Асанов А.З. Моделирование и анализ динамических систем
Подождите немного. Документ загружается.

выполнение второго условия. Физическая интерпретация этого заключается в
том, что интересуются некоторым процессом, начиная с некоторого момента
времени . Именно в момент времени предполагается начало некоторого
воздействия на систему. Часто в линейных системах полагают
Если хотя бы одно из условий 1-3 не выполняется, то функция не
будет являться оригиналом. Таким образом, преобразования (3.4.2) являются
преобразованиями Лапласа и условно обозначаются
или
Существует и обратное преобразование Лапласа, которое позволяет по
известной функции - изображению определить соответствующую функцию
оригинала:
Свойства преобразования Лапласа
Приведём без доказательств краткую сводку свойств преобразования
Лапласа. Подробное изложение этих свойств можно увидеть в специальной
литературе или справочниках[9, 10].
Здесь и далее будем полагать, что , и т.д., а
также выполнены все другие условия математического характера. Все
приводимые здесь свойства можно доказать, используя преобразование
(3.4.2) непосредственно.
1. Линейность преобразования
, где
2. Дифференцирование и интегрирование оригинала
, где
обобщая - ,
гДе - некоторая постоянная величина.
и т.д.
3· Смещение в области оригиналов и в области изображений
ϊ
4- Изменение масштаба
, - вещественное положительное число.
61
5. Умножение в комплексной и действительной областях
6. Дифференцирование и интегрирование изображения
7. Начальное и предельное значения оригинала
8. Преобразование периодической функции-оригинала
где - период функции , - изображение (в течение одного периода).
9. Производная по параметру
Пусть - функция-оригинал, преобразуемая по Лапласу
относительно переменной - её функция-изображение, - параметр,
независящий от и . Справедливы следующие соотношения:
Из этих формул следует, что соотношение не
нарушится, если в левой и правой его частях выполнять операции
предельного перехода, дифференцирования и интегрирования относительно
параметра
В заключении приведем краткую сводку оригиналов и их изображений,
значительно более подробные таблицы можно найти в специальных
справочниках.
Преобразование Лапласа с учетом его свойств и таблица элементарных
операций позволяют свести довольно сложные решения дифференциальных
уравнений к решению алгебраических уравнений в изображениях (см·
разд.6.3).
62
3.4.2. Связь передаточной функции с другими характеристиками
Применение преобразования Лапласа к дифференциальному уравнению
в предположении, что - выходная переменная, -входная
переменная, при и что система при находилась в нулевых
начальных условиях, даст
Отсюда по определению передаточной функции имеем:
(3.4.3) и другое соотношение
, где - изображение выходной переменной (сигнала),
. изображение входной переменной (сигнала).
В дальнейшем будем предполагать выполнение условия , которое
справедливо для физически реализуемых систем. При этом рациональная
дробь является правильной и в соответствующей ей весовой
функции будут отсутствовать слагаемые типа дельта-функции.
Полином , стоящий в знаменателе дробно-рациональной
передаточной функции (3.4.3), называется характеристическим полиномом
системы, а его корни - полюсами передаточной функции
Корни полинома называются нулями передаточной функции.
Допустим , тогда . В этом случае:
изображение реакции системы на единичный ступенчатый сигнал.
Таким образом,
. Попутно получается, что , . весовая
(импульсная) характеристика
Допустим , тогда ,
, т.е. . Передаточная
функция является изображением весовой функции , и наоборот,
весовая функция является функцией-оригиналом передаточной
функции
63
4. Основные формы моделей матричных динамических
систем
Современный этап развития теории систем характеризуется тем, что
центральное место в теоретических и прикладных исследованиях занимакп-
системы со многими входами и выходами. В литературе для таких систем
используются термины "матричные системы", "многомерные системы",
"многосвязные системы"[11], а в англоязычной литературе - MLMO-системы
(Multi-Input Multi-Output). К многосвязным объектам относятся все реальные
сложные промышленные установки, физические процессы и явления и т.д.,
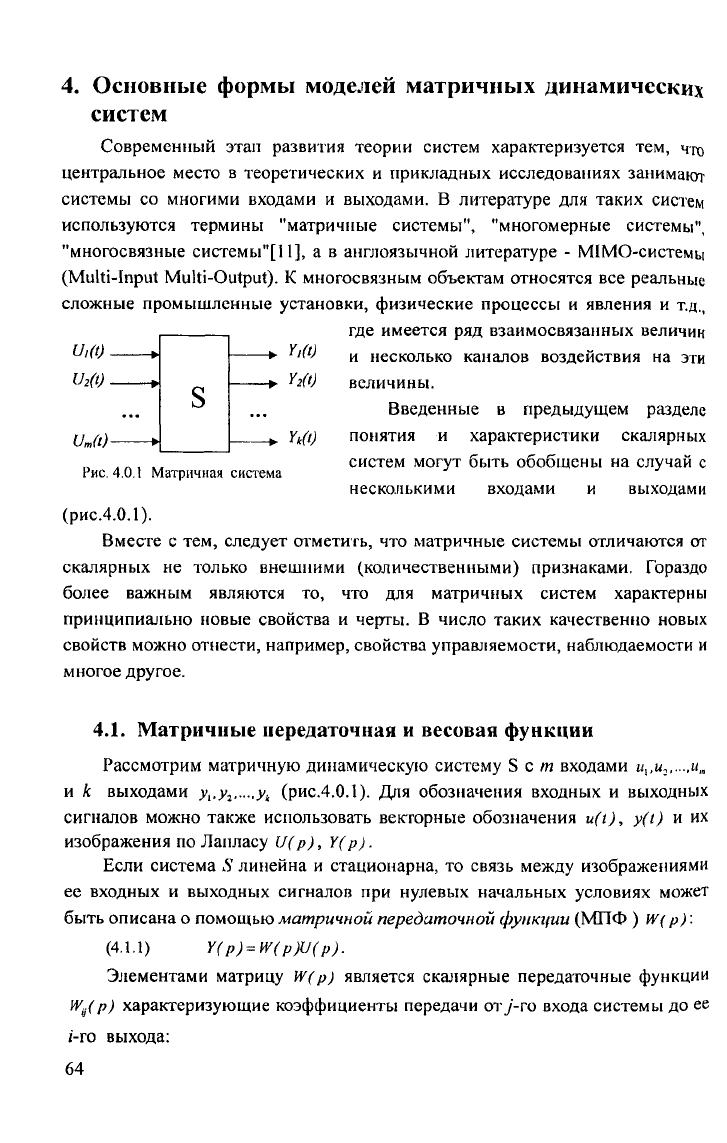
где имеется ряд взаимосвязанных величин
и несколько каналов воздействия на эти
величины.
Введенные в предыдущем разделе
понятия и характеристики скалярных
систем могут быть обобщены на случай с
несколькими входами и выходами
(рис.4.0.1).
Вместе с тем, следует отметить, что матричные системы отличаются от
скалярных не только внешними (количественными) признаками. Гораздо
более важным являются то, что для матричных систем характерны
принципиально новые свойства и черты. В число таких качественно новых
свойств можно отнести, например, свойства управляемости, наблюдаемости и
многое другое.
4.1. Матричные передаточная и весовая функции
Рассмотрим матричную динамическую систему с входами
и выходами (рис.4.0.1). Для обозначения входных и выходных
сигналов можно также использовать векторные обозначения , и их
изображения по Лапласу
Если система линейна и стационарна, то связь между изображениями
ее входных и выходных сигналов при нулевых начальных условиях может
быть описана о помощью матричной передаточной функции (МПФ )
(4.1.1)
Элементами матрицу является скалярные передаточные функции
характеризующие коэффициенты передачи от -го входа системы до ее
-го выхода:
Рис. 4.0.1 Матричная система
64
(4.1.2)
Если система конечномерна и физически реализуема, то скалярные
ПФ являются правильными рациональными дробями, причем для
физически реализуемых систем степень числителя должна быть меньше
степени знаменателя.
Соотношение (4.1.1) описывает связь между входом в выходом системы
в операторной форме. Связь между входными и выходными сигналами во
временной области задается векторным интегралом свертки
который получается применением обратного преобразования Лапласа к
обеим частям соотношения (4.1.1).
Входящая в эту формулу матрица является оригиналом матрицы
и называется матричной весовой функцией системы. Она, как и
матричная ПФ, полностью описывает многомерную линейную стационарную
систему. Элементами этой матрица являются скалярные весовые функции
каждая из которых представляет собой сигнал на -м выходе системы
при подаче на его -й вход импульсного воздействия :
(4.1.3)
Если система устойчива и физически реализуема, то с течением
времени все компоненты экспоненциально стремятся к нулю.
4.2. Полиномиально-матричное описание динамических
систем
Одним из недостатков описания с помощью матричной весовой и
матричной передаточной функций является сложность перехода от них к
структурной реализации в моделях. По этим функциям нелегко даже
определить порядок системы. В этом отношении более удобным является
описание многомерных объектов с помощью системы дифференциальных
Уравнений, связывающих входные и выходные сигналы объекта и их
65
производные. Стандартная форма такого описания для системы (рис.4.0.1)
имеет вид [11]
(4.2.1)
где - оператор дифференцирования, , - операторные полиномы.
Число дифференциальных уравнений (4.2.1.) совпадает с числом
неизвестных , степени операторных полиномов зависят oj
структуры и размерности объекта.
Соотношения (4.2.1) удобно записать в полиномиально-матричной форме
(4.2.2)
где - полиномиальные матрицы.
Пусть через обозначены порядки отдельных
дифференциальных уравнений системы (4.2.1), а через - общий порядок
все системы. Порядок определяется наивысшей из степеней полиномов
, входящих в -е уравнение, а общий порядок равен степени
характеристического полинома системы . Отметим,
что определенный таким образом порядок системы (4.2.1) в общем случае
не совпадает с суммой порядков отдельных уравнений системы, а
удовлетворяет неравенству
Путем эквивалентных преобразований системы (4.2.1) (добавляя к
отдельным уравнениям другие, домноженные на произвольные операторные
полиномы) можно привести систему к так называемой правильной строчной
форме, когда приведенное неравенство обращается в равенство.
Целые числа , характеризующие порядки отдельных уравнений
правильной формы, называются структурными показателями наблюдаемости
и играют важную роль в теории многомерных систем.
Существует второй вариант полиномиально-матричного описания,
дуальное по отношению к рассмотренному. Он имеет вид
(4.2.3)
Первое из этих соотношений представляет собой систему линейных
дифференциальных уравнений для определения компонент вектора
вспомогательных переменных , при этом в правые части этих уравнений не
входят производные от входного сигнала. Второе уравнение представляет
формулу перехода от вектора вспомогательных переменных к вектору
выходных сигналов .
Следует иметь в виду, что квадратные матрицы в вариантах
66
описания (4.2.2) и (4.2.3)имеют различные размеры (в первом случае , во
втором - ). Размеры матриц в этих описаниях также различны.
Пусть через обозначены порядки столбцов матрицы в
описании (4.2.3), понимая под порядком столбца наибольшую из степеней
входящих в него полиномов. Указанные порядки связаны с общим порядком
системы неравенством . Путем эквивалентных преобразований
системы (4.2.3) систему можно привести к так называемой правильной
столбцовой форме, у которой общий порядок системы будет равен сумме
порядков столбцов матрицы
Такая форма, как и правильная строчная форма, находит применение при
исследовании и моделировании многомерных систем. Целые числа ,
характеризующие правильную столбцовую форму, называются структурными
показателями управляемости системы.
4.3. Описание в пространстве состояний
Альтернативой рассмотренным выше вход-выходным видам описания
скалярных и многомерных объектов и их моделей является описание в
пространстве состояний [4, 6, 8, 11]. Кроме входных и выходных переменных
в него входят внутренние переменные объекта , полностью
характеризующие состояние объекта.
Стандартно^ описание системы (рис. 4.0.1) в пространстве состояний
имеет вид:
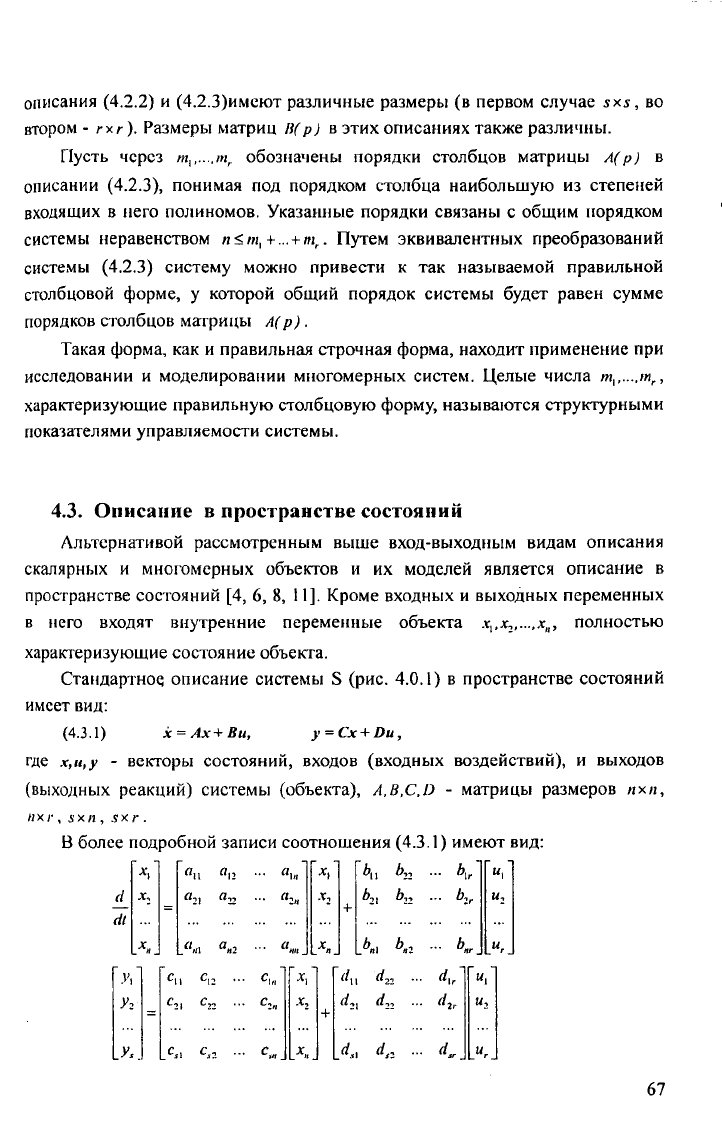
(4.3.1)
где - векторы состояний, входов (входных воздействий), и выходов
(выходных реакций) системы (объекта), - матрицы размеров ,
' У
В более подробной записи соотношения (4.3.1) имеют вид:
67
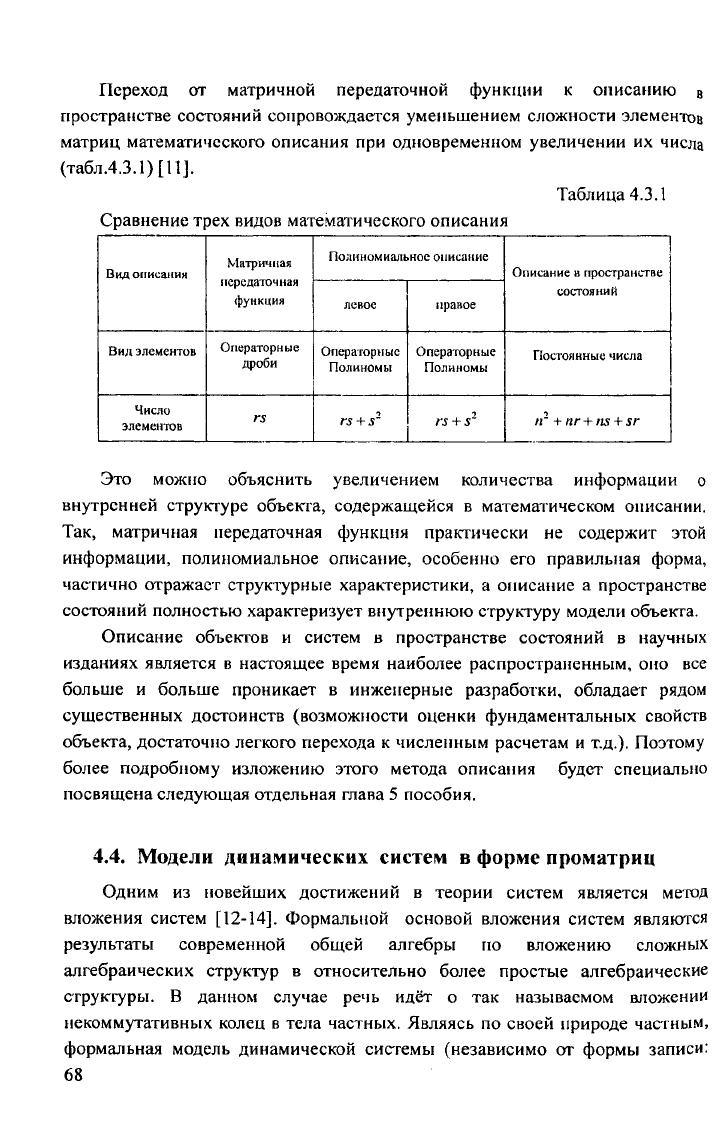
Переход от матричной передаточной функции к описанию в
пространстве состояний сопровождается уменьшением сложности элементов
матриц математического описания при одновременном увеличении их числа
(табл.4.3.1) [11].
Таблица 4.3.1
Сравнение трех видов математического описания
Вид описания
Матричная
передаточная
функция
Полиномиальное описание
Описание в пространстве
состояний
левое правое
Вид элементов
Операторные
дроби
Операторные
Полиномы
Операторные
Полиномы
Постоянные числа
Число
элементов
Это можно объяснить увеличением количества информации о
внутренней структуре объекта, содержащейся в математическом описании.
Так, матричная передаточная функция практически не содержит этой
информации, полиномиальное описание, особенно его правильная форма,
частично отражает структурные характеристики, а описание а пространстве
состояний полностью харакгеризует внутреннюю структуру модели объекта.
Описание объектов и систем в пространстве состояний в научных
изданиях является в настоящее время наиболее распространенным, оно все
больше и больше проникает в инженерные разработки, обладает рядом
существенных достоинств (возможности оценки фундаментальных свойств
объекта, достаточно легкого перехода к численным расчетам и т.д.). Поэтому
более подробному изложению этого метода описания будет специально
посвящена следующая отдельная глава 5 пособия.
4.4. Модели динамических систем в форме проматриц
Одним из новейших достижений в теории систем является метод
вложения систем [12-14]. Формальной основой вложения систем являются
результаты современной общей алгебры по вложению сложных
алгебраических структур в относительно более простые алгебраические
структуры. В данном случае речь идёт о так называемом вложении
некоммутативных колец в тела частных. Являясь по своей природе частным,
формальная модель динамической системы (независимо от формы
записи:
68
дифференциальиые уравнения, передаточные функции, операторы и т.д.)
обязательно подчиняется общим законам частных.
Суть метода вложения заключается в следующем:
Решаемая задача теории систем представляется в виде некоторой
специально сконструированной матрицы, называемой проблемной матрицей
или кратко проматрицей. Эта проматрица содержит исчерпывающую
информацию о свойствах линейной системы. В теории установлены
детерминантные соотношения, которым необходимо удовлетворять, чтобы
передаточные функции (операторы) исследуемой системы тождественно
соответствовали желаемым передаточным функциям (операторам).
Метод вложения систем позволяет решать практически все задачи
теории линейных систем, включая и те, которые при использовании
традиционных методов не имели удовлетворительного решения.
Формальное представление динамической системы в методе вложения
заключается в следующем.
Пусть рассматриваются линейные непрерывные динамические системы,
поведение которых во времени описывается в форме модели:
(4.4.1)
с начальными условиями . Здесь - вектор состояния
системы, - вектор выходных величин системы, - вектор
входных величин системы, - вещественные матрицы.
Переход от уравнений (4.4.1) к операторной форме записи
осуществляется путём применения преобразования Лапласа. Таким образом,
в результате соответствующих преобразований формируются операторы,
записанные в алгебраической форме и отражающие зависимость выходных
величин от входных величин и начальных значений.
(4.4.2)
Здесь - матричная передаточная функция от входного воздействия
к выходу , - матричная передаточная функция от начальных
условий к выходу. В элементах и во взаимном расположении элементов
матричных передаточных функций и содержится вся
информация о динамических свойствах рассматриваемого объекта.
Каждая система характеризуется своим набором подсистем,
описываемых моделями типа (4.4.1), соединённых в одно целое. Так в задаче
моделирования это только одна такая подсистема, в задаче регулирования две
69
подсистемы: объект регулирования и регулятор.
Пусть система включает некоторое количество подсистем. Каждая
подсистема представлена парой матричных передаточных функций и
. Предполагается, что из этих матричных передаточных функций, а
также из единичных и нулевых матриц подходящего размера может быть
составлена некоторая квадратная блочная матрица, обладающая
принципиальным свойством - она всегда обратима. Вводя обозначение
для указания блочной матрицы можно записать:
Здесь - порядковый номер подсистемы с моделью (4.4.1), - порядковый
номер подсистемы независимо от формы записи модели, - порядковый
номер подсистемы, на которую действуют независимое входное воздействие
(управление, возмущение).
Определение 1. Обратимая блочная матрица , которая преобразует
все начальные условия и входные воздействия системы, записанные в виде
блок-столбца, во все выходные и промежуточные величины, а также во
входные воздействия, называется реверсивной проблемной матрицей или
ре проматрицей.
Определение 2. Матрица , обратная репроматрице, т.е.
удовлетворяющая условию:
называется проблемной матрицей или кратко проматрицей.
Формально проматрица представляет содержание задачи и все
динамические свойства системы, подсистемы которой описываются
моделями (4.4.1). Проматрица может быть сформирована непосредственно из
матричных коэффициентов моделей типа (4.4.1) на основе простых
алгебраических преобразований.
Рассмотрим многосвязный стационарный линейный объект в
пространстве состояний.
70