Беляев Е.Ф., Шулаков Н.В., Дискретно-полевые модели электрических машин, учебное пособие
Подождите немного. Документ загружается.

жений, что и магнитные потери статора. При этом, конечно, следует
учитывать вращение ротора и вносить соответствующие коррективы.
Подробнее эти вопросы будут рассмотрены в следующем разделе при
рассмотрении вопросов моделирования гистерезисных двигателей.
Магнитное поле, параметры и характеристики двигателя в режи-
ме идеального холостого хода с учётом потерь в стали определяются
при решении стационарного уравнения магнитного поля
J
До Э(р
2
7Юо^о(Тв
+ у) + ?(ф)
(7.77)
совместно с системой уравнений Кирхгофа для цепей статора. Пара-
метры у
в
и у
г
определены выше и могут быть рассчитаны по харак-
теристикам электротехнической стали, используемой в двигателе.
Для анализа электромагнитных процессов асинхронных машин
часто используют эквивалентные электрические цепи - схемы заме-
щения. Схема замещения асинхронного двигателя в режиме идеаль-
ного холостого хода представлена на рис. 7.7.
Ri Xi
__i 1 ГЛГЛГ\
U
Дв
Г
/Ов Дг
-
/О
I
'.г V
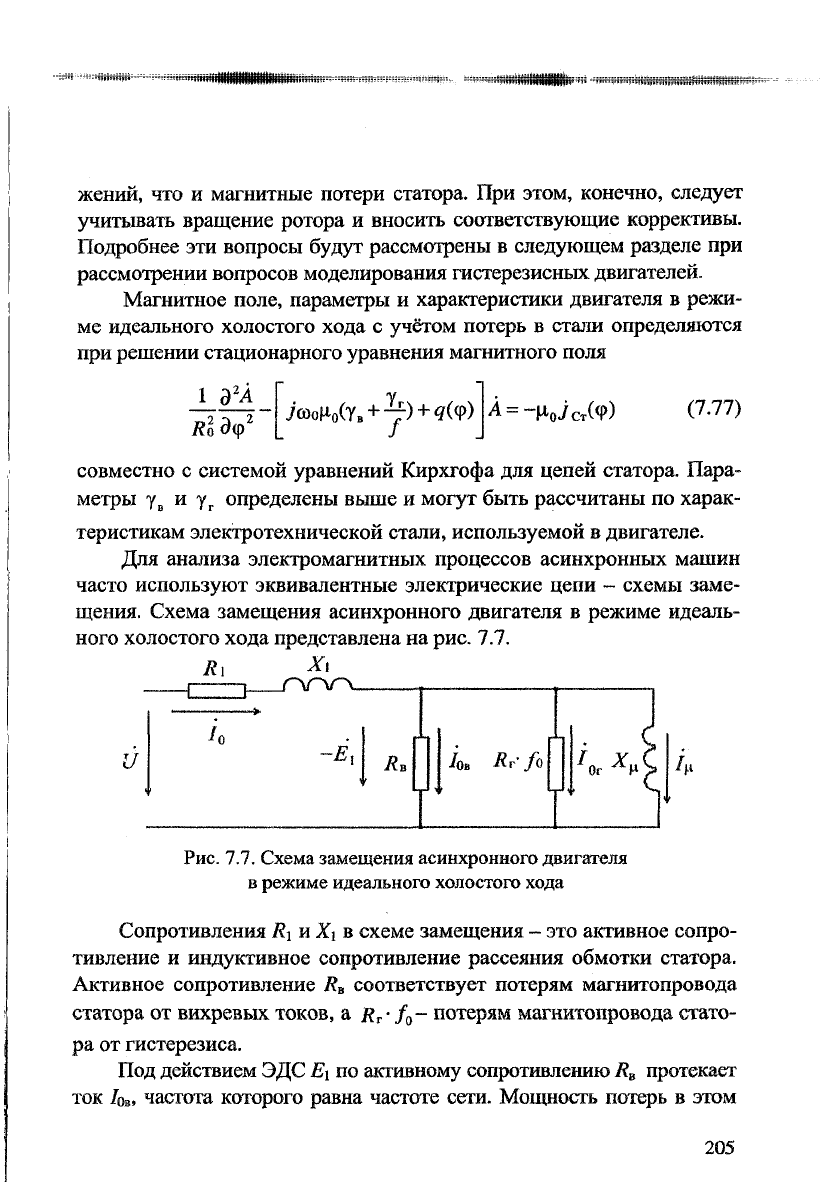
Рис. 7.7. Схема замещения асинхронного двигателя
в режиме идеального холостого хода
Сопротивления
Д1
и Xi в схеме замещения - это активное сопро-
тивление и индуктивное сопротивление рассеяния обмотки статора.
Активное сопротивление Д
в
соответствует потерям магнитопровода
статора от вихревых токов, а Д
г
•
/
0
- потерям магнитопровода стато-
ра от гистерезиса.
Под действием ЭДС Е\ по активному сопротивлению Д
в
протекает
ток /ов, частота которого равна частоте сети. Мощность потерь в этом
сопротивлении оказывается пропорциональной квадрату частоты сети,
и соответствует потерям в магнитопроводе статора от вихревых токов.
Аналогично под действием той же ЭДС по сопротивлению R,
•
/
0
про-
текает ток, величина которого не зависит от частоты сети. Поэтому
мощность потерь в нём оказывается пропорциональной частоте сети
и соответствует потерям магнитопровода статора от гистерезиса.
7.6. ДВУМЕРНАЯ МАТЕМАТИЧЕСКАЯ МОДЕЛЬ
АСИНХРОННОЙ МАШИНЫ В РЕЖИМЕ ХОЛОСТОГО ХОДА
При упрощающих допущениях, принятых в этой главе, легко
реализовать решение краевой задачи (7.10), (7.25) в двумерной по-
становке:
Указанное уравнение с краевыми условиями периодического ти-
па по координате ф и нулевыми условиями первого рода по радиаль-
ной координате решается методом разделения переменных, рассмот-
ренным в части I (подразд. 5.1).
Будем рассматривать искомую функцию A(R, ср) и правую
часть J„(R,
(р)
уравнения (7.10) как функции сеточного аргумента
A(i, j) и J„(hj)
•
Поскольку обе функции являются периодиче-
скими по координате (р, их можно разложить по собственным
функциям дискретного оператора Лапласа n
k
(j)
•
1 Э Г 1 ЭА"|
|
1 1 Э
2
А
RdR{ р dR) R
2
р Эф
2
R—
к
КОН
'
= —£t/*(i)p*(;);
J N 2-1
(7.78)
sf rrrr rff m 11, id ifjl*»*»ifff ^
1
/«(».;)=—ф
4
(ОЦ
4
( i);
я t=i
0<j<Ni\ 0<i<Ni,
j^Ai
li
k
U)
=
e
N
* •
(7.79)
(7.80)
Записывая рассматриваемое уравнение в конечно-разностном ви-
де, подставляя в него разложения (7.78) и (7.79) и выполняя преобра-
зования, получим систему одномерных уравнений для каждой из к
гармоник указанного разложения:
йк,iU
k,i-1
~ Ck.iU
k,i + bk,ifJk,i+1
=
~fk,i '
где
Uk,i
r(i)
+
r(i -1)
bk,i
~
r(i)
r(i)
+
r
(i
+
l)
1 1
r(i)
M-0) ц0'-1)
'.+.
1
м(0
Ck,i
:
ak,i + bk,i + 4,0h
2
RXk
К0
2
ц(0
NJ-L
-jAlZki
f k,i ~ 2~/J ctOV
,/=I
Xk
Jlq,
. ht
sin
N,
(7.81)
(7.82)
(7.83)
(7.84)
(7.85)
(7.86)
где /г
ф
=
2nlN
2
- интервал разбиения пространства координат
ср.
Решая каждое из уравнений (7.81) методом циклической про-
гонки (см. часть I, подразд. 3.2.2), определяем коэффициенты разло-
жения векторного потенциала t/*(i), после чего восстанавливаем
искомую функцию A(i, j), используя выражение (7.78).
Программа решения двумерной краевой задачи в пакете MATLAB:
nl=50; п2=60; пЗ=110; n4=160; nf=12; w=20; r0=30.e-3; hr=0.1e-3; hf=2.*pi/nf;
mu0=4.*pi*l.e-7; me=0.+1.0i; ia=1.0; ib=-0.5-0.866i; ic= -0.5+0.866i;
mu(l:nl)=500.; mu(nl+l:n2)=l.; mu(n2+l:n3)=500.; mu(n3+I:n4)=L;
fi(l:nf,l:n4)=0.0;
for i=l:n4+l
r(i)=r0+hr*(i-l);
end
f(l:2)=ia; f(3:4)=-ic; f(5:6)=ib; f(7:8)=-ia; f(9:10)=ic; f(ll:12)=-ib;
for i=nl+l:n2
for j=l:nf
ft(i,j)=mu0*w*f(j)/(r(i)*hf*hr);
end
end
for k=l:nf
for i=nl+l:n2
for j=l:nf
rl=2.*me*pi*j*k/nf; r2=exp(rl); r3=ft(i,j)*r2; fi(k,i)=fi(k,i)+r3;
end
end
end
for k=l:nf
rl=k*pi/nf; r2=sin(rl); lam(k)=4 *r2*r2/(hf*hf);
end
a(l)=l./mu(l); b(l)=(r(l)+r(2))*(l./mu(l)+l./mu(2))/r(l);
for i=2:n4-l
a(i)=(r(i)+r(i-I))*(l ./mu(i)+1 ./mu(i-1 ))/r(i);
b(i)=(r(i)+r(i+l))*(l/mu(i)+l./mu(i+l))/r(i);
end
for k=l:nf
alf(l)=Q.; bet(l)=0.;
for i=l:n4-l
c(i)=a(i)+b(i)+4.*hr*hr*lam(k)/(r(i)*r(i)*mu(i));dl=c(i)-a(i)*alf(i);
alf(i+l)=b(i)/dl; d2=4.*hr*hr*fi(k,i)+a(i)*bet(i); bet(i+l)=d2/dl;
end
yl(k,n4)=0.0;
for i=n4-l:-l:l
у 1 (k,i)=alf(i+1 )*y 1 (k,i+l)+bet(i+1);
iilKiiililiiliiiiiii i и w*-•
end
end
y(l:n4,l:nf)=0.;
for i=l:n4
for
j=l:nf
for k=l:nf
r 1 =-2. * me*pi*j *k/nf; r2=exp(rl); r3=yl(k,i)*r2; y(i,j)=y(ij)+r3/nf;
end
end
end
fori=l:n4
br(i, 1 )=(y(i,2)-y(i,nf))/(2.*hf*r(i)); br(i,nf)=(y(i, 1 )-y(i,nf-1 »/(2.*hf*r(i));
for j=2:nf-l
br(i,j)=(y(i,j+1 )-y(i,j-1 ))/(2. *hf*r(i));
end
end
for i=2:n4-l
for
j=l:nf
bf(i,j)=-(y(i+1 j)-y(i-1 j))/(2.*hr);
end
end
fori=2:n4-l
for j=l:nf
brf(i,j)=real(bf(i,j));bmf(i,j)=abs(brf(i,j));sgn(i,j)=brf(i,j)./bmf(i,j);
bff(ij)=abs(bf(i j)).*sgn(i,j);
end
end
disp(abs(bf(2:n4-1,6)))_; surf(abs(bf)); colorbar;
xlabel('Axis Fi'); ylabel('Axis R'); zlabel('Axis Bf)
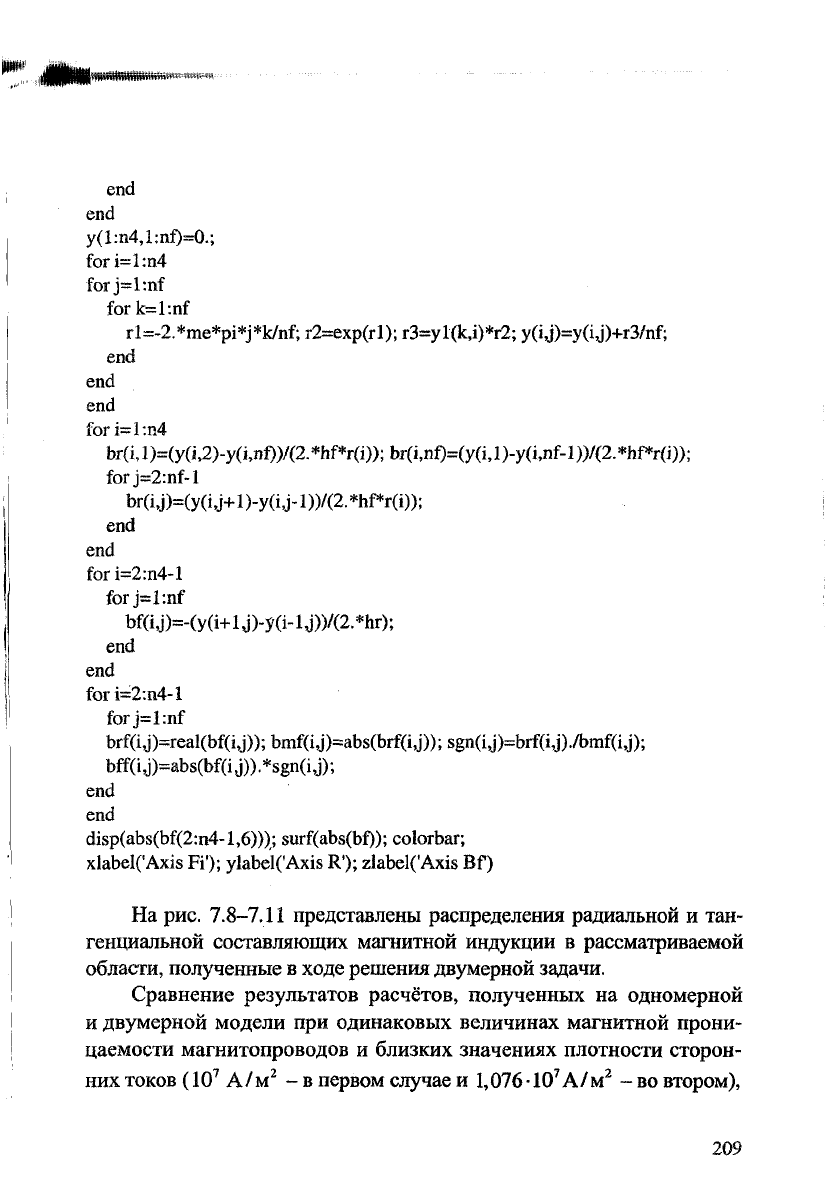
На рис. 7.8-7.11 представлены распределения радиальной и тан-
генциальной составляющих магнитной индукции в рассматриваемой
области, полученные в ходе решения двумерной задачи.
Сравнение результатов расчётов, полученных на одномерной
и двумерной модели при одинаковых величинах магнитной прони-
цаемости магнитопроводов и близких значениях плотности сторон-
них токов (10
7
А/м
2
- в первом случае и 1,076
•
10
7
А/м
2
- во втором),
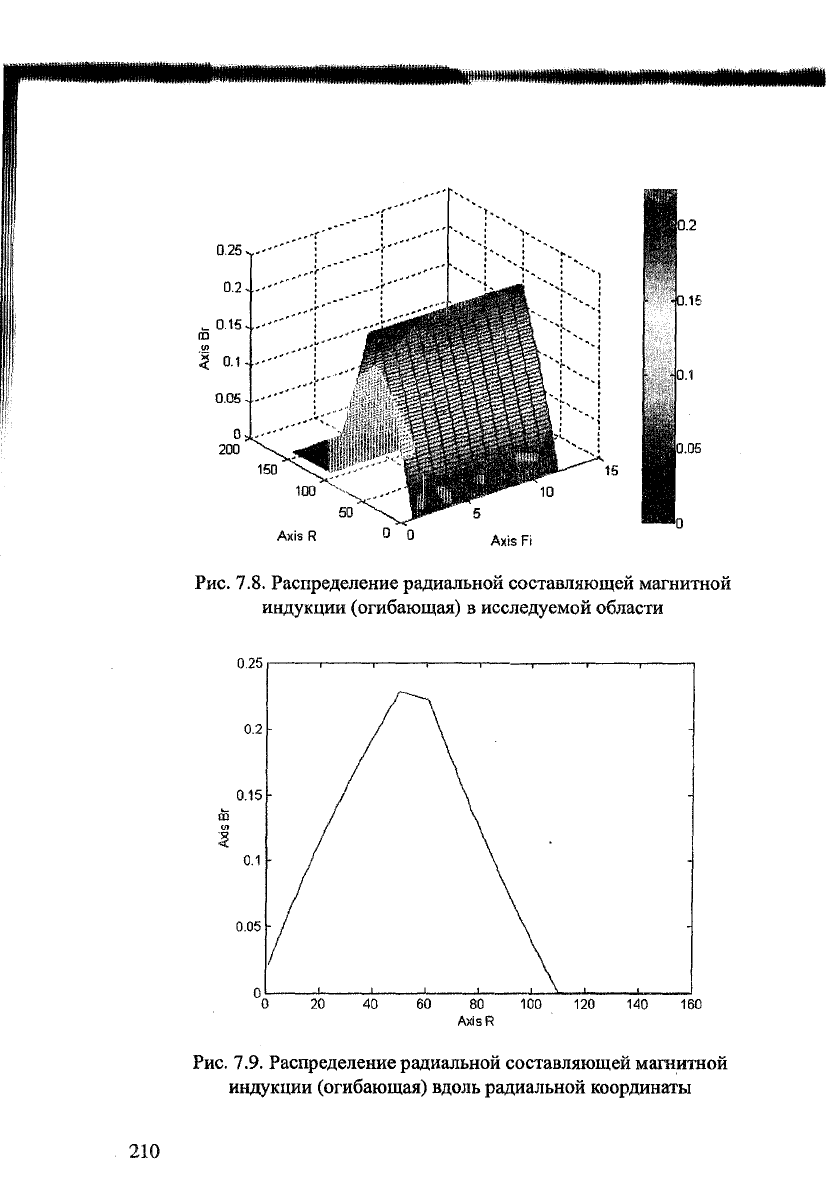
Рис. 7.8. Распределение радиальной составляющей магнитной
индукции (огибающая) в исследуемой области
Рис. 7.9. Распределение радиальной составляющей магнитной
индукции (огибающая) вдоль радиальной координаты
Axis R
0 0
Axis Fi
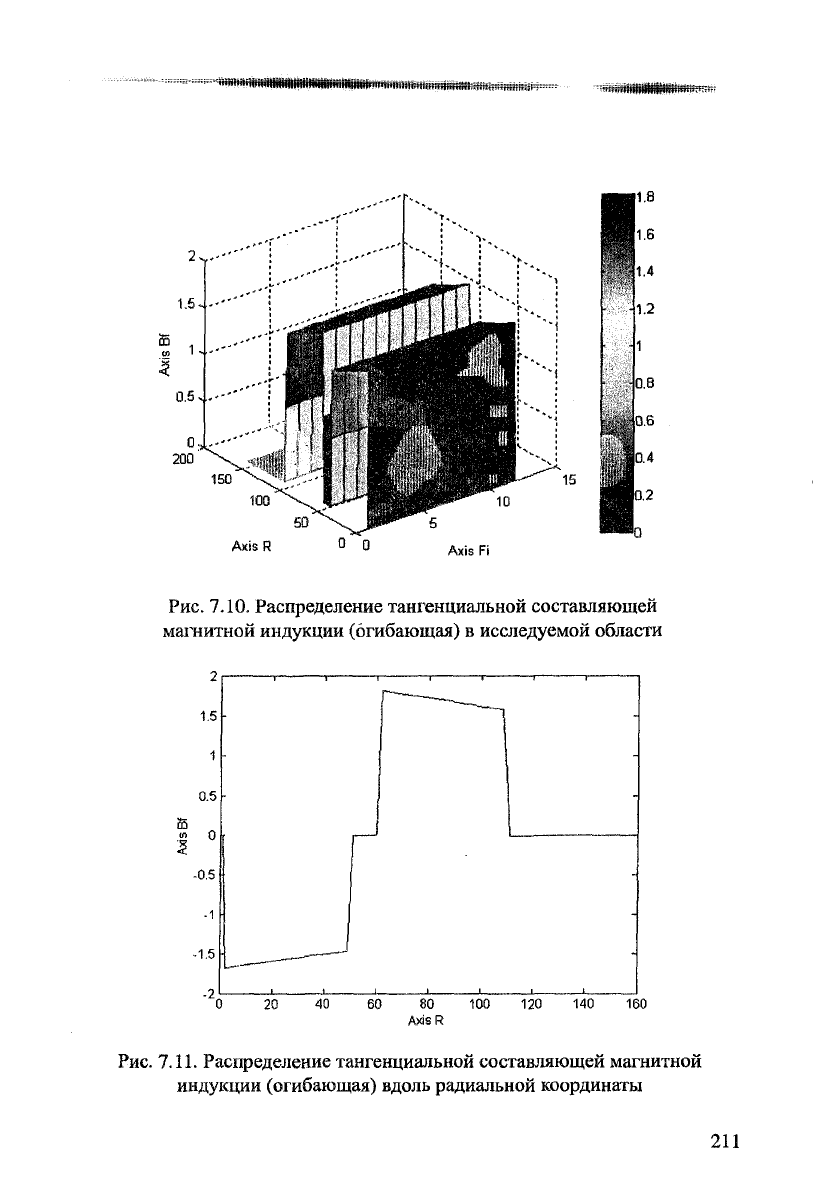
Рис. 7.10. Распределение тангенциальной составляющей
магнитной индукции (огибающая) в исследуемой области
60 80 100 120 140
Axis R
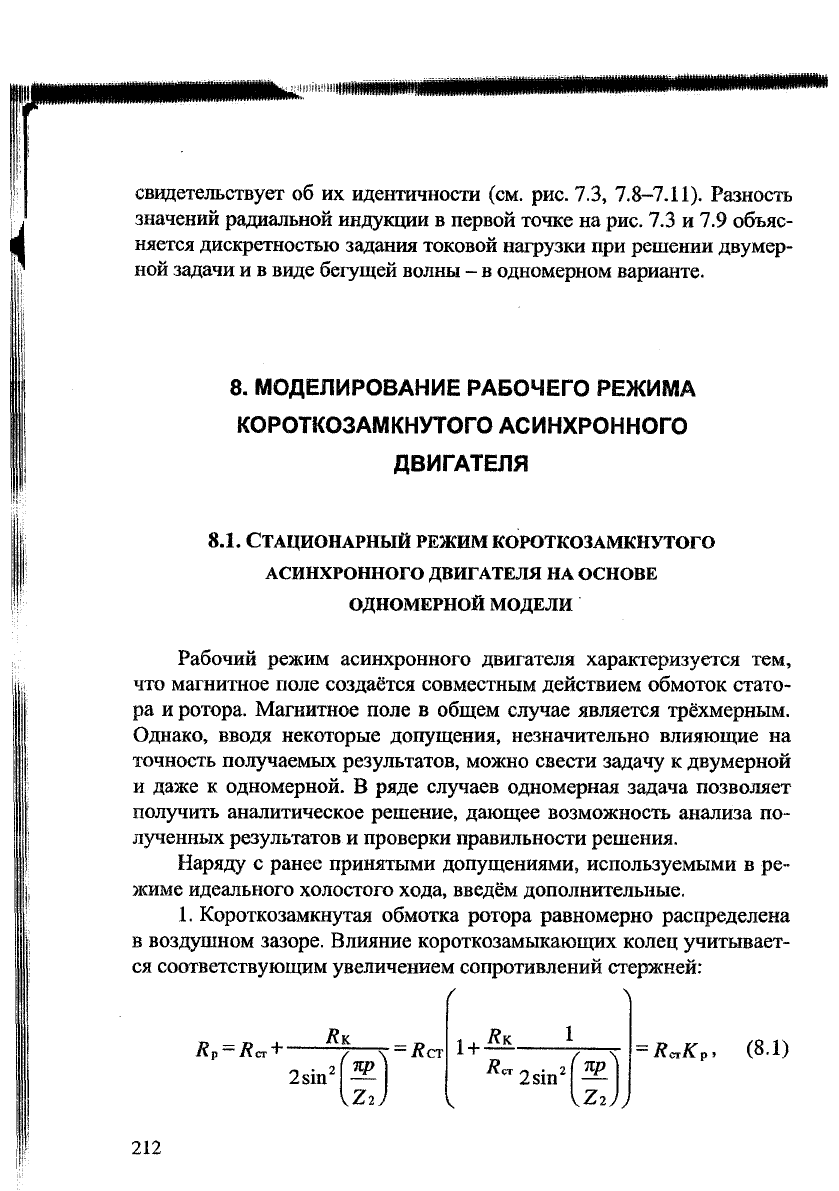
Рис. 7.11. Распределение тангенциальной составляющей магнитной
индукции (огибающая) вдоль радиальной координаты
свидетельствует об их идентичности (см. рис. 7.3, 7.8-7.11). Разность
значений радиальной индукции в первой точке на рис. 7.3 и 7.9 объяс-
няется дискретностью задания токовой нагрузки при решении двумер-
ной задачи и в виде бетущей волны - в одномерном варианте.
8. МОДЕЛИРОВАНИЕ РАБОЧЕГО РЕЖИМА
КОРОТКОЗАМКНУТОГО АСИНХРОННОГО
ДВИГАТЕЛЯ
8.1. СТАЦИОНАРНЫЙ РЕЖИМ КОРОТКОЗАМКНУТОГО
АСИНХРОННОГО ДВИГАТЕЛЯ НА ОСНОВЕ
ОДНОМЕРНОЙ МОДЕЛИ
Рабочий режим асинхронного двигателя характеризуется тем,
что магнитное поле создаётся совместным действием обмоток стато-
ра и ротора. Магнитное поле в общем случае является трёхмерным.
Однако, вводя некоторые допущения, незначительно влияющие на
точность получаемых результатов, можно свести задачу к двумерной
и даже к одномерной. В ряде случаев одномерная задача позволяет
получить аналитическое решение, дающее возможность анализа по-
лученных результатов и проверки правильности решения.
Наряду с ранее принятыми допущениями, используемыми в ре-
жиме идеального холостого хода, введём дополнительные.
1. Короткозамкнутая обмотка ротора равномерно распределена
в воздушном зазоре. Влияние короткозамыкающих колец учитывает-
ся соответствующим увеличением сопротивлений стержней:
/
\
Rk 1
imiiiiRffiiijSlfli
где K
p
- коэффициент, учитывающий влияние короткозамыкающих
колец.
Удельная электропроводность материала стержня
Ур
=
h
RpS ст
(8.2)
Если обмотка ротора равномерно распределена в зазоре машины,
то расчётная электропроводность материала ротора определяется как
y
p
iScrZ2
п8п„
(8.3)
2. Электропроводность и магнитная проницаемость материала
ротора не зависят от пространственных координат
(р
и Z.
3. Обмотка ротора симметрична.
Уравнение векторного потенциала в зазоре машины записывает-
ся как
rot rot А
= 7сг+/р
(8.4)
где j - плотность тока ротора.
Выполняя операции rot, преобразуя полученное выражение по-
добно режиму холостого хода и проектируя уравнения на коорди-
натную ось Z, получим
1JL
RdR
, ц ЭЛ )
1 d(ld
Az
Я
2
Эф^ц Эф
~J cZ J pZ-
(8.5)
Первый член этого выражения показывает распределение тан-
генциальной составляющей магнитной индукции B
v
по радиаль-
ной координате. Тангенциальная составляющая В,
р
имеет место
в ярме статора и ротора, а также в пазах статора и ротора, опреде-
ляя в них потоки рассеяния. Представим эту составляющую в виде
суммы:
1 Э (
R
\_дА
к
рЭй RdR
LJL
RdR
R
IdA
p dR
+
IJL
RdR
R
}_dA
p dR
(8.6)
первый член которой представляет распределение магнитнои индукции
в ярме машины, а второй - потоки рассеяния ротора. Здесь и в даль-
нейшем индексы единственных составляющих плотности тока и век-
торного потенциала будут опущены.
Первую составляющую (8.6) преобразуем подобно тому, как это
делалось для режима холостого хода. В результате преобразований
будем иметь
1JL
RdR р dR
= ~qA.
(8.7)
Потоки рассеяния в пазах ротора пропорциональны току ротора.
Поэтому вторую составляющую (8.6) можно записать в виде
RdR{ рЭR
- К
а2
J
р •
(8.8)
Коэффициент К
а2
в этом выражении можно рассматривать как
отношение индуктивного сопротивления рассеяния ротора к сопро-
тивлению намагничивающего контура Х
а2
] . Подставляя выраже-
ния (8.7) и (8.8) в (8.5), получим
1 д
2
А
До Эф
:
-- qA = -р
0
/
ст
- р
0
(1 + К
а2
)/
р
. (8.9)
Плотность равномерно распределённого в зазоре тока ротора
выражается через векторный потенциал в виде
J= У,
дА - - ,
Л
— + VxJ5 + gradf
dt
(8.10)