Живоглядов В.Г. Теория движения транспортных и пешеходных потоков
Подождите немного. Документ загружается.

(33)
j:=1÷4
x:=λτr
i
j1
k:=2÷kol
X< λτr
i
jk
x:= λτr
i
jk
да
нет
i:=3÷4
да
j<=2
нет
A[j+2]:=A[j+2]+x;
A[j-2]:=A[j-2]+x;
(18)
j:=1÷4
да
j<=2
нет
A[j]:=A[j]+(μ
пj
+ μ
лj+2
)*ν/(k
пj
+ k
лj+2
)
A[j]:=A[j]+(μ
пj
+ μ
лj-2
)*ν/(k
пj
+ k
лj-2
)
да
A[1]>A[3]
нет
q:=A[1]
q:=A[3];
да
A[2]>A[4]
нет
r:=A[2]
r:=A[4];
(17)
(18)
(19)
421
(20)
Sluch=2:
j:=1÷4
A[j]:=max2(λτ,j,n)
j:=1÷4
x:=max3(λτr, i, j, kol)
i
:=
3
÷
4
да
j<=2
нет
A[j+2]:=A[j+2]+x;
A[j-2]:=A[j-2]+x;
j:=1÷4
i:=1÷4
да
j<>1
нет
A[j]:=A[j]+max3(λτr,i,j-1, kol) A[1]:=A[1]+max3(λτr,i,4,kol)
i<>2
да
нет
j:=1÷4
да
j<>4
нет
A[j]:= A[j]+max3(λτr,4,j+1, kol)
A[4]:= A[4]+max3(λτr,4,1,kol)
да
j<=2
нет
A[j]:=A[j]+(μ
пj
+ μ
лj+2
)*ν/(k
пj
+ k
лj+2
)
A[j]:=A[j]+(μ
пj
+ μ
лj-2
)*ν/(k
пj
+ k
лj-2
)
(21)
(22)
(23)
(24)
(25)
422
Sluch=3:
(28)
α:=q/(q+r); β:=r/(q+r);
q+r<>1
да нет
C:=(2*tr+T
0
)/(1-q-r)
ошибка
конец
t
зел
:=α*(С-T
0
);
t
кр
:=β*(С-T
0
);
(36)
(37)
да
A[1]>A[3]
нет
q:=A[1]
q:=A[3];
да
A[2]>A[4]
нет
r:=A[2]
r:=A[4];
(26)
(27)
k:=1÷n
q:=q+ λτ
1k
q:=0; r:=0
q:=q+(μ
п1
+ μ
л3
)*ν/(k
п1
+ k
л3
)
k
:=1÷
k
ol
j:=2÷4
r:=r+ λτr
jk
r:=r+(μ
п2
+ μ
л4
)*ν/(k
п2
+ k
л4
)
(29)
(30)
(32)
(33)
(31)
(34)
(35)
423
j:=1÷4
k:=1÷n
n
0цh
:=n
0цh
+ n
0jk
да
j mod 2
<>0
нет
n
0jk
:=(tr+T
0
+β*(С-T
0
))/(1-q)*λ
jk
n
0jk
:=(tr+T
0
+β*(С-T
0
))/(1-r)*λ
jk
n
0h
:= n
0ц
h
*3600/С
(40)
Z
1TE
:=(tr+T
0
+β*(С-T
0
))/2;
Z
ц
:=0;
(41)
(42)
Z
цh
:=Z
ц
/3600;
Z
h
:=Z
ц
/C;
(43)
j
:=1÷4
k
:=
1÷
n
m:=0
i
:=1÷4
m:=m+ λ
i
jk
λ
jk
:=m;
(38)
(39)
j:=1÷4
n
j
:= n
j
+n
0jk
k
:=1÷n
Z
j
:= n
j
* Z
j1TE
; Zц:=Zц+ Z
j
424
j:=1÷4
k
:=1÷n
да
j mod 2 <>0
нет
t
0jk
:=((2*tr+T
0
+β*(С-T
0
))*q)/(1-q) t
0jk
:=((2*tr+T
0
+β*(С-T
0
))*r)/(1-r)
(46)
(47)
j:=1÷4
k:=1÷n
t
xjk
:=t
зел
- t
0jk
k:=1÷n
Z
jk
:= Z
jk
+ n
0jk
m:=1÷round(n
0jk
)
Z
jkЖив
:= (2*Z
jkЖив
-2* n
0jk
*round(n
0jk
))/(2*λ
jk
)
Z
jЖив
:= Z
jЖив
+ Z
jkЖив
Z
1TEjЖив
:= Z
jЖив
/n
0j
; Z
цЖив
:= Z
цЖив
+ Z
jЖив
j:=1÷4
Z
цhЖив
:=3600Z
цЖив
/С;
Z
h
Жив
:=Z
цЖив
/С;
(44)
(45)
j
:=1÷4
k:=1÷n
τ
jk
<>0
да нет
n
xjk
:=t
xjk
/τ
jk
ошибка
конец
(48)
425
4.10.2. Комментарий к блок–схеме алгоритма расчета основных
параметров работы РКД
Данный алгоритм позволяет по исходным данным n – количество рядов
на примыканиях, kol – количество рядов на самой РКД, λ
i
jk
, τ
i
jk
, T
i
jk
- характе-
ристики примыканий, λ
i
rjk
, τ
i
rjk
, T
i
rjk
- характеристики РКД, tr – время реакции
водителя, ν, μ
пj
, μ
лj
, k
пj
, k
лj
, S
j
– характеристики ПП, рассчитать основные па-
раметры, описывающие и определяющие оптимальную работу РКД.
Количество рядов n и kol вводятся в первую очередь, так как исходя
из него, определяются размеры таблиц и массивов для переменных λ
i
jk
, Т
i
lj
, τ
i
jk
и λ
i
rjk
, τ
i
rjk
, T
i
rjk
.
Исходные данные, описывающие движение ТС (λ
i
jk
, Т
i
lj
, τ
i
jk
, λ
i
rjk
, τ
i
rjk
,
T
i
rjk
), определяются для j – го направления, k - го ряда, i – маневра, поэтому
для работы с ними удобно использовать трехмерные массивы lm3[i,j,k],
tau3[i,j,k], Т3[i,j,k] и lmr3[i,j,kol], taur3[i,j,kol], Тr3[i,j,kol] размер которых за-
висит от количества рядов: lm3[1..4, 1..4, 1..n], tau3[1..4, 1..4, 1..n], T3[1..4,
1..4, 1..n], где n – количество рядов на примыканиях и lmr3[1..4, 1..4, 1..kol],
taur3[1..4, 1..4, 1..kol], Tr3[1..4, 1..4, 1..kol], где kol – количество рядов на РКД.
Исходные данные, описывающие движение ПП (μ
пj
, μ
лj
, k
пj
, k
лj
,S
j
) оп-
ределяются только для j - направления, поэтому для работы с ними будем
использовать одномерные массивы mup[j], mul[j], kp[j], kl[j], S[j]. Данные бу-
дем считывать из одномерных массивов. Параметры пропускной способно-
сти РКД (n
0jk
, n
xjk
, t
xjk
, t
0jk
, К
tзелjk
, λ
0jk
) определяются для j –го направлениям, k –
го ряда, для работы с ними используем двумерные массивы n0[j,k], tc0[j,k],
tx[j,k], nx[j,k], Ktzel[j,k], lm_max[j,k].
В блок схеме алгоритма используется вспомогательная подпрограммы.
Функция MAX2:
конец
(51)
j:=1÷4
k:=1÷n
K
tзелjk
:= t
0jk
/ t
зел
(49)
(50)
426
Определяет в строке j двумерной таблицы у(j,k) максимальное значение
среди k элементов: (1) - Начало подпрограммы; (2) - Ввод исходных данных:
у – двумерный массив, j – номер строки в нем, n – длина этой строки;
(3) - Максимальным элементом объявляется х=у(j,1); (4) Среди оставшихся
n-1 элементов ведется поиск элемента меньше х, в случае удачного поиска,
значение х заменяется на новое. (5) Выводиться элемент х, максимальный в
строке j. (6) - Конец подпрограммы.
Функция MAX3:
Определяет в строке i j трехмерной таблицы у(i,j,k) максимальное зна-
чение среди k элементов. (1) Начало подпрограммы; (2) Ввод исходных дан-
ных: у – трехмерный массив, i j – номер строки в нем, n – длина этой строки;
(3) Максимальным элементом объявляется х=у(i,j,1); (4) Среди оставшихся
n-1 элементов ведется поиск элемента меньше х, в случае удачного поиска,
значение х заменяется на новое. (5) Выводиться элемент х, максимальный в
строке j. (6) Конец подпрограммы.
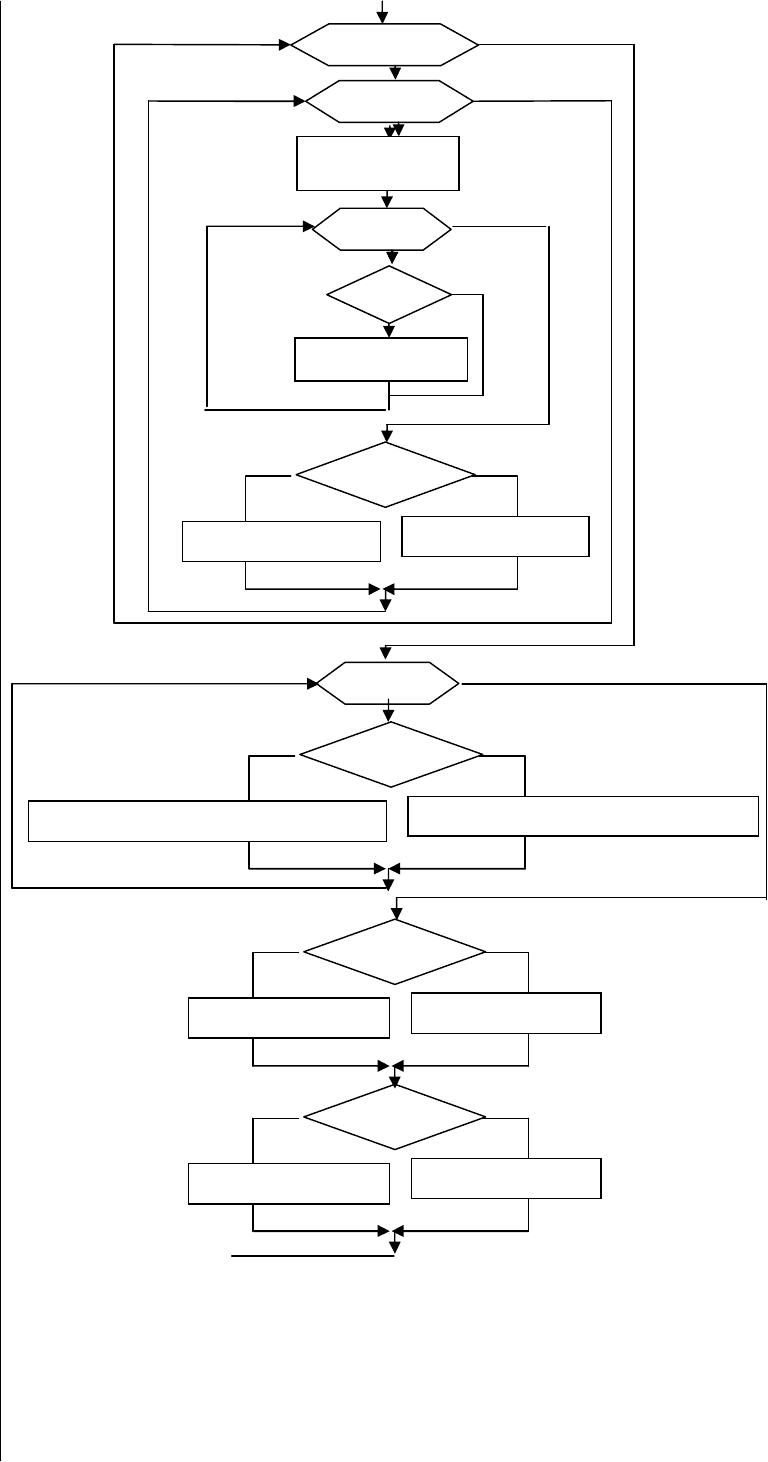
Основной алгоритм:
В данном алгоритме рассматривается три случая светофорного управ-
ления дорожным движением на РКД.
1) Когда применяется локальное СУ дорожным движением, которое
независимо от других примыкаемых лучей к РКД, поскольку оно не учиты-
вает их воздействия на свою динамику пропуска потоков: когда на РКД со
всеми примыканиями (лучами) пропуск ТПП осуществляется по одному об-
щему двух или трехфазному циклу СР.
2) В этом случае пропуск потоков осуществляется попарно – четные, а
потом – нечетные направления или наоборот.
3) Когда координируется включение разрешающего такта цикла СР от
примыкания к примыканию по мере преодоления расстояний между свето-
форными объектами на РКД. Сдвиг разрешающих фаз осуществляется на пе-
риод равный времени преодоления расстояния между светофорными объек-
тами против часовой стрелки.
Опишем строение основного алгоритма по блокам: (1) начало про-
граммы; (2) ввод исходных данных ν, n, t
r
; (3) исходя из количества рядов n
ввод трехмерных массивов λ
i
jk
, τ
i
jk
, T
i
jk
и λ
i
rjk
, τ
i
rjk
, T
i
rjk
; (4) обнуляются пере-
427
менные t0l
jk
:=0 и rl
jk
:=0; (5) подсчитываются значения h
i
jk
:=1-e
-λijkТjk
и
t0l
jk
:=t0l
jk
+h
i
jk
*T
i
jk
и rl
jk
:=rl
jk
+h
i
jk
; (6) если rl
jk
<>0, подсчитываются значения
t0l
jk
:=t0l
jk
/rl
jk
и определяется максимальная величина t0l
jk
в j – направлении
среди k – рядов. (7) среди величин с1 и с3 определяется максимальное и при-
сваивается величине Т
0
1
, среди величин с2 и с4 определяется максимальное и
присваивается величине Т
0
2
,. (8) определяется длительность желтого сигнала
T
0
:=T
0
1
+T
0
2
; (9) формирование двумерного массива; (10) ввод характеристик
пешеходного движения μ
пj
, μ
лj
, k
пj
, k
лj
,S
j
; (11) формирование трехмерного мас-
сива λτ
i
rjk
; (12) формирование двумерного массива λτ
rjk
; (13) узловая точка
выбора: в зависимости от случая светофорного управления на РКД выбира-
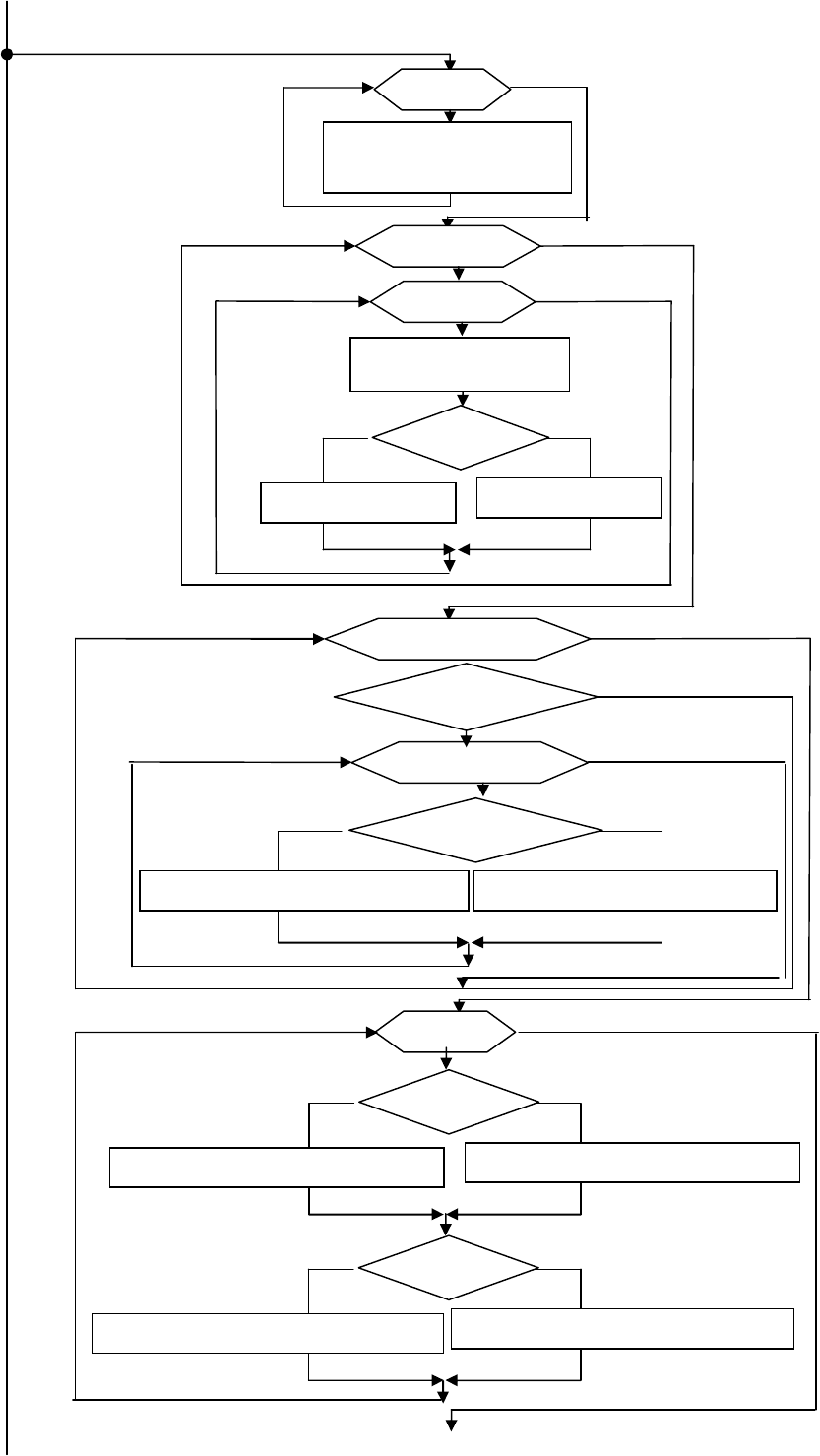
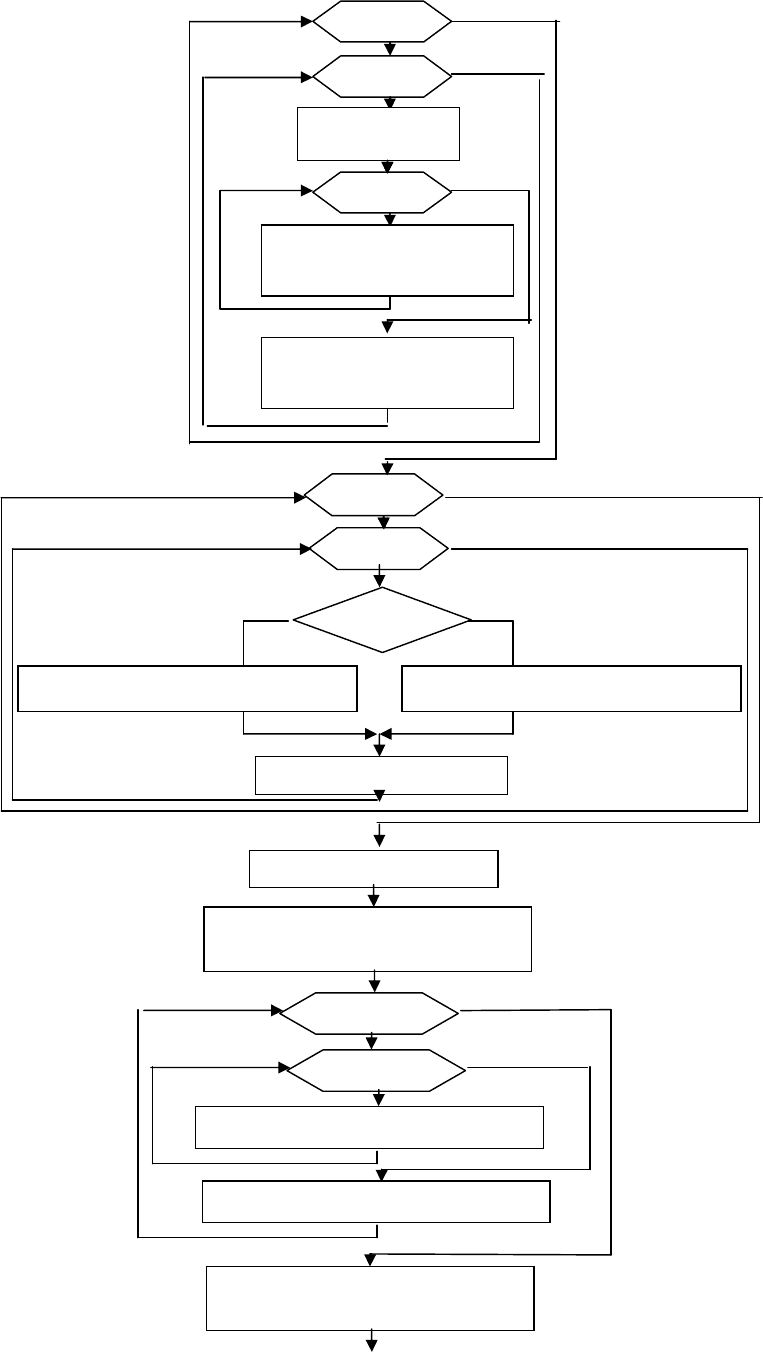
ется один из следующих подпунктов; (14) в этом блоке подсчитывается зна-
чение q и r для первого случая по формулам главы 4; (15) в переменных А1 -
А4 сохраняется максимальная величина λτ
jk
на j – направлении среди всех n –
рядов примыканий; (16) далее к переменным А1 - А4 прибавляются макси-
мальные среди всех kol рядов РКД величины λτ
rjk
маневров i = 3, 4 со встреч-
ных направлений j+2; (17) далее к переменным А1 - А4 прибавляются дина-
мические характеристики ПП; (18) из переменных А1 и А3 определяется
максимальная величина, и ее значение присваивается переменной q; (19) из
переменных А2 и А4 так же определяется максимальная величина, и ее зна-
чение присваивается переменной r, по выполнению этого блока программа
переходит к пункту 34, минуя все стоящие между ним; (20) в этом блоке
подсчитывается значение q и r для второго случая по формулам главы 4;
(21) в переменных А1 - А4 сохраняется максимальная величина λτ
jk
на j – на-
правлении среди всех n – рядов примыканий; (22) далее к переменным А1 -
А4 прибавляются максимальные среди всех kol рядов РКД величины λτ
rjk
ма-
невров i = 3, 4 со встречных направлений j+2; (23) далее к переменным А1 -
А4 прибавляются максимальные среди всех kol рядов РКД величины λτ
rjk
ма-
невров i = 1, 3, 4 с направлений j - 1; (24) далее к переменным А1 - А4 при-
бавляются максимальные среди всех kol рядов РКД величины λτ
rjk
маневра i =
4 с направлений j + 1; (25) далее к переменным А1 - А4 прибавляются дина-
мические характеристики пешеходных потоков; (26) из переменных А1 и А3
определяется максимальная величина, и ее значение присваивается перемен-
ной q; (27) из переменных А2 и А4 так же определяется максимальная вели-
428
чина, и ее значение присваивается переменной r, по выполнению этого блока
программа переходит к пункту 34, минуя все стоящие между ним; (28) в
этом блоке подсчитывается значение q и r для третьего случая по формулам
главы 4; (29) обнуляются значения переменных q и r; (30) в переменной q
суммируются величины λτ
1k
всех рядов первого направления; (31) к пере-
менной q прибавляется динамическая характеристика пешеходного потока
первого направления; (32) в переменной r суммируется величин λτ
rjk
всех ря-
дов второго направления маневра i=3, третьего направления маневра i=1 и
четвертого направления маневра i=2, первого направления маневра i=4;
(33) к переменной r прибавляется динамическая характеристика пешеходно-
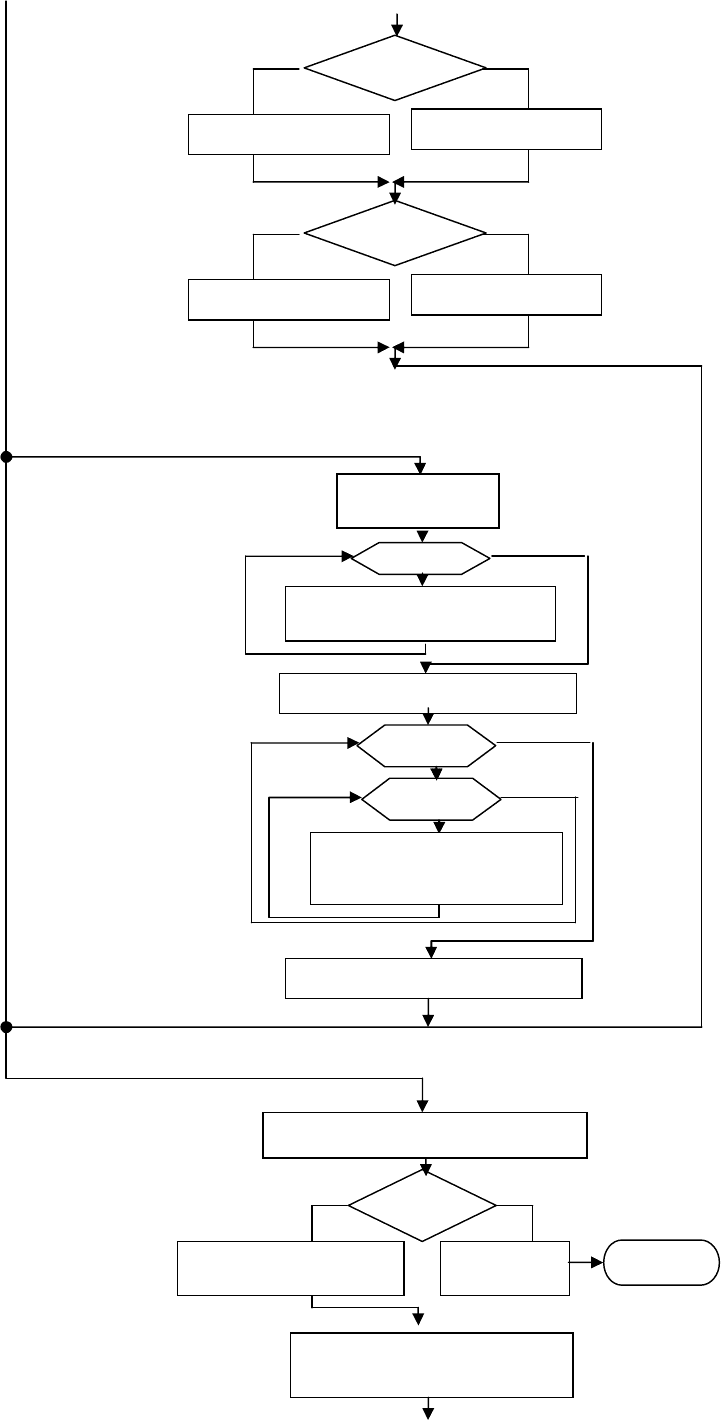
го потока второго направления; по выполнению этого блока программа пере-
ходит к пункту (34) выход из оператора выбора, переход к выполнению ос-
тавшейся части программы; (35) подсчет значений α и β; (36) если q + r <>0,
рассчитывается длительность С(оптимальная) для двухфазного цикла свето-
фора; (37) расчет t
зел
, и t
кр
для двухфазного цикла светофора; (38) формиру-
ется двумерный массив λ
jk
; (39) подсчет размера полной очереди n
0jk
и
n
0цh
;
(40) подсчет полной очереди на РКД за час работы светофорного объекта;
(41) подсчет задержки одной транспортной единицы по формуле Полякова;
(42) подсчет размера полной очереди на j - направлении n
j
;Подсчет Z
j
, Z
ц
,
исходя из Z
1TE
, рассчитанной по формуле Полякова; (43) подсчет Z
цh
, исходя
из Z
1TE
, рассчитанной по формуле Полякова; (44) расчет Z
jkЖив
, Z
1TEjЖив
по
формулам автора монографии (функция round(x) округляет вещественное
число); (45) подсчет Z
цЖив
, Z
цhЖив
, исходя из Z
jkЖив
, Z
jЖив
, рассчитанных по
формуле автора монографии; (46) расчет t
0jk
; (47) расчет t
xjk
; (48) расчет n
xjk
,
в случае, если τ
jk
=0, происходит аварийный выход из программы; (49) иссле-
дование оптимальности цикла – проверка соотношения K
tзелjk
=t
0jk
/ t
зел
, если
берется нечетное направление t
зел
= t
кр
если четное; (50) Конец программы.
4.10.3. Расчет основных характеритсик работы разввязки с
круговым движением
Далее рассчитаны основные характеристики СР и ТП для РКД, содержа-
щей четыре примыкания, каждое из которых имеет однорядное двустороннее
движение. Сама РКД содержит три ряда: первый – для проезда направо, вто-
рой – проезд прямо, третий – для маневров левого поворота и разворота.
429
Для изучения зависимости основных характеристик РКД от интенсив-
ности прибытия ТС к стоп - линиям ее примыканий работа развязки рас-
смотрена с шагом 0,015 при интенсивности от 0,1 до 0,22 ТЕ/с на j – ом на-
правлении одного примыкания.
Для каждого j – го направления примыканий установлено следующее
деление интенсивности по маневрам: λ
1
j
=1/3 λ
j
, λ
2
j
=1/3 λ
j
, λ
3
j
=1/6 λ
j
, λ
4
j
=1/6 λ
j
.
В расчетах принято τ
j
=2 с, t
r
= 0,5 с. Данные о характеристиках работы
развязки с круговым движением представлены в табл. 4.1. На основе данных
табл. 4.1 построены графики зависимости динамических, характеристик
светофорного регулирования и транспортных потоков в зависимости от
интенсивности движения (рис. 4.12 – 4.22).
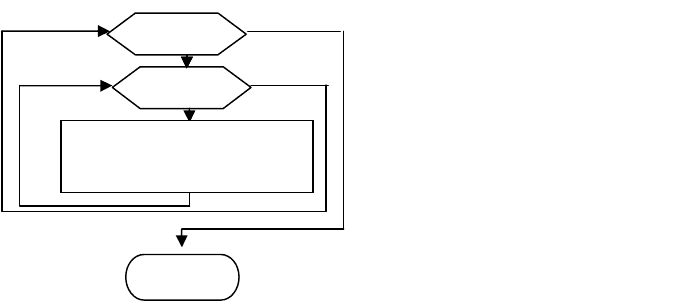
6,02
6,04
6,06
6,08
6,1
6,12
6,14
6,16
6,18
6,2
0,1 0,115 0,13 0,145 0,16 0,175 0,19 0,205 0,22
Длительность
промежуточного такта, с
Интенсивность прибытия на примыканиях, ТЕ/с
Рис. 4.12. Зависимость длительности промежуточного такта Т
0
на РКД от интенсивности
прибытия транспортных средств к стоп – линиям примыканий
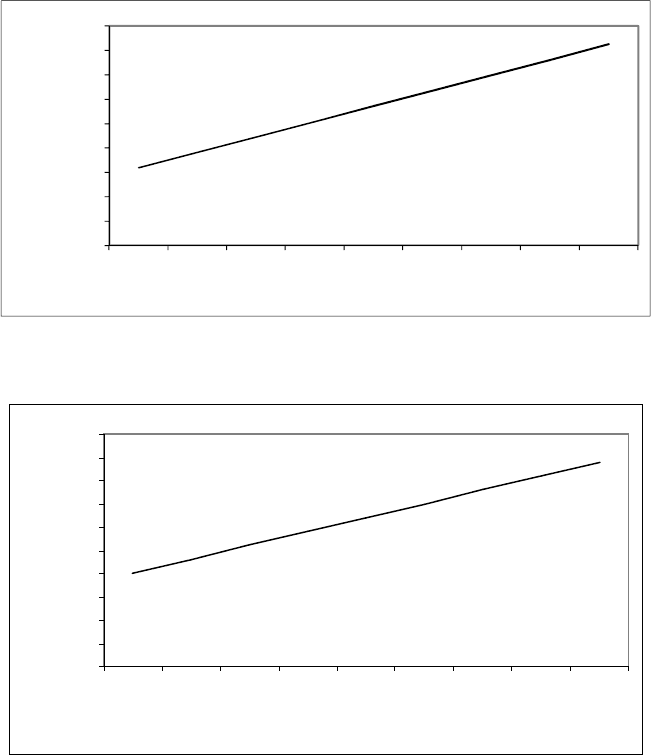
0
0,05
0,1
0,15
0,2
0,25
0,3
0,35
0,4
0,45
0,5
0,1 0,115 0,13 0,145 0,16 0,175 0,19 0,205 0,22
Интенсивность прибытия на примыканиях, ТЕ/с
q=r
Рис. 4.13. Зависимость динамических характеристик q и r на РКД от интенсивности
прибытия транспортных средств к стоп – линиям примыканий
430