Алешин Г.В. Оценка качества информационно-измерительных систем
Подождите немного. Документ загружается.

71
(3.100)
Таким образом, если осуществить корреляционную обработку ФМ ПСП
идеальным интегратором с временем интегрирования T, то даже при соблюде-
нии условия (3.84), исключающего срыв автосопровождения по частоте, будут
наблюдаться потери энергии сигнала, связанные с эффектом Допплера (3.96).
При этом потери определяются в основном изменением длительности элемен-
тов сигнала для случая, когда тактовая частота не зависит от несущей. Потери
будут зависеть от разности
( )
t
∂
ω∆
и частоты
( )
t
пг
ω
перестраиваемого генера-
тора. Расчет будет тот же (3.96 - 3.100), только вместо R
(k)
следует подставлять
динамическую ошибку (
( ) ( )
k
фапч
k
RR −
), что отражает соответствующий астатизм
ФАПЧ. Кроме того, наличие допплеровского эффекта для указанных случаев
накладывает ограничения сверху на количество элементов сигнала (3.97 -
3.100). Пои этом максимально возможное количество элементов (база) сигнала
значительно зависит от вида (траектории движения цели) и уменьшается тем
больше, чем больше величина и степень производных R
(k)
(либо динамических
ошибок
( ) ( ) ( )
kkk
RRR −=∆
ФАПЧ), т.е. при равных величинах
( ) ( )
( )
kk
RR ∆
"вклад" производных в потери энергия сигнала пропорционален N
l
, где l - поря-
док усечения ряда. При фиксированном N<N
max
величина выходного эффекта
(3.91, 3.96) тем больше, чем меньше величины и степени производных (R
k
) и
чем выше порядок астатизма ФАПЧ и меньше динамические ошибки ∆R
(k)
при
тактовой частоте, зависимой от несущей.
Например, если α=0,5 и R≈10 км/с, то
4
4
8
max
103
10
103
2
1
2
R
C2
N ⋅=
⋅⋅⋅
=
α
=
Если α=0,5 и ∆R
(1)
= 0,5 м/с (ошибка слежения за радиальной скоростью
цели), то
8
8
)1(
max
106
5
,0
103
2
1
2
R
C2
N ⋅=
⋅⋅⋅
=
∆
α
=
Из формулы (3.100) и приведенных примеров следует, что оценивание и
отслеживание частоты сигнала существенно увеличивают базу широкополосно-
го сигнала, которую допустимо использовать в радиотехнической системе с за-
данными потерями в энергетическом потенциале.
72
3.5. Влияние нестабильности тактовой частоты
на качество корреляционной обработки сигнала,
фазоманипулированного по закону
псевдослучайной последовательности
Для случаев, когда тактовая и несущая частоты независимы, либо зависи-
мы и выполняется условие автосопровождения по частоте
( ) ( )
5
0
10
T
2
0T ≤τω
π
<<ω−ω
∋∂∂
,
то
1cos ≈τω
∋∂
и выходной эффект запишется в виде
( )
∑ ∑∑
∫∫
= =
∋
=
τ
τ
τ
τ−
δ−τ=
−≈
∋
=
∋
∋
∋
∑
N
1i
i
1k
k
N
1i
ii
1i
вых
tNdtdtZ
i
1k
k
, (3.101)
где
∋∋
τ−τ=δ
kk
t
- нормально распределенные, центрированные величины с
дисперсиями
2
k
σ
.
Тогда
∑
=
δ
i
1k
k
t
- также нормально распределенная центрированная величина
с дисперсией
∑
=
σ=σ
∑
i
1k
2
k
2
i
.
Величина
∑
=
δ
i
1k
k
t
- случайная с распределением
2
i
2
i
1k
k
2
t
2
i
i
1k
k
e
2
tP
∑
∑
∑
δ
δ
−
=
=
πσ
=
δ
∑
, (3.102)
при
[
)
∞∈δ
∑
=
,0t
i
1k
k
,
математическим ожиданием
Σ
=
σ
π
=
δ
∑
2
tM
i
1k
k
; (3.103)
Следовательно, среднее значение
i
t
вых
δ
Ζ
можно получить из (3.101):
73
∑ ∑∑ ∑
= =
∋
=
δ
=
δ
σ
π
−τ=δ−τ=Ζ
N
1i
i
1k
2
k
N
1i
t
i
1k
k3
t
вых
2
NtN
i
i
. (3.104)
Поскольку
0
ZN =τ
∋
и
σ=σ=σ
−1kk
(3.104) можно представить в виде
τ
σ
π
−≈σ
π
−=
∋
=
δ
∑
2
1
0
N
1i
0
t
вых
N
2
3
2
1Zi
2
ZZ
i
. (3.105)
Для
∋
τ<<σ
T
T
F
F∆
≈
τ
σ
∋
, (3.106)
где
T
T
F
F∆
- кратковременная относительная (неучтенная) нормальная нестабиль-
ность частоты.
Действительно,
2
k
TKT
t
t
1
11
FF
∋
∋
∋
∋
τ
δ
≈
τ
δ
+τ
−
τ
=−
.
Тогда
∋
τ
δ
=
∆
t
F
F
T
T
.
Таким образом, (3.105) можно записать как
∆
π
−=
δ
2
1
T
T
0
t
вых
N
F
F
2
3
2
1ZZ
k
, (3.107)
( )
2
T
T
2
max
F
F
8
3
N
∆
πα
=
. (3.108)
Очевидно, что нестабильность генератора тактовой частоты ограничивает
количество элементов N
max
(3.108) псевдослучайной последовательности, кото-
рое можно использовать в системе.
Например, если
2
1
=α
и
5
T
T
10
F
F
−
=
∆
, то
10
max
105,2N
3
⋅=
Пример показывает, что нестабильность тактовой частоты мало влияет на
потери энергетического потенциала. Поэтому допустимо использовать доста-
точно большие значения базы широкополосного сигнала.
74
3.6. Совместное влияние эффекта Допплера и нестабильностей
частоты генераторов на качество корреляционной
обработки ФМ ПСП сигнала
Если ни одним из аффектов, рассмотренных ранее, пренебречь нельзя, не-
обходимо учитывать их совместное воздействие на выгодный эффект корреля-
тора.
Замечая, что при выполнении условия (3.94) достаточно учитывать лишь
влияние эффектов на длительность элементов, напишем в выходной эффект в
виде (3.101)
∑ ∑
= =
∋
δ−τ=
N
1i
i
1k
kвых
tNZ
, (3.109)
где
0
k
k
0
k
k1k
t1t
ω
ω
τ−δ≈τ−
ω
ω
−τ=δ
∂
∋∋
∂
∋
,
k
tδ
- нормальная случайная величина с
[ ]
[ ]
2
k
2
kk
tM ,0tM σ=δ=δ
Тогда (3.109) можно записать следующим образом:
∑ ∑
= =
∂
∋∋
ω
ω
τ−δ−τ=
N
1i
i
1k
0
k
kвых
tNZ
. (3.110)
Определим средний выходной эффект Z
вых
из (3.110), осредняя по ансамб-
лю центрированную нормально распределенную величину
∑
=
δ=δ
i
1k
ki
tt
c
[ ]
0tM
i
=δ
и
[ ]
∑
=
σ=δ
i
1k
2
k
2
i
tM
∑
=
σ
−
∋
δ
σ
π
+
σ
−τ=
N
1i
2
b
i
i
i
i
t
вых
2
i
2
i
i
e
2
2
b
erfb
NZ
, (3.111)
где
( ) ( )
∑∑
=
∋
∂
=
∋∂∋
ω
ϕ−τϕ
≈ω
ω
τ
=
ω
ωτ
=
i
1k
0
k
i
1k
00
k
i
0i
b
,
[ ]
2
i
2
i
tM δ=σ
.
Обычно
0k
σ=σ=σ
δ
.
Тогда

75
∑
=
σ
∋
δ
σ
π
+
σ
−τ=
N
1i
i2
b
i
i
i
t
вых
2
2
i
i
ei
2
i2
b
erfbNZ
. (3.112)
Легко заметить, что при
0b
i
=
(3.112) вырождается в (3.105, 3.107), а при
0=σ
(3.112) вырождается в (3.96), поскольку
( )
1erf =∞
Из примеров 3.45 следует, что вполне возможен случай соизмеримости
1max
N
,
2max
N
и влияния рассматриваемых эффектов. Для такого случая расчет
следует производить по формуле (3.112).
При заданном ослаблении α выходного эффекта максимально допустимое
количество элементов
max
N
сигнала определяется также из (3.112).
Проанализировав (3.112), можно сделать заключение, что для приближен-
ных расчетов можно пользоваться (3.105),. даже если
i
b
на порядок меньше σ,
и - (3.96), если
i
b
на порядок больше σ.
3.7. Влияние нестабильности временной задержки
(синхронизации) на выходной эффект приемника
Если приемник работает в режиме слежения за временем задержки, то
ошибка синхронизации скажется на средней величине выходного эффекта сиг-
нала, используемого, для передачи информации или измерения радиальной
скорости.
Определим среднее значение выходного эффекта в предположении, что в
течение периода ФМ ПСП сигнала ошибка синхронизации меняется незначи-
тельно. В режиме синхронизации в интервале задержек
1
t
1 ≤
τ
δ
≤−
∋
нормиро-
ванную автокорреляционную функцию сигнала можно представить в виде
(3.113)
∋
τ
δ
−=ρ=
t
1
Z
Z
c
. (3.113)
Поскольку канал временной синхронизации достаточно узкополосный, с
большим основанием можно считать, что ошибка синхронизации - нормальный
стационарный центрированный процесс с распределением
σ
τ
δτ
−
σπ
=
τ
δ
∋∋
2
c
2
q
2
1
exp
2
1t
P
, (3.114)
где
76
τ
δ
=σ
∋
2
2
с
t
M
.
В этом случае, учитывая (3.113 и 3.114), плотность вероятности значения ρ
определяется как
( )
( )
2
c
2
2
1
c
e
12
t
t
p2P
σ
ρ−
−
∋
∋
σ
⋅
π
=
ρ∂
τ
∂
∂
τ
δ
=ρ
. (3.115)
Тогда можно найти математическое ожидание
[ ]
ρM
среднего уровня авто-
корреляционной функции ρ:
[ ]
( )
∫
−σ
π
−
σ
=ρ
σ
ρ
π
=ρ
σ
−
σ
ρ−
−
1
0
2
c
2
1
c
c
2
c
2
2
1
c
e1
2
2
1
erfde
2
M
.
Для
[ ]
ρ≤σ M3,0
c
формула (3.116) записывается проще:
[ ]
c
2
1M σ
π
≈ρ
. (3.117)
Поскольку среднее по времени (за достаточное количество периодов сиг-
нала), в течение которых процесс
( )
ttδ
считается стационарным, равным сред-
нему по ансамблю, то потери выходного эффекта можно рассчитывать по
(3.117). При этом систематические ошибки полагают учтенными, а динамиче-
ские - малыми. σ
с
реальных систем связи достигает
21
1010
−
−
÷
. Поэтому потери
энергии
c
2
σ
π
составляют
( )
%88,0 ÷
. С такими потерями следует считаться в
системах, в которых имеют место другие многочисленные потери и затухания.
3.8. Одновременное влияние расстроек, возмущений и
неидеальностей на выходной эффект приемника
Система, использующая ШШС типа ФМ ПСП сигнал, может предназна-
чаться как для передачи цифровой или аналоговой информации, так и для изме-
рения параметров движения цели, отображающихся на параметрах сигнала. Ес-
ли предположить, что система работает с когерентным сигналом и осуществля-
ет его когерентную обработку, то даже в случае передачи информации она от-
слеживает два параметра: фазу и задержку.
Пусть сигнал имеет вид
( ) ( ) ( )
[ ]
( )( )
π+ψ+δ−ω−ω
∋
=
τµ
∂
∋
τ−−δ−λδ−λ=δ−
∑
kc
attj
N
k
T
ektttSGttS
0
11
1
0
, (3.118)
где

77
( )
t
T
λ
- срезающая прямоугольная функция длительности, равной периоду
сигнала Т;
( )
t
∋
τ
λ
- срезающая прямоугольная функция длительностью, равной дли-
тельности элемента τ
∋
;
S
0
- амплитуда;
G
µ
- мультипликативный множитель, учитывающий затухание амплитуды
при распространения радиоволн, при обработке и т.д.;
ψ
0
- суммарная ошибка по фазе за счет флуктуации фазовой диаграммы
направленности, изменений режимов работа РТС и т.д.;
а
к
- алгоритм - (код) ФМ ПСП сигнала;
ω
∂
- как и прежде расстройка по частоте.
На выходе высокочастотного тракта до перемножителя сигнал исказится и
станет (рис. 3.12) равным
( ) ( ) ( )
[ ]
( )( )
00
1
1
0
ψ+π+δ−ω−ω
∋
=
τλ
∂
∋
τ−−δ−δ−λµ≈
∑
k
attj
N
k
Tвч
ekttUttKStS
, (3.119)
где К
вч
- коэффициент передачи высокочастотного тракта;
( )
( )
[ ]
τ∈=−λ
=⊕=−
=
∋τ
−
−−
τ
∋
∋
,t a tt
aaa e
U
m
kkm
ttП
вч
00
11
1
1
1
Опорный сигнал имеет вид
( ) ( ) ( )
[ ]
( )
∑
=
ω+π
∋τ
τ−−λλ=
∋
N
i
taj
Ton
i
eitttS
1
0
1
. (3.120)
Предположим, что приемник осуществляет корреляционную обработку
сигнала с идеальным интегрированием.
Тогда на выходе коррелятора в момент t=T согласно (3.119) и (З.120) полу-
чим
( ) ( )
[ ]
( )
∫
+δ−=
λ
T
вых
dttStnttSZ
0
0
, (3.121)
где n(t) - нормальный белый стационарный шум.
Здесь и далее предполагается малость взаимокорреляционной функции
шума и сигнала по сравнению с автокорреляционной функцией сигнала, что
необходимо для надежных измерений R и R.
Поэтому
( ) ( )
∫
δ−≈
λ
T
вых
dttStt
SZ
0
0
. (3.122)
Учитывая, что

78
+=
22
uUuU
ReUReURe
,
можно записать
( ) ( ) ( ) ( )
( )
ZZ
tT
tT
*
вых
IIRedtt
SttSdttSttSReZ
21
0 0
0101
2
1
2
1
0
+=
δ−
+δ−=
∫ ∫
δ−
δ−
При этом
( ) ( )
( )
[ ]
( )
[ ]
∫
∑
∑
δ−
=
τ
δ
=
π⊕+ψ+ω−ω
∋∋∋
∋
∂
≈
×τλ−−λττ
λδ−λ=
tT
N
k
N
t
i
aattj
TTZ
dte
iti
ku
tttI
ik
0
1
2
2
0
0
поскольку огибающая меняется медленно к колебания осциллируют с частотой
2ω
0
.
Тогда
Zвых
IReZ
1
2
1
=
где
( )
∫
∑∑
= =
π+ψ+ω−ω−
∋∋λ
∂
λττ=
T
N
k
N
i
attj
Z
dtiekuI
m
0
1 1
0
, (3.124)
так как обработка сигнала и измерение параметров осуществляется в режиме
синхронизации при соответственно малом времени запаздывания
∋
τ<δt
и ма-
лых расстройках.
Если предполагать, что суммарный набег фаз
∑
ψ=ψ
i
i0
создается про-
странственным качением четырех независимых антенн и фазовых диаграмм на-
правленности, имеющих, квадратичный характер, то
2
i
ii
θ⋅ξ=ψ
.
Ввиду того, что θ
i
распределен по нормальному закону, ψ
0
имеет распреде-
ление типа χ
2
с 8 степенями свободы, математическим ожиданием
∑
δ
=
ξ
1
2
i
oi
i
Д
и
дисперсией
∑
δ
=
ξ
1
22
i
oii
Д
. Здесь Д
oi
- дисперсия ошибки автосопровождения по уг-
лу.
Предположим также, что спектр флуктуаций частоты расстройки ω
∂
и
ошибки синхронизации δt достаточно узки по сравнению с полосами соответст-
венно ФАПЧ и канала синхронизации, т.е. что время корреляции процессов
превосходит времена интегрирования в каналах. В реальных системах это
обычно выполняется. Тогда можно считать, что ψ
c
, ω
∂
и δt неизменны в течение
79
периода ФМ ПСП сигнала).
В этом случае I
1Ζ
в соответствии с характером (3.58) будет кусочно-
глядкой функцией времени
( )
∫
∑ ∑
= =
π−
∋∋
ψ
λ
⋅λτ⋅τ=
T
N
k
N
i
aaj
j
Z
dteikueI
ik
0
1 1
0
. (3.125)
Определим Ζ
вых
для четырех интервалов задержки δt в предположении ма-
лости знаковой корреляционной функции ρ (3.61), что практически всегда вы-
полняется для непрерывного ФМ ПСП сигнала большой длительности.
На интервале
0<δ≤+τ−
λ∋
tt
(рис. 3.2)
( )
[ ]
(
)
( )
( )
(
)
( )
( )
∑
∫
∫
=
+τ−
τ−
ω−τ−Π−
δ−τ
+τ−
ω−τ−−Π−
ψ
−
+−
=
∋
∋
∂∋
∋
∋
∂∋
N
i
tk
k
tj
a
k
tk
tk
tj
a
kt
j
вых
dtee
ee
eReZ
m
вч
m
вч
1
1
1
1
1
1
1
1
0
12
1
2
1
. (3.126)
Обычно частота появления 1 либо 0 для псевдослучайных кодов равна
( ) ( )
2
1
01 ====
k
*
k
*
apap
Среднее по ансамблю a
m
для фиксированной позиции "к" определится как
( ) ( )
2
1
0011 ==⋅+=⋅=
mm
a
m
apapa
m
, (3.127)
где
m
a
m
a
−
- означает усреднение (a
m
) по ансамблю a
m
,
( ) ( )
km
apap =
, поскольку
1−
⊕=
kkm
aaa
имеет свойства, подобные a
k
.
Учитывая сделанные замечания и соотношения (3.61 и 3.127), можно найти
(3.126), пренебрегая слагаемым третьего порядка малости
τω−τω+
+
τ
δ
−λ−λ−−
τ
δ
−
=
ψ
∋∂∋∂
∋
−
∋
0
22
2
62
2
2
12
1
2
j
a
вых
e
NN
j
t
e
aa
ln
t
Re
T
Z
(3.128)
Аналогично, определяются I
λ
для случаев
11
ttиtt +τ≤δ≤ττ≤δ≤
∋∋∋
Далее, замечая, что слагаемые
22
2
62
ээ
NN
j τω−−τω
∂∂
и сомножитель e
jω
0
из
(3.128) присутствуют в выражении для z
вых
на любом интервале задержки δt ,
можно аналогично (3.67), используя такие же соображения, записать выраже-
ние для z
вых
в виде
80
( )
[ ]
0
22
2
62
1
2
101
2
ψ
∋∂∋∂
∋
τω−τω+
−
τ
δ
−−=
j
вых
e
NN
jRe
a
lnt
,aI
T
Z
. (3.129)
Небходимо отметить, что выражение (3.129) справедливо .для систем с ра-
зомкнутыми и с замкнутыми обратными связями в каналах слежения за δt и ω
∂
,
если под относительными расстройками понимать либо просто расстройки, ли-
бо соответствующие ошибки слежения за параметрами.
Рассмотрим, как распределены усилия элементов реальных схем по фор-
мированию выходного эффекта (3.129) или функции неопределенности в окре-
стности малых расстроек.
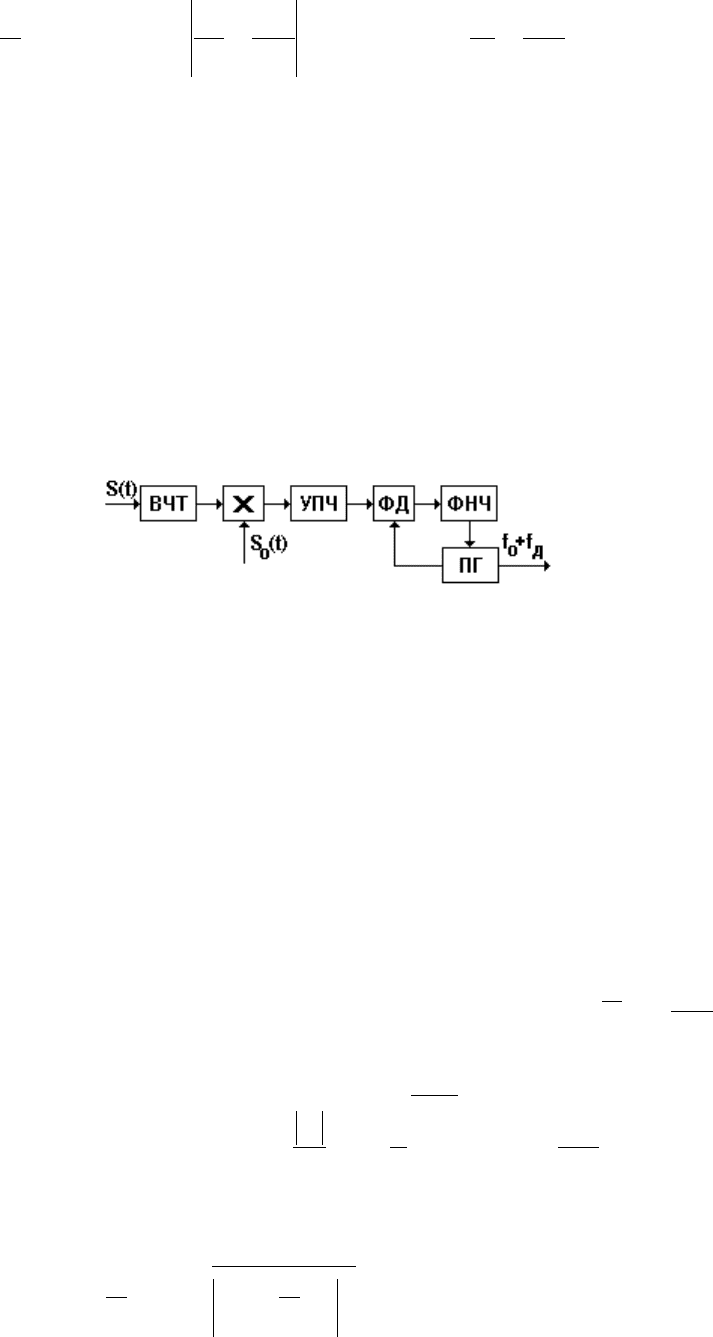
Пусть канал измерения реальной скорости имеет структуру (рис. 3.9), где
ВЧТ - высокочастотный тракт, Х - перемножитель, УПЧ – усилитель промежу-
точной частоты, ФД – фазовый детектор, ФМЧ – фильтр низких частот, ПГ –
перестраиваемый генератор.
Рис. 3.9
В таком канале измерения частоты операция перемножения принимаемого
и опорного сигналов разделена на две: операцию сжатия спектра (перемноже-
ния принимаемого, сигнала на ПСП) и операцию перемножения колебаний на
фазовой детекторе. Интегрирование перемноженных колебаний заменяется
фильтрацией частично узкополосным УПЧ перед фазовым детектором и основ-
ным фильтром нижних частот. Известная схема (рис. 3.9) осуществляет квази-
оптимальную обработку сигнала. Она способна выдавать оценки, близкие к по-
тенциальным. Неидеальности учтены формулой (3.129). Если, кроме того,
учесть еще неидеальность интегрирования (блоками УПЧ и ФНЧ), случайность
ψ
0
, настройку систем и устранение систематических ошибок
a
ln
,
2
0
0
ψ
ψ
, то вы-
ражение (3.129) можно представить в виде
( )
[ ]
( )
τω−
ψ−
τ
δ
−ϕ−µ=
∂
ψ
∂
∋
2
3
2
2
01
6
1
2
1
111
0
2
офнч
N
t
ТПfaZZ
, (3.130)
где
;Д
i
oi
i
i
∑∑
δ
=
ψ
ψ
ξ=
ψ−ψ=ψ
1
2
2
0
00
2
0
0