Беляев Е.Ф., Шулаков Н.В., Дискретно-полевые модели электрических машин, учебное пособие
Подождите немного. Документ загружается.

ebr=ebr+e 1 (j)-e 1 (j+36)+e 1 (j+72)-e
1
(j+108);
end
for j=5:16
ecr=ecr-e 1 (j)+e 1 (j+36)-e 1 (j+72)+e
1
(j+108);
end
if ra==l
zll=eas/ias; z2i=ebs/ias; z31=ecs/ias; z41=ear/ias; z51=ebr/ias; z61=ecr/ias;
ias=0.; ibs=l.; ics=0.; iar=0.; ibr=0.; icr=0.;
end
if m==2
zl2=eas/ibs; z22=ebs/ibs; z32=ecs/ibs; z42=ear/ibs; z52=ebr/ibs; z62=ecr/ibs;
ias=0.; ibs=0.; ics=l.; iar=0.; ibr=0.; icr=0.;
end
if m==3
zl3=eas/ics; z23-ebs/ics; z33=ecs/ics; z43=ear/ics; z53=ebr/ics; z63=ecr/ics;
ias=0.; ibs=0.; ics=0.; iar=l.; ibr=0.; icr=0.;
end
if m==4
zl4=eas/iar; z24=ebs/iar; z34=ecs/iar; z44=ear/iar; z54=ebr/iar; z64=ecr/iar;
ias=0.; ibs=0.; ics=0.; iar=0.; ibr=l.; icr=0.;
end
if m==5
zl5=eas/ibr; z25=ebs/ibr; z35=ecs/ibr; z45=ear/ibr; z55=ebr/ibr; z65=ecr/ibr;
ias=0.; ibs=0.; ics=0.; iar=0.; ibr=0.; icr=l.;
end
if m=-6
zl6=eas/icr; z26=ebs/icr; z36=ecs/icr; z46=ear/icr; z56=ebr/icr; z66=ecr/icr;
aa( 1,1 )=z21 -z22-z 11+zl2+zsa+zsb; aa( 1,2)=z23-z22-z 13+z 12+zsb;
aa( 1,3)=z24-z25-z 14+z
15;
aa(l,4)=z26-z25-zl6+zl5;
aa(2,1 )=z21 -z22-z31+z32+zsb; aa(2,2)=z23-z22-z33+z32+zsb+zsc;
aa(2,3)=z24-z25-z34+z35; aa(2,4)=z26-z25-z36+z35;
aa(3,l)=z5 1-Z52-Z41+Z42; aa(3,2)=z53-z52-z43+z42;
aa(3,3)=z54-z55-z44+z45+zra+zrb+zna+znb; aa(3,4)=z56-z55-
z46+z45+zrb+znb;
aa(4,1 )=z51 -z52-z61 +z62; aa(4,2)=z53-z52-z63+z62;
aa(4,3)=z54-z55-z64+z65+zrb+znb; aa(4,4)=z56-z55-
z66+z65+zrb+zrc+znb+znc;
bb=zeros(4,l);
bb(l,l)=uab; bb(2,l)=ucb; bb(3,l)=0.; bb(4,l)=0.; xx=aa\bb;
ias=xx(l,l); ics=xx(2,l); ibs=-ias-ics; iar=xx(3,l); icr=xx(4,l); ibr=-iar-icr;
end
m=m+l;
end
ua=-eas+ias*zsa; ub=-ebs+ibs*zsb; uc=-ecs+ics*zsc; uwa=ear-iar*zra; uwb=ebr-
ibr*zrb;
uwc=ecr-icr*zrc; fis=angle(eas)*180./pi;
fir=-angle(uwa)* 180/pi; dfi=fis-fir;
fi0=fiO+36O./72.;
if mm==l
nl(nn)=180.*nn/72.; n2(nn)=dfi;
end
if mm==2
n3(nn)=dfi;
end
disp(fiO);
disp(dfi); nn=nn+l; nf=nf+l;
end
plot(n 1,2*n 1 ,n 1 ,n2,n 1 ,n3)
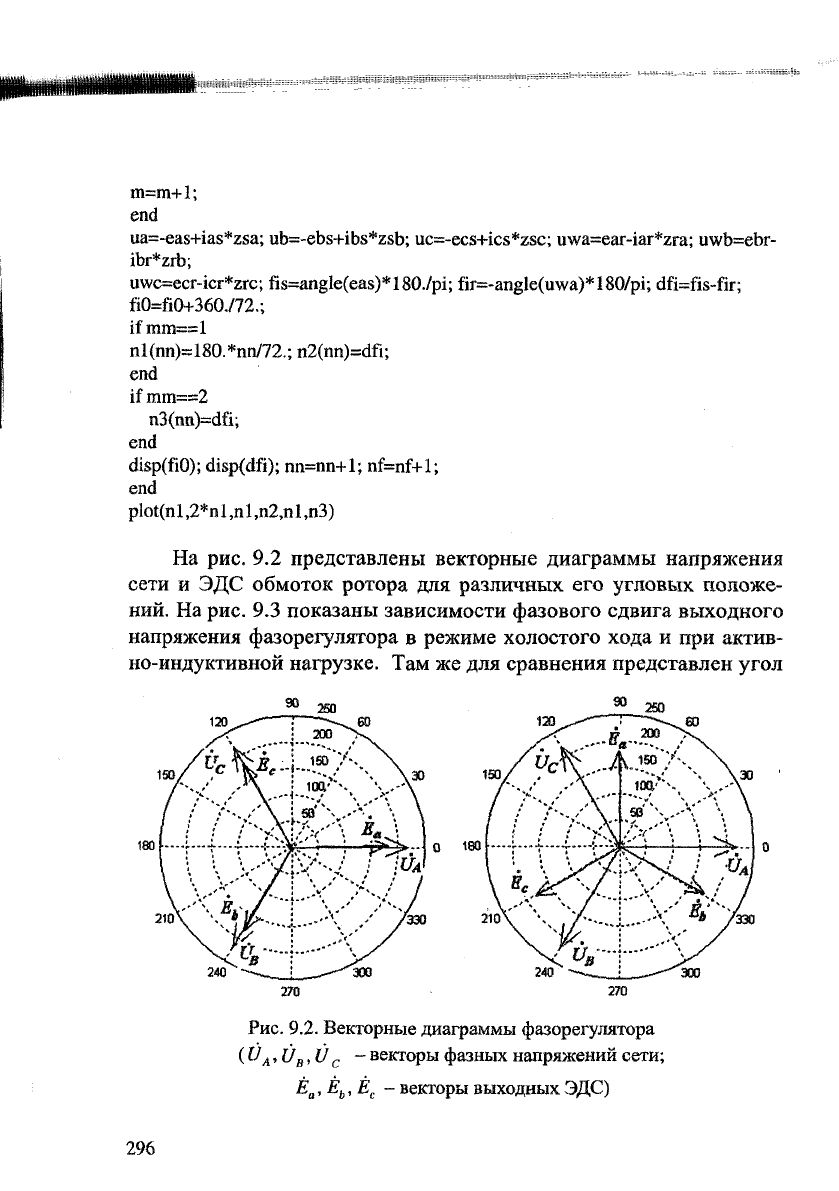
На рис. 9.2 представлены векторные диаграммы напряжения
сети и ЭДС обмоток ротора для различных его угловых положе-
ний. На рис. 9.3 показаны зависимости фазового сдвига выходного
напряжения фазорегулятора в режиме холостого хода и при актив-
но-индуктивной нагрузке. Там же для сравнения представлен угол
90
250
90
250
Рис. 9.2. Векторные диаграммы фазорегулятора
(U
A
,U
B
,U
с
- векторы фазных напряжений сети;
Ё
а
,Е
ь
,Е
с
- векторы выходных ЭДС)

^-''ЩШШМММШМММММММММНММЙШ
11
и I иг 11 iiiiiwimimwn(jMBi>miinmiww»i>i
Рис. 9.3. Зависимость фазы выходного напряжения фазорегулятора
от угла поворота ротора (1 - угол поворота ротора; 2 - режим
холостого хода; 3 - режим нагрузки)
поворота ротора в электрических градусах. Поскольку величина
сопротивлений обмоток фазорегулятора весьма незначительна, кри-
вые, изображённые на рисунке, практически не отличаются.
9.2.2. Индукционный регулятор
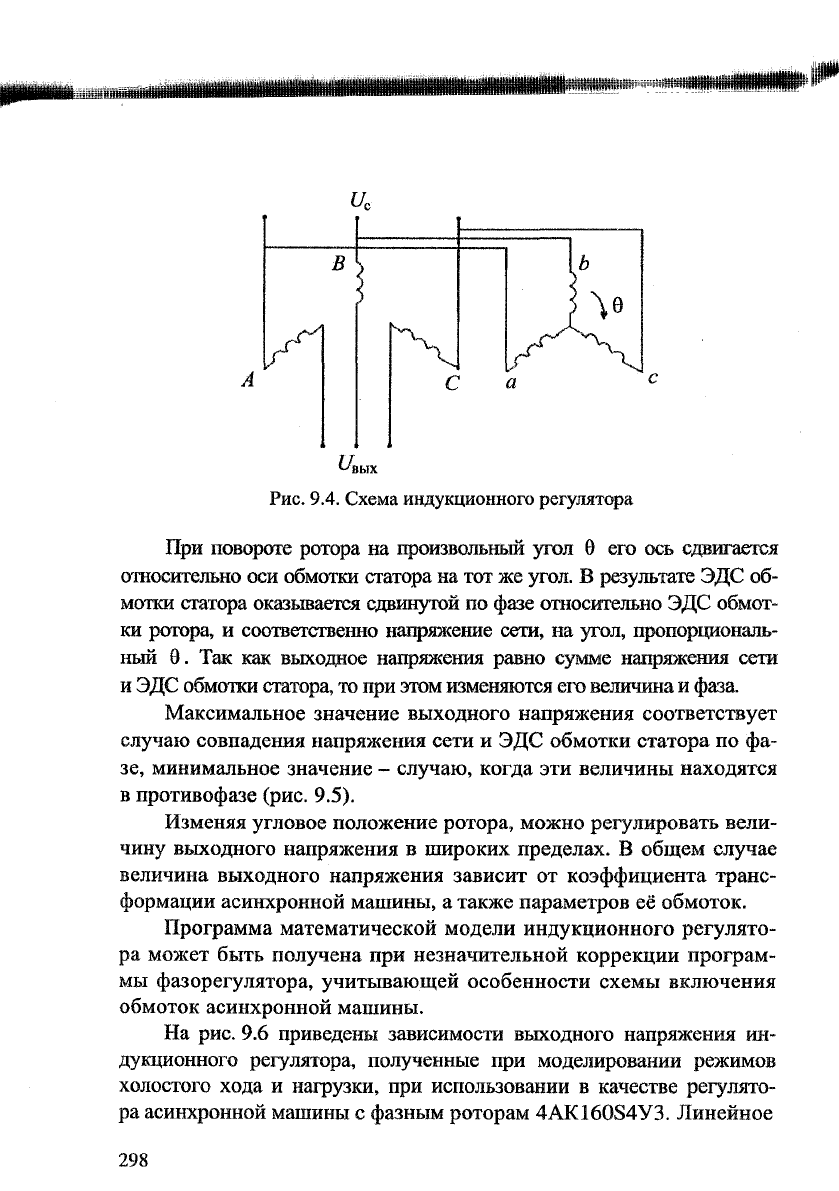
Индукционный регулятор (потенциал-регулятор) представляет
собой асинхронную машину с заторможенным ротором, обмотки
статора и ротора которой включены в сеть, а выходное напряжение
снимается с концов статорных обмоток (рис. 9.4).
В качестве сетевой чаще используется обмотка ротора, посколь-
ку при этом упрощается её подсоединение к сети. Под действием на-
пряжения сети в обмотке ротора протекает ток и в воздушном зазоре
создаётся вращающееся магнитное поле. Это поле наводит в обмотке
статора ЭДС, которая суммируясь с напряжением сети U
c
, образует
выходное напряжение U
Bm
.
А
г
в
X
С а
с
Ua ых
Рис. 9.4. Схема индукционного регулятора
При повороте ротора на произвольный угол 0 его ось сдвигается
относительно оси обмотки статора на тот же угол. В результате ЭДС об-
мотки статора оказывается сдвинутой по фазе относительно ЭДС обмот-
ки ротора, и соответственно напряжение сета, на угол, пропорциональ-
ный 8. Так как выходное напряжения равно сумме напряжения сети
и ЭДС обмотки статора, то при этом изменяются его величина и фаза.
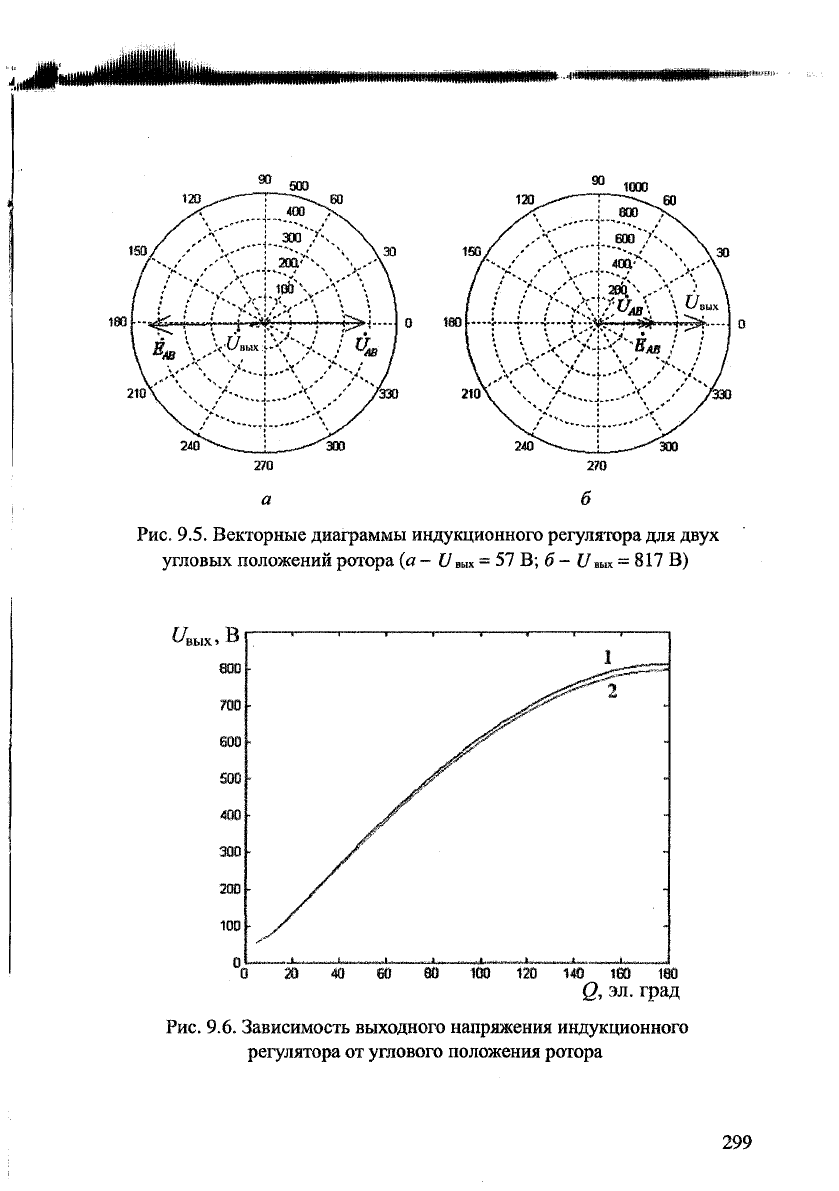
Максимальное значение выходного напряжения соответствует
случаю совпадения напряжения сети и ЭДС обмотки статора по фа-
зе, минимальное значение - случаю, когда эти величины находятся
в прогивофазе (рис. 9.5).
Изменяя угловое положение ротора, можно регулировать вели-
чину выходного напряжения в широких пределах. В общем случае
величина выходного напряжения зависит от коэффициента транс-
формации асинхронной машины, а также параметров её обмоток.
Программа математической модели индукционного регулято-
ра может быть получена при незначительной коррекции програм-
мы фазорегулятора, учитывающей особенности схемы включения
обмоток асинхронной машины.
На рис. 9.6 приведены зависимости выходного напряжения ин-
дукционного регулятора, полученные при моделировании режимов
холостого хода и нагрузки, при использовании в качестве регулято-
ра асинхронной машины с фазным роторам 4AK160S4Y3. Линейное
90
500
90
1000
а б
Рис. 9.5. Векторные диаграммы индукционного регулятора для двух
угловых положений ротора (а -
(У
вых
= 57 В; б - U
«их
- 817 В)
Рис. 9.6. Зависимость выходного напряжения индукционного
регулятора от углового положения ротора
напряжение сети при расчёте принято равным 380 В. Кривая 1 на этом
рисунке соответствует режиму, близкому к режиму холостого хода.
Сопротивление нагрузки в этом случае принималось равным К)
6
Ом.
Кривая 2 соответствует режиму нагрузки, близкому к номинальному,
когда сопротивление нагрузки Z
H
= (50 + 50/) Ом.
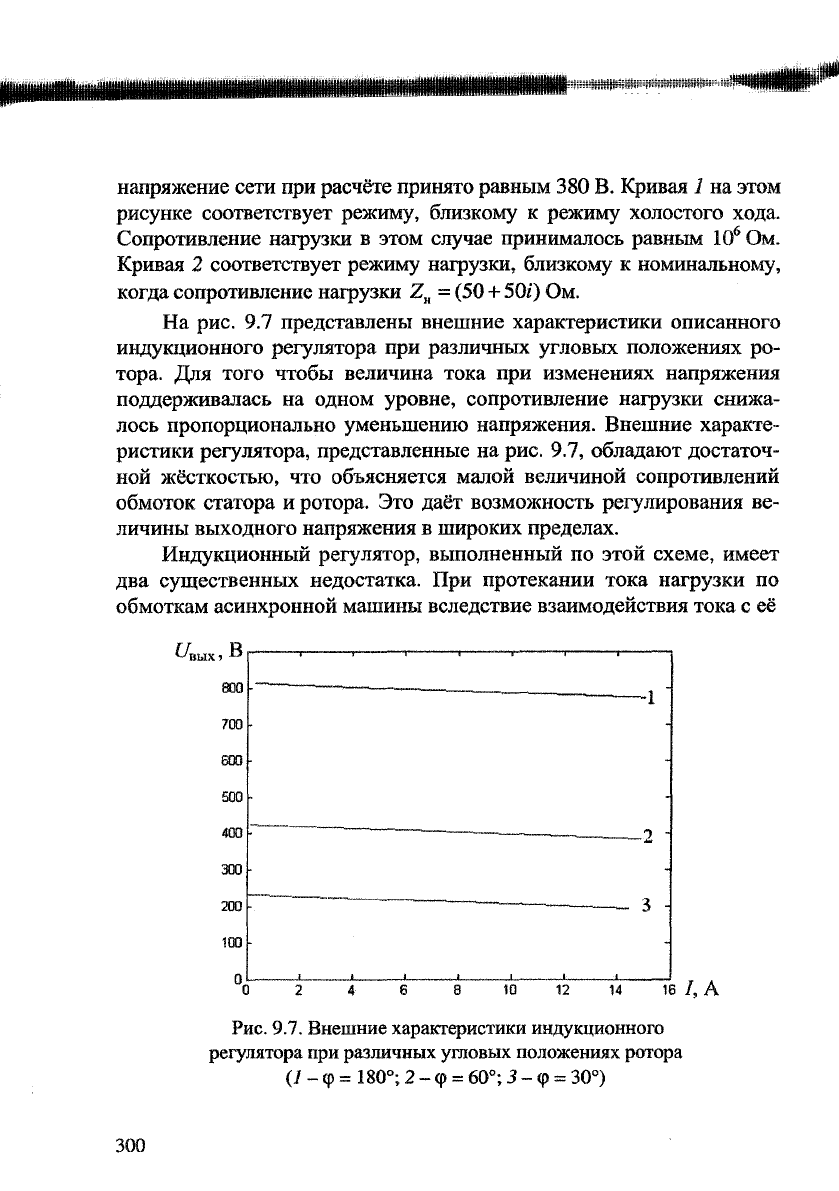
На рис. 9.7 представлены внешние характеристики описанного
индукционного регулятора при различных угловых положениях ро-
тора. Для того чтобы величина тока при изменениях напряжения
поддерживалась на одном уровне, сопротивление нагрузки снижа-
лось пропорционально уменьшению напряжения. Внешние характе-
ристики регулятора, представленные на рис. 9.7, обладают достаточ-
ной жёсткостью, что объясняется малой величиной сопротивлений
обмоток статора и ротора. Это даёт возможность регулирования ве-
личины выходного напряжения в широких пределах.
Индукционный регулятор, выполненный по этой схеме, имеет
два существенных недостатка. При протекании тока нагрузки по
обмоткам асинхронной машины вследствие взаимодействия тока с её
U В
ею
гоо
600
500
400
300
200
100
°0 2 4 6 8 10 12 14 16 I,
Рис. 9.7. Внешние характеристики индукционного
регулятора при различных угловых положениях ротора
(7 -
ф
=
180°;
2 -
ф
= 60°; 3 -
<р
= 30°)
i^'jiJfl
магнитным полем возникает вращающий момент, стремящийся по-
вернуть ротор. Поэтому при включении индукционного регулятора
с нагрузкой возникают динамические моменты, которые могут при-
вести к повреждению механической системы регулятора. Вторым
недостатком регулятора является изменение фазы выходного напря-
жения при регулировании величины напряжения. Такое положение
исключает возможность включения регулятора на параллельную рабо-
ту с другими источниками электрической энергии. Этих недостатков
лишён сдвоенный индукционный регулятор, имеющий в своём составе
две асинхронные машины с фазными роторами [2]. За счёт включения
обмоток статора и ротора, обеспечивающих противоположное на-
правление вращения их магнитных полей, одновременно устраняют-
ся оба недостатка. Для одинаковых асинхронных машин вращающие
моменты имеют противоположные направления и компенсируют
друг друга. При повороте роторов на один и тот же угол ЭДС обмо-
ток статора сдвигаются по фазе в противоположных направлениях.
Поэтому сумма их ЭДС, изменяясь по величине, всегда совпадает по
фазе с напряжением сети.
Программа математической модели сдвоенного индукционного
регулятора может быть легко построена путём незначительных из-
менений приведённой выше программы.
9.3. МОДЕЛИРОВАНИЕ РАБОЧЕГО РЕЖИМА
АСИНХРОННОГО ДВИГАТЕЛЯ С ФАЗНЫМ РОТОРОМ
На основе положений, рассмотренных в подразд. 9.1, разработа-
на программа расчёта рабочих характеристик асинхронного двигате-
ля с фазным ротором. Рабочий режим двигателя отличен от рассмот-
ренных ранее режимов тем, что под действием вращающего момента
ротор двигателя вращается с частотой несколько меньшей частоты
вращения магнитного поля, создаваемого обмотками статора и рото-
ра. При изменении частоты вращения изменяется величина ЭДС, ин-
дуцируемой в обмотках ротора, и, следовательно, величина тока ро-
тора. Таким образом, рабочие характеристики двигателя с фазным
ротором, так же как и короткозамкнутого, определяются его пара-
метрами и величиной скольжения.
В качестве примера использования математической модели при-
ведена программа расчёта рабочих характеристик асинхронного дви-
гателя с фазным ротором типа 4АК160М2УЗ [42], имеющего сле-
дующие параметры:
- число полюсов 2р = 4;
- число пазов статора Zs = 48;
- число пазов ротора ZR= 36;
- диаметр расточки статора D = 185 мм;
- наружный диаметр статора
D„
= 272 мм;
- длина магнитопровода статора L
s
= 180 мм;
- воздушный зазор 5 = 0,5 мм;
- высота зубца статора hzs = 20,5 мм;
- высота зубца ротора
h
Z
r<
= 28,3 мм;
- магнитная проницаемость ярма статора р
Л
. = 500р
о
;
- магнитная проницаемость ярма ротора р
д
= 350р
0
;
- ширина шлица статора b
mS
= 3,7 мм;
- ширина шлица ротора b
mR
= 3,7 мм;
- число витков обмотки статора
W
A
=
W
B
= 2Wc = 216;
- число витков обмотки ротора
W
a
-
W
b
=
W
c
=
96;
- линейное напряжение сети
U„ =
380 В;
- сопротивления обмоток статора
R
A
=
R
B
= Rc= 0,364 Ом;
- приведённое сопротивление ротора
R'
a
=R'
b
=
R'
= 0,332 Ом;
- индуктивные сопротивления обмоток статора Х
А
= ХД = ХС =
= 0,6486 Ом;
-приведённое индуктивное сопротивление обмотки ротора
Х'
а
=Х
Ь
=Х
С
= 0,806 Ом;
- обмотка статора: однослойная концентрическая, у = 10; обмо-
точный коэффициент К
о1
= 0,958;
- обмотка ротора: двухслойная петлевая равносекционная,
у =
7',
обмоточный коэффициент К
о2
= 0,902.
По заданным геометрическим размерам пазов статора и ротора
рассчитаем коэффициент Картера и величину приведённого воздуш-
ного зазора: 8'= 0,774 мм; коэффициент, учитывающий магнитное
сопротивление ферромагнитных участков магнитопровода: q = 254.
Программа расчёта рабочих характеристик асинхронного двига-
теля с фазным ротором:
n=144; del=0.774e-3; r0=92.25e-3; qq=254.0; hx=2.*pi/n; ws=4.5; wr=2.;
ls=0.18; pp=2.;
rs=0.362; xs-0.6486; rr=0.332; xr=0.806; s=0.0; om0=pi*100.; me=0.+ l.i;
dels=0.01; sig= 1.0237; nn=l;; mu0=4.*pi*l.e-7; uab=380.;
ucb=380.*(0.5+0.866i);
ds=mu0*ws*r0*hx/del; dr=mu0*wr*r0*hx/del; dl=me*omO*ls*ws;
d2=me*om0*ls*wr;
zsa=rs+me*xs+me*xr/sig; zsb=zsa; zsc=zsa; zra=rr; zrb=rr; zrc=rr;
while s<1.05
disp(s); om=om0*(l .-s)/pp; d3=om*ls*wr;
m=l;
ias=l.; ibs=0.; ics=0.; iar=0.; ibr=0.; icr=0.;
while m<8
fl(l:n)= 0.; f2(l:n)=0.; f3(l:n)=0.; f(l:n)=0.0;
fl(l:12)=ias; fl(13:24)=-ics; fl(25:36)=ibs; fl(37:48)=-ias; fl(49:60)=ics;
fl(61:72)=-ibs;
f2(l:12)=iar; f2(13:24)=-icr; f2(25:36)=ibr; f2(37:48)=-iar; f2(49:60)=icr;
f2(61:72)=-ibr;
for j= 1:72
fl(j+72)=fl(j); f2(j+72)=f2(j);
end
f3( 1:4)=iar; f3(5:16)=-icr; f3(17:28)=ibr; f3(29:40)=-iar; f3(41:52)=icr;
f3(53:64)=-ibr;
f3(65:76)=iar; f3(77:88)=-icr; f3(89:100)=ibr; 13(101:112)=-iar; f3(113:124)=icr;
f3(125:136)=-ibr; f3(137:144)=iar;
a(l:n)=l.; bl:n)=l.; c(l:n)=2.+qq*r0
A
2*hx
A
2;
f( l:n)=ds*fl(l :n)+dr*(f2(
1
:n)+f3(l :n));
alf(2)=b(l)/c(l); bet(2)=f(l)/c(l); gam(2)=a(l)/c(l);
for j=2:n
rl=c(j)-alf(j)*a(j); alf(j+i)=b(j)/rl; r2=f(j)+a(j)*bet(j);
bet(j+l)=r2/rl; gam(j+l)=gam(j)*a(j)/rl;
end
p(n-1 )=bet(n); q(n-1 )=alf(n)+gam(n);
for j=n-2:-l:l
нншпнинщщнщшщщ imi"" ^"""f
1
""
1
"" -'-''""^имявВиряшщв;""'
p(j)=alf(j+l)*p(j+l)+bet(j+l); q(j)=alf(j+l)*q(j+l)+gam(j+l);
end
r3=bet(n+l)+alf(n+l)*p(l); r4=l.-alf(n+l)*q(l)-gam(n+l); y(n)=r3/r4;
for j=l:n-l
y(i)=p(j)+y(n)*q(i);
end
eas=0.; ebs=0.; ecs=0.;
for j=l:12
eas=eas-dl*(y(j)-y(j+36)+y(j+72)-y(j+108))/sig;
end
for j=25:36
ebs=ebs-dl*(y(j)-y(j+36)+y(j+72)-y(j+108))/sig;
end
for j= 13:24
ecs=ecs+dl*(y(j)-y(j+36)+yG+72)-y(j+108»/sig;
end
bl(l)=(y(2)-y(n))/(2.*hx*r0*sig); bl(n)=(y(l)-y(n-l))/(2.*hx*r0*sig);
e(l)=-d2*y(l)/sig-d3*(y(2)-y(n))/(2.*hx*sig); e(n)=-d2*y(n)/sig-d3*(y(l)-y(n-
l))/(2.*hx*sig);
for j=2:n-l
bl(j)=(yO+l>y(j- l))/(2.*hx*r0*sig); e(j)=-d2*y0)/sig-d3'
l
'(y(j+l>y(j-l))/(2.*hx*sig);
end
ear=0.; ebr=0.; ecr=0.;
for j=l:12
ean=ear+e(j)-e(j+36)+e(j+72)-e(j+108);
end
for j=25:36
ebr=ebr+e(j)-e(j+36)+e(j+72)-e(j+108);
end
for j= 13:24
ecr=ecr-e(j)+e(j+36)-e(j+72)+e(j+108);
end
for j=29:40
ear=ear-e(j)-e(j+72);
end
for j=65:76
jl=j+72; if jl>n jl=jl-n; end
ear=ear+e(j)+e(j 1);
end
for j=17:28
304