Bemelmans J. et. al. (editor) Elliptic and Parabolic Problems: Rolduc and Gaeta 2001
Подождите немного. Документ загружается.

220
3.
Explicit computations are carried out.
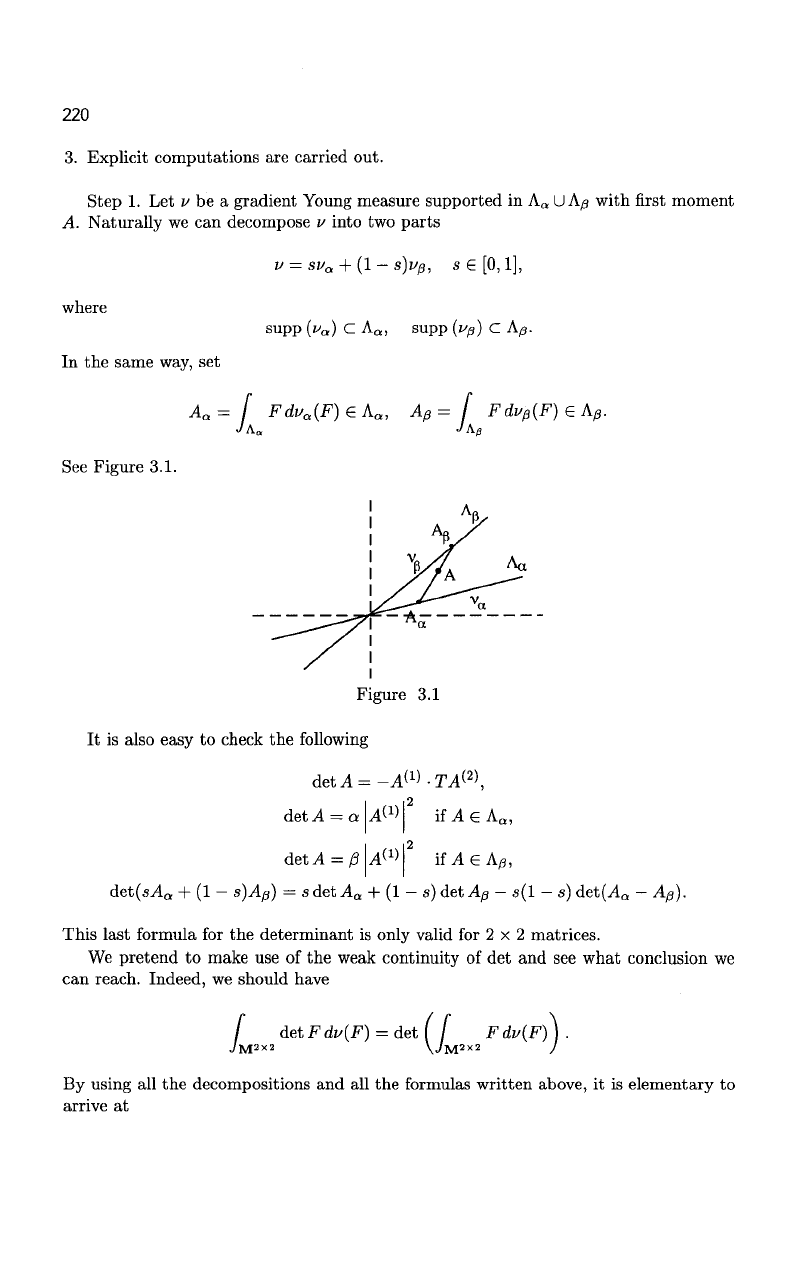
Step 1. Let v be a gradient Young measure supported in A
a
U
A^ with first moment
A.
Naturally we can decompose v into two parts
v = sv
a
+ (1 - s)up, s €
[0,1],
where
supp (v
a
) C A
Q
, supp (up) C Ap.
In the same way, set
A
a
=
f Fdu
a
{F)eA
a
, Ap= f FdvpWeAp.
See Figure 3.1.
Figure 3.1
It is also easy to check the following
det A
=-A&-TAW,
i i
2
deti4 = aA(
1
) if,4eA
a
,
det
J
4 = /9U
(1)
| ifAeA^,
det(sj4
a
+ (1 - s)Ap)
—
sdetA
a
+ (1 - s)detAp - s(l - s)det(^4
Q
- Ap).
This last formula for the determinant is only valid for 2 x 2 matrices.
We pretend to make use of the weak continuity of det and see what conclusion we
can reach. Indeed, we should have
f detFdv(F) = det ( / Fdv(F)) .
JM
2
" VM"
2
/
By using all the decompositions and all the formulas written above, it is elementary to
arrive at
221
as j \FW\
2
dv
a
(F) +/3(1 - s) f \FW\
2
dv
0
(F)
as
2
f F^du
a
(F) +P(l-s) [ F^dvp(F)
JA
a
JAff
- s(l - s) det(j4
a
- Ap
By Jensen's inequality, we conclude
det(A
a
- Ap) < 0.
On the other hand, the objective functional for our initial optimization problem can be
rewritten, based on the preceding decomposition for our feasible probability measures,
as
tf \xW\
2
dv
a
(X) + {l-t) f \xW\
2
dvp(X),
and, once again by using Jensen's inequality, a lower bound for this expresion is
t\A^\
2
+
(l-t)\A^\\
Therefore the optimization problem
i i2 i |2
Minimize t \A^ + (1 - t) U£°
where t, A
a
and Ap are constrained by
A = tA
a
+ (l- t)A
p
, A
a
e A
a
, Ap e Ap, t e [0,1]
det(A
a
- Ap) < 0,
will provide a lower bound for QW(A).
Step 2. Notice that the objective functional, under these constraints, can be written
1
.(Dl
2
t\A^\
+(l-t)|4
ibout the optimizatioi
12 ii
Minimize tlA^l + (1 - t) Ui
1
'
so that we will be concerned about the optimization problem
|2 | ,,,i2
subject to
A = tA
a
+ (l- i)Ap, A
a
£A
a
,Ap£Ap,te [0,1]
det(A
a
- Ap) < 0.
222
By writing
Aa=
{aTz)'
Af3=
\/3Tw)
for certain vectors z, w,
it
is elementary to find
*=^K
,+
™
(a,
)«
ic=
—
l
—(aAW+TA^\.
\—ta—p\
I
For simplicity, let us put
A
1
=
j-^
(HAM + TA&)
, A
2
=
-i^ (aA*
1
)
+
TA<
2
))
.
Then we can rewrite the above optimization problem in the following terms
•>
1 •> 1
Minimize
|Ai| - +
|4
2
|
subject to
'
2
a
4-14
I
2
^ 4 A
a +
>
?+l^l ^3-Al-Aa^—
1)
te(0,l),
lAxl^
+
IAal
2
—^-Ai-Aa^^^O.
Notice that this last expression is precisely det(j4
a
—
Ag) and that the vectors
Ai
and
Ai are constant. Put, for future reference
Since the objective function for this new formulation is convex in
t, it
tends to +oo as
t
—>
0
+
and
t
—¥ 1~, and the function determining the constraint
is
continuous, the
minimum value sought will correspond to equality in the restriction, provided the point
of absolute minimum of the objective function on the whole interval (0,1), to, is such
that
This is indeed an elementary calculus exercise. Since
\Ai\
to
—
\Ai\ + \A
2
\'
the previous expression simplifies to
(a + P) {\A
X
\ +
\A
2
\f (l - ^
. ji?_) > o.
(3.1)
223
Note that A* cannot vanish unless A £ A„
U
A^.
We conclude that if v is a gradient Young measure supported in the set where Wo
is finite and having first moment A, then we have
(W,v) >minimi
2
i + |A
2
|
2
~ :
<p{t)
< o}
= min||^
1
|
2
i
+
|^
2
|
2
T
l
7
:^(i)=o}
>QW{A).
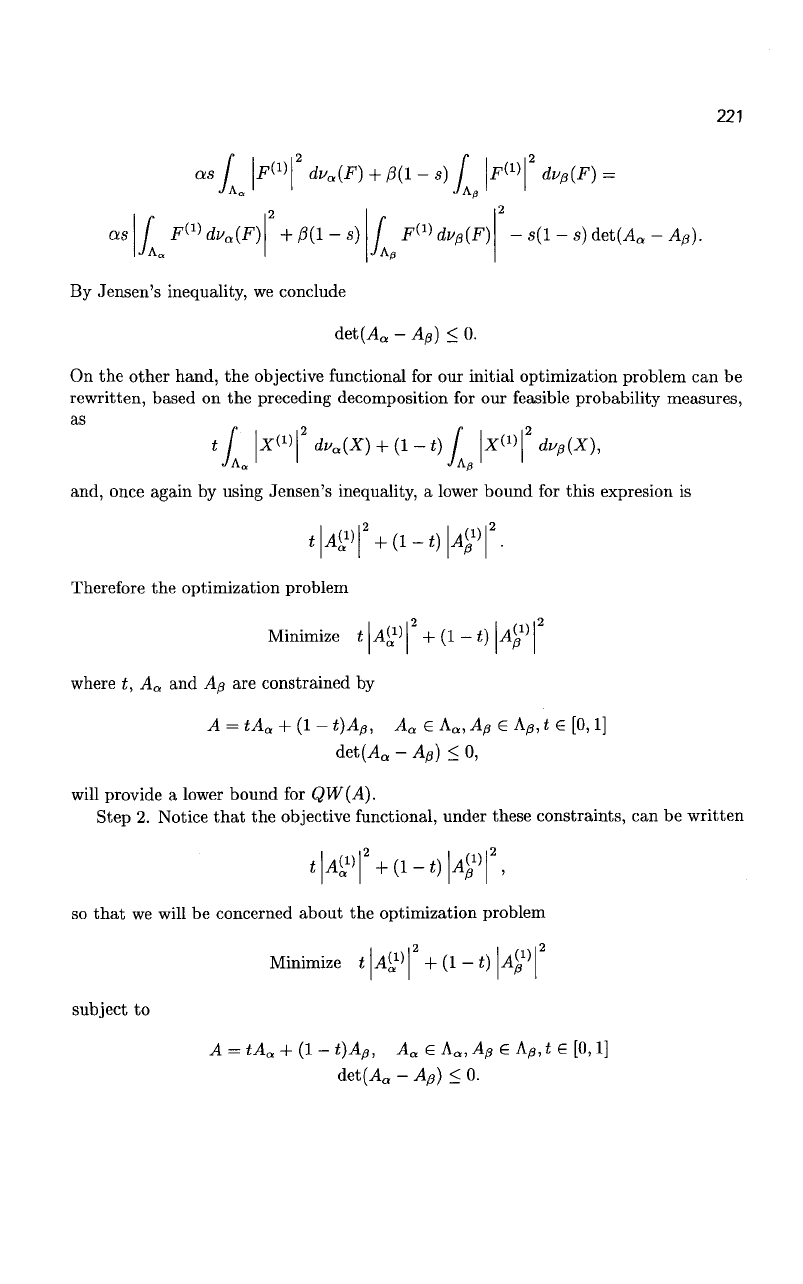
The last inequality is correct because when ip(t) = 0 we obtain a first-order laminate.
By taking the infimum in v we get
QW(A) = nun 11Ai|
a
\ + \A
2
\
2
~ :
<p{t)
= oj .
Notice how first order laminates are the only possibility for which we can have equality.
Figure 3.1
Step 3. Computation of the previous minimum. The equation ip(t) = 0 is quadratic
in t. Indeed, it can be rewritten as
a(l - i)
2
|7li|
2
+ fit
2
\A
2
\
2
- (a + )3)i(l - t)A
x
•
A
2
= 0.
(3.2)
The value of this parabola for t = 0 and t = 1 is positive if A does not belong to either
A
a
or A/3. In order for this quadratic equation to have real roots in the interval (0,1),
we need to demand the discriminant to be non-negative, the leading coefficient to be
(strictly) positive and the vertex to belong to (0,1). After a few computations we also
have
[a
]^!|
2
+ 0 \A
2
\
2
+ {a + p)A!
•
A
2
) t
2
- (2a [A^
2
+ (a + P)A
X
•
A
2
) t
+a|A
1
|
2
= 0;
224
or even further, bearing in mind the expressions for the vectors Ai and A2,
detA t
2
- ^— (ap U
(1)
|
2
- U
(2)
|
2
+ {P-a) det/) t
+ -—^—^ (aP
2
\A^\
2
+
a\A^\
2
-
2aPdetA]
=0.
(p-ay \ 1 \ 11 /
Those three conditions mentioned above amount to
|2
0(^4) >0, (a + P) det
,4
>
*/3
U^ -
U<
2
>
After some algebra, it is elementary to show that these two conditions together are
equivalent to the ones defining the set T of the statement of Theorem 3.1. Notice that
the equality h(A) = 0 must be allowed to incorporate matrices on A
a
and A/3. For a
matrix not belonging to T, the quasiconvexification will be infinite.
We need to clarify which one of the two roots of the above quadratic equation we are
interested in. We know, to begin with, that the point of minimum to is either to the right
or to the left of the interval determined by the those two roots. By elementary continuity
arguments, it will always be to the same side provided that to is never the vertex of the
quadratic equation. This possibility can only happen if, in addition, because of (3.1),
A
1
-A
2
= \A
1
\ \A
2
\.
Having this in mind, equating the vertex of the parabola with to leads to the equation
lax
1
+ (a + P)xy _ x
lax
1
+ 2(a + P)xy + 2Py
2
~ x + y'
where
x = \A
x
\, y = \A
2
\.
It is elementary to check that that equation can never hold. In fact what is always true
is
2ax
2
+ (a + P)xy x
<
2ax
2
+ 2(a + P)xy + 2Py
2
x + y
and this in turn, implies that the largest root is the one we are interested in (see Figure
3.2). After some computations, it has the form given in the statement of the theorem.
For the value of the minimum
itself,
we are in need of calculating
IVT + I^I
2
1
t ' ' i-t'
precisely for this value of t. Notice that if t is a root of at
2
+ bt + c = 0 so that
—6
+ v b
2
—
4ac
t=
2a '
225
then
1 _ -6 + \/b
2
- 4ac
t~ 2c '
because 1/t is a root of the equation a + bs + cs
2
= 0. On the other hand, (3.2) is
invariant when changing t by 1
—
t, a to P and Ax to A
2
, so that 1/(1
—
i) has the same
expression as 1/i but changing a to /3 and Ax to A^- After some careful arithmetic the
expresion on the statement of the theorem is obtained.
4.
Some more general situations
If we review the key facts on the previous proof with the objective in mind of specifying
more general situations where similar computations could be carried out, we imme-
diately isolate the main ingredients needed. Indeed, even with the most general cost
functional we can provide some definite results.
For the characteristic function X °f
a
simply-connected domain in R
2
, we consider
a cost functional
I(x)= / i>(x,x(x)a+{l-x{x))P,u{x),Vu{x))dx
where
div ((a
X
(x) + 0(1 -
X
(x))) Vu(z)) = /(*), in fi,
u = uo on 8Q.
For simplicity we take / = 0, so that the auxiliary function V vanishes identically in
f2.
We are interested in minimizing I(x) among the class of all characteristic functions
over Q,.
Because of the nature of characteristic functions, we can rewrite the cost funcional
as
!{x) = / {xi.x)ip
a
{x,u{x),Vu{x)) + (l-x{x))ip0{x,u{x),Vu(x))}dx
where
ip
a
(x, u, Vw) = ip(x, a, u, Vu)
and the same for
tpp-
It is straightforward to check that our new optimal design problem
is equivalent to the variational problem
Minimize I{U) = [ W(x,U{x),VU{x))dx
where
UeH
1
^),
U
w
= u
Q
ondfi,
226
and the density W is given by
W(x, U,A)=
<
' xp
a
(x, UW,AM), if aAW + TAW = o,
rl)p{x,U^\AW)
t
XPAM+TAM = 0,
min {ip
a
(x, U^\ 0), ip
0
{x,
U<-
1
\
o)} , if A = 0,
+oo,
else.
The same analysis leads to the following result. Again for the sake of simplicity,
we drop the (x,u) dependence of tp
a
and ijjp, although this more general case is also
covered by the following computations. The set F is the same as in the statement of
Theorem 3.1. We also let Ti(A), i = 1,2, be the two roots of the quadratic equation
(3.1) for AeT, i.e.
n(A) = - +
2 2(0-a)detA
*P\AW\
- U
(2)
-\/<?P)
r
2
(A)
+
*P\AW\ -U
(2)
+\/<P)
2 2(j3-a)detA
Finally the matrices At, i = 1,2, are
Al
= -i- (PAW + TAW) , A
2
= ^i- (a^
1
) + TAW)
Theorem 4.1 Assume that
1.
the functions
4(v«), ^(Vu)
are non-neg'atjVe and convex on Vu;
2.
for all AeT, the functions
9A(t) = tip
a
(jAij + (1 - t) fa (rzr^ , t e (0,1),
are such that
Then
min <M(£) = min 94 ft).
te[ri(A),r2(A))
a
t6{ri(A),r
2
(vl)}
l+oo,
(4.1)
iA
^» (OT^
1
)
+
(1
~
n{m
*
(r^W
2
)
}'
itA
G
r
'
else.
In addition, if either ip
a
and ipp are strictly convex, or the minimum in (4.1) is only
attained at one of the end-points of
[ri
(A), r
2
(A)] then the only optimal microstructures
are first order laminates.
227
Notice that
the
hypotheses
on the
functions
gA(t) are
valid when either
QA(t) is
concave
or
when
it is
monotone (either increasing
or
decreasing) over
the
interval
[ri(A),r
2
(A)).
It
is
interesting
to
look
at
some other particular examples where these hypotheses
hold.
We
will always take
ip
a
= ipp = tp and
focus
on the
situation where
ip
only
depends upon
Vu and it is
homogeneous
of
degree
p, p > 0.
Thus
the
functions
<?AM
can
be
rewritten
as
g
A
(t)
= t
1
-*^) + (1 -
t)
l
-Pi>(A
2
).
If
0 < p < 1
these functions
are
concave
so
that,
if
ip
is
convex,
we can
apply Theo-
rem
5.1, to
obtain
the
appropriate quasiconvexincation.
For
example,
for p = 0 and
overlooking
the
difficulty appearing because
of the
singularity
at the
origin,
we get
f
4>(A
2
)
+ n(A)
(V(A0
-
4>{A
2
)),
if A e T and ^(Aj) >
f(A
2
),
QW(A)
= \
j,(A
3
)
+ r
2
(A)
(V»(Ai)
-
V(4»)),
if A e T and ^(A
1
) <
f(A
2
),
{ +00,
if A
<£
T.
For
p = 1,
curiously enough
we
obtain
QW(A)
= i,{AJ +
i,(A
2
)
if
A e T. For p > 1, the
functions
<7A(*)
are now
convex,
and the
further requirement
V-(^i)
1/p
V(^i)
1/P
+
^
2
)
1/P
must
be
enforced. When this
is the
case
£ (
ri
(A),r
2
(A))
QW{A)
n^-Wi)
+
(1
-nCA))
1
"^^), if ,,,,
XPT/M
W* ^
ri
^'
y>(^i)
1/p
r
2
(A)^-P^(A0
+ (1 -
r
2
(A)y-^(A
2
),
if ^^^i^ >
r
2
(A),
for A
e r.
Further details
can be
found
in [2].
5.
Relaxation under volume constraint
As pointed
out, we
would like
to
concentrate
on how
things change
in the
presence
of
an integral constraint
as the one we
have
in our
equivalent variational problem. Indeed,
and again overlooking technical issues concerning
the
lack
of
continuity,
the
appropriate
convex hull
is
CQW(A,
t)
= inf | j^-J W(A
+ V<p(x))dx :
ip
€W^°°(D),
[
V(A +
Vip(x))dx
= t\D\\ .
228
This was studied in [14] and, independently, in [9]. If we envision a relaxation result,
the relaxed problem will have integrand CQW(A,i) depending on gradient and local
volume fraction. In order for this relaxed variational principle to be relevant we need
to know that it admits optimal solutions, and this in turn, involves the appropriate
convexity conditions. What are these for a functional depending on gradient A and
some other parameter 4? The answer was given with D. Kinderlehrer in [5] motivated
by a completely different problem. In general terms, a function ^(A,t) ought to satisfy
the "joint convexity property"
*(A,t) <
yjj-
J *{A
+
V
v
{x),i+0(x))dx,
<p
e W
0
1,oo
(£>), 9eL°°(D), f 6(x) dx = 0,
JD
for the corresponding variational principle to be lower semicontinuous with respect to
weak convergence. What is interesting is that the functional CQW(A,t) coming from
the relaxation of a variational problem under integral constraints does enjoy this joint
convexity property ([14]). As a main consequence, the whole relaxation framework is
valid for our initial design problem, and microstructures and microgeometries for the
original optimal design problem can be understood via relaxation. In fact the following
relaxation result is true under typical technical assumptions which we overlook here.
Theorem 5.1
inf I f W(VU(x)) dx:Ue
H
x
{n),
C/
(1)
= u
0
on dU, f V{VV(x)) dx = \\ =
min I f CQW(VU(x), t(x)) dx
:
U 6 #*(«), U
m
=
M
0
on 80,,
0<t(x) < 1, / t(x)dx = X>.
As is usual in the well-known non-convex variational scenario, the relaxed integrand
CQW(A,
t) locally encodes the information on optimal microstructures and microge-
ometries. What is rather remarkable is that CQW(A,t) can be explicitly computed for
our equivalent variational problem.
The following formulas are given for the purpose of completeness. They appear in
the explicit form of the relaxed integrand CQW(A,t):
g{A) =
a
2
/3
2
U
(1)
I*
+ I
A<
2
>
I*
+ (a
2
+ 6a/3 + /3
2
) det A
2
- 2a/3 \A^\
2
U<
2
>| - 2a/3(a +
/3)
\A^\
2
det A- 2(a +
/3)
U^f det A,
n(A)
1 1
2 2{/3-a)detA
1 1
V2( ]
~ 2
+
2(/3-a)det
J
4
U(D _ U<
2
) -JKA)
1/3AW - U
(2)
+Vg(A)
229
,
*
+
3-
_(l-r
i
(A))[t(l-r
j
(A))-a-t)r
j
(A)}
t{l-
rj
(A))-(l-Ti{A))
ri
(A)
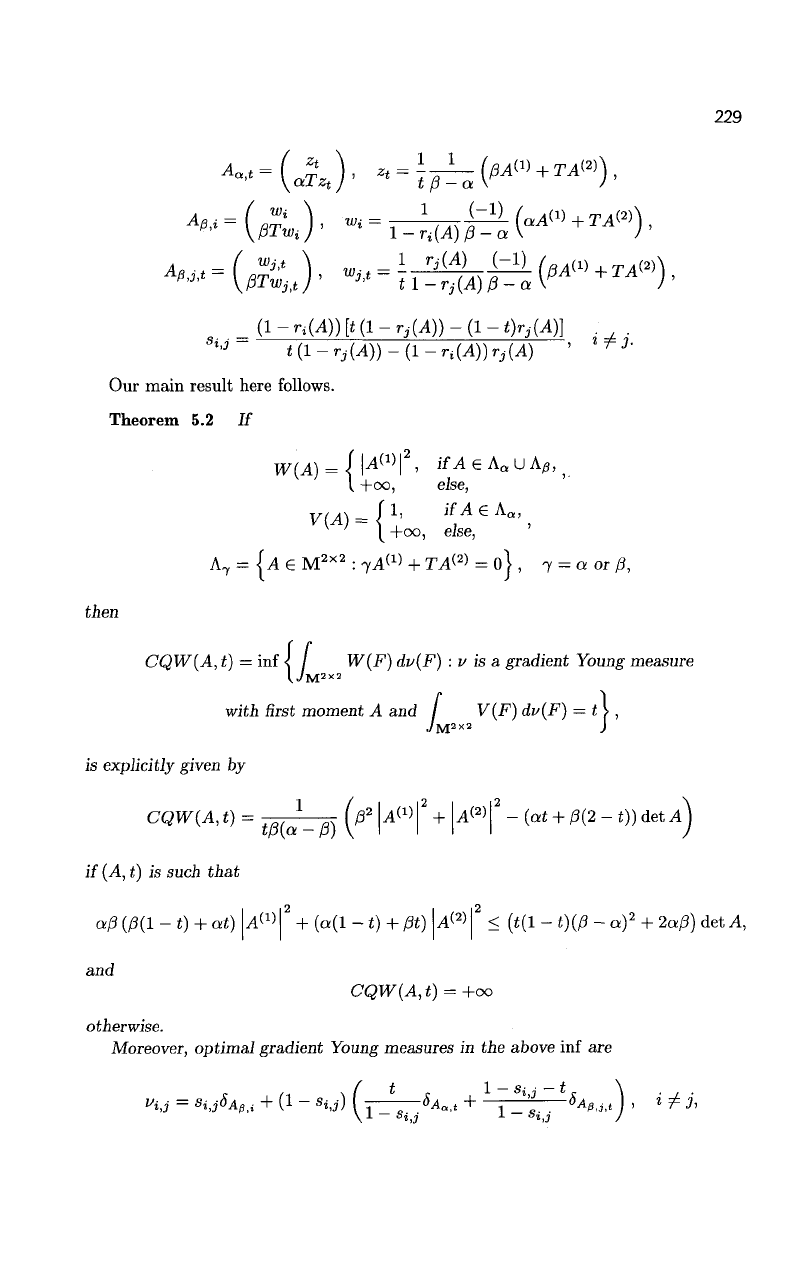
Our main result here follows.
Theorem
5.2 If
W(A)
= {\
Ail)
\
2
>
ifAeAaUAp,^
I
+oo,
eise,
A
7
= {A e
M
2
*
2
: -yA^ + TA™
=
0 j
,
7
=
aorft
then
CQW(A,
t)
=
inf
<
/
W(.F)
du(F)
:
v
is a
gradient Young measure
with first moment
A
and
/
V(F) dv(F)
= t \ ,
JM"
2
J
is explicitly given
by
CQW(A,t)=.
f)
.
1
..
(/3
2
\AW\
2
+
\AW\
2
-(at
+
(3(2-t))detA)
if
(A, t) is
such that
i
12 i 12
aP{P{l-t)+at)\A^\
+
(a(l
-
t) + /ft)
U<
2
>
<
(t(l
-
t)(/3
-
a)
2
+
2a£) det A,
and
CQW(A,t)
=
+oo
otherwise.
Moreover, optimal gradient Young measures
in the
above
inf are
Vi,j
=
SijdAd
+
(1
-
s*,i) ( z
—SA
a
,
t
+
—T^i Wi,t
J
.
*
+ 3,