Yangsheng Xu, Yongsheng Ou. Control of Single Wheel Robots
Подождите немного. Документ загружается.

21
In
tro
duction
polygonofsupportrequired forstatic stabilityprovides aleveragemecha-
nismfor thegenerationofdynamic torquedisturbances. Further, thesupport
points must comply with the surface, statically as well as dynamically,bycon-
trol
of
suppo
rt
po
in
ts
(e.g
.s
usp
ension)
an
d/or
by
v
eh
iclea
ttitudec
ha
nges.
Sophisticated
ve
hicle
sus
pe
nsionsh
av
eb
een
dev
elo
pe
dt
om
inimize
dy
namic
disturbances,
but
passiv
e-sp
ring
sus
pe
nsionsd
ecrease
static
stabilit
yb
ya
l-
lowing the center of masstomovetoward theoutside of thesupportpolygon.
Activesuspensions mayovercome thisproblem, but require additionalcom-
plexity andenergyexpenditure.
As asecond example, consider abicycle or motorcycle whichhas two
wheels in the fore-aft (tandem) configuration. Such avehicleisstatically un-
stable in the roll direction, butachieves dynamic stabilityatmoderate speed
through appropriate steering geometry andgyroscopic action of the steered
fron
tw
heel.
Ste
ering
st
abilit
yg
enerally
increases
with
sp
eed
duet
og
yroscopic
effects. Dynamic forces at the wheel-groundcontactpointact on or near the
vehicle center (sagital) plane, and thus produceminimal roll disturbances.
Additionally,the bicycle can remain uprightwhen traveling on side slopes.
Thus, sacrificing
static roll stabilitye
nhancesthe
dynamic roll stabilitya
nd
permits thevehicletoautomaticallyadjust to side slopes.
As alogical extension of this argument,consider awheelrollingdownan
incline. Under the
influence of
gravity,
gyroscopic action causest
he wheel to
precess(the axis of wheel rotationturns)about thevertical axis–rather than
simply falling sidewaysasitdoeswhen notrolling–andthe wheel steers in the
directioni
ti
sl
eaning. The
resulting curve
dp
ath of
motion of
thewheelonthe
ground producesradial ( centrifugal)forcesatthe wheel-groundcontactpoint,
tending to rightthe wheel.Dynamic disturbances duetosurface irregularities
act throughornear the wheel’s center of mass, producing minimal torques
in roll,pitchand yaw. The angular momentum of the wheel, in additionto
providing thenaturalg
yroscopic steeringm
echanism, tendstostabilize the
wheel with respect to roll andyaw.Interms of attitude control, the wheel is
relative
ly insensitivet
of
ore/afta
nd side slopes.T
he resultisah
ighly stable
rolling motion wi
th minimal
attitude disturbances and tolerance to fore/aft
and verticaldisturbances. Onecan readilyobservethis behavior by rolling an
automobile tire down abumpyhillside.
Thereare precedentsfor single-wheel-likevehicles. In 1869,R.C. Hem-
mings [43] patented a Velocipede ,alarge wheel encircling the rider, powered
by hand cranks.Palmer [82]describes several single-wheel vehicleswith an
operatorridinginside. A1935 publication [72] describes the Gyroauto,which
carried the riders between apair of large, side-by-side wheels, andwas claimed
capable of aspeed of 116mph (187kph). Also in [72], thereisadescription
of the Dyno-Wheel, aconcept having abus-like chassis straddling ahugecen-
tral wheel. The relatively large diameterofasingle-wheel vehicle enhances
its obstacle-crossing ability, smoothnessofmotion androllingefficiency [12].
Further, asingle-trackvehicle can more easily findobstacle-freepathson
the ground, andits narrow profilecan improve maneuverability. However,
1.1 Background 3
problems with steering, low-speed stability and aerodynamics, have kept such
vehicles from becoming commonplace.
1.1.2 Problems of Stable Robots
Traditional Research on mobile robotics has placed heavy emphasis on per-
ception, modeling of the environment and path planning. Consequently, ve-
hicles have been designed to be compatible with these planning limitations,
and the need for high speed has not been evident. Ultimately, as sensing and
computation capabilities improve, robots will be limited less by planning and
more by dynamic factors. Wheeled robots, capable of dynamic behavior - i.e.
high-speed motion on rough terrain - and of exploiting vehicle dynamics for
mobility, represent an exciting and largely unexplored area.
The purpose of our research is to exploit the natural steering behavior and
stability of the rolling wheel in the development of a highly dynamic, single
wheel mobile robot. We have built several prototypes of such a vehicle, and
demonstrated some of the potential capabilities.
1.1.3 Dynamically Stable Mobile Robots
Researchers have viewed mobile robots largely as quasi-static devices for
decades. Numerous robots with four, six or more wheels have been devel-
oped to maximize mobility on rough terrain. (See, for example, [13] [30] [45]
[52] [55].) Likewise, legged robots, which may have potentially greater mobil-
ity, have been built and demonstrated, as described in [60], [110]. Generally
these robots have featured low center-of-mass placement and broad base sup-
port, along with control and planning schemes designed to keep the center-
of-mass gravity vector within the support polygon (e.g. monitoring of slopes,
coordination of legs). Many designs have attempted to maximize mobility
with large wheels or legs, traction-enhancing tires or feet, multi-wheel driv-
ing, large body/ground clearance, articulated body configurations, etc. These
robots were often limited by motion-planning constraints and hence designed
for low-speed operation, typically 1 kph or less. Dynamic factors have little
influence on such systems, and consequently, have been largely ignored.
Traditional research on mobile robotics has placed heavy emphasis on per-
ception, modeling of the environment and path planning. Consequently, ve-
hicles have been designed to be compatible with these planning limitations,
and the need for high speed has not been evident. Ultimately, as sensing and
computation capabilities improve, robots will be limited less by planning and
more by dynamic factors. Wheeled robots, capable of dynamic behavior, i.e.
high-speed motion on rough terrain, and of exploiting vehicle dynamics for
mobility, represent an exciting and largely unexplored area.
A number of researchers have explored the possibilities of utilizing dynamic
behavior in various robot linkages, legged locomotors and other dynamic sys-
tems. Examples include Fukuda’s Brachiator [88] and Spong’s robot acrobat
41
In
tro
duction
[100], both of whichutilized dynamic swinging motions. Koditschek [22] and
Atkeson [92] andtheirstudents studied the dynamics of juggling.McGeer built
arobot that walked down slopes without additionalpowerorcontrol input,
utilizing
th
ep
er
io
di
cs
winging
motiono
ft
he
legs
[70
].
Raib
ert’s
gr
oupb
ui
lt
a
series
of
dynamically
balanced,
ho
pping
andr
unning
robo
ts
that
jump
ed
ob-
stacles, climbedsteps [44], andperformedflips. Arai [3] andXu’s group[14]
developed an underactuatedrobot system by using thedynamic coupling be-
tween the passiveand activejoints.Dynamic motion in these systems allowed
the emergence of behaviorsthatwould nothavebeen possible quasi-statically.
In parallel with the work on linkage dynamics,other researchers have fo-
cused on thedynamics and balance of wheeled robots. Vos[109] developed
aself-contained unicycle that mimickedthe behavior of ahumancyclist in
maintainingroll andpitchstability. Koshiyama andYamafuji [59] developed
astatically stable, single-wheel robot with an internal mechanismthatcould
could move fore andaft andturn in place;theirworkemphasized the control
of the(non-inverted)pendulumcarriedonthe wheel, utilizing momentum
transfer in changingdirection.
The in
vention of the wheel
predates recorded history,but man
yi
nt
eresting
wheeled vehicleshaveappeared within thepass fewcenturies. According to
the historian [79], the
bicycle originated in
the
late 1700sasanunsteerable
vehicle known as the”HobbyHorse”. In theearly 1800s, steeringwas added
to the front wheel to facilitate changingvehicle direction; serendipitously,the
front-steeringc
onfiguration pro
ve
dt
ob
es
elf-stabilizing. Prior to
this
develop-
ment, the thoughtofavehicle travelingstably on two wheels would have been
considered ludicrous. In [82], Palmer describes several,
single-wheel ve
hicles.
One, an 8-foot diameter, cage-likew
heelw
as
drive
nt
hroughfoottreadlesand
hand cranks by the driverinside. Presumably it wasstabilized by gyroscopic
action, andsteered by
shifting the drive
r’s weight. A”
unicycle”, builtaround
1904, provided aseat forthe driver insidealarge, annular wheel, powered by
agasolineengine.
The stabilizinge
ffect of gyroscopeshas in
trigued inve
nt
orsf
or centuries,
andiscentral to anumberofinventions andpatents. Twointerestingvehicles
appearedina1935 publication [47].The ”Gyroauto” carried the driverand
apassenger between apair of large, side-by-side wheels, andwas claimed to
be capable of attaining aspeed of 116mph. The ”Dyno-Wheel” comprised a
bus-like
chassis straddling ah
ugecentral wheel. Outriggerw
heels apparent
ly
were usedtocontrol steering, acceleration andbraking.(It is doubtful that
theDyno-Wheel waseverbuilt.)Ina1968 patent [102], Summers proposed
gyroscopicallystabilizing the roll axis of vehicles, enablinganarrowtrack for
passing throughtightspaces(e.g. forloggingequipmentinforests). Several
inventions relate to placing stabilizinggyros on the front [42]orrear [79] wheel
of abicycle. A1933 patent [111] proposed agyro stabilizer to reduce shimmy
on thefront wheels of automobiles.
More recently, Koshiyama,etaland K. Yamafuji, et al [59]developeda
single-wheel robot with internal mechanism. The statically stable, spherical
1.2
De
sign
5
wheel can apparently turn in place throughinertialeffects of theinternal
mechanism, giving it good maneuverability. Muchofthe effortisdirected at
thecontrol aspects forturning andgenerating forward motion. D.Vos andA.
Floto
w[
109]
at
MI
Td
ev
elo
pe
da
na
utonomous
c
on
trol
sc
hemef
or
au
nicycle
that
is
comp
osed
of
aw
heel,
af
rame,a
nd
tu
rn
table
(inertia
wheel).
Tw
oD
C
motors
driv
et
he
unicycle
wh
eelf
or
fo
rw
ar
d/rev
ersem
otion,a
nd
the
tu
rn
table
forgenerationofyaw torques. The size andmass of theinertialdrivemecha-
nismislarge-2to3times that of thewheelitself-limitingmaneuverabilityand
the abilitytorecoverfromfalls. ProfessorYuta’s group[122] at University of
Tsukuba designed aunicycle that hasanupper andlowerpartfor steering,
anddeveloped algorithms on navigation andcontrol.
Pertinenttothe issue of attitudedisturbances on wheeled vehiclesisthe
work of Lindemannand Eisen at JetPropulsionLaboratory[67]. They simu-
lated the dynamic behavior of conventionalterrestrial construction equipment,
andpointedout thevulnerabilityofmulti-wheeled vehiclestodynamic dis-
turbances. The related researchworkonmulti-wheeled robots canbefounded
extensively in
papers published recently,
fore
xample, in
[91] and[117].
1.2 Design
1.2.1 Concept and Compromise
Gyrover is a novel, single wheel gyroscopically stabilized robot, originally
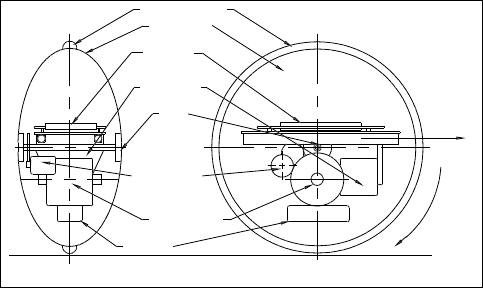
developed at Carnegie Mellon University [21]. Figure 1 shows a schematic of
the mechanism design. Essentially, Gyrover is a sharp-edged wheel, with an
actuation mechanism fitted inside the wheel. The actuation mechanism con-
sists of three separate actuators: (1)a spin motor, which spins a suspended
flywheel at a high rate, imparting dynamic stability to the robot; (2)a title
motor, which controls the steering of Gyrover; and (3)a drive motor, which
causes forward and/or backward acceleration, by driving the single wheel di-
rectly.
The behavior of Gyrover is based on the principle of gyroscopic precession
as exhibited in the stability of a rolling wheel. Because of its angular momen-
tum, a spinning wheel tends to precess at right angles to an applied torque,
according to the fundamental equation of gyroscopic precession:
T = J × ω × Ω (1.1)
where ω is the angular speed of the wheel, Ω is the wheel’s precession rate,
normal to the spin axis, J is the wheel polar moment of inertia about the
spin axis, and T is the applied torque, normal to the spin and precession
axes. Therefore, when a rolling wheel leans to one side, rather than just fall
over, the gravitationally induced torque causes the wheel to precess so that
it turns in the direction that it is leaning. Gyrover supplements this basic
concept with the addition of an internal gyroscope — the spinning flywheel
61
In
tro
duction
Tilt Motor
Rear View
Side View
Forward
Axle
Tile Surface
Wheel
Structure
Main CPU
Board
and Gearing
Drive Motor
Gyro Rotor
Battery
Fig. 1.1. Thebasic configuration of the robot
—nominallyaligned with the wheel and spinning in the direction of forward
motion. The flywheel’s angularmomentum produceslateralstabilitywhen the
wheel is stopped
or
mo
ving
slo
wly.
Gyroverhas anumberofpotential advantages over multi-wheeled vehicles:
1. Thee
nt
ire system can be
enclosedw
ithin the
wheel to prov
ide mec
hanical
ande
nv
ironmentalprotectionf
or equipmenta
nd mech
anisms.
2. Gyrove
ri
sr
esistanttogetting stucko
no
bstacles because it
hasnob
ody
to hang up,noexposed appendages,and theentire exposed surface is live
(driven).
3. Thetiltable flywheel can be used to rightthe vehicle fromits statically
stable, rest position (onits side). The
wheel has no
“backside” on
which
to get stuck
.
4. Withouts
pecial steeringm
echanism, Gyrovercan turn in
place by
simply
leaningand precessing in the desireddirection forenhancing maneuver-
ability.
5. Single-pointcontactwith the ground eliminates the need to accommodate
uneven surfacesand simplifiescontrol.
6. Full drivetractionisavailable because allthe weightisonthe single drive
wheel.
7. Alarge pneumatictire mayhavevery lowground-contactpressure,result-
ing in minimal disturbance to the surface andminimum rolling resistance.
The tire maybesuitable fortraveling on soft soils, sand,snoworice; riding
over brush or other vegetation;or, with adequate buoyancy,for traveling
on water.
Potentialapplicationsfor Gyroverare numerous. Because it cantravelon
both land and water, it mayfind amphibioususe on beaches or swampy areas,
for generaltransportation,exploration, rescue or recreation. Similarly,with
appropriate tread,it should travel well over soft snowwith good tractionand
1.2
De
sign
7
minimal rolling resistance. As asurveillance robot, Gyrovercould useits slim
profile to pass throughdoorwaysand narrowpassages,and its abilitytoturn
in place to maneuverintightquarters. Anotherpotentialapplication is as a
high-spe
ed
lunar
ve
hicle,w
here
the
ab
sence
of
aero
dynamic
di
sturbances
and
lo
wg
ra
vity
wo
uld
pe
rmite
fficien
t,
hi
gh-sp
eed
mobilit
y.
As
its
de
ve
lopmen
t
progresses, we anticipate thatother,morespecific uses will become evident.
1.2.2Mechanism Design
We have studied the feasibilitythroughbasicanalysisand simpleexperiments,
and designed andbuilttwo,radio-controlled (RC) working models. These
have proventhe conceptworkable,and have verifiedmanyofthe expected
advantages.
Given abasicunderstanding of thegyroscopic principle and wheel dynamic
stability, ourfirst task wastofind amechanism for steering the wheel along
ad
esired path. Turning (steering)ofthe wheelisthe result of
gyroscopic
precession aboutthe yawaxis, caused by roll torquesasexplained above. We
considered two
mec
hanisms forproducing this torque: lateral shiftingo
fw
eight
within the vehicle;and leaningofthe wheel.With regardtothe first approach,
the need to prov
ide adequate in
ternal space for shiftingl
arge massesw
ithin
thevehicle is asignificantdrawback.Moving the mass outside the wheel’s
envelopeisunappealing because of theeffectivebroadeningofthe vehicle
andp
otential for the
mova
ble mass
to
con
tact theg
round or other obstacles.
Allowing the entire wheel to lean employs the complete weightofthe wheel
to shiftl
aterally–
notjust ar
elatively small,
mova
ble mass
–togenerate the
needed roll torque.Leaning of the wheel, canbeeffected by the useofinternal
reactionwheels or masses, butthesetend to acquirekinetic energy,become
ve
locity-saturated, andgenerate angular momentum that
cancorrupt ve
hicle
behavior.Anotherway is to react against an internalgyroscope as described
abov
e; this mechanism hasb
een implemented andoperatedsuccessfully.
Several alternative configurations were considered. Asphericalshape,
whichcan be statically stable, does notexhibit the natural steering behavior
resulting fromthe interactionofgravitational (overturning)torqueand the
gyroscopic effect. In fact, anarrowtire-contact area is desirable for steering
responsiveness (dependentonthe gravitational torque for agiven leanangle).
Twowheels,side-by-side provide static stability, but aresensitivetoroll dis-
turbances, do notexhibit the same natural steeringbehavior, and will not roll
stably on two wheels aboveacritical speed. (Observe thebehavior of ashort
cylinder, suchasaroll of tape, rolled alongthe floor.) Outboard wheels, either
on the sides or front/back, were considered forstatic stabilityand steering ef-
fects,aswell as acceleration and braking enhancement;but in additionto
mechanical complexity, these defeat thebasicelegance and controlsimplicity
of theconcept. Actually, therobot hasthe potential to be statically stable to
provide asolidbase of supportfor sensors, instruments or small manipulators,

81
In
tro
duction
etc., simply by resting on its side. The presentconcept, totallyenclosedinthe
single wheel,provides asimple, reliable, rugged vehicle.
Experimental work to date includes several simple experiments to verify
the
st
abilit
ya
nd
steering
princ
iple,
an
dt
hree
wo
rking
ve
hicles.
1.2.3 Sensors and Onboard Computer
Thelatest modelweare using currently is Gyrover III.Itisbuiltwith alight-
weightbicycle tire andrim andaset of transparentdomes. It includes aradio
system forremote control, on-board computer and anumberofsensors to
permitdata-logging andon-boardcontrol of themachine’s motion.
Thereare 3actuating mechanisms in Gyrover:(i) Gyro tilt servo,(ii) Drive
motor, and (iii) DC gyro motor. Table 1.1gives adetailed description of each
of them.
Actuator Symbol Descriptions
Gyro tiltservo u
0
The tiltservocontrols the relative
angle of
the gyro spin
axiswith respectt
othe wheel axis. In
fact, by
controlling
the tiltservo, we
are able to
controls the lean angle angle
of the robot indirectly.
Drivem
otor
u
1
The robot forward/backward drivesystem uses a2-stage,
tooth belt system to amplifythe torque from the drive
motor.
DC gyro motor u
2
This motor cause the internal gyro to spin at adersirable
operating speed, increase the angular momentum of the
gyro.
Table 1.1. Table of differentactuating mechanisms in Gyrover.
Anumberofon-boardsensors have been installed on Gyrovertoprovide
information aboutthe statesofthe machine to the on-board computer. The
information includes:
• Gyro tilt angle, β
a
• The servocurrent
• Drivemotor current
• Drivemotor speed
• Gyro speed, ˙γ
a
• Angular rate (3-axes: Roll-Pitch-Yaw),
˙
β ,˙γ and˙α
• Accleration (3-axes: Roll-Pitch-Yaw),
¨
β ,¨γ and¨α
• Robot tilt angle (Roll),
β
All these signals, plusthe control inputs fromthe radio transmitter, can
be readbythe computer. Acustom-builtcircuit boardcontains thecontrol
computer and flashdisk, interface circuitry for the radio system and servos,
1.2
De
sign
9
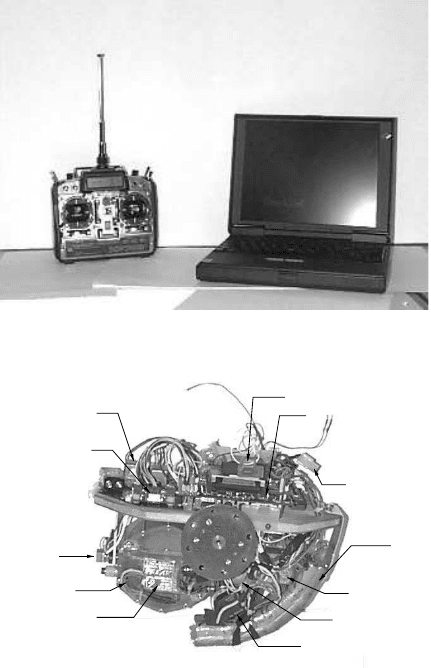
Fig. 1.2. Communication equipment: radio transmitter (left) and
laptops with wireless Modem (right).
Gyro
Accelerometer
SensorsA
ssembly
Radio Receiver
I/O Board
PowerCable
Tilt Servo
Battery
DriveMotor and Encoder
Gyro Tilt Po
tentiometer
Speed Controller
Speed Controller
Fig. 1.3. Hardware configuration of the robot.
components andlogic to control powerfor theactuators, andaninterface for
the on-board sensors. The on-board processing is performedbya486 Cardio
PC.
In addition, several more sensors areplanned to be incorporated with our
control
algorithms in
the
near future. Visual
pro
cessing capabilityo
ra
Global
Positioning System (GPS) is abig issue forautonomous control, however, due
to the structurallimitationofthe robot, we have notequippedthe robotwith
this kind of device yet.
An on-board100-MHZ 486 computerwas installed in the robot to deal
with on-board sensing and control. Aflash PCMCIA card is usedasthe hard
diskofthe computer. It communicateswith astationary PC via apair of
wirelessmodems. Based on this communicationsystem, we can download the
sensor data file fromthe on-boardcomputer, send supervising commands to
the robot, andmanually control the robot throughthe stationaryPC. More-

10
1I
nt
ro
duction
over, another radio transmitter is installed forhuman operatorstoremotely
control the robotvia two joysticks of the transmitter(Fig 1.2).One usesthe
transmittertocontrol thedrivespeed and tilt angle of therobot, hence, we
can
re
cord
the
op
er
ator’s
dri
ving
data.
Numerous sensors areinstalled in therobot to measure the state vari-
ables(Fig1.3). Twopulseencoders were installed to measurethe spinning
rate of flywheel and the wheel. Furthermore, we have twogyros andanac-
celerometertodetect the angular velocityofyaw,pitch, roll, and acceleration
respectively.A2-axis tilt sensor is developedand installed fordirect measur-
ing the lean angle andpitchangle of therobot. Agyro tilt potentiometer is
usedtocalulatethe tilt angle of theflywheel and it’s rate change.
Theonboardcomputer is run on an OS,called QNX, whichisareal-
time microkernel OS developed by QNX Software SystemLimited. Because
of handling numerous sensors and communicating with the stationary PC,the
robo
t’s soft
ware system is dividedi
nt
ot
hreemain programs:(1)communica-
tion server, (2)sensor server and (3)controller.The communication server is
usedtocommunicate between the onboardcomputerand thestationary lap-
top computer via RS232, while as
ensor serve
ri
su
sed to
handlea
ll the sensors
and actuators. The controller program implementsthe control algorithm and
communicates amongtheses
ervers.
All
these programs arerun independently
in order to allowreal-time control of therobot.
1.2.4 Implementation
The first vehicle, Gyrover I, shown in Figure 1.4, was assembled from RC
model airplane/car components, and quickly confirmed the concept. The ve-
hicle has a diameter of 29 cm and mass of 2.0 kg. It can be easily driven and
Fig. 1.4. The first prototypeofthe robot

1.2
De
sign
11
steered by remote control; hasgood high-speed stabilityonsmooth or rough
terrain; andcan be kept standing in place.This vehicle hastraveled at over
10 kph,negotiated relatively roughterrain (a small gravel pile), and traversed
a4
5-degree
ramp
75%
itsh
eigh
td
iameter.
Reco
ve
ry
fromf
alls(
resting
on
ther
ound
side
of
thew
heel)
ha
sb
een
ac
hiev
ed
with
a
strate
gy
us
ing
bo
th
the
wheel
forw
ard
dri
ve
andg
yro-tilt
con
trol.
The
ma
in
sh
ortcomings
of
th
is
ro
bo
t
areits lackofresilience andvulnerabilitytowheeldamage;excessivebattery
drain due to dragonthe gyro (bearingand aerodynamics); inadequate torque
in the tilt servo; andincompleteenclosure of thewheel.
Fig. 1.5. The second prototypeofthe robot
Thes
econd ve
hicle,Gyrove
rI
I, (Figure 1.5) wasdesigned to address these
problems.Itisslightly larger than Gyrover I(34 cm diameter, 2.0 kg), and
alsoutilizes manyR
Cmodel parts. Tilt-serv
otorqueand trav
el
were both
approximately doubled. GyroverIIuses agyro housed in avacuum chamber
to cut powerconsumption by 80%, whichincreasesbatterylife fromabout
10 minu
tes to
50
minutes. The
entire robot
is
housed insideas
pecially de-
signed pneumatic tire whichprotectsthe mechanismfrommechanical and
environmental abuse,and provides an enclosure that is resilient, although less
rugged than hoped. Therobot contains avarietyofsensors to monitor motor
currents, positions andspeeds, tire and vacuumpressure,wheel/body orien-
tation, andgyro temperature. Gyrov
er
II
hasb
een assembled anddriven by
manualremote control on asmoothfloor, andhas shown the abilitytofloat
andbecontrollable on water.
Thethird version,GyroverIII,(Figure 1.6)was designed on alarger scale
to permitittocarry numerous inertial sensors andacomputer(486 PC) for
data acquisitionand/or control. This machine utilizes alightweight, 40 cm
bicycle tire andrim, and apair of transparentdomesattachedtothe axle.
Overall weightisabout 7
kg.Heavy-duty R/Cmotorsand servoare usedto
spin the gyro,drivethe wheel forwardand controlgyro tilt. GyroverIII trav-