an interface velocity and a curvature
at the interface. The numerical technique to solve the
nonlinear differential equations is commonly a finite
difference simulation. Since the calculation method is
mathematically equivalent to that solving the differen-
tial equation describing temporal field dynamics, we
can utilize many techniques developed in the field of
the computational fluid dynamics.
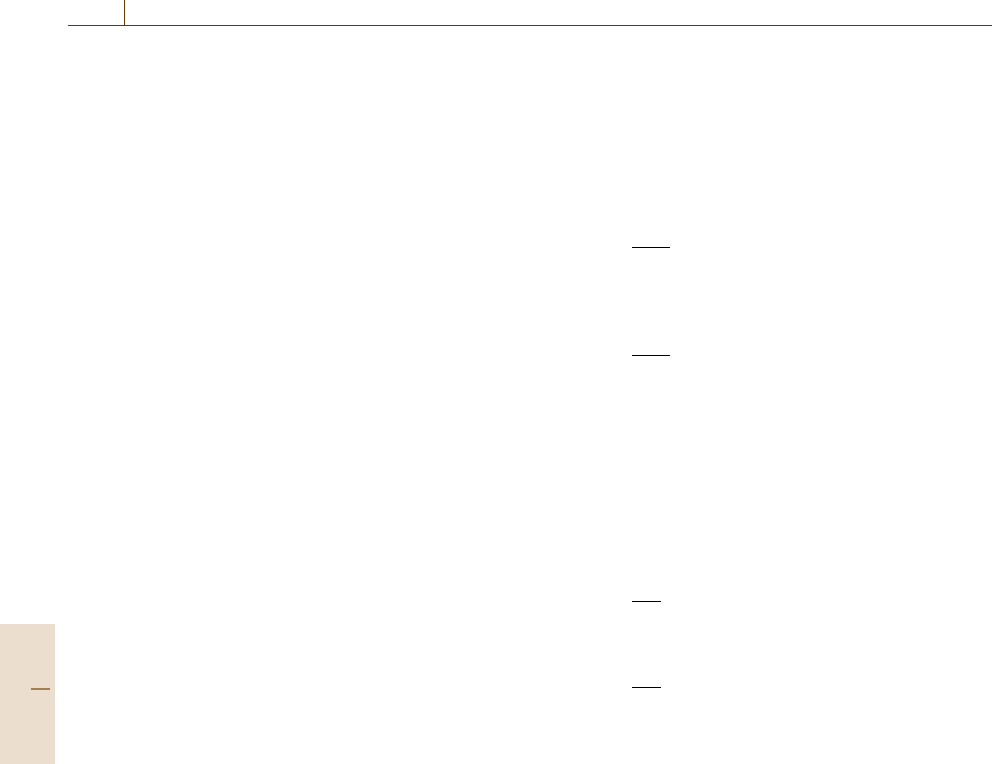
The result of a two-dimensional simulation of den-
drite growth in pure metal is shown in Fig. 21.2. The
black and white parts are the solid and liquid phase, re-
spectively. Note that the complex morphological change
of the realistic dendrite growth is quite reasonably
calculated.
Since the width of the solid–liquid interface in
the solidification process commonly has the length
of an atomic scale, the temperature field causes nu-
merical errors in the gradual interface as shown in
Fig. 21.1, if the numerical difference calculation is per-
formed using coarse difference dividing cells. Since
the parameter M is derived assuming the temperature
is constant within the interface, a small calculation
mesh size is required to neglect the temperature change
though the interface region in the numerical simula-
tion. Hence, the interface width should be negligibly
small as compared to the capillary length and the-
oretically at the sharp interface limit. However, the
value of the interface width is sometimes selected
as large beyond the restriction for the computational
efficiency.
This made the limit of the phase-field method at an
early stage when this simulation method was proposed,
but the new technique (called the thin interface limit
model) of amending the point mentioned above has
already been proposed. For example, Karma and Rap-
pel [21.10] derived the phase-field mobility in the thin
interface limit to relax the restriction of the interface
a) b) c)
Fig. 21.2a–c Two-dimensional phase-field simulation of
a dendrite growth process in pure metal is represented from
(a)–(c).Theblack and white parts represent a solid and
liquid phase, respectively
Part E 21.3

1104 Part E Modeling and Simulation Methods
width and expressed it as follows
M
−1
=
ε
2
L
T
m
σ
1
μ
+
δL
4DC
p
K
−1
,
K =
1
0
h(φ)
[
1 −h(φ)
]
φ(1 −φ)
dφ. (21.73)
This thin interface limit model not only improves com-
puter efficiency but also removes the limitation for the
kinetic coefficient. They showed that the numerical cal-
culation of the dendrite shape using the phase-field
model agreed well with the solvability theory in both
2-D and 3-D. Therefore, we should emphasize that
the idea that the phase-field method always physically
requires a smooth interface is a mistake, and the phase-
field method can be applied to the sharp interface with
one atomic layer.
21.3.2 Alloy
In the phase-field model for alloy solidification, the lo-
cal solute composition c is also employed as one of
the phase-field order parameters and the gradient en-
ergy term for the solute composition field is introduced
into the total free energy functional. But when the inter-
face region is small relative to the entire microstructure
simulated, a similar problem explained for the tempera-
ture field in the above section arises for the composition
field. The thin interface model considering the compo-
sition field was proposed by Kim et al. [21.11]. They
defined the interface as a fraction weighted mixture of
the solid and liquid with different compositions and free
energy, where the compositions of solid and liquid at
the interface are determined to have the same chem-
ical potential μ, i. e., the local equilibrium is assumed
to be
f
s
=c
S
f
s
B
(T ) +(1 −c
S
) f
s
a
(T ) ,
f
L
=c
L
f
L
B
(T )+(1 −c
L
) f
L
a
(T ) ,
c = h(φ)c
S
+[1 −h(φ)] c
L
,
μ
s
(c
S
) =μ
L
(c
L
) . (21.74)
The local solute composition of the solid phase
and the liquid one is denoted by c
S
and c
L
, re-
spectively. This model is called the KKS model
(Kim–Kim–Suzuki model) [21.11], where a so-
lute diffusion equation is solved simultaneously
as
∂c
∂t
=∇·
D
c
(φ)
f
cc
∇ f
c
, (21.75)
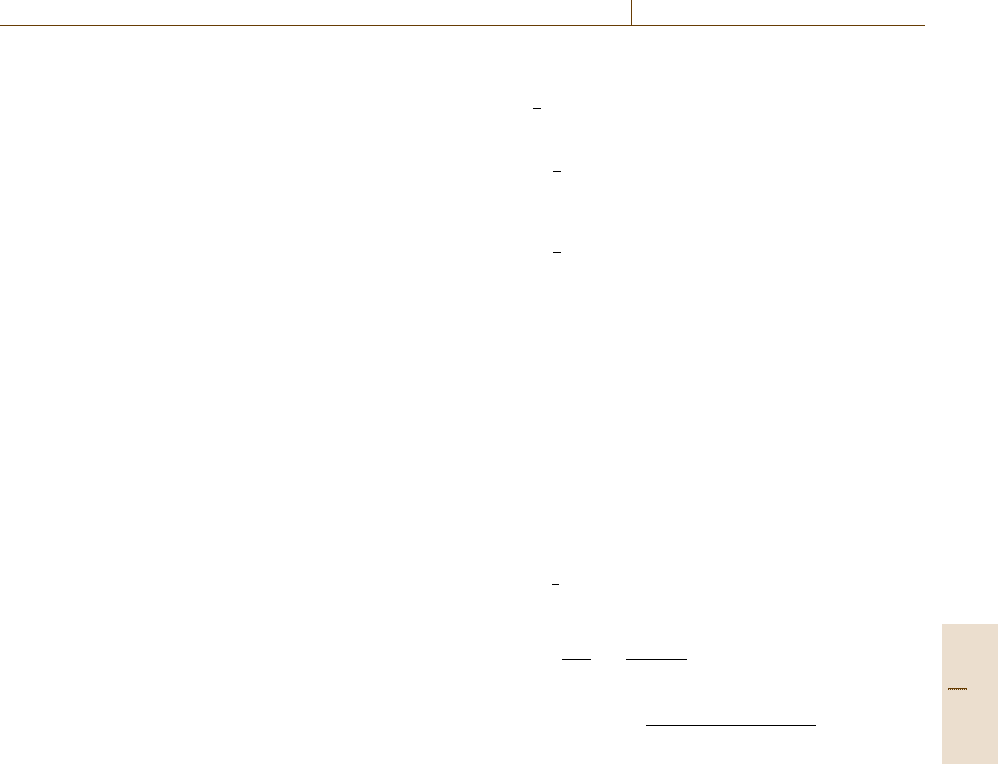
a) b)
Fig. 21.3a,b The change in dendrite shape of steel due
to a ternary alloying element is demonstrated for (a) Fe-
0.5 mol % C; and (b) Fe-0.5mol%C-0.001 mol % P (af-
ter [21.12]). The simulation results show that a small
addition of phosphorus changes the secondary arm spacing
significantly even when it does not significantly change the
interface velocity
where D
c
is the solute diffusivity and f
c
and f
cc
are the first and the second derivatives of the chem-
ical free energy density. The parameters, ε and W,
are the same as the ones in the pure material solid-
ification case defined by (21.72). The mobility M in
the thin interface limit was also derived by Kim et al.
as
M
−1
=
ε
2
σ
RT
V
m
1 −k
e
m
e
1
μ
+
ε
D
L
√
2W
ζ
c
e
S
, c
e
L
,
ζ
c
e
S
, c
e
L
= f
s
cc
c
e
S
f
L
cc
c
e
L
c
e
L
−c
e
S
2
×
1
0
h(φ)
[
1−h(φ)
]
[1−h(φ)] f
s
cc
c
e
S
+h(φ) f
L
cc
c
e
L
1
φ(1 −φ)
dφ,
(21.76)
where D
L
is a diffusion coefficient of liquid phase,
k
e
and m
e
are a partition coefficient and a gradient of
liquidus line on the corresponding phase diagram, re-
spectively. V
m
is a molar volume and the superscript e
indicates that the parameter is in a local equilibrium
state.
The phase-field simulation of the dendrite shape
changes performed by Suzuki et al. for Fe-0.5mol%C
binary alloy and Fe-0.5mol%C-0.001 mol % P ternary
alloy at 1780 K is shown in Fig. 21.3 [21.12]. The
secondary arms develop well and the arm spacing
becomes narrow with a small addition of phospho-
rous because the phosphorous is likely to enrich the
interface and reduce the interface stability. The simu-
lation results show that a small addition of phosphorus
changes the secondary arm spacing significantly even
when it does not significantly change the interface
velocity.
Part E 21.3
Phase Field Approach 21.4 Diffusion-Controlled Phase Transformation 1105
21.4 Diffusion-Controlled Phase Transformation
21.4.1 Cahn–Hilliard Diffusion Equation
Since the relation between the kinetics and the ther-
modynamics of phase transformations is plainly formu-
lated in the diffusion theory treating an interdiffusion,
the diffusion controlled phase decomposition in solid–
solid phase transformations is a very good example for
explaining the relation between energetics and dynam-
ics in microstructure evolution. In this section, the basis
of the diffusion equation concerning phase decomposi-
tion is explained [21.41].
From a physical viewpoint, atom diffusion in solids
is formulated based on the equation of the friction.
Because the diffusion of the atom inside the solid corre-
sponds to the movement of the object in the medium
with a very strong viscosity, the inertia term in the
equation of motion (the so-called Ranjuban equation)
attenuates exponentially and only the friction term will
remain. We consider the case where atom A moves with
speed v
1
and a thermodynamic driving force to move
this atom is assumed to be F
1
. The F
1
is defined by
f
1
=−∇μ
1
, (21.77)
where μ
1
is the chemical potential of component A.
Thus, the velocity of atom A, v
1
, is given by the equa-
tion of the friction
v
1
= M
1
f
1
=−M
1
∇μ
1
, (21.78)
where M
1
is the mobility for atom A diffusion, which is
a parameter indicating the easiness of atom movement
and is physically equivalent to the reciprocal of the fric-
tion coefficient. M
1
is, exactly, a function of the local
composition around the atom A in diffusing, but it is of-
ten assumed to be constant for simplicity. Using (21.78),
we obtain the diffusion flow of component A, J
1
,which
is induced by a driving force F
1
,as
J
1
=c
1
v
1
=−M
1
c
1
∇μ
1
, (21.79)
where c
1
is a local composition of component A.
Next, we derive the equation of interdiffusion for
the diffusion couple of A–B binary system. Henceforth,
the element names A and B are referred to as 1 and 2,
respectively, at the symbol subscript. The equation de-
scribing the interdiffusion is derived by eliminating v
0
in the right-hand side of the following equations, which
are the governing equations for a macroscopic flux flow
of the solute element
J
1
=−c
1
M
1
∇μ
1
+v
0
c
1
,
J
2
=−c
2
M
2
∇μ
2
+v
0
c
2
, (21.80)
where v
0
is a macroscopic flux flow of the so-
lute element, for instance, in the diffusion couple, it
corresponds to the macroscopic velocity of coupling in-
terface. According to the conservation law, the diffusion
equation is defined as
∂c
1
∂t
=−∇· J
1
=∇·
(
c
1
M
1
∇μ
1
−v
0
c
1
)
,
∂c
2
∂t
=−∇· J
2
=∇·
(
c
2
M
2
∇μ
2
−v
0
c
2
)
. (21.81)
Therefore, the relation
∂(c
1
+c
2
)
∂t
=∇·(c
1
M
1
∇μ
1
+c
2
M
2
∇μ
2
−v
0
) =0
∴ c
1
M
1
∇μ
1
+c
2
M
2
∇μ
2
−v
0
=C : const
is obtained by considering c
1
+c
2
=1. Furthermore, if
we assume ∇μ
1
= 0, ∇μ
2
= 0andv
0
= 0 at the po-
sition far from the coupling interface, the value of C
should be 0. Because C is a constant and independent
of position. Therefore, the velocity of the coupling in-
terface is given by
v
0
=c
1
M
1
∇μ
1
+c
2
M
2
∇μ
2
. (21.82)
Substituting (21.82)into(21.81), we obtain the interdif-
fusion equation as a form of
J
1
=−(c
2
M
1
+c
1
M
2
)c
1
∇μ
1
=−(c
2
M
1
+c
1
M
2
)c
1
c
2
∇(μ
1
−μ
2
)
=−(c
2
M
1
+c
1
M
2
)c
1
c
2
∇
∂g
c
∂c
1
=−(c
2
M
1
+c
1
M
2
)c
1
c
2
∂
2
g
c
∂c
2
1
∇c
1
,
J
2
=−(c
2
M
1
+c
1
M
2
)c
2
∇μ
2
=−(c
2
M
1
+c
1
M
2
)c
1
c
2
∇(μ
2
−μ
1
)
=−(c
2
M
1
+c
1
M
2
)c
1
c
2
∇
∂g
c
∂c
2
=−(c
2
M
1
+c
1
M
2
)c
1
c
2
∂
2
g
c
∂c
2
2
∇c
2
. (21.83)
In the formulation of (21.83), the Gibbs–Duhem rela-
tions
c
1
dμ
1
+c
2
dμ
2
=0 ,
→ c
1
dμ
1
+c
2
dμ
1
=c
2
dμ
1
−c
2
dμ
2
,
∴ dμ
1
=c
2
d(μ
1
−μ
2
)
Part E 21.4
1106 Part E Modeling and Simulation Methods
and
∂g
c
∂c
1
=μ
1
−μ
2
+c
1
∂μ
1
∂c
1
+c
2
∂μ
2
∂c
1
=μ
1
−μ
2
,
∂g
c
∂c
2
=μ
2
−μ
1
,
are used, where g
c
is a chemical free energy density.
According to (21.83), the interdiffusion coefficient is
expressed as follows
˜
D
1
=(c
2
M
1
+c
1
M
2
)c
1
c
2
∂
2
g
c
∂c
2
1
,
˜
D
2
=(c
2
M
1
+c
1
M
2
)c
1
c
2
∂
2
g
c
∂c
2
2
. (21.84)
In particular, when g
c
is a chemical free energy
for an ideal solid solution, we find the relation
∂
2
g
c
/∂c
2
1
= ∂
2
g
c
/∂c
2
2
= RT/(c
1
c
2
) and entering this
into (21.84), we have
˜
D
1
=
˜
D
2
=c
2
M
1
RT +c
1
M
2
RT = c
2
D
∗
1
+c
1
D
∗
2
,
(21.85)
where D
∗
1
= M
1
RT and D
∗
2
= M
2
RT are the Einstein’s
relations, R is the gas constant and T is the absolute
temperature, and D
∗
i
is a self-diffusion coefficient.
On the other hand, the phenomenological equation
for the generalized Fick’s first law is defined as
J
1
=−L
11
∇μ
1
−L
12
∇μ
2
,
J
2
=−L
21
∇μ
1
−L
22
∇μ
2
, (21.86)
where L
ij
is the Onsager coefficient, which should sat-
isfy the relation
L
11
+L
21
=0 , L
12
+L
22
=0 , L
12
= L
21
.
(21.87)
The above relation is derived from the restriction of
solute conservation law and the condition of the de-
tailed balance of local equilibrium. Considering (21.87)
in (21.86), we get
J
1
=−L
11
∇(μ
1
−μ
2
) ,
J
2
=−L
22
∇(μ
2
−μ
1
) . (21.88)
Since (21.83)and(21.88) should be the same equation,
the Onsager coefficient is given by
L
11
= L
22
=(c
2
M
1
+c
1
M
2
)c
1
c
2
,
L
12
= L
21
=0 . (21.89)
An important point is that the interdiffusion and
Onsager coefficients are obtained using (21.84)and
(21.85), if a self-diffusion coefficient and a chemical
free energy function g
c
are experimentally determined.
Although we considered the chemical free energy g
c
in the formulation mentioned above, the more general
evolution equation that is able to describe the mi-
crostructure changes in the diffusion controlled phase
transformation can be deduced using the total free en-
ergy of the microstructure G
sys
instead of the chemical
free energy g
c
. For instance, the diffusion flux J
2
is
expressed as
J
2
=−(c
2
M
1
+c
1
M
2
)c
1
c
2
∇
δG
sys
δc
2
. (21.90)
By comparing (21.83)and(21.90), the mobility M
c
should be written as
M
c
(c
2
) =(c
2
M
1
+c
1
M
2
)c
1
c
2
. (21.91)
Therefore, the nonlinear diffusion equation describing
diffusion-controlled phase transformations is given as
∂c
2
∂t
=∇·
M
c
(c
2
)∇
δG
sys
δc
2
, (21.92)
where the composition fluctuation term (i. e., the ran-
dom noise term) is ignored.
This equation is a general form for the diffusion
equation, and the Cahn–Hilliard equation [21.29] is also
constructed from this equation. In the spinodal theory,
the total free energy G
sys
of the phase decomposed in-
homogeneous microstructure is expressed as
G
sys
=
1
L
x
g
c
(c)+η
2
Y
hkl
(c −c
0
)
2
+κ
∂c
∂x
2
dx ,
(21.93)
where the one-dimensional system (the one-dimensional
spatial direction is denoted by x with a total length L)
is considered for simplicity, and c is a local solute com-
position of element B in an A–B binary alloy system.
The quantities η, Y
hkl
,andκ are the lattice mismatch,
the function of the elastic constants, and the composi-
tion gradient energy coefficient, respectively. The first,
second, and third terms in the integral at the right-hand
side of (21.93) correspond to a chemical free energy,
an elastic strain energy, and a composition gradient en-
ergy, respectively. If F is defined by the sum of these
three terms and the variation principle is applied to F
Part E 21.4
Phase Field Approach 21.4 Diffusion-Controlled Phase Transformation 1107
with respect to the invariant variables c, x,and(∂c/∂x),
the variation δG
sys
/δc is given as
δG
sys
δc
=
∂F
∂c
−
d
dx
∂F
∂(∂c/∂x)
=
∂g
c
(c)
∂c
+2η
2
Y
hkl
(c −c
0
) −2κ
∂
2
c
∂x
2
,
(21.94)
where the Euler equation is considered. δG
sys
/δc is
commonly called as a diffusion potential. Substituting
(21.94)into(21.92), we obtain the nonlinear diffusion
equation
∂c
∂t
=
∂
∂x
˜
D
∂c
∂x
−2
∂
∂x
˜
K
∂
3
c
∂x
3
, (21.95)
where
˜
D ≡ M
c
(c)
∂
2
g
c
(c)
∂c
2
+2η
2
Y
hkl
,
˜
K ≡ M
c
(c)κ . (21.96)
In many textbooks of spinodal decomposition, M
c
is assumed to be a constant and
˜
K has been moved out
beside the differentiation in the second term at the right-
hand side in (21.95). The value
˜
D,definedby(21.96), is
then the interdiffusion coefficient for the coherent phase
decomposition.
In the practical viewpoint for the actual numerical
simulation, it is effective to directly solve the equation
∂c
∂t
=
∂
∂x
M
c
∂μ
sys
∂x
(21.97)
instead of (21.95). In order to solve (21.97), the dif-
fusion potential μ
sys
≡ δG
sys
/δc is first calculated as
a function of local position x and time t,andthen
(21.97) is solved using a numerical simulation tech-
nique such as a finite difference method.
21.4.2 Spinodal Decomposition
and Ostwald Ripening
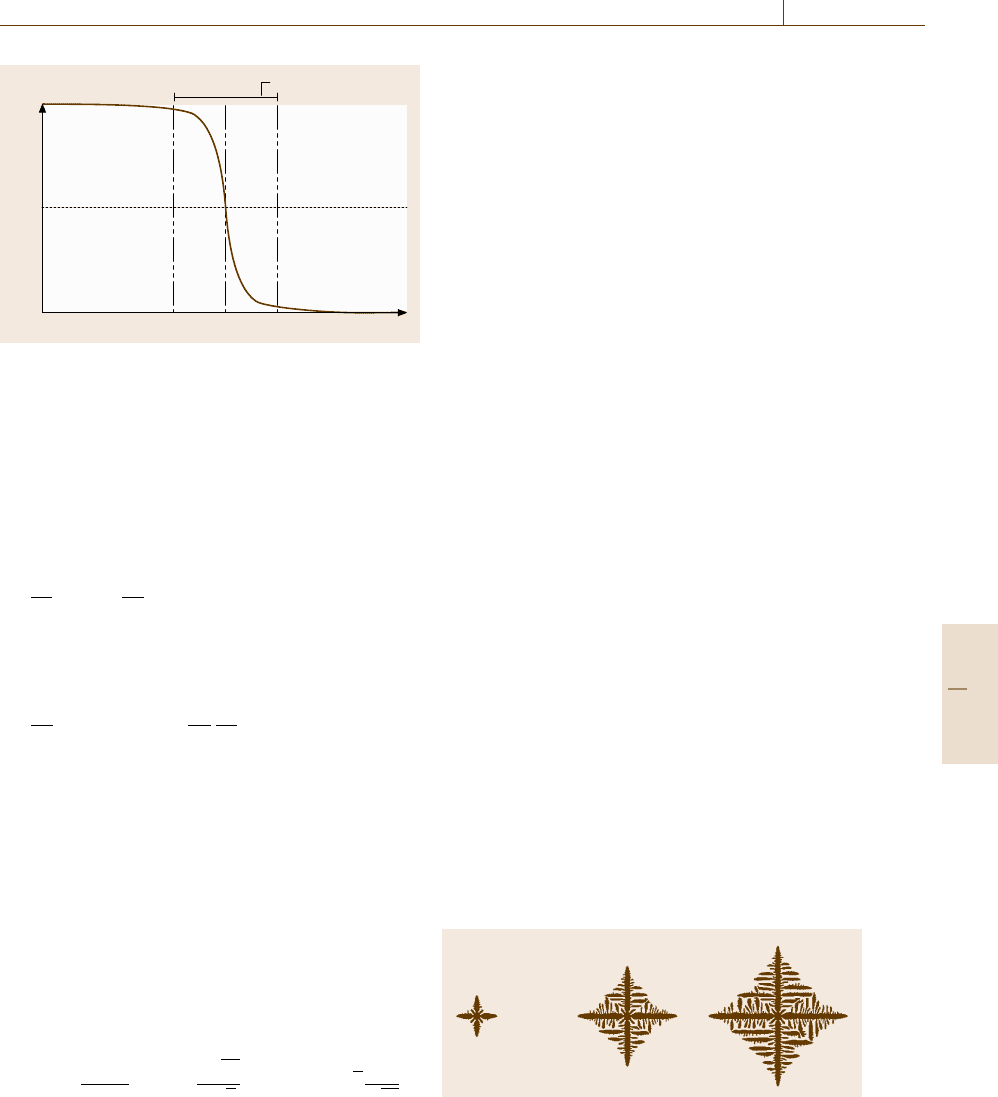
Two-dimensional simulation of the spinodal decompo-
sition in the Fe-40 at. % Mo alloy within bcc crystal
structure during isothermal aging at 773 K is repre-
sented in Fig. 21.4 [21.14], where the Mo composition
is indicated using grayscale, i. e., the black part corres-
ponds to the Mo-rich region. The phase decomposition
is clearly recognized to progress with aging. The lat-
tice mismatch of the Fe-Mo alloy system is so large
20 nm
a) 0s' b) 30s' c) 50s'
d) 250 s' e) 500s' f) 1ks'
Fig. 21.4a–f Two-dimensional simulation of the spinodal decom-
position in the Fe-40 at. % Mo binary alloy with bcc crystal structure
during isothermal aging at 773 K, where the Mo composition is in-
dicated by gray scale,i.e.,theblack part corresponds the Mo rich
region. The lattice mismatch of the Fe-Mo alloy system is so large
that a modulated structure, i. e., the microstructure with fine Mo-
rich zones along the 100directions, is produced by the mechanism
of spinodal decomposition. Numerical values in the figure are the
dimensionless aging time
20nm
t = 40s'
t = 60s'
t = 800 s'
t = 200 s'
Fig. 21.5 Three-dimensional phase field simulation for the spinodal
decomposition of Fe-40 at. % Cr binary alloy at 773 K. The symbol t
is a dimensionless normalized aging time. The precipitate phase is
represented by an isocomposition surface of 40 at. %Cr
Part E 21.4