Алешин Г.В. Оценка качества информационно-измерительных систем
Подождите немного. Документ загружается.

101
Поскольку статистика стоимости определяется по техническим параметрам,
ее необходимо пересчитывать, для фазовых параметров. Разложение в ряд (линеа-
ризация) производится в окрестности такой точки
( )
0N01
X , ,X
, которая лежит
внутри часто используемого участки. Такой выбор вектора фазовых параметров
0
X
играет роль априорных данных о стационарной точке
opt
X
, поскольку благо-
даря интуитивной, но оптимизирующей роли инженера, расположение в окрестно-
сти используемых параметров одной из современных систем том же класса наибо-
лее вероятно.
Таким образом, благодаря линеаризации ограничений, задача упрощается и
появляется возможность получить решение в замкнутом виде. Требуется найти
c
n
1i
2
i
n
1j
j
X
X
r
r
DX
X
const
min
V
V
Dmin
2
1
j
i
+
+=
∆
∑
∏
=
=
,(4.15)
при ограничениях на параметры, полученных из (4.14):
C)XX(C)XX(CC
2121
n
1i
ioioi
n
1j
ojjoj
nn
1k
ok
=−
′
+−
′
+
∑∑∑
==
+
=
, (4.16)
0XX
jпредj
≥≥
,
предii
XX1 <>>
,
где
)r2q()r2q(nn
N
11211
+−+−+=
.
Хотя решение задачи (4,15), (4,16) выпуклого программирования можно най-
ти методом покоординатного спуска или одним из градиентных методов, решение
методом вырожденного динамического программирования оказывается проще и
позволяет при наличии ограничений определить общий подход к подобным сепа-
рабельным задачам.
Таким образом пря постановке рассматриваемой задачи о перераспределении
усилий блоков системы в процессе измерений радиальной скорости были сделаны
следующие допущения и ограничения:
- соотношение сигнал/шум q>>1, ввиду чего типовую структуру реального
измерителя, использующего ШШС, можно считать квазиоптимальной, обеспечи-
вающей получение эффективной оценки;
- учтены основные параметры системы, характеризующие качество блоков и
участвующие в оптимизации. Остальные параметры, например, надежность, вес,
фиксированы и равны часто применяемым значениям. Соответственно статистике
набирается из выборок при тех же фиксированных параметрах;
- измерения производятся в условиях устойчивого автосопровождения по уг-
лам и по частоте;
- поэтому схемы поиска сигнала должны оптимизироваться по другим крите-

102
риям;
- во всех приближениях (3.1), (3,9) и (4.15) оставлены лишь составляющие
низшего порядка малости;
- линейные ограничения (4.16) справедливы лишь на некотором участке во-
круг вектора ожидаемой оптимальности, "априорного"
0
X
. Длина участка про-
порциональна радиусу кривизны
( )
ii
XC
;
- дисперсия ошибки измерения скорости служит целевой функцией для опти-
мизации РТС на максимальной дальности.
В результате можно сделать следующие выводы:
1. При формализации задачи получена выпуклая целевая функция и линеари-
зованные ограничения на параметре.
2. Целевая функция пригодна для оценки первого приближения точности
проектируемых реальных измерительных систем того же класса.
3. При некоторых упрощениях, связанных с использованием ШПС, по целе-
вой функции можно оценить точность систем, работающих с простыми сигналам,
если принять во внимание эффекты, связанные о потерями энергии к мощности
сигнала при обработке.
Нормально постановка задачи параметрического сигнала справедлива для
любых измерительных и информационных систем, в том числе совмещенных, оп-
тимизация которых наложена в разделе 5.
4.5. Определение минимума целевой
функции
Воспользуемся методом динамического программирования для решения за-
дачи (4.I5), (4,16). Определим минимум первого слагаемого в предположении, что
ограничений на "фазовые" параметры X
j
нет, кроме X
j
>0:
{ }
∏
=
=
1
j
1
n
1j
j
X
1n
X
1
min)C(F
при
э1
n
1j
joj
CXC
1
=
′
∑
=
,
где
∑
−−
=
−=∆
111
1
r2qn
1j
oj1n
CCC
;
∑
=
′
+∆=
1
1
n
1j
ojojnэ1
XCCC
;
0X
j
=
.
103
Если воспользоваться результатом оптимизации для логарифма F
n1
(C), для
которого из-за его монотонности результаты не изменяется, то можно получить
1
1
n
1
1э
n
1j
oj
n
n
C
C
)C(F
′
=
∏
=
при оптимальном поведении
1
1
on1
э1
n
Cn
C
X
′
=
. (4.17)
Докажем справедливость (4.17).
Сделаем первый ваг оптимизации.
Тогда
э1
1o
э11
C
C
)C(F
′
=
при единственном поведении
1o
э1
min1
C
C
X
′
=
Для второго шага
22oэ1
1o
э2
XCC
C
min)C(F
′
−
′
=
при
2o
э1
min2
C2
C
X
′
=
.
Нетрудно увидеть, что
{ }
)XCC(F
X
1
min)C(F
22oэ1
2
X
э2
2
′
−=
.
Отсюда можно составить рекуррентное уравнение
{ }
)XCC(F
X
1
min)C(F
NoNэ1n
N
X
эN
N
′
−=
−
. (4.18)
Доказательство (4.18) проведем покоординатным способом нахождения ми-
нимума.
Докажем справедливость решения методом математической индукции. Реше-
ние справедливо для N=1,2. Значит, если оно справедливо для N=n
1
, то оно долж-
но быть справедливо и для N=n
1
+1.
Действительно, из (4.18) получим

104
{ }
1n
1
э1
1n
1j
oj
N
1n)1n(oэ1
n
1j
oj
1n
X
э11n
1
1
11
1
1
1
1
n
1
1n
C
C
N
XCC
C
X
1
min)C(F
+
+
=
++
=
+
+
+
′
=
′
−
′
=
∏∏
+
,
при
)1n(o
э1
1n
1
1
C)1n(
C
X
+
+
′
+
=
.
Поскольку решение справедливо и для N=n
1
+1, то оно справедливо и для
произвольного N.
Определим минимум суммы слагаемых в предположении лишь X
i
≥0:
∑
=
=∆
2
2
n
1i
2
i2n
Xmin)C
(F
при
[ ]
2
n
1i
oiioioi
CC)XX(C
2
≤+−
′
∑
=
,
или
2э
n
1i
n
n
1i
ioiioi
CCXCXC
2
2
2
=∆−
′
≥
′
∑ ∑
= =
,
0X
i
≥
,-
где
2
n
1i
oioi
r2qn
1i
oiэ2
CXCCC
2222
−
′
+=
∑∑
=
−−
=
,
∑
−−
=
−=∆
222
2
r2qn
1i
oi2n
CCC
.
На первом шаге получаем
2
о1
2э
э21
С
C
)C(F
=
при
о1
э2
1min
С
C
X
′
=
.
На втором шаге получаем рекуррентное уравнение
{ }
{ }
[ ]
)XCC(FXmin
С
XCC
Xmin)C(F
22o2э1
2
r
X
2
о1
22o2э
2
r
X
э22
22
′
−+=
′
′
−
+=
при
э222o11o
CXCXC =
′
+
′
.
Методом индукции можно доказать справедливость этого решения для любо-
105
го n
2
:
[ ]
)XCC(FXmin)C(F
2n2on2э1n
2
2nэ22n
2
′
−+=
+
.
Поэтому для второго шага получим
2
2o
2
1o
2
э2
э22
n
)C()C(
C
)C(F
′
+
′
=
при
2
2o
2
1o
2o
э2
min2
)C()C(
CC
X
′
+
′
′
=
,
а для третьего – соответственно
2
3on
2
2on
2
1on
2
э2
э23
)C()C()C(
C
)C(F
′
+
′
+
′
=
,
при
2
3o
2
2o
2
1o
3o
э2
min3
)C()C()C(
CC
X
′
+
′
+
′
′
=
.
Учитывая соотношения F
2
и F
3
, предположим, а затем и докажем по индук-
ции, аналогично доказательству (4.17), что
∑
=
′
=
2
2
n
1i
2
oi
2
э2
э2n
)C(
C
)C(F
при
∑
=
′
′
=
2
2
min2
n
1i
2
oi
on2э
n
)C(
CC
X
.
затем определим целевую функцию (4.15):
[ ]
)C(F)C(Fmin)C
(F
2211
2
1
nnnn
C
C
∆+∆=∆
∆
∆
при
CCC
21
nn
∆≤∆+∆
.
В соответствии с полученными решениями (4.17) и (4.19) выражение для F
запишем в виде
c
2
n
n
n
C
C
D
)CD(
)BC(
A
min)C(F
2
1
1
2
1
+
ε
∆−
+
+∆
=∆
∆
∆
106
при
CCC
21
nn
∆≤∆+∆
,
где
∏
=
′
=
1
1
n
1j
oj
n
1
CnconstA
;
∑
=
′
=
1
n
1j
ojoj
XCB
;
Методом Ньютона-Рафсона (касательных) [6] оптимальное поведение на по-
следнем шаге
opt 2
С∆
определим из уравнения
[ ]
optn
n
optn
CD
CCB
n
A
2
1
2
1
1
2
∆−=
∆−∆+
ε
+
. (4.20)
Для
opt 2
n
С∆
(из (4.20) получим рекуррентную формулу,
[ ]
[ ]
2
1
1
1
1
1
2
2
2
1
2
2
+
−
−
∆−+∆++ε
ε∆−+∆
−=∆
n
)k(n
)k(n
)k(n
CBC)n(A
n
n
ACBC
DC
, (4.21)
при
[ ]
D,С
)(
n
0
12
∈∆
где k - номер шага итерации.
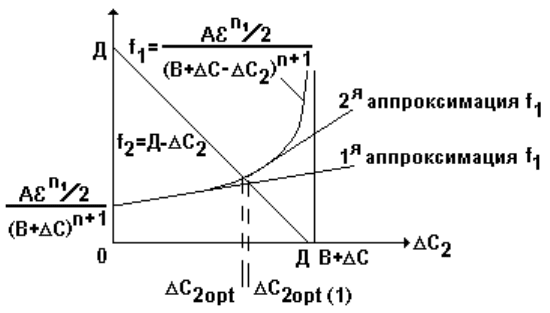
На рис. 4.3 показана процедура последовательного определения
opt 2
n
С∆
.
Обычно
)n(A
n
)BC(C)BC( 1
2
1
1
+ε>>+∆∆>>+∆
Тогда
( )
c
)n(n
n
optn
D
BC
n
A
)
DBC(
A
)C(F
,
)BC(
n
A
DС
+
+∆
ε+
−+∆
≈∆
+∆
ε
−≈∆
+
+
12
2
1
1
1
11
1
2
2
2
(4.22)
и
optnoptn
CCC
21
∆−∆=∆
Параметры
opt j
X
и
opt i
X
определяется из (4.17) и (4.19), а оптимальные тех-
107
нические параметры системы – из уравнений
)X(yy
optjoptjoptj
=
Оптимальные стоимости блоков находятся из уравнений одно- или много-
мерных линейных ограничений.
Рис. 4.3
Таким образом, для области хорошей аппроксимации кривых регрессии ли-
нейными функциями получено оптимальное распределение стоимостей блоков и
оптимальные параметры, при которых система обеспечивает минимум дисперсии
ошибки измерений радиальной скорости при заданной общей структуре системы
(рис. 4.2) на максимальной дальности и при ограниченных ассигнованиях.
С развитием соответствующей техники и производства стоимость блоков
уменьшается, а в области предельных значений параметров (y
imax
) и (y
imin
) умень-
шается незначительно. Поэтому уменьшение крутизны ограничений (C
1
oi
`
) при
неизменных параметрах, близких к предельным, как и сами величины y
imax
и y
imin
отражает природу ограничений и экономико-техническое состояние данного про-
изводства.
Из соотношения для целевой функции F видно, что между параметрами А и
E, В и D существуют некоторые противоречия, отражающиеся на величине опти-
мальной точности.
Из (4.22) можно увидеть пути дальнейшего совершенствования данной аппа-
ратуры и технологии производства.
Кроме того, из (4.22) следует, что поскольку предел измерений радиальной
скорости определяется ограниченным знанием скорости распространения радио-
волн D
c
, то существует предел и для ассигнований. Если требуется получить дис-
персию F(
∆C)
в
∆f
зг
большую, чем D
c
, то из (4.22) получим значения максималь-
ных финансовых ассигнований на оптимальную систему
108
∆C
max
=
)1n(2
c
1
n
1n
c
n
1n2
2
1
c
21
1
1
1
)
D)1(
A
D(n]D)1[(
A
4
n
D)1(
A
B
+
+
−
−α
+−α
ε
+
−α
+
. (4.23)
Как и результаты (4.22), (4.17), (4.19) формула (4.23) справедлива для опти-
мального решения, достаточно близкого к вектору X
0
.
4.6. Оптимальные параметры систем
Учитывая полученные результаты, запишем в принятых обозначениях опти-
мальные параметры и стоимости системы в виде, удобном для расчетов:
∆
∆ ∆
∆ ∆
C D
C B C A
n
n
A n C B C
k
k
k
n
2
2 1
1
1 2 1
2
1
1
2
2
1
( )
( )
( )
[ ]
( ) [ ]
= −
+ −
+ + + −
−
−
+
ε
ε
при
( )∆ ∆C B С+ >>
2
( ) ( )∆С B
n
A n+ >> +
1
1
2
1ε
;
∆
∆
∆ ∆ ∆C D
A
n
C B
C C C
opt
n
opt opt2
1
1
1 2
2
1
≅ −
+
= −
+
ε
( )
, .
Согласно (4.17) и (4.190) определим “фазовые параметры X
j
X
C C C X
nC
kopt
j j j
jj
k
=
− +
′
′
∑∑
1 0 0 0
0
.
Отсюда можно получить также все технические параметры
y y X
jopt jopt jopt
= ( ):
а) отношение
α
j
ширины диаграммы направленности антенны по мощности в
плоскости
θ
x
к величине дисперсии соответствующей ошибки углового сопрово-
ждения
α
jopt
jopt
jopt
X
X
=
−
2
1
2
2
;
б) длительность сигнала Topt, равную времени интегрирования
109
T X
opt
jopt
=
1
3
;
в) отношение а
opt
полосы пропускания высокочастотного тракта по половине
уровня максимума к ширине спектра ШШС “по нулям” (рис.4.3), где сплошная
кривая (1) - точная зависимость а
opt
(Xjopt), а пунктирная (2) - приближенная
а
B
X
opt
jopt
=
+
−
ln
,
2
1
где
B = −1 ρ
, при а
opt
=2 погрешность составляет 10/; при а
opt
→ ∞
погрешность
стремится к 0;
г) полоса системы фазовой автоподстройки частоты
П
X
T
фап opt
jopt
=
−
ln
,
1
1
0
где T
0
- фиксированное время интегрирования, равное ожидаемому значению
T=T
0
;
д) абсолютное значение результирующей ошибки
δt
opt
канала синхронизации
при известном законе движения
δ τt X
opt
э jopt
= −( );1
е) среднеквадратическая ошибка
σ
∂topt
канала синхронизации
σ
π
τ
δtopt э jopt
X= −
2
2
1( );
ж) коэффициент шума Ш
увч1opt
усилителя высокой частоты наземного приемника
Ш
X
ув opt
jopt
4
1
= ,
з) суммарная шумовая температура Т
0ачopt
наземной приемной антенны
Т
0ач opt
=1/X
jopt
,
и) остальные параметры, участвующие в оптимизации
y
jopt
=X
jopt
.
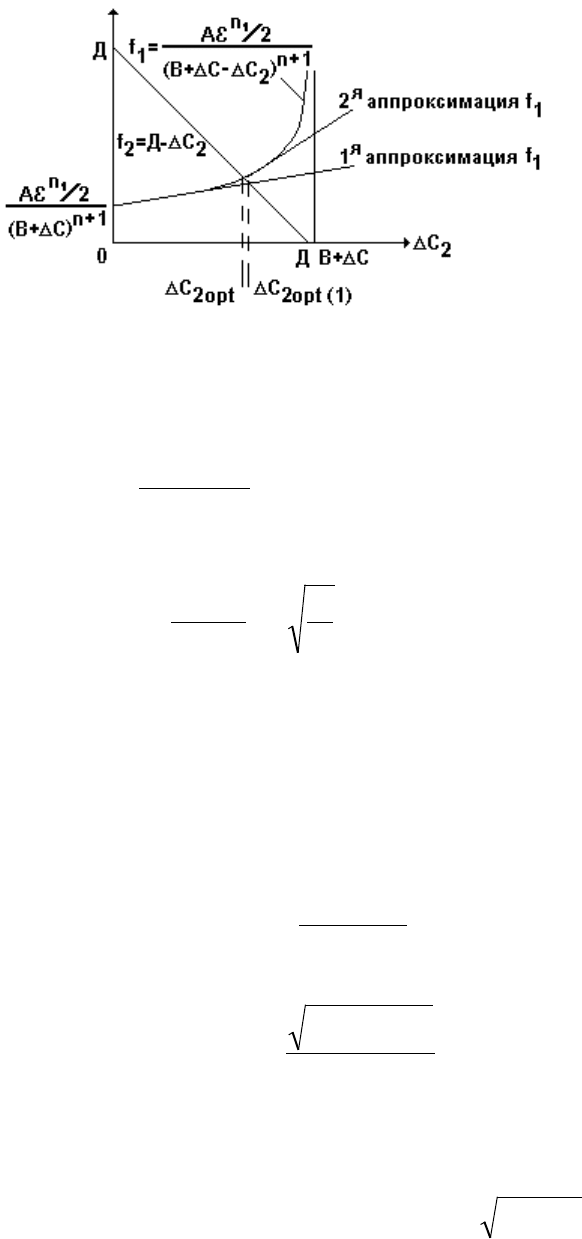
110
Рис. 4.3
“Фазовые параметры” X
jopt
определяются как
X
C
C
C C X C
jopt
i
i
i
n
i i i
i
n
i
=
′
′
+
′
−
=
=
∑
∑∑
0
0
2
1
2
0 0 0
1
2
( )
( ).
При этом
∆f
f
m
l
X
iopt
iopt
0
2= .
Оптимальные стоимости системы следует определить из выражения
C
k
=C
0k
+C
1
0k
(X
kopt
-X
k0
),
или С
k
=C
0k
+C
1
0k
(X
kopt
-X
k01
)+C
1
0j2
(X
k2opt
-X
ko2
) и так далее.
Определим область значений “фазовых” параметров, для которых решения
(4.17 - 4.19) считаются оптимальными. Эта область определяется из условия бли-
зости реальных C
i
(X
i
) к аппроксимирующим значениям линейных ограничений.
Предположим, что имеем нормированное значение
С X
C X
C X
iн i
i i
i i
( )
(
)
( )
=
0 0
(рис. 4.4) c некоторым радиусом кривизны в точке X
0i
R X
C
C
к i
iн
iн
р
( )
( )
.
0
0
2
0
1
=
+
′
′′
Для некоторого малого по сравнению с радиусом R
кр
(X
0i
) участка АО кривой
C
iн
, прогноз этой функции по дуге окружности радиуса R
кр
c центром в точке O
считаем удовлетворительным.
Тогда, пользуясь известным [18] выражением
R hR
к1
2=
р
для зависимости
дальности до горизонта R
г
от высоты расположения антенны h и предполагая