Абраменко И.Г. Теория автоматического управления
Подождите немного. Документ загружается.

31
По характеру параметров различают стационарные (параметры посто-
янны) и нестационарные САУ (параметры меняются).
Каждый из этих классов подразделяется на системы с сосредоточенны-
ми и распределенными параметрами
По количеству управляемых величин выделяют одномерные (одна
управляемая величина) и многомерные САУ (таких величин несколько)
В зависимости от принадлежности источника энергии, при помощи
которого создаётся
управляющее воздействие, системы могут быть прямого и
непрямого действия. В системах прямого действия используется энергия
управляемого объекта. К ним относятся простейшие системы стабилизации
(уровня, расхода, давления и т.п.), в которых воспринимающий элемент через
рычажную систему непосредственно действует на исполнительный орган
(заслонку, клапан и т.д.). В системах непрямого
действия управляющее воз-
действие создаётся за счёт энергии дополнительного источника.
1.11. Обобщенная функциональная схема САУ
При изучении конкретной САУ ее удобно предварительно формально
разделить на отдельные типовые элементы, выявить взаимосвязи между эти-
ми элементами и отобразить их в виде функциональной схемы. Функцио-
нальной схемой САУ называют условное графическое изображение, отра-
жающее функции, выполняемые отдельными элементами системы и связи
между этими элементами.
В общем случае САУ представляют собой комплексы взаимодейст-
вующих элементов, работа которых основана на различных физических
принципах (механических, электрических, гидравлических и т.д.). Однако,
несмотря на это многообразие, элементы САУ могут быть сведены к не-
скольким основным типам, различающимся по
их назначению. Соответст-
венно этому можно говорить об обобщенной функциональной схеме. Такая
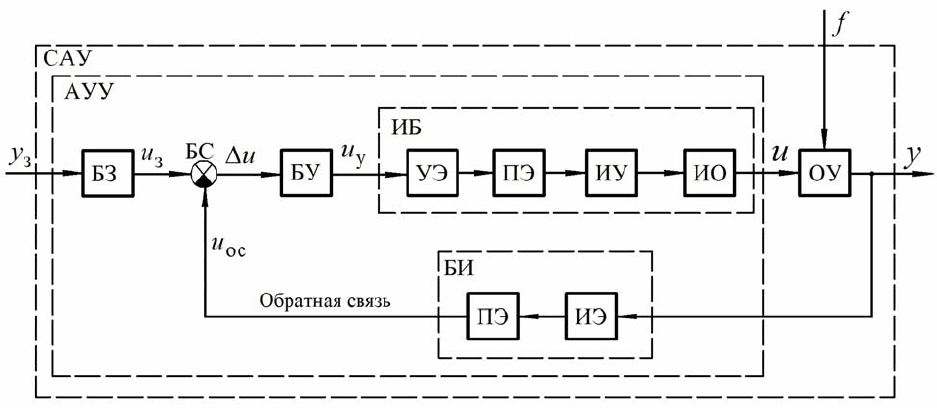
схема представлена на рис. 1.9.
32
Рис. 1.9
Частями функциональной схемы являются условные изображения
функциональных блоков и элементов, а также связей между ними в виде ли-
ний со стрелками. Стрелки показывают направление передачи сигналов
взаимодействия. Функциональные блоки и элементы изображают в виде
прямоугольников, внутри которых записывают их название.
Как видно из рисунка, типовыми функциональными блоками САУ
яв-
ляются:
- блок задания БЗ, служащий для введения в систему требуемого закона
изменения управляемой величины – задающего воздействия
з
()yt
и преобра-
зования его в величину сигнала задания
з
()ut
, удобную для использования
(чаще всего в электрическую величину – напряжение);
- блок измерения БИ, который измеряет действительное значение
управляемой величины
)(ty
и преобразует его в величину сигнала обратной
связи
ос
()ut
;
- блок сравнения БС, выполняющий сравнение сигналов
з
()ut
и
ос
()ut
.
Выходной сигнал этого блока
()ut
Δ
определяется из соотношения
зос
() () ()ut u t u tΔ= −
и называется сигналом рассогласования или сигналом
33
ошибки. Зачерненный сектор показывает, что величина, входящая в него, вы-
читается.
Допустимым также является вместо зачернения сектора применять
знак “-”;
- блок управления БУ, определяющий в соответствии с алгоритмом
управления величину необходимого сигнала управления
у
()ut
;
- исполнительный блок ИБ, вырабатывающий управляющее воздейст-
вие
)(tu
, непосредственно прикладываемое к ОУ.
Каждый из перечисленных блоков может в свою очередь состоять из
нескольких более простых частей – элементов. Так на приведенной схеме по-
казаны: усилительный элемент УЭ, служащий для усиления поступающих
сигналов; преобразующий элемент ПЭ, обеспечивающий совместную работу
элементов с различной физической природой; измерительный элемент ИЭ.
В состав исполнительного
блока обычно входят еще две части: испол-
нительное устройство ИУ и исполнительный орган ИО. В качестве ИУ ис-
пользуют двигатели различных типов или другие источники энергии. ИО
обычно являются заслонки, вентили и другие дозирующие устройства. Ино-
гда ИО составляет с ОУ единое целое и тогда целесообразно относить его к
ОУ.
В
общем случае достаточно сложная САУ может включать несколько
контуров обратных связей. Тогда обратную связь, передающую информацию
о значении управляемой величины на вход САУ, называют главной обрат-
ной связью, а все остальные – местными.
На функциональных схемах конкретных САУ указывают не общее на-
значение блоков, а их конкретное наименование, например, двигатель М,
ти-
ристорный преобразователь ТП, тахогенератор ТГ.
1.12. Примеры САУ
Пример 1.
34
Система автоматической стабилизации угловой скорости двигателя
постоянного тока с независимым возбуждением, реализующая принцип ра-
зомкнутого управления по возмущающему воздействию.
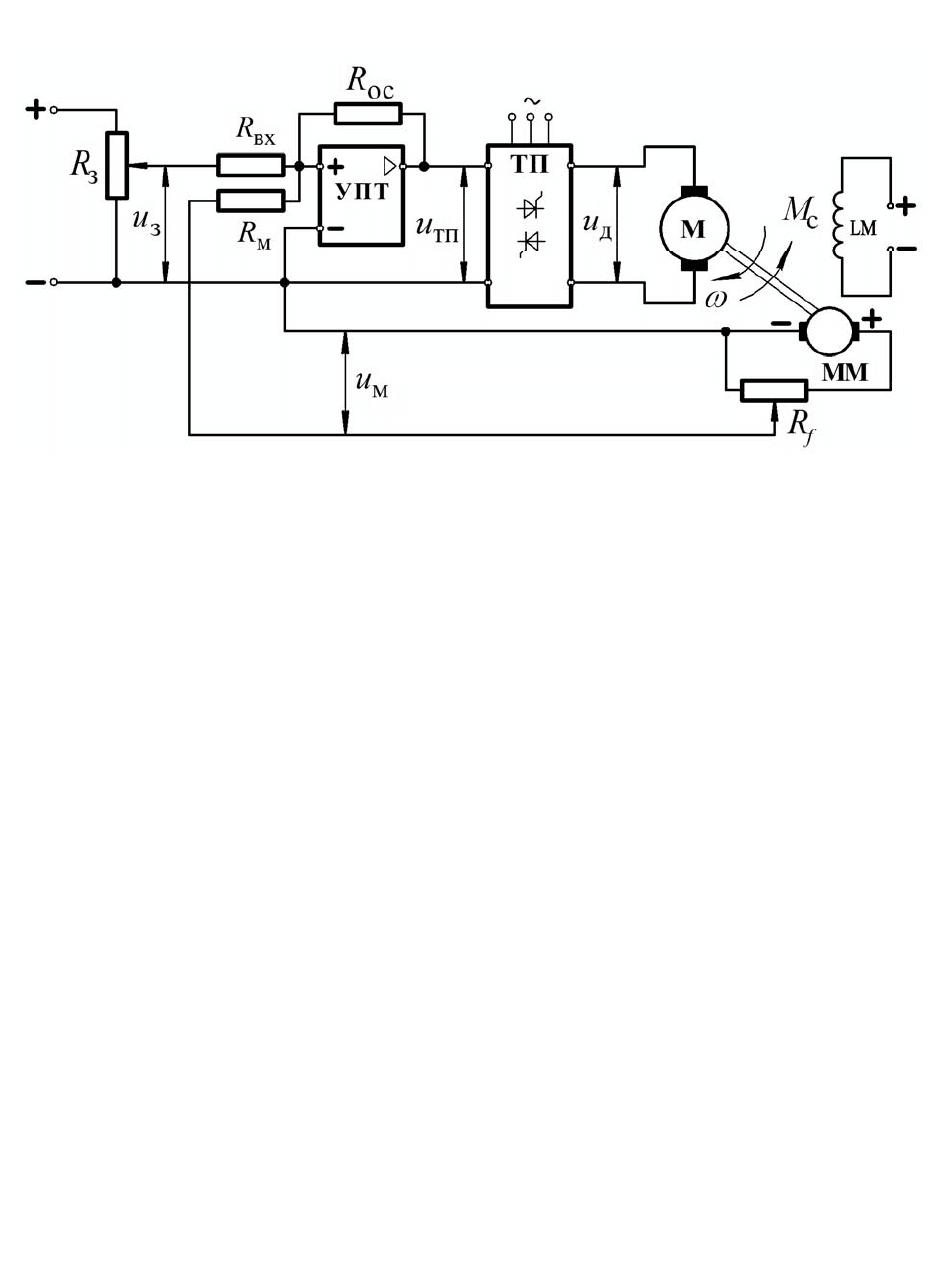
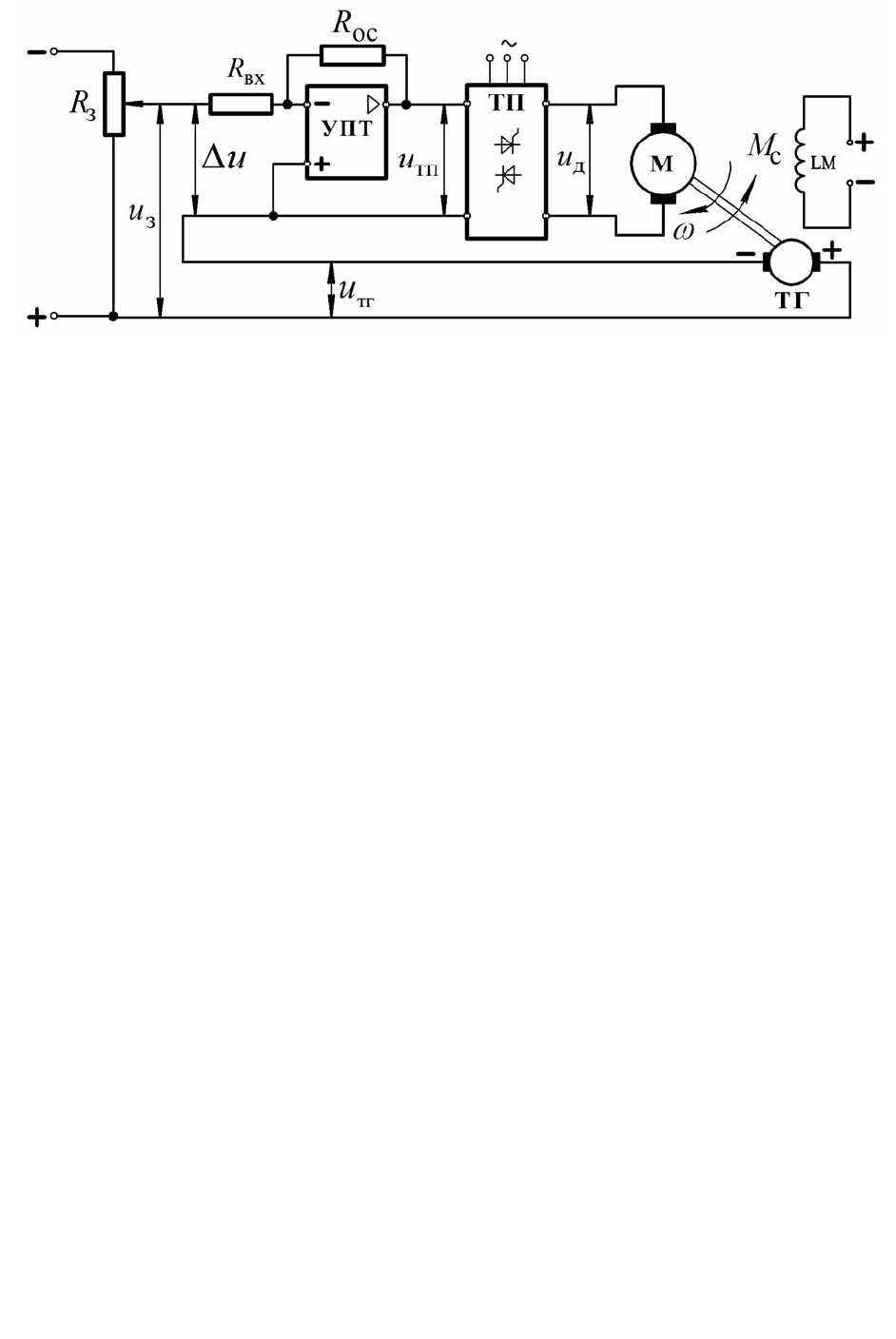
Принципиальная схема системы приведена на рис. 1.10.
Рис. 1.10
Здесь: М - управляемый двигатель;
д
ω
- его угловая скорость; LM - об-
мотка возбуждения.
Блоком задания в схеме является потенциометр
з
R
. Напряжение
з
u
,
пропорциональное заданному значению скорости рабочего механизма
зззз
()uk
ω
ω
=⋅
, где
з
k
- коэффициент пропорциональности, снимается с
движка этого потенциометра и служит сигналом задания.
Для учета действия основного возмущающего воздействия - момента
статического сопротивления (момента нагрузки)
c
M
используются момент-
ная муфта ММ и усилитель постоянного тока УПТ. Моментная муфта вы-
полняет функцию блока измерения. Выходное напряжение муфты
м
u
, сни-
маемое с движка потенциометра
f
R
, пропорционально моменту
c
M
-
ммc
ukM=⋅
, где,
м
k
- коэффициент передачи муфты. Напряжения
м
u
и
з
u
суммируются с помощью сопротивлений
вх
R
и
м
R
на входе операционного
35
усилителя и усиливаются. Таким образом, УПТ выполняет функции сумма-
тора и усилителя напряжения.
Тиристорный преобразователь ТП состоит из управляемого выпрями-
теля, преобразующего переменное напряжение в постоянное, и системы им-
пульсно-фазового управления СИФУ, формирующей последовательность
импульсов, поступающих на управляющие электроды выпрямителя. ТП вы-
полняет функцию усилителя мощности.
Напряжение на якоре двигателя
д
u
является управляющим воздейст-
вием, его зависимость от скорости
з
ω
и момента
c
M
определяет алгоритм
управления разомкнутой системы:
тп з з м упт тпc
()uk kMkk
ω
⋅
=
⋅+ ⋅ ⋅
.
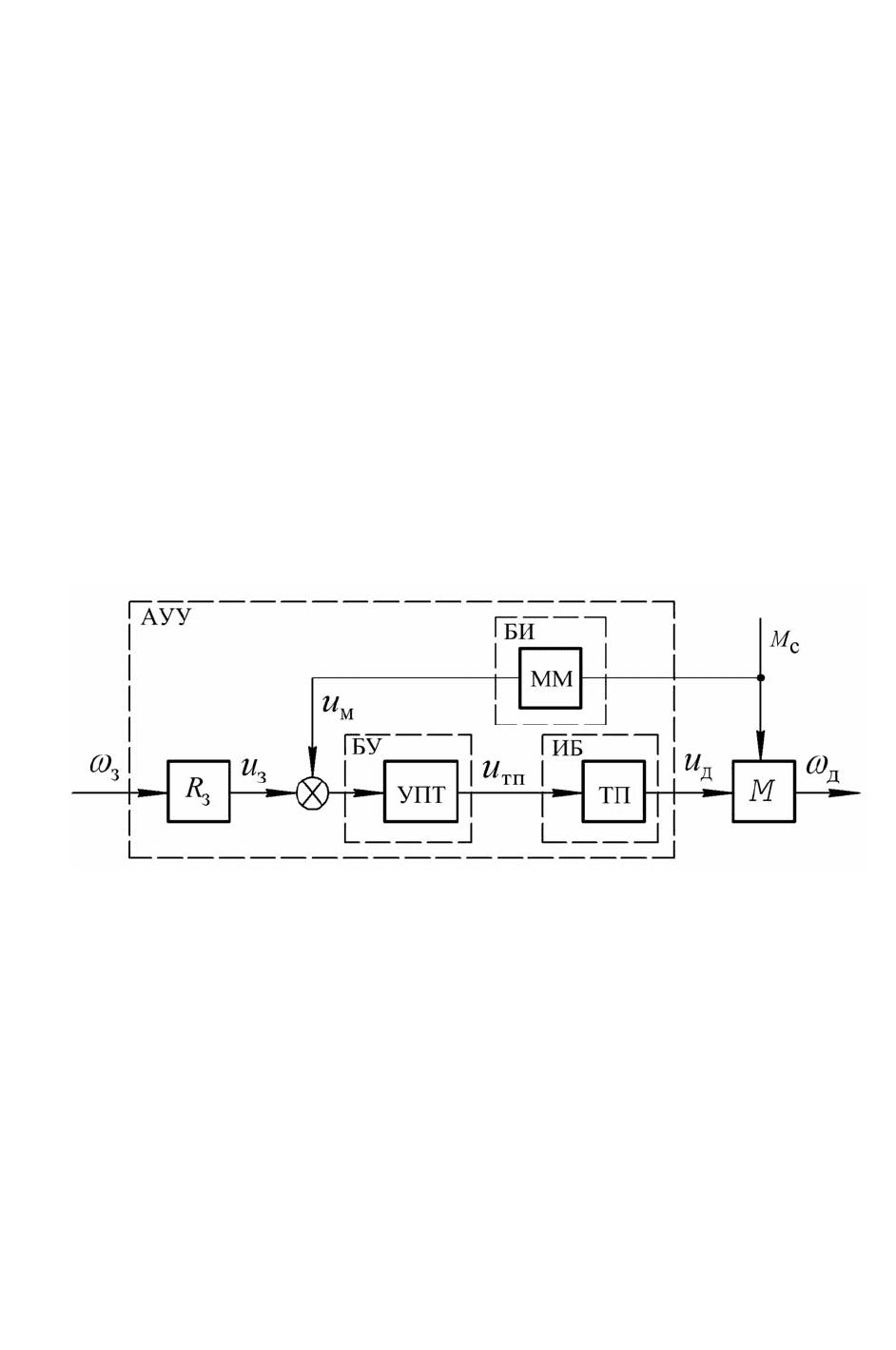
Функциональная схема системы приведена на рис. 1.11.
Рис. 1.11
При отсутствии связи по возмущению (
м
0k
=
)
напряжение
д
u
на входе
двигателя определяется лишь задающим напряжением
з
u
, снимаемым с по-
тенциометра
з
R
. При увеличении
c
M
оно остается постоянным, что приво-
дит к уменьшению скорости вращения двигателя.
При наличии связи по возмущению (
м
0k >
) с возрастанием
c
M
увели-
чивается
м
u
, в результате чего возрастают напряжения
тп
u
и
д
u
. Это приво-
дит к определенной компенсации влияния
c
M
и, следовательно, меняет зави-
36
симость скорости вращения двигателя от величины возмущающего воздейст-
вия
c
M
.
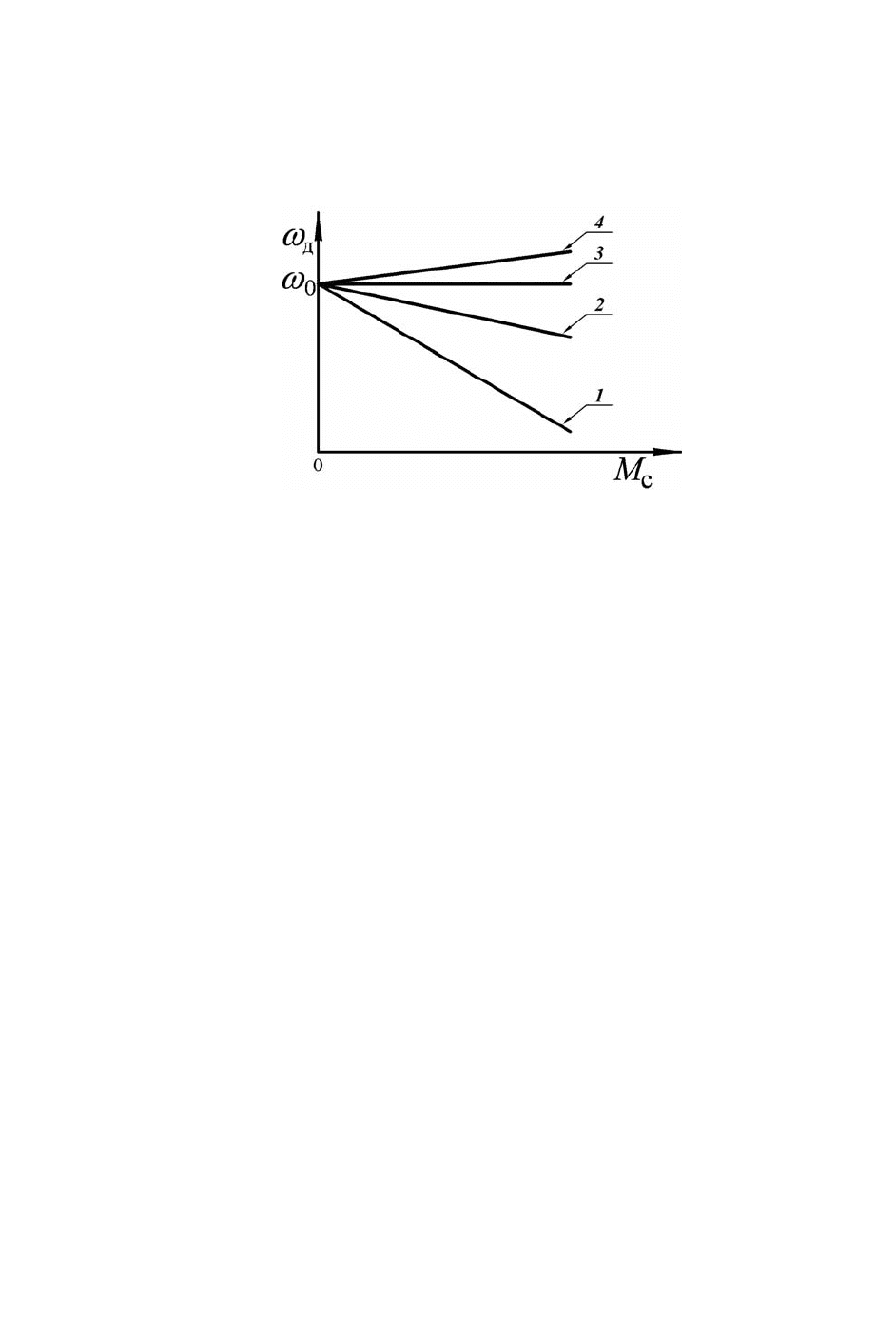
На рис. 1.12 показаны зависимости
д c
()
f
M
ω
=
при различных значе-
ниях коэффициента
м
k
.
Рис. 1.12
Зависимость 1 соответствует режиму
м
0k
=
. С увеличением
м
k
путем
перемещения движка потенциометра
f
R
падение скорости
д
ω
уменьшается
(зависимость 2). При соответствующих положениях движка можно добиться
полной компенсации влияния нагрузки (зависимость 3) или даже переком-
пенсации (зависимость 4).
Таким образом, степень компенсации влияния возмущающего воздей-
ствия
c
M
в системе зависит от степени адекватности характеристики объекта
д c
()
f
M
ω
=
и от точности измерения возмущающего воздействия.
***
Пример 2.
Система автоматической стабилизации угловой скорости двигателя
постоянного тока с независимым возбуждением, реализующая принцип
управления по отклонению.
Принципиальная схема системы приведена на рис. 1.13.
37
Рис. 1.13
Формирование сигнала рассогласования
()ut
Δ
, пропорционального
ошибке
зд
() ()tt
ω
ω
Δ= −
, осуществляется с помощью задающего потен-
циометра
з
R
и тахогенератора ТГ, которые включены так, что их выходные
напряжения
з
u
и
тг
u
направлены встречно, т.е.:
зтг
uu u=−
Δ
.
Усиленное по величине и мощности в усилителе постоянного тока и
тиристорном преобразователе ТП, выходное напряжение
тг
u
, приложенное
к цепи якоря двигателя, осуществляет соответствующее изменение скорости
вращения двигателя, уменьшая величину
()t
Δ
.
Полагая
()
з з з тг тг д тп упт з тг
,,()uk u k t u k uu
ω
ω
=⋅ = ⋅ = ⋅ −
,
получаем при
зтг
kk k==
следующее выражение дли сигнала управления на
входе ТП:
тп упт з д упт
()() ()tu t kk kk t
ω
ω
⎡⎤
⋅− = ⋅
⎣⎦
=
⋅⋅Δ
,
где
упт
k
- коэффициент передачи УПТ.
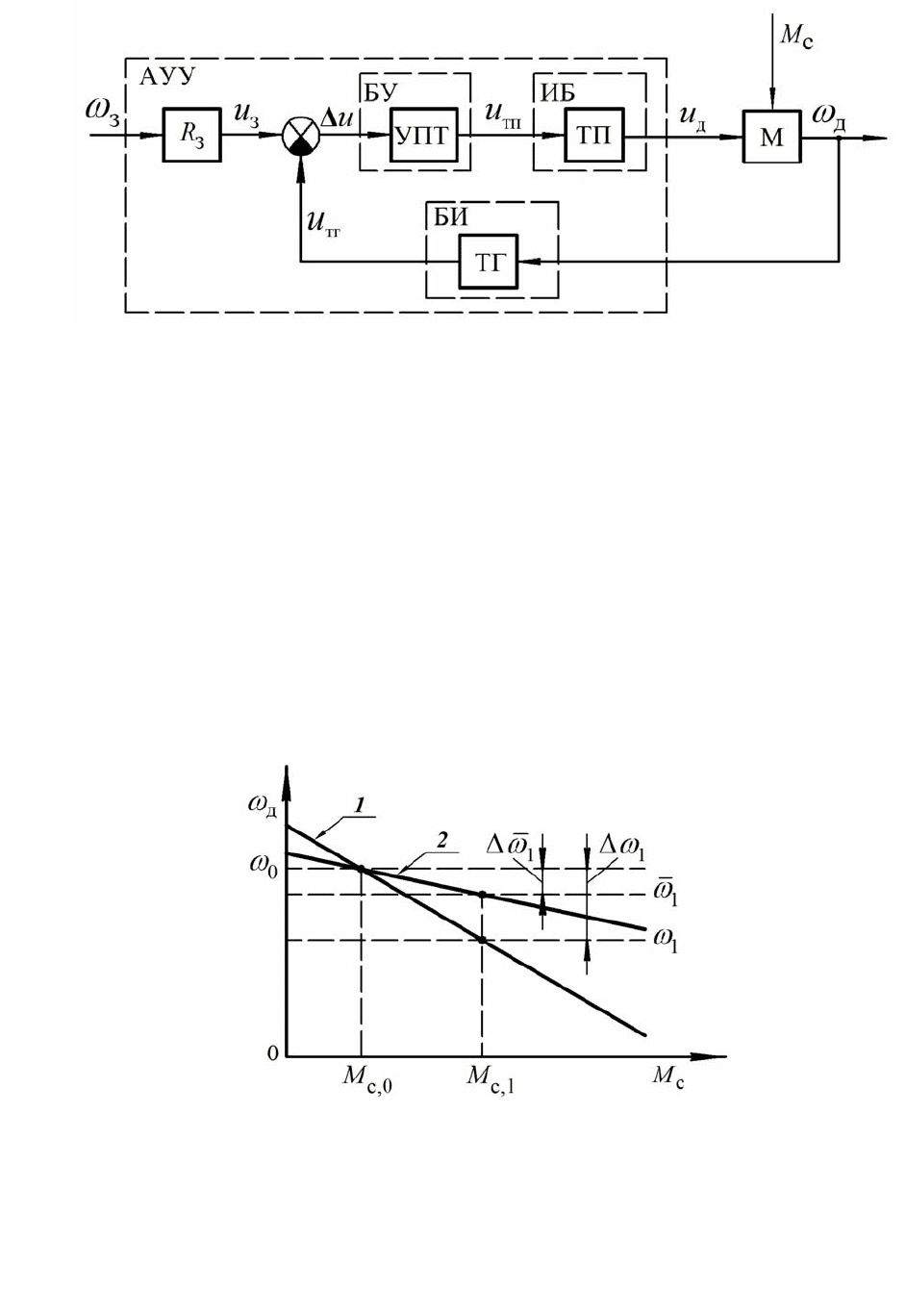
Функциональная схема системы приведена на рис. 1.14.
38
Рис. 1.14
Рассмотрим работу системы. Пусть
,0
cc
()
M
tM const==
и
з
uconst=
. Тогда имеем:
д
0
()t
ω
ω
=
,
д
д,0
()ut u
=
,
тг
тг,0
()ut u
=
,
з
тг,0 0
uu u uΔ= − =Δ
. При увеличении момента нагрузки, например, до
значения
cc
,1 ,0
M
M>
, скорость двигателя уменьшится на величину
1
ω
Δ
и станет равной
10 1
ω
ωω
=−Δ
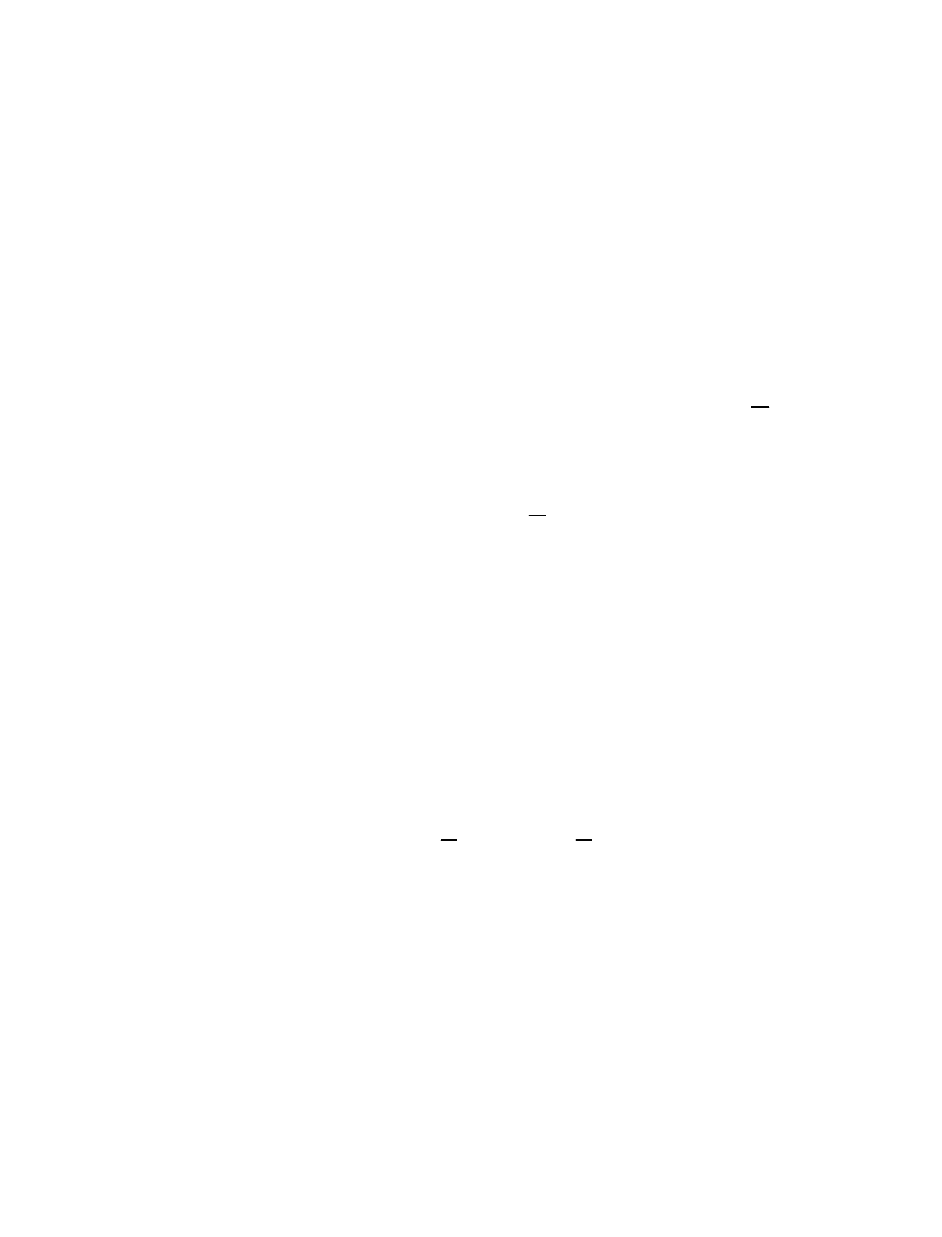
(см. рис. 1.15, кривая 1).
Рис. 1.15
Величина
1
ω
Δ
соответствует падению скорости двигателя при отсут-
ствии управления.
39
Воздействие обратной связи состоит в том, что со снижением скорости
уменьшается напряжение тахогенератора
тг
тг,0 тг,1
uu u
=
−Δ
. Соответст-
венно возрастает сигнал рассогласования
зтг з тг,0 тг,1 0 тг,1
()uu u u u u u uΔ= − = − −Δ =Δ +Δ
. Это приводит к воз-
растанию напряжения на якоре двигателя
д,1
u
и скорости вращения
д
ω
.
После окончания переходного процесса система переходит в новый устано-
вившийся режим, который характеризуется напряжением
д ,1 д ,0
uu>
и
соответствующей этому напряжению скоростью вращения
1
ω
. Однако но-
вое установившееся значение скорости будет меньше того значения, которое
было до начала процесса управления, т.е.
10
ω
ω
<
(см. рис. 1.15, кривая 2).
Действительно, при увеличении момента нагрузки снижается скорость вра-
щения, и для того чтобы ее увеличить, нужно увеличить напряжение
д
u
, что
может быть осуществлено только при уменьшении напряжения
тг
u
, а сле-
довательно, и скорости вращения двигателя.
Таким образом, рассмотренная система характеризуется наличием в ус-
тановившемся режиме ошибки
101
ω
ωω
Δ
=−
, величина которой, в зави-
симости от коэффициента усиления тахогенератора, может быть значительно
меньше ошибки
1
ω
Δ
при отсутствии обратной связи (
тг
0k =
).
***
Пример 3.
Следящая система управления углом поворота рабочего механизма.
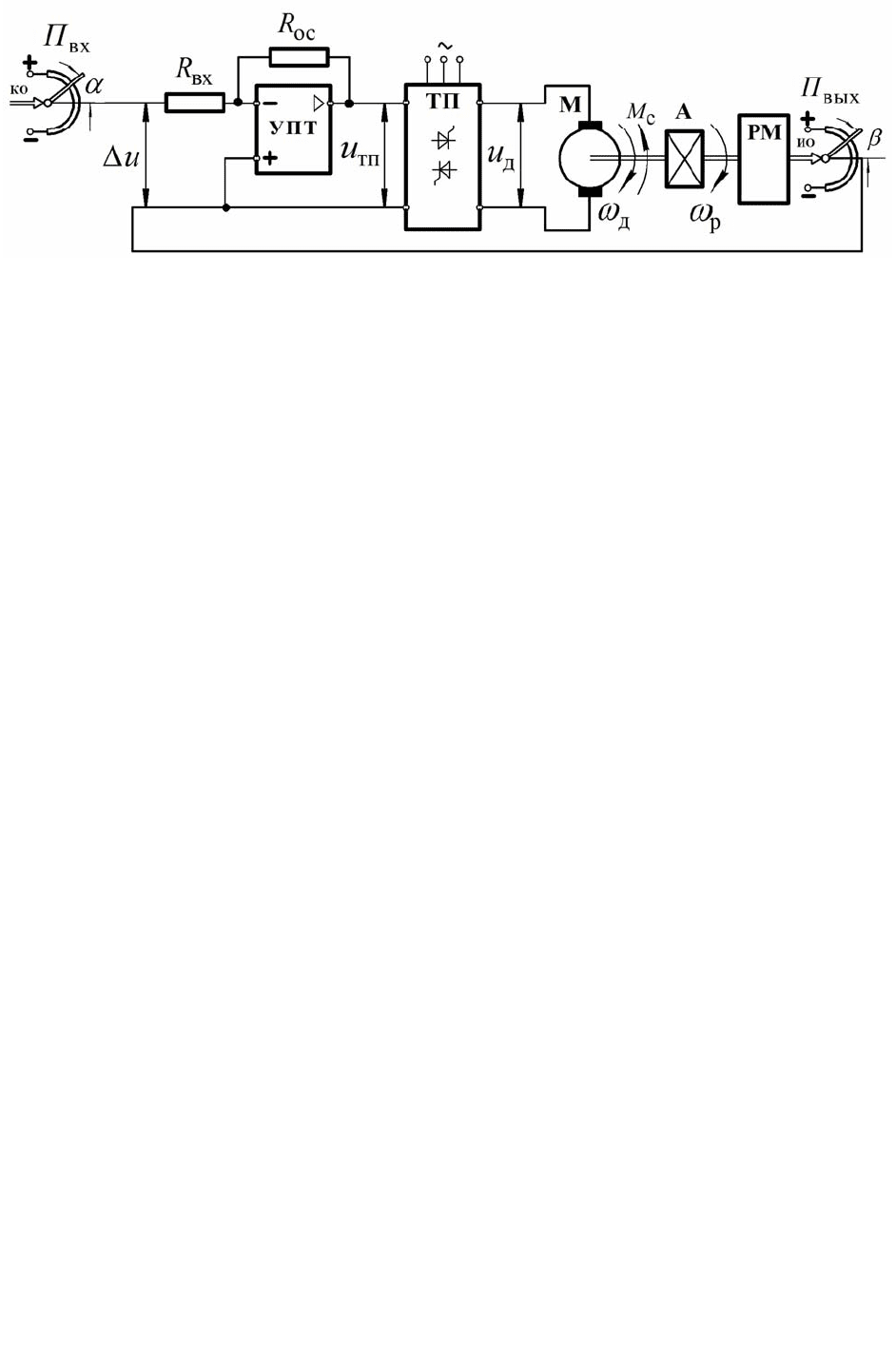
Принципиальная схема системы приведена на рис. 1.16.
40
Рис. 1.16
Объектом управления в данной системе является рабочий механизм
РМ. Управляемой величиной является угол поворота вала рабочего механиз-
ма
β
или, что то же самое, угол поворота движка потенциометра
вых
П
,
поскольку этот потенциометр расположен на одном валу с рабочим механиз-
мом (на исполнительной оси ИО), а задающим сигналом - угол поворота
α
движка потенциометра
вх
П
, который расположен на командной оси КО.
АУУ состоит из измерительных устройств
вх
П
и
вых
П
, усилителя
постоянного тока УПТ, реверсивного тиристорного преобразователя ТП,
двигателя постоянного тока с независимым возбуждением М и редуктора А.
Алгоритм функционирования САУ заключается в том, чтобы исполнитель-
ная ось ИО следила за произвольно изменяющимся положением оси КО, т.е.
() ()tt
β
α
=
при действии на элементы системы различных возмущений, в
частности момента статического сопротивления
c
M
.
Сигнал рассогласования
()ut
Δ
определяется соотношением:
[
]
пп
() () () () () ()ut u t u t k t t k t
α
β
αβ
Δ= − = − =Δ
,
где:
u
α
и
u
β
- соответственно, выходные напряжения потенциометров
вх
П
и
вых
П
;
п
k
- передаточный коэффициент измерительных устройств
(потенциометры
вх
П
и
вых
П
имеют одинаковые конструкции и парамет-