Appel W. Mathematics for Physics and Physicists
Подождите немного. Документ загружается.

Complex logarithm; multivalued functions 137
THEOREM 5.4 Let ℓ and ℓ
′
be two complex logarithms, defined on C \ C and
C \C
′
, respectively. Then, for any z ∈ C \{C ∪C
′
}, the difference ℓ(z) −ℓ
′
(z) is
an integral multiple of 2πi.
This difference is constant on each connected component of C \{C ∪C
′
}.
In addition, the principal logarithm sat isfies th e following property:
PROPOSITION 5.5 If z ∈ C is written z = ρ e
iθ
, with θ ∈ ]−π, π[ and
ρ ∈ R
+∗
, then L(z) = log ρ + iθ.
Example 5.6 Let ℓ(z) be the complex logarithm defined by the cut R
+
. The reader will easily
check that, if z = ρ e
iθ
with θ ∈]0, 2π[ this time and ρ ∈ R
+∗
, then ℓ(z) = log ρ + iθ.
5.1.b The square root function
The logarithm is not the only f unction that poses problems when one tries to
extend it from the (half) real line to the complex plane. The “square root”
2
function is another.
Indeed, if z = ρ e
iθ
, one may be tempted to define the square root of z by
p
z
def
=
p
ρ e
iθ/2
. But a problem arises: the argument θ is only defined up to
2π, and s o θ/2 is only d efined up to a multiple of π; t hus, there is ambiguity
on the sign of
p
z.
It is therefore necessary to specify which determination of the a rgument
will be used to d efine the square root function. To this end, we introduce
again a cut and choose a continuous determination of the argument (which
always exists on a simply connected open set).
In the following, each time the complex square root function is mentioned,
it will be necessary to indicate, first which is the cut, and second, which is the
determination of the argument considered.
Example 5.7 If the principal determination of the argument θ = Arg z ∈ ]−π, π[ is chosen,
one can defined z 7−→
p
z
def
=
p
ρ e
iθ/2
and the restriction of “this” square root function to the
real axis is the usual real square root.
By chosing iR
−
as the cut, one can define a square root function on the whole real axis.
5.1.c Multivalued functions, Riemann surfaces
There is a trick to avoid having to introduce a cut for functions like the loga-
rithm or the square root. Physicists call these in general multivalued functions,
and mathematicians speak of functions defined on a Riemann surface.
We sta rt with this second point of view.
The main idea is to replace the punctured complex plane (i.e., wit hout
0), on which the definition of a holomorphic logarithm or s quare root was
2
The notation “
p
” to designate the square root (this symbol is a deformation of the
letter “r”) was introduced by the German mathematician Christoff Rudolff (1500—1545).
138 Complex Analysis II
Georg Friedrich Bernhard Riemann (1826—1866), German math-
ematician of genius, brought extraordinary results in almost all
fields: differential geometry (riemannian manifolds, riemannian
geometry), complex analysis (Riemann surfaces, Riemann’s map-
ping theorem, the Riemann zeta function in relation to number
theory, th e nontrivial zeros of which are famously conjectured
to l ie on the line of real part
1
2
), integration (Riemann integral),
Fourier analysis (Riemann-Lebesgue theorem), differential calcu-
lus (Green-Riemann theorem), series,... He also contributed to
numerous physical problems (heat and light propagation, mag-
netism, hydrodynamics, acoustics, etc.).
unsuccessful, by a larger domain w hich is simply connected.
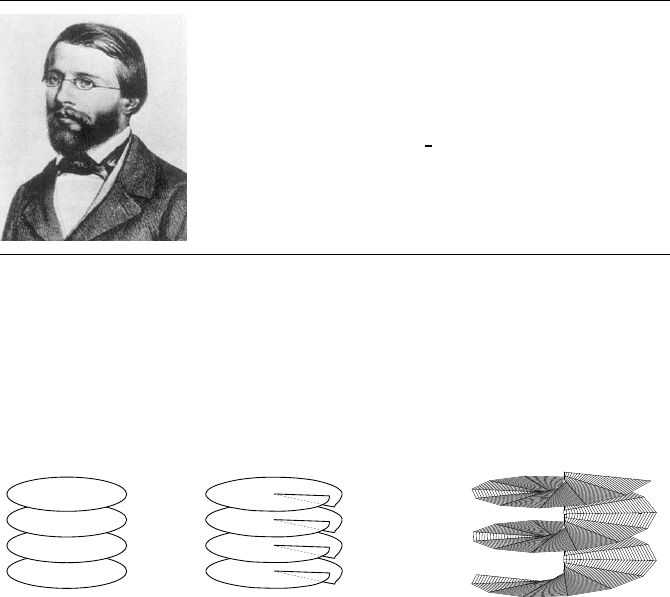
Denote by H the helix- shaped surface which is constructed as follows.
Take an infinite collection of planes, stacked ver tically. Each of these planes
is then cut, for instance along the positive real axis, and the upper part of the
cut of one plane is then glued to the the lower part of the cut in the plane
immediately above:
cutting...
−−−−→
... and gluing
−−−−−−→
(The t hird figure is what is called a h elicoid in geometry. Here, only the
topology of the surface concerns us. The helicoid can be found in spiral
staircases. Close to the axis of the staircase, the steps are very steep; this is why
masons use an axis with nonzero radius.)
This surface is called th e Riemann s urface of the logarithm fu nction.
Each of the points on this surface can be mapped to a point on the complex
plane, simply by projecting vertically. Two points of the helicoid precisely
vertical to each other are therefore often identified to the same complex number.
They are distinguished only by being on a different “floor.” Note that walking
on the helicoid and turning once around the axis (i.e., the origin), means that
the floor changes, as in a parking garage.
PROPOSITION 5.8 H is simply connected.
It it then possible to define a logarithm function on H by integrating
the function ζ 7→ 1/ζ along a path on H joining 1 to z (1/ζ denoting
the inverse of the complex number identified with a point of the Riemann
surface). It is ea sy to see that this path integral makes sense and, because
of th is proposition, it does not depend on the choice of the path from 1
Harmonic functions 139
to z. This gives a well-defined logarithm function L : H → C such that
exp(L(z)) = z for all points in H .
The point of view of a physicist is somewhat d ifferent. Instead of consid-
ering H , she is happy with C \ {0}, but says t hat the logarithm function is
multivalued, th at is, for a given z ∈ C \ {0}, the function L(z) takes not a
single value, but rather a whole sequence of values; the one that should be
chosen depends on the path taken to reach the point z. The function L is
then holomorphic on any simply connected subset of C\{0} (and t he classical
local results, such as the Taylor formulas, are applicable). It is also s aid that
the logarithm f unction has many branches (corresponding to a choice of the
floor of H ).
This viewpoint can seem quite shocking to the adepts of mathematical
rigor, but it has its advant ages and is particularly intuitive.
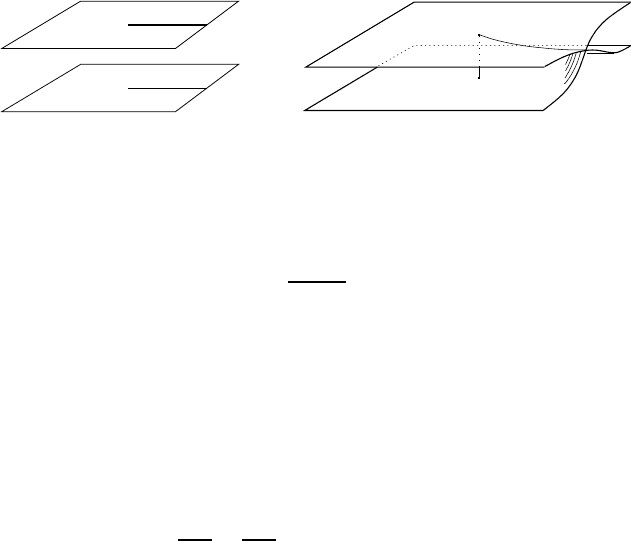
Next, let us construct the Riemann surface associated to the square-root
function. It is clear that by extending the square-root function by continuity
on C \{0}, the sign of the function changes after one turn around the origin,
but comes ba ck to its initial value after turning twice. Hence, we take two
copies of the complex plane, and cut them before gluing again in the following
manner:
gluing
−−−→
When the square-root function has a given value on one of the sheets, it
has the opposite value on the equivalent point of the other sh eet. However, it
should be noticed that this surface is not simply connected.
5.2
Harmonic functions
5.2.a Definitions
DEFINITION 5.9 (Harmonic function) A function u : R
2
→ R, defined on an
open set Ω of the plane, is harmonic on Ω if its laplacian is identically zero,
that is, if it satisfies
△u =
∂
2
u
∂ x
2
+
∂
2
u
∂ y
2
= 0 at any point of Ω.
140 Complex Analysis II
We will see, in this section, that a number of theorems proved for h olomor-
phic functions remain true for harmonic functions, notably the mean value
theorem, and the maximum principle. This will have important consequences
in physics, w here there is an a bundance of harmonic functions.
First, w hat is the link between holomorphic functions and harmonic func-
tions?
If f ∈ H (Ω) is a holomorphic function, it can be expressed in the form
f = u + iv, where u and v are real-valued functions; it is then easy to show
that u and v are harmonic. Indeed, f being C
∞
, the functions u and v are
also C
∞
, so
△u =
∂
2
u
∂ x
2
+
∂
2
u
∂ y
2
=
∂
∂ x
∂ u
∂ x
+
∂
∂ y
∂ u
∂ y
Cauchy
=
∂
∂ x
∂ v
∂ y
−
∂
∂ y
∂ v
∂ x
Schwarz
= 0
from the Cauchy-Riemann equations on the one hand, and Schwarz’s theorem
concerning mixed derivatives of functions of class C
2
on the other hand. The
argument for v is similar. To summarize:
THEOREM 5.10 The real and the imaginary part of a holomorphic fu nction are
harmonic.
Now, we introduce t he notion of harmonicity for a complex-valued func-
tion. If f is C
2
we have
△f =
∂
2
f
∂ x
2
+
∂
2
f
∂ y
2
=
∂
∂ x
−i
∂
∂ y
∂
∂ x
+ i
∂
∂ y
f = 4
∂
∂ z
∂
∂ ¯z
f = 4 ∂∂ f .
DEFINITION 5.11 A complex-valued function f defined on an open subset Ω
of the plane is ha rmonic if it satisfies
△f = 0, i.e., ∂∂ f = 0.
5.2.b Properties
PROPOSITION 5.12 A complex-valued function f is harmonic if and only if its
real and imaginary parts are harmonic.
Proof. If u and v are harmonic, then u + iv is cert ainly also harmonic since the
operators ∂ and ∂ are C-linear.
Conversely, if f is harmonic, it suffices to take the real part of the relation △f = 0
to obtain △u = 0, and similarly for the imaginary part.
Hence, in particular, any holomorphic function is harmonic. What about
the converse? I t cannot hold in general because there need be no relation
whatsoever between the real and imaginary parts of a complex-valued h ar-
monic function, whereas there is a very subtle one for holomorphic functions
(as seen from the Cauchy-Riemann equations). However, there is some converse
for the real (or imaginary) part only:

Harmonic functions 141
THEOREM 5.13 Any real-valued harmonic funcion is locally the real part (resp. the
imaginary part) of a holomorphic function.
What is meant by “locally” here? Using only the methods of differential
equations, one can show that:
PROPOSITION 5.14 Let B be an open ball and f : B → R be a harmonic
function. There exists a harmonic function v : B → R such that F = u + iv is
holomorphic on B.
The astute reader will undoubtedly have already guessed what prevents
the extension of this theorem to any open subset Ω: if Ω has “holes,” the
function v may cha nge value wh en following its extensions around the hole.
The same phenomenon will be seen in the section about analytic continuation,
and it has already been visible in C auchy’s theorem. On the other hand, if u
is harmonic on a simply connected open subset, then u is indeed the real part
of a function holomorphic on the whole of Ω.
COROLLARY 5.15 If u : Ω → C is harmonic, then it is of class C
∞
.
Proof. It is enough to show that for any z ∈ Ω, there is some open ball B containing
z such that u restricted to B is C
∞
. But on B there is a ho l omorphic function f such
that u = Re( f ) on B; in partic u l ar, f is C
∞
on B, hence so is its real part in the sense
of R
2
-differentiability.
The following theorems are also d educed from Proposition 5.14.
THEOREM 5.16 (Mean value theorem) Let Ω be an open subset of R
2
≃ C and
let u be harmonic on Ω. For all z
0
∈ Ω and for all r ∈ R such that B(z
0
; r) ⊂ Ω,
we have
u(z
0
) =
1
2π
Z
π
−π
u(z
0
+ r e
iθ
) dθ,
or, in real notation (on R
2
),
u(x
0
, y
0
) =
1
2π
Z
π
−π
u(x
0
+ r cos θ, y
0
+ r sin θ) dθ.
THEOREM 5.17 (Maximum principle) Let Ω be a domain in C, u : Ω → R
a harmonic function and a ∈ Ω. Then eith er u is constant on Ω or a is not a
local maximum of u, that is, any neighborhood of a contains a point b such that
u(b) < u(a).
Similarly, if u is not constant, it does not have a local minimum either.
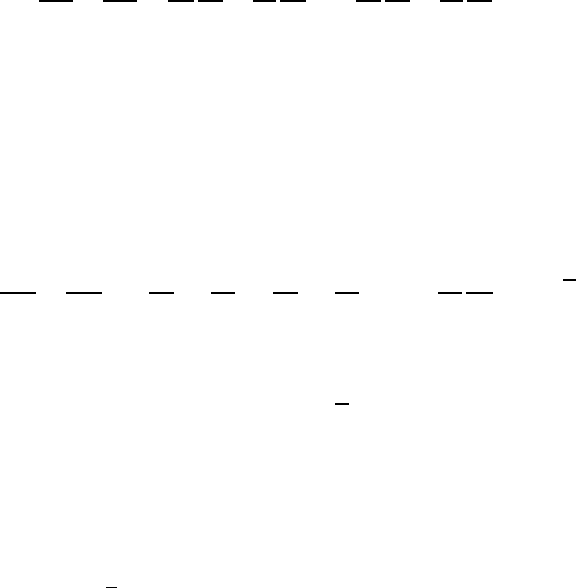
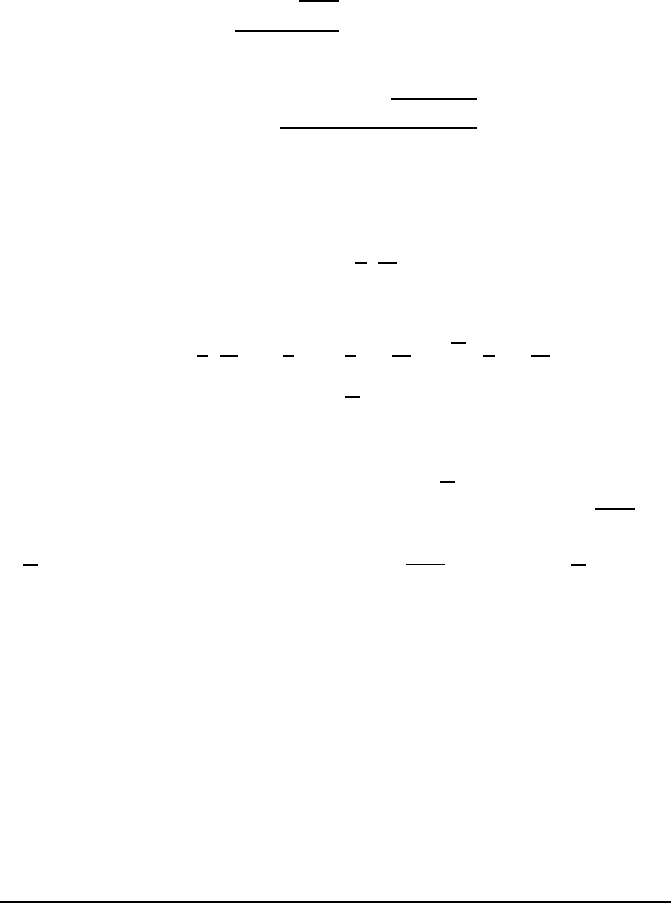
For ha rmonic functions, it is possible to explain the maximum principle
graphically. Indeed, if z is a local extremum (minimum or maximum), and is
not constant, the function u must have the following aspect:
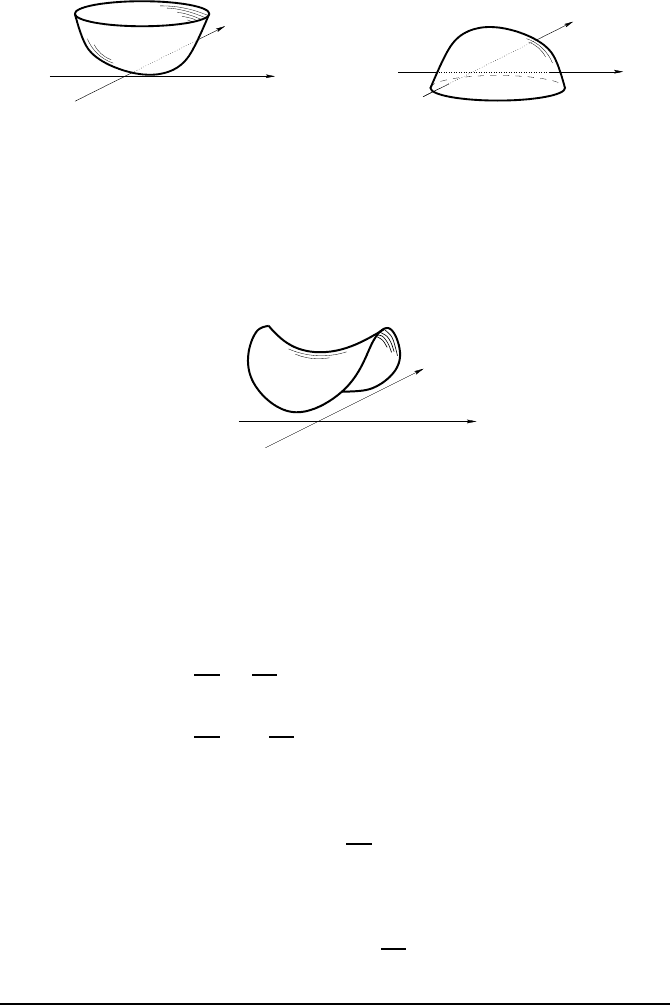
142 Complex Analysis II
x
y
or
x
y
But, in the first case, it is transparent that ∂
2
u/∂ x
2
must be positive, as
well as ∂
2
u/∂ y
2
, and so the laplacian of u cannot be zero. In the second case,
those same partial derivatives are negat ive, and the laplacian cannot be zero
either.
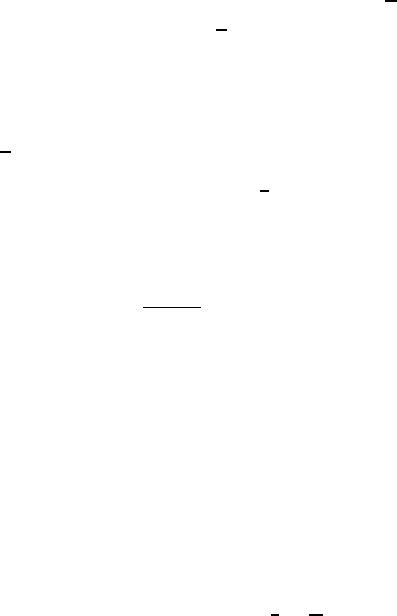
A harmonic f unction must have one of the two partial derivatives negat ive
and the other positive, which gives the graph the shape of a saddle or a
mountain pass or a potato chip
3
:
x
y
Such a surface obviously has no local extremum, as any bicyclist will tell you!
5.2.c A trick to find f knowing u
Consider a f unction u : Ω → R which is harmonic on a simply connected
open set Ω. To find a function v : Ω → R which is also harmonic and such
that u + iv is holomorphic, we have to solve the system
∂ u
∂ x
=
∂ v
∂ y
∂ u
∂ y
= −
∂ v
∂ x
.
for any z ∈ Ω.
There is a classical method: integrating the second equation, we write
v(x, 0) = −
Z
x
0
∂ u
∂ y
(x
′
, 0) dx
′
,
then
v(x, y) = v(x, 0) +
Z
y
0
∂ u
∂ x
(x, y
′
) dy
′
3
A question for physicists: why is it that a potato chip has a hyperbolic geometry? Another
question: why is it also true of the leaves of certain plants, and more spectacularly, for many
varieties of iris flowers?
Harmonic functions 143
(integrating the first equation).
In fact, a “trick” exists to find easily the holomorphic f unction f with
real part equal to a given harmonic f unction u, avoiding the approach with
differential equations. Therefore let u be a h armonic function on a simply
connected open set Ω ⊂ C. We are looking for a holomorphic function
f : Ω → C such that u = Re( f ). Hence in particular
u(x, y) =
f (z) + f (z)
2
with z = x + i y
namely,
u(x, y) =
f (x + i y) + f (x + i y)
2
(∗)
We are considering the function u(x, y) as a function of two real variables.
Let us extend it to a function of two complex variables eu(z, z
′
). For instance,
if u(x, y) = 3x + 5x y, we define eu(z, z
′
) = 3z + 5zz
′
. Now put
g(z)
def
= 2eu
z
2
,
z
2i
. (∗∗)
Then, using formulas (∗) and (∗∗), we get
g(z) = 2eu
z
2
,
z
2i
=
2
2
n
f
z
2
+ i
z
2i
+ f
z
2
−i
z
2i
o
= f (z) + f (0), (5.3)
so that f (z) is, up to a purely imaginary constant, g(z) − g(0)/2, and hence
f (z) = g(z) −u(0, 0) + i C
nt
.
To est ablish formula (5.3), we used t he fact that the function z 7→ f (z) ca n
also be expressed a s a certain function
e
f of the variable ¯z, and more precisely
as f (¯z). For instance, if f (z) = 3z + iz
2
, th en f (z) = 3¯z −i¯z
2
= f (¯z).
Now, isn’t all this a little bit fishy? We have considered in the course of
this reasoning, that the functions (u, f ,...) behaved as “operators” performing
certain operations on their variables (raise it to a power, multiply by a con-
stant, take the cosine...), and that they could just as well perform them on a
complex variable if they could do so on a real one, or on ¯z if they knew how
to operate on z. T his is not at all the usual way to see a function! However, the
expansions of f and u in power series give a rigorous justification of all those
manipulations. They also give the limit of t he meth od : it is necessary that the
functions have power series ex pansions valid on the whole set Ω considered.
Thus, this technique works if Ω is an open ball (or a connected and s imply
connected open subset, by analytic continuation), but not on a domain which
is not simply connected, an annulus, for example.
4
4
I wish to thank Michael Kiessling for teaching me this little-known trick.
144 Complex Analysis II
Example 5.18 Let u(x, y) = 3x
2
− 3 y
2
+ 5x y + 2, which satisfies △u = 0. Then we have
eu(z, ¯z) = 3z
2
−3¯z
2
+ 5z¯z + 2 and 2eu(z/2, z/2i) = 3z
2
+ 5z
2
/2i + 4 = f (z) + f (0), which gives
in particular that 2Re f (0) = 4, hence f (0) = 2+i×C
nt
. Hence we have f (z) = 3z
2
+5z
2
/2i+ 2
(up to a purely imaginary constant) and one checks that th e real part of f is indeed equal to
u.
Example 5.19 Consider the function u(x, y) = e
−x
sin y. It is easy to see that this f u nction
is harmonic. Then we have g(z) = 2e
−z/2
sin(z/2i) = −2ie
−z/2
sinh(z/2). Since g(0) = 0, we
have f (z) = g(z) + i C
nt
, hence
e
−x
sin y = Re
h
2ie
−z/2
sinh
z
2
i
.
5.3
Analytic continuation
Assume a function f is known on an open subset Ω by a power series
expansion that converges on Ω. We would like to know it is possible to extend
the definition of f to a larger set.
Take a convenient example: we define the function f on the open ball
Ω = B(0 ; 1) by
f (x) =
∞
X
n=0
z
n
. (5.4)
We know that this power series is indeed convergent on Ω, but divergent for
|z| > 1. However, if we start from the point z
0
=
1
2
+
2i
3
, for instance, we can
find a new power series which converges to f on a certain neighborhood Ω
′
of z
0
:
f (z) =
∞
X
n=0
a
n
(z − z
0
)
n
on a neighborhood of z
0
. (5.5)
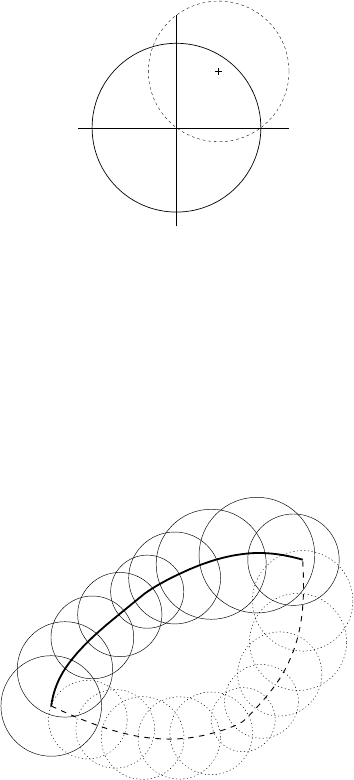
But — surprise! — this neighb orhood may well extend beyond Ω, as is shown
in Figure 5.2 on the facing page.
We can then choose a path γ and try to find, for any point z of γ, a disk
of convergence of a power series centered at z coinciding with f on Ω. This
is what is called an analytic continuation a long a path (see Figure 5.3).
This means that it has been possible to continue the function f to certain
points of the complex plane where the original series (5.4) was not convergent.
On the intersection Ω
′
∩Ω, the two s eries (5.4) and (5.5 ) coincide, because of
the “rigidity” of holomorphic functions.
Is this rigidity sufficient to ensure that this analytic continuation is unique?
Well, yes and no.
If we try to continue a function analytically by going around a singular ity,
the continuation thus obtained may depend on which side of the singularity
Analytic continuation 145
z
0
Ω
Ω
′
Fig. 5.2 — Analytic continuation of f on an open set Ω
′
extending beyond Ω.
Fig. 5.3 — Co ntinuation along a path γ with successive disks, and second continuation
along a path γ
′
.
146 Complex Analysis II
the ch osen pat h ta kes. For instance, in the case of th e function f defined by
f (z) =
P
∞
n=1
(−1)
n+1
z
n
/n , which is equal to z 7→ log(1 + z) on Ω = B(0 ; 1),
there exists a singularity at the point z = −1. Two continuations, defined by
paths running a bove or under the point z = 1, will differ by 2πi.
On the other hand, the following uniqueness result holds:
THEOREM 5.20 Let f be a function holomorphic on a domain Ω
0
. Let Ω
1
, . . . , Ω
n
be domains in C such that
S
n
i=1
Ω
i
is connected and simply connected and con-
tains Ω
0
. If there exists an analytic continuation of f to
S
n
i=1
Ω
i
, then this analytic
continuation is unique.
5.4
Singularities at infinity
It is possible to compactify the complex plane by adding a single point at
infinity.
DEFINITION 5.21 (Riemann sphere) We denote by C
def
= C ∪ {∞} the set
consisting of the complex plane together with an additional point “infinity.”
The point a t infinity corresponds to the limit “|z| → +∞” in C. Since
we add a single point, independent of the argument of z, t his means that
all the “directions” to infinity are identified. Then we are led to represent
this extended complex plane in the form of a sphere,
5
called the Riemann
sphere. This can also be obtained, for example, by stereographic projection
(see Figure 5.4 on the next page).
DEFINITION 5.22 (Residue at infinity) Let f be a function meromorphic on
the complex plane. Define a function F by F (z) = f (1/z). The function f
is said to have a pole at infinity if F has a pole at 0, and f is said to have an
essential singula rity at infinity if F has an essential singularity at 0.
The residue at infinity of f , d enoted Res ( f ; ∞), is the quantity
Res ( f ; ∞) = Res
−
1
z
2
F (z) ; 0
.
5
One can understand why “a plane with all directions to infinity identified is a sphere” by
taking a round tablecloth and grasping in one hand the whole circumference (the poi nts of
which are “infinitely far” from the center for a physicist). One obtains a pou ch, which is akin
to a sphere.
The open sets in C are the usual open sets in C and the complements of compact subsets
in C. The topology obtained is the usual topology for the sphere, in which the point ∞ is like
any other point.