Цыпкин Я.З Основы теории автоматических систем
Подождите немного. Документ загружается.

252
ПРОЦЕССЫ
В
НЕЛИНЕЙНЫХ
СИСТЕМАХ
[ГЛ.
16
Для линейной системы,
в
силу (16.10),
это
уравнение принимает
особенно
простой
вид:
х
а
(0
=
—
(j
w{x)x
a
[t-x)dx.
(16.15)
о
Уравнение
(16.15) имеет единственное решение
x
a
(/)=:jK
a
=
O,
(16.16)
соответствующее
состоянию
равновесия.
В нелинейных системах возможны, вообще говоря, несколько
состояний
равновесия. Полагая
в
(16.14)
x
R
(t)~
X
s
-
=
const,
по-
лучим
оо
х
а
=
—
Ф
{х
п
)
Л
w{%)dx.
(16.17)
Передаточная функция
W(p)
линейной части системы связана
с
ее импульсной характеристикой преобразованием Лапласа
оо
W{p)=\
w(x)e~P
x
dx,
(16.18)
о
и, значит,
при
р
= 0
оо
W(0)=^w(x)dx.
(16.19)
0
Из уравнения (16.17) получаем
ф(ха
)
=
-тЙо)"*
а
-
(16
'
20)
Используя обозначение статического коэффициента линеариза-
ции
(15.6)
ф
(*а)
=
#0
^а)
х
^
(
Х
а
ф Q)
(16.21)
перепишем
(16.20)
в
виде
Ш
(
х
)
_
,
R
\
х
>—
w
(0)
'
Для определения состояний равновесия воспользуемся уравне-
нием
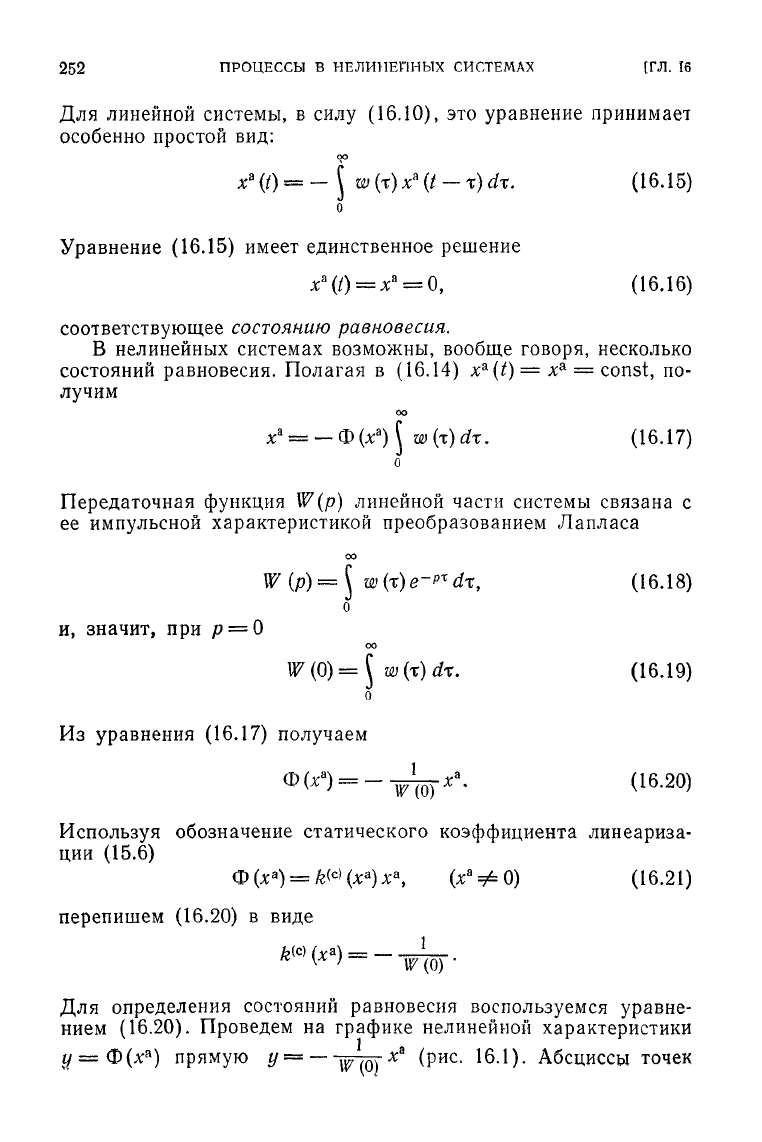
(16.20). Проведем
на
графике нелинейной характеристики
у
=
ф(х
а
)
прямую
у —
—
w
,
Q
v
x
a
(рис.
16.1). Абсциссы точек
§ 16.3]
ВОЗМОЖНЫЕ
РЕЖИМЫ НЕЛИНЕЙНЫХ СИСТЕМ
253
Рис.
16.1.
их пересечения определяют значения возможных состояний рав-
новесия.
Так, при
W(0)
>
О состояние равновесия системы един-
ственное
х
а
=
0, при
W(O)<CO
(что
соответствует
не отрица-
тельной, а положительной обратной связи) в системе возможны
также и состояния равно-
весия, отличные от нуле-
ч
у=Ф{х
а
)
вого.
Помимо
состояний рав-
новесия в нелинейной си-
стеме возможны периоди-
ческие процессы. Эти ав-
тономные периодические
процессы,
соответствую-
щие периодическим реше-
ниям
уравнения (16.4), на-
зываются
автоколебания-
ми. Автоколебания поро-
ждаются не внешними пе-
риодическими воздей-
ствиями, а «внутренними
силами» нелинейной си-
стемы. Таким образом, в отличие от линейных систем, в нели-
нейных системах возможно наличие нескольких состояний равно-
весия и специфических автономных периодических процессов —
автоколебаний.
§
16.3.
Возможные
режимы
нелинейных
систем
Приложение внешних воздействий к нелинейным системам
может вызвать в них разнообразные и сложные режимы. По-
мимо вынужденных процессов, которые «по образу и
подобию»
напоминают внешние воздействия в линейных системах, воз-
можны и иные виды вынужденных процессов. Так, постоянное
внешнее воздействие может вызвать изменение состояний рав-
новесия.
Действительно, если в уравнении
(16.4)
положить
МО
=
*
=
const
(16.22)
и обозначить
x
B
(t)
=
х
я
(t)
=
#
a
,
то,
учитывая,
как и
ранее,
(16.19),
получим
x*^c-<D{x
a
)W(0),
(16.23)
или
ф
^—тпг-
(16
-
24)
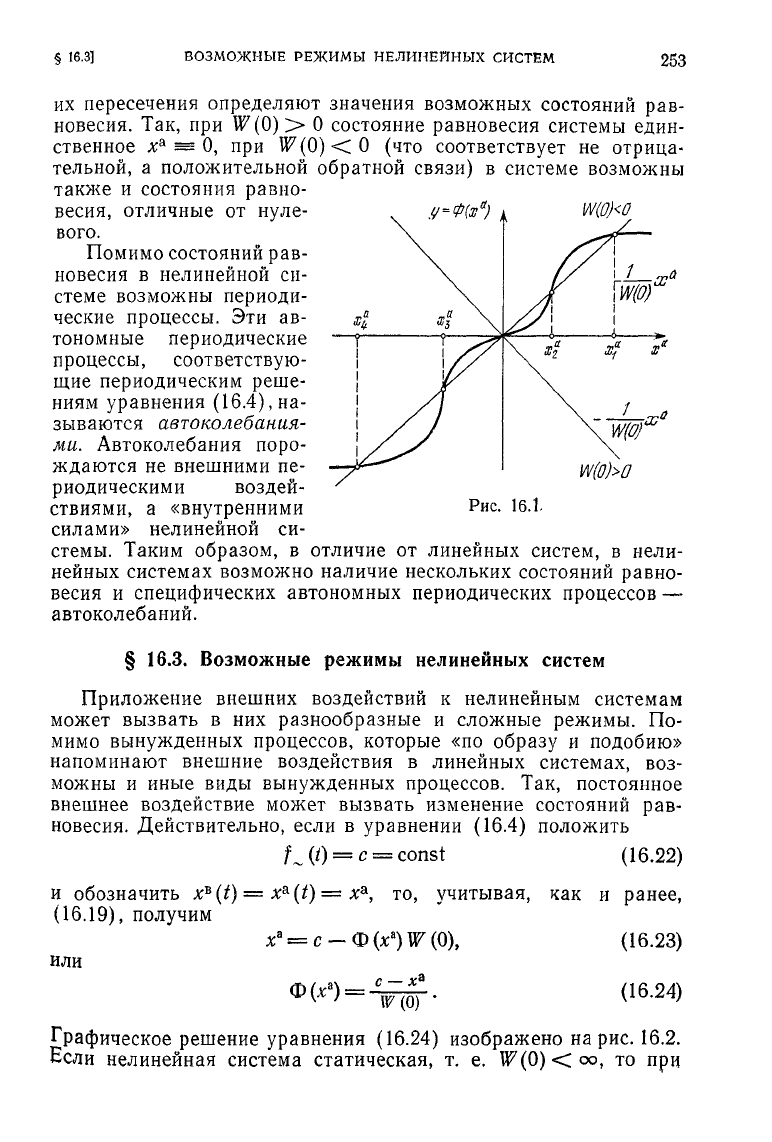
Графическое решение уравнения
(16.24)
изображено на рис. 16.2.
Если нелинейная система статическая, т. е.
W(0)<oo
9
то при
254
ПРОЦЕССЫ
В НЕЛИНЕЙНЫХ СИСТЕМАХ
[ГЛ
Тб
изменении
величины внешнего воздействия изменяется состоя-
ние
равновесия, а при
Щ0)<0
возможно также изменение и
числа состояний равновесия.
w(o)>o
Ш0)<0
Рис.
16.2.
Если
линейная система астатическая, т. е.
Щ0)=оо,
то из
(16.24)
следует
Ф(х
а
)
=
0,
и,
значит, для однозначных функций у
=
ф(х)
откуда
следует,
что
в
нелинейной
астатической
системе
нулевое
состояние
рав-
новесия
при
изменении
постоянного
воздействия
f
^
(t) не
изменяется.
Изменение
постоянного воздействия может привести к изме-
нению
частоты и амплитуды либо к смене автоколебаний. Пе-
риодическое воздействие при определенных условиях подавляет
автоколебания и навязывает нелинейной системе свою частоту
либо
частоту,
меньшую этой в целое число раз.
Такие
режимы называются режимами принудительной син-
хронизации на основной частоте либо, соответственно, на часто-
те субгармоник.
Возможен и режим совместного существования вынужденных
колебаний
и автоколебаний, т. е. режим биений. Исследование
§
16.4]
ОБЩИЕ
СВОЙСТВА ПРОЦЕССОВ
255
всех возможных режимов нелинейной системы
с
произвольной
линейной
частью представляет собой
в
настоящее время нераз-
решимую
задачу.
§
16.4. Общие свойства процессов
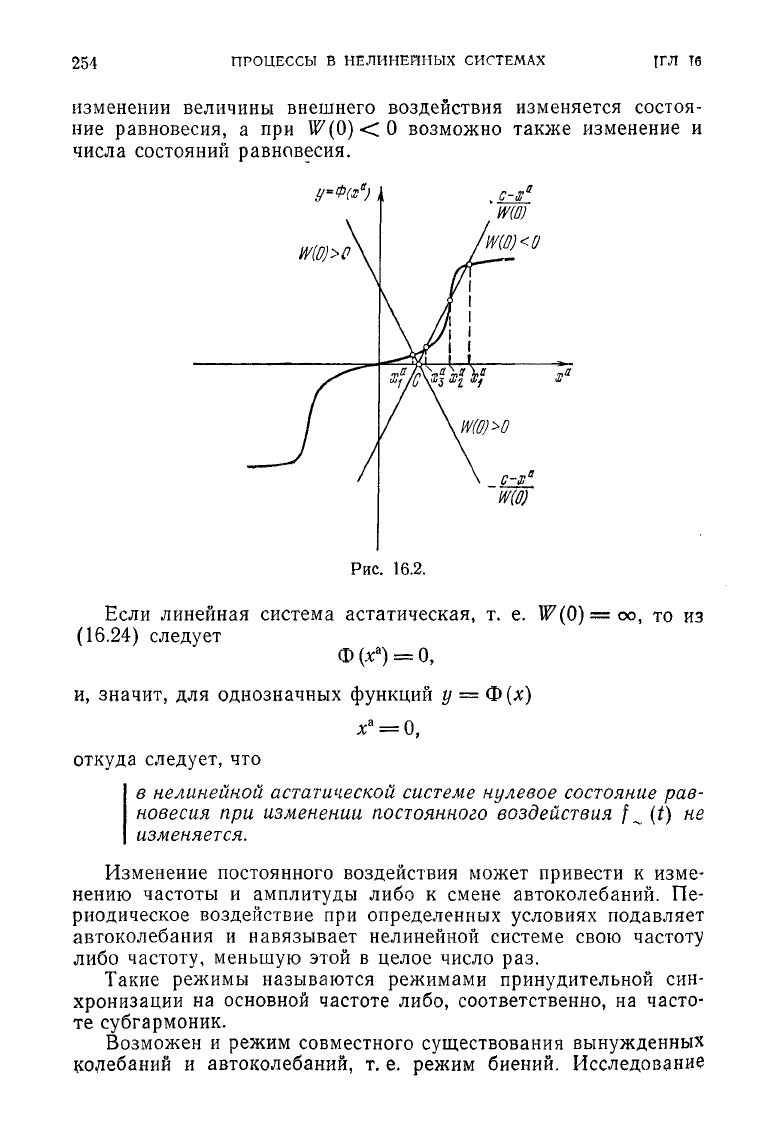
Выясним некоторые общие свойства процессов
в
нелинейных
системах. Рассмотрим сначала нелинейные системы
при
отсут-
ствии насыщения нелинейных
эле-
ментов.
В
этом
случае
(рис. 16.3)
функция
Ф(х),
определяющая
нелинейность,
как
правило, может
быть задана соотношением
(16.25)
где
|
Д (х)
0</г<оо,
^
Д =
const
< оо,
+
0,
Рис.
16.3
dx
(16.26)
Для нелинейностей этого типа
статический
k^(x)
и
дифферен-
циальный
£<#(*)
коэффициенты линеаризации удовлетворяют
условиям
lim
k
{c)
(x)=
lim
—~=
k>0,
=
lim
d<b
.
(x)
=k>0.
lim
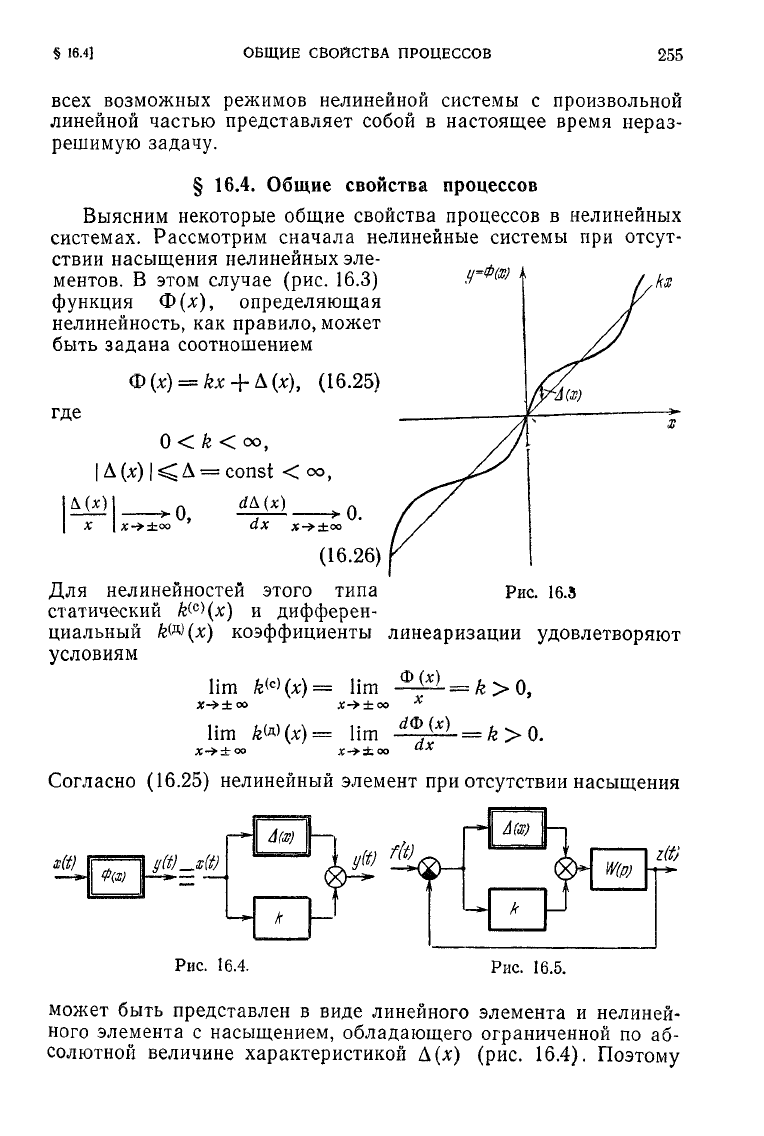
Согласно
(16.25)
нелинейный элемент
при
отсутствии насыщения
Рис.
16.4.
Рис.
16.5.
может быть представлен
в
виде линейного элемента
и
нелиней-
ного элемента
с
насыщением, обладающего ограниченной
по аб-
солютной величине характеристикой
Д(#)
(рис.
16.4). Поэтому
256
ПРОЦЕССЫ
В
НЕЛИНЕЙНЫХ
СИСТЕМАХ
[ГЛ.
Тб
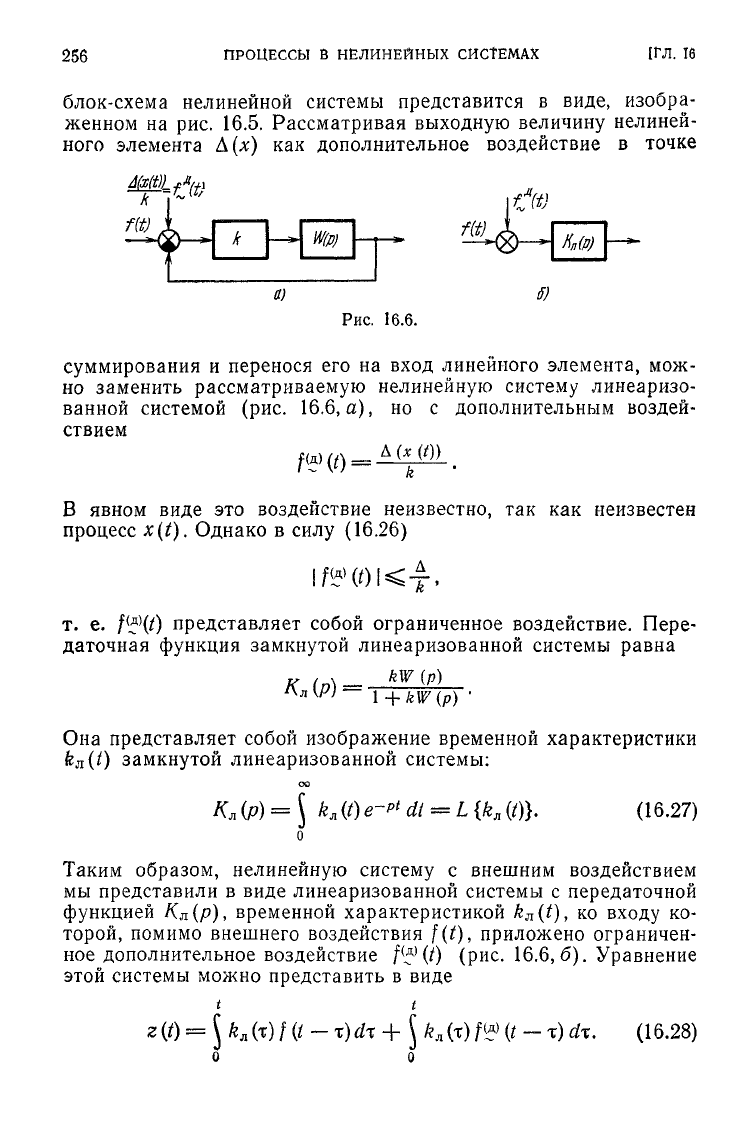
блок-схема нелинейной системы представится в виде, изобра-
женном
на рис. 16.5. Рассматривая выходную величину нелиней-
ного элемента А(х) как дополнительное воздействие в точке
fit)
б)
Рис.
16.6.
суммирования и перенося его на
вход
линейного
элемента, мож-
но
заменить рассматриваемую нелинейную систему линеаризо-
ванной
системой (рис. 16.6, а), но с дополнительным воздей-
ствием
В явном виде это воздействие неизвестно, так как неизвестен
процесс x(t). Однако в силу
(16.26)
т. е.
т. е.
№(t)
представляет собой ограниченное воздействие. Пере-
даточная функция замкнутой линеаризованной системы равна
КГ
п\
Ал1/?)
~ 1 +
kW(p)
*
Она
представляет собой изображение временной характеристики
к
л
(()
замкнутой линеаризованной системы:
л
(Р)
=
\
К
(t)
=
L
{k
n
{t)}.
(16.27)
Таким
образом, нелинейную систему с внешним воздействием
мы представили в виде линеаризованной системы с передаточной
функцией
/Сл(р),
временной характеристикой
&
л
(0>
ко
входу
ко-
торой,
помимо внешнего воздействия
/(/),
приложено ограничен-
ное
дополнительное воздействие
f№
(t) (рис.
16.6,6).
Уравнение
этой
системы можно представить в виде
(0
=
J
К
Ь)
f((-x)dx+\k,
(т) f
<Д)
(t - т) dr. (16.28)
§
16
4]
ОБЩИЕ
СВОЙСТВА ПРОЦЕССОВ
257
Обозначим выходную величину линеаризованной системы при от-
сутствии дополнительного воздействия через
z
R
(t).
Очевидно,
t
zAt)=\K{T)f{t-x)d%.
(16.29)
О
Отличие нелинейной системы
от
линеаризованной характери-
зуется разностью их выходных величин:
6г(/)
=
г(/)-г
л
(/).
(16.30)
Вычитая (16.29)
из
(16.28),
получаем
t
bz
(t)
=
J
к
л
(т)
fw
(t
- т) dx. (16.31)
о
Оценивая
обе части
(16.31),
получим
t
| bz (t)
|<
J
|
k
a
(т)
11
/<д>
(/
-
т)
I
it.
(16.32)
0
Учитывая ограниченность дополнительного воздействия
и
пола-
гая
в
(16.32)
t =
оо, мы лишь усилим оценку,
и
тогда
(16.33)
Если
линеаризованная система устойчива,
а
только этот случай
имеет смысл рассматривать,
то
интеграл
в
правой части (16.33)
конечен,
и
мы получаем оценку изменения процесса нелинейной
системы по сравнению
с
линеаризованной.
Таким
образом,
максимальное
отклонение
процесса
в
нелинейной
системе
от
процесса
в
линеаризованной
системе
определяется
ве-
личиной
наибольшего
отличия
Д
нелинейной
характеристи-
ки от
линейной,
коэффициентом
усиления
линейного
эле-
мента
k и
площадью
абсолютной
величины
временной
ха-
рактеристики
в
линеаризованной
системе.
Если
временная характеристика линеаризованной системы
неотрицательна,
*(
, учитывая (16.27), получаем
оо оо
\
|
К
(т)
I
dx
=
\к
л
(х) dx
=
К
л
(0)
=
, ^
0)
(0)
<
1
•
(16.34)
0
0
9
Я 3
Цчпкич
258
ПРОЦЕССЫ
В НЕЛИНЕЙНЫХ СИСТЕМАХ
[ГЛ. та
Для астатических систем
(W(0)
=
oo)
в (16.34) имеет место
равенство и оценка (16 33) принимает особенно простой вид:
<4-
(16
-
35
)
-А
с.
16.7
Это наибольшее возмож-
Т
ное отклонение.
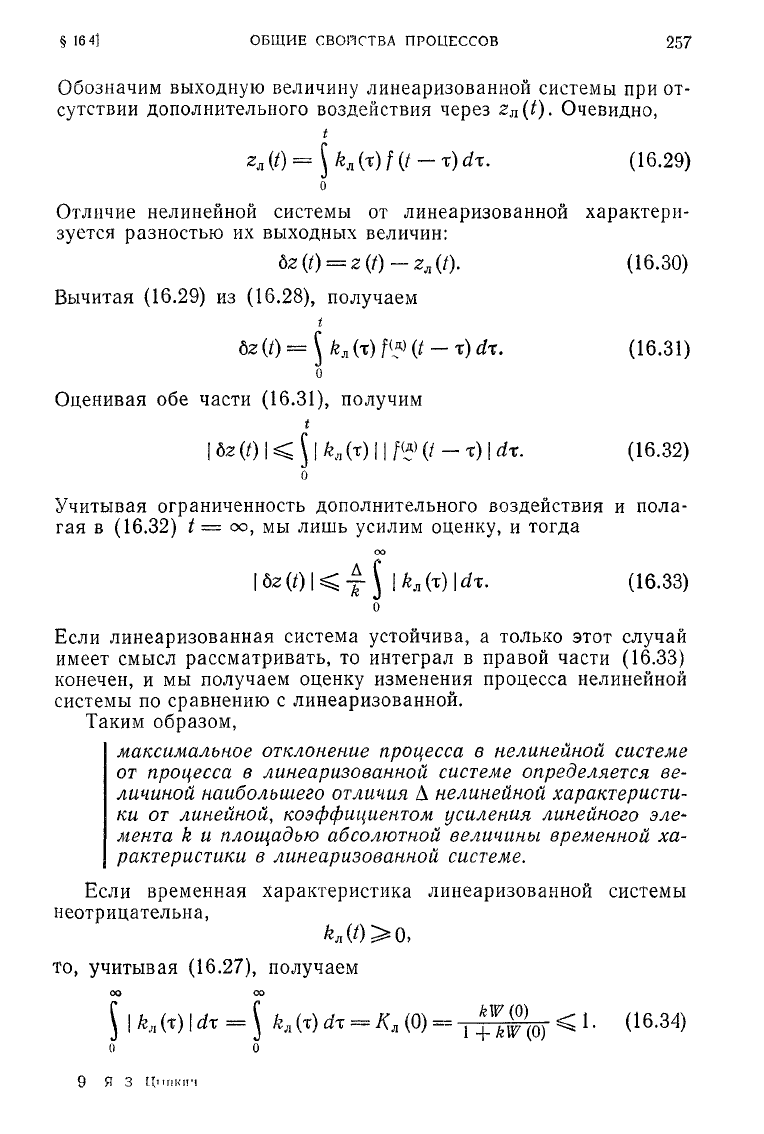
Рассмотрим теперь не-
линейные
системы при на-
личии насыщения у нели-
нейных элементов. В этом
случае
(рис.
16.7) функ-
ция
Ф(х),
определяющая нелинейность в системе, является огра-
ниченной,
т. е.
|Ф(*)КФ««<°о.
(16.36)
Коэффициенты
линеаризации нелинейного элемента удовлетво-
ряют условиям
lim
№{x)^=
tim
-^-
=
0,
(16.37)
Х
(16.38)
Производя
оценку левой части уравнения нелинейной системы
(16.8) с учетом (16.36), получим
lim
=
lim
d
®
{x)
=0.
(16.39)
Заменяя
сумму абсолютных значений воздействий их верхней
границей и замечая, что для устойчивой линейной части
\d%
(16.40)
получим
(16.41)
Отсюда следует, что в нелинейных системах
при наличии
насыщения
нелинейного
элемента
с
устойчи-
вой
линейной
частью
и
ограниченных
воздействиях
про-
цессы
всегда
ограничены.
ЗАДАЧИ
259
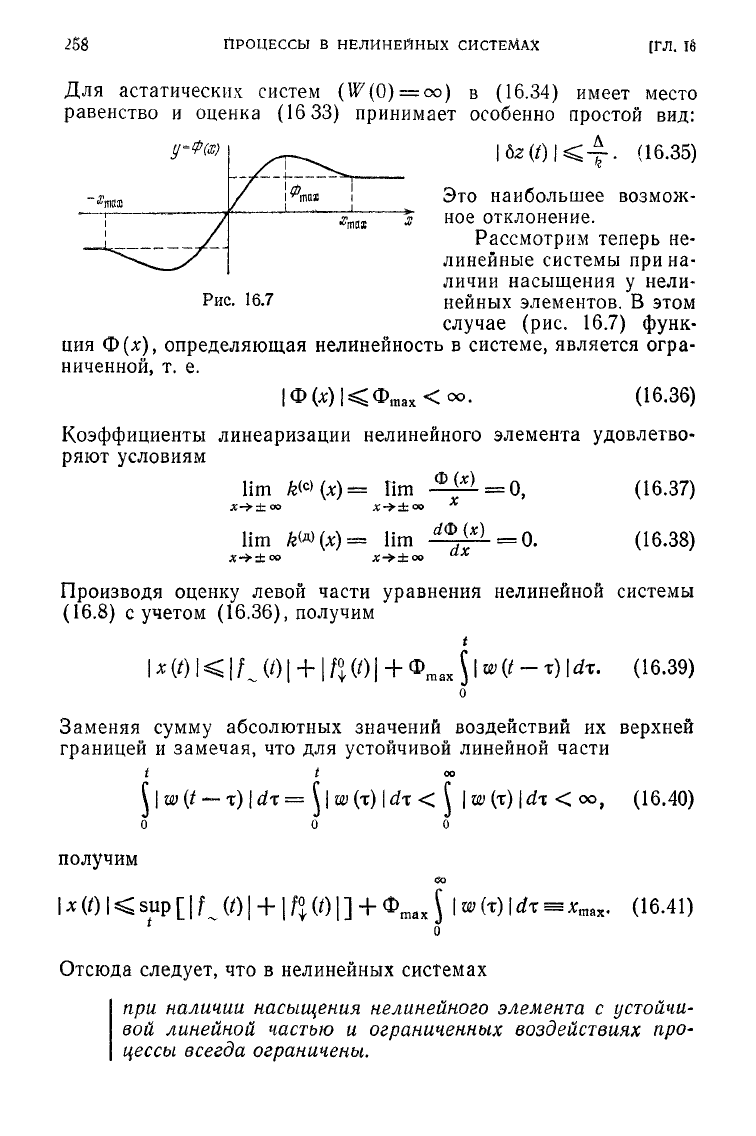
Поэтому рабочий участок характеристики нелинейного элемен-
та определяется величиной
можность линеаризовать не-
линейный
элемент несколь-
ко
иначе, чем мы делали вы-
ше.
Выберем коэффициент
усиления линейного элемен-
та так, чтобы наибольшие
отклонения
А при х =
л:
тах
и
при некотором х внутри
интервала
(—x
m
ax,
*тах)
бы-
ли
бы равны по абсолютной
величине (рис. 16.8). Тогда
в
интервале
(—х
т
&
х
,
х
тах
)
справедливо
будет
равенство
(16.25)
и неравенство (16.26). Проводя для этого случая рас-
суждения, подобные изложенным выше, мы получим оценку
(16.42)
*max
(рИС.
Г
1
16.
1
8).
/
Это
дает
воз-
у
г*****-—•
i
i
!
max
&
Рис
16.8.
-f
\
\w{x)\dx.
Естественно, теперь величина А зависит от
д?
т
ах.
Эти простые
оценки
позволяют в ряде случаев составить представление о ха-
рактере процессов в нелинейных системах.
Задачи
16.1.
Показать эквивалентность уравнений вынужденных процессов
х*
(t)
==
f ^ (t) - [ w (x)
x
B
(t — т) dx
где временные характеристики замкнутой и разомкнутой систем связаны соот-
ношением
оо
k
(t) = б
(0
-
[
w (х)
k(t-x)
dx
о
16.2. Привести примеры характеристик нелинейных элементов, не
удовле-
творяющих условиям (16 26).
16.3. Привести примеры характеристик нелинейных элементов, не
удовле-
творяющих
одному из условий (16.37), (16.38).
9*
Глава
17
УСТОЙЧИВОСТЬ
НЕЛИНЕЙНЫХ
СИСТЕМ
§
17.1.
Понятия
устойчивости
Состояние
равновесия, вынужденные процессы, автоколеба-
ния
могут
реально существовать лишь в том случае, когда они
устойчивы. Устойчивость этих режимов определяется характером
изменений
отклонений, вызванных приложением к системе убы-
вающих воздействий. Если эти отклонения стремятся с течением
времени к нулю, то соответствующие режимы устойчивы. Возни-
кающие отклонения представляют собой не что иное, как сво-
бодные процессы. Поэтому исследование устойчивости сводится
к
исследованию свободных процессов. В отличие от линейных
систем, в нелинейных системах свободный процесс существенно
зависит от рассматриваемых режимов. В нелинейных системах
возможны ситуации, в которых один режим устойчив,
тогда
как
другой
режим неустойчив. Так, при устойчивых автоколебаниях
часто состояние равновесия неустойчиво. Поэтому устойчивость
состояния
равновесия, вынужденных процессов и
автокочебаний
следует
рассматривать, вообще говоря, раздельно. В
эгой
главе
мы
будем
рассматривать устойчивость состояния равновесия и
устойчивость вынужденных процессов. Исследованию автоколе-
баний
и их устойчивости
будет
посвящена гл. 20.
Известны
различные понятия устойчивости положения равно-
весия
процессов. Нам удобно
будет
использовать понятия устой-
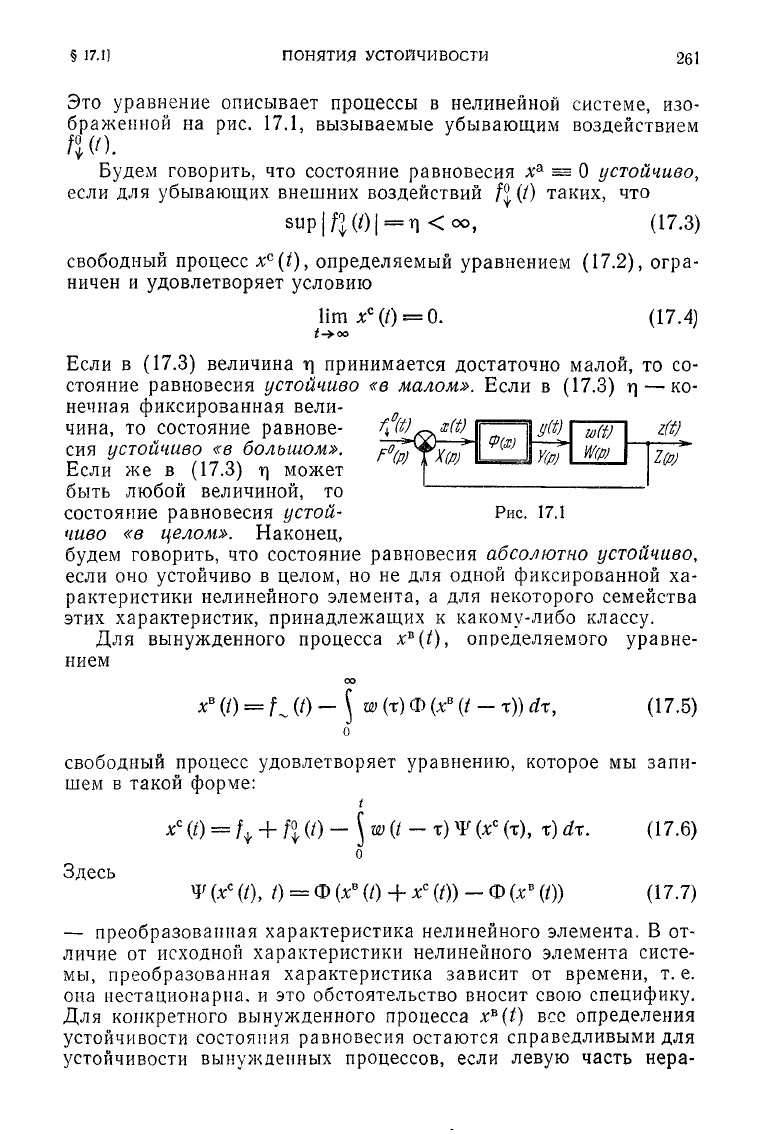
чивости, основанные на понятии свободного процесса. Рассмо-
трим
схему
нелинейной автоматической системы (рис. 17.1). Она
описывается уравнением (16.1). Для состояния равновесия
х
Ц()
=
х
в
=
х
а
=
0
(17.1)
уравнение свободного процесса принимает вид
t
*
с
(/) =
f\
(0 -
\w
(t -
т)
Ф
(x
c
(T))
dr.
(17.2)
§
17.1]
понятия
УСТОЙЧИВОСТИ
261
Это уравнение описывает процессы в нелинейной системе, изо-
браженной на рис, 17.1, вызываемые убывающим воздействием
fl
С).
Будем говорить, что состояние равновесия
х
а
z=~
О
устойчиво,
если для убывающих внешних воздействий
/?
(/) таких, что
|^(/)|
=
ii<oo,
(17.3)
l(t)
свободный процесс
x
G
(t),
определяемый уравнением (17.2), огра-
ничен
и удовлетворяет условию
lim
x
c
(/)
=
0.
(17.4)
Если
в
(17.3)
величина т] принимается достаточно малой, то со-
стояние
равновесия
устойчиво
«в
малом».
Если в
(17.3)
ц
—
ко-
нечная
фиксированная вели-
чина,
то состояние равнове-
сия
устойчиво
«в
большом».
Если
же в
(17.3)
ц
может
быть любой величиной, то
состояние равновесия
устой-
Рис.
17.1
чиво
«в
целом».
Наконец,
будем
говорить, что состояние равновесия
абсолютно
устойчиво,
если оно устойчиво в целом, но не для одной фиксированной ха-
рактеристики нелинейного элемента, а для некоторого семейства
этих характеристик, принадлежащих к какому-либо классу.
Для вынужденного процесса
x
B
(t),
определяемого уравне-
нием
(0
=
МО
-
*)
ф
(*
в
(*
~
(17.5)
свободный процесс удовлетворяет уравнению, которое мы запи-
шем в такой форме:
t
(t)
=
-
x)
У
(х
с
(т),
T)
dx.
(17.6)
Здесь
W
(x
c
(/), /) = Ф
(x«
(/) +
x
c
(/))
-
Ф
(x*
(/))
(17.7)
— преобразованная характеристика нелинейного элемента. В от-
личие от исходной характеристики нелинейного элемента систе-
мы,
преобразованная характеристика зависит от времени, т. е.
она
нестационарна, и это обстоятельство вносит свою специфику.
Для конкретного вынужденного процесса
x
B
(t)
все определения
устойчивости состояния равновесия остаются справедливыми для
устойчивости вынужденных процессов, если
левую
часть
нера-