Weinan E. Principles of Multiscale Modeling
Подождите немного. Документ загружается.

6.1. SOME CLASSICAL EXAMPLES 257
t
υ υ υ
υ υ υ
υ υ υ
∆t
x
∆x
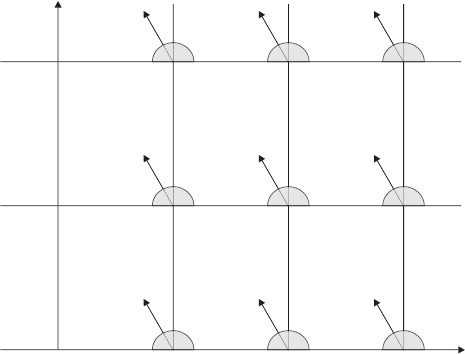
Figure 6.2: Schematics for the derivation of kinetic schemes: A finite volume method is
imposed in the x−t domain, and the kinetic equation is solved (e.g. analytically) over the
shaded region to give the fluxes needed in the finite volume method. The v axis indicates
the extra velocity variable in th e kinetic model, which represents the microstructure for
the present problem.
258 CHAPTER 6. CAPTURING THE MACROSCALE BEHAVIOR
6.1.4 Cloud-resolving convection parametrization
Cloud-resolving convection parametrization (CRCP), or super-parametrization, is a
technique introdu ced by Grabowski and Smolarkiewicz [42] in which the large scale trop-
ical dynamics of the atmosphere is captured by embedding cloud scale models at each
grid point of a large scale model. The macroscale model is a large eddy simulation model.
However, in contrast to standard large eddy simulation, the effects of the sub-grid scales
are modeled not by empirical models, but rather through the introduction of explicit
cloud scale models. We will omit the details here and refer the interested reader to the
original article [42]. For more recent development on this subject, see [75].
6.2 Multi-grid and the equation-free approach
Given the success of these different multiscale methods, it is natural to ask whether
we can formulate a general framework. In the case of solving differential equations,
such general strategies have proven to be very useful. A good example is the finite
element method which has provided not only a general designing principle for numerical
algorithms but also general guidelines for error analysis. In recent years, several attempts
have b een made to construct general strategies for multiscale methods. In the following,
we will discuss three examples of such general strategies, the extended multi-grid method,
the heterogeneous multiscale method, and the equation-free approach.
6.2.1 Extended multi-grid method
One of the first attempts to construct a general framework for multiscale modeling
was the extension of the multi-grid met hod by Achi Brandt. In its original form [4, 44],
the multi-grid method is an efficient way of solving the algebraic equations obtained from
discretizing PDEs (see Section 3.1). The objective was to find accurate solutions of the
PDE. Since the 1990’s, Brandt and others have discussed the possibility of extending the
traditional multi-grid method in a number of directions [5]:
1. The models used at the different scales can be quite general and quite different in
nature. For example, one may use Monte Carlo methods or molecular dynamics at
the small scale, and traditional continuum models at the large scale.
6.2. MULTI-GRID AND THE EQUATION-FREE APPROACH 259
2. The traditional multi-grid method is an efficient solver for the fine scale details of
the problem. In the extended version, one might be only interested in capturing
the macroscale behavior using macroscale models. This is particularly useful in
cases when closed-form macroscale models are not available, and it is desirable to
have numerical algorithms that are capable of capturing the macroscale behavior
directly. In this case, one might even be able to reconstruct the effective macroscale
model at the end of the computation. To quote from [5]: “At sufficient coarse level,
this entire algorithm effectively p roduces macroscopic ‘equations’ for the simulated
system .... This can yield a macroscopic numerical description for the fluid even for
those cases where the traditional derivation of closed-form differential equations is
inapplicable.”
3. One may limit the microscopic simulation at the fine levels to small spatial-temporal
domains. As was remarked by Brandt: “few sweeps are enough, due to the fast
CMC (conditional Monte Carlo) equilibration. This fast equilibration also implies
that the interpolation can be done just over a restricted subdomain, serving as
window: In t he window interior fine-level equilibration is reached.”
4. Renormalization group ideas are integrated into the new multi-grid method.
The general procedure is quite similar to standard multi-grid methods. At each cycle,
one repeats the following steps at the different levels of grids [5]:
1. Interpolation: The current values of the state variables on the coarse level are used
to initialize or constraint the (micro) model at the fine level.
2. Equilibration: Run the fine-level model (on small windows) for a number of steps.
3. Restriction (projection): Project the variables at the fine level back to the coarse
level.
This is a two-level procedure. Generalization to multiple levels is straightforward. Unlike
in traditional multi-grid methods in which the successive coarse and fine levels are simply
nested finite difference or finite element grids, here the coarse and fine levels can be very
different and very far apart.
260 CHAPTER 6. CAPTURING THE MACROSCALE BEHAVIOR
Brandt also described applications to many different areas, including electronic struc-
ture analysis, solving integro-differential equations, modeling high frequency wave prop-
agation, Monte Carlo methods in statistical mechanics, complex fluids and image pro-
cessing [5].
Brandt’s picture is very broad and very appealing. However, at an algorithmic level,
it is quite unclear to the present author how one can carry out such a program in practice,
even though a lot has been written on the subject (see, for example, [5] and the references
therein). We will return to this discussion later in the chapter.
6.2.2 The equation-free approach
The equation-free approach is another framework for addressing the same kind of
questions based on a similar philosophy. It consists of a set of techniques including
coarse bifurcation analysis, projective integrators, the gap-tooth scheme and the patch
dynamics [51]. At an abstract level, equation-free is built on a three-stage “lift-evolve-
restrict” coarse time-stepper procedure [51]. Given a macroscopic state, U(t), at some
time t, the coarse time-stepper consists of the following basic elements [51]:
1. Lift: Transform the macroscale initial data to one or more consistent microscopic
realizations.
2. Evolve: Use the microscopic simulator (the detailed time-stepper) to evolve these
realizations for the desired short macroscopic time τ , generating the value(s) u(τ, t).
3. Restrict: Obtain the restriction of u and define the coarse time-stepper solution as
T
τ
c
U(t) = Mu(τ, t).
Here M is the restriction operator that maps micro-state variables to macro-state vari-
ables.
So far this is very similar to a two-level “interpolate-equilibrate-restrict” multi-grid
procedure. The additional component of the equation-free approach is to exploit scale
separation in the problem using interpolation (in space) and extrapolation (in time)
techniques.
Coarse projective integration
6.2. MULTI-GRID AND THE EQUATION-FREE APPROACH 261
In coarse projective integrators, one generates an ensemble of microscopic solutions
for short times, by running the microscopic solver with an ensemble of initial data that are
consistent with the current macro-state. One evaluates the average values of the coarse
variables over this ensemble. The time derivatives for the coarse variables are computed
using these averaged values and these coarse time derivatives are used to extrapolate the
coarse variables over a much larger time step.
Consider the example
˙
x
ε
= f(x
ε
, y
ε
, t), x
ε
(0) = x
˙
y
ε
=
1
ε
g(x
ε
, y
ε
, t), y
ε
(0) = y
(6.2.1)
where (x, y) ∈ R
n
×R
m
. Here the macroscale variable of interest is x. For this problem,
the projective integrator proceeds in two steps:
1. Relaxation step: In the simplest case of a forward Euler scheme with micro time
step δt, we have
ˆ
x
n,m+1
=
ˆ
x
n,m
+ δtf (
ˆ
x
n,m
,
ˆ
y
n,m
, t
n
+ mδt)
ˆ
y
n,m+1
=
ˆ
y
n,m
+
δt
ε
g(
ˆ
x
n,m
,
ˆ
y
n,m
, t
n
+ mδt)
(6.2.2)
with some initial data
ˆ
x
n,0
and
ˆ
y
n,0
, m = 0, 1, ··· , M − 1.
2. Extrapolation step: Compute the approximate value of
˙
x
n
and then extrapolate:
˙
x
n
=
x
n,M
− x
n,M−1
δt
(6.2.3)
x
n+1
= x
n
+ ∆t
˙
x
n
If one wants to construct higher order schemes, one uses higher order extrapolation:
¨
x
n
=
x
n,M
− 2x
n,M−1
+ x
n,M−2
(δt)
2
(6.2.4)
x
n+1
= x
n
+ ∆t
˙
x
n
+
1
2
(∆t)
2
¨
x
n
and so on.
A main advantage of the projective integrators is that they are relatively simple in
the cases when they apply.
262 CHAPTER 6. CAPTURING THE MACROSCALE BEHAVIOR
Dealing with the space variable
Brandt noticed that due to the fast equilibration of the microscopic model, it might
be enough to conduct the microscopic simulations on “small windows”. The “gap-tooth
scheme” builds on a similar intuition.
The basic idea of the gap-to oth scheme is to “use the microscopic rules themselves,
in smaller parts of the domain and, through computational averaging within the sub-
domains, followed by interpolation, to (we) evaluate the coarse field U(t, x), the time-
stepper, and the time derivative field over the entire domain” [51].
“Given a finite dimensional representation
U
N
j
of the coarse solution (e.g. nodal
values, cell averages, spectral co efficients, coefficients for finite elements or empirical basis
functions) the steps of the gap-tooth scheme are the following.
1. Boundary conditions. Construct boundary conditions for each small box b ased on
the coarse representation
U
N
j
.
2. Lift. Use lifting to map the coarse representation
U
N
j
to initial data for each
small box.
3. Evolve. Solve the detailed equation (the microscale model) for time t ∈ [0, τ] in
each small box y ∈ [0, h] ≡ [x
j
− h/2, x
j
+ h/2] with the boundary conditions and
initial data given by steps (1) and (2).
4. Restrict. Define the representation of th e coarse solution at th e next time level by
restricting the solutions of the detailed equation in the boxes at t = τ” [51].
One interesting application of the gap-tooth scheme is presented in [38] in which
a particle model was used to capture the macroscale dynamics of the viscous Burgers
equation. The microscale mo del is a one-dimensional Brownian dynamics model:
˙x
j
(t) = u
δ
j
(t) + ˙w
j
(t), (6.2.5)
where x
j
(t) is the position of the j-th particle at time t, the { ˙w
j
}’s are ind ependent
white n oises, u
δ
j
(t) is the drift velocity, which is defined to be the density of particles
over an interval of length δ centered at x
j
(t). To apply the gap-tooth scheme, microscale
simulation boxes of size δ are put uniformly on the real axis. Particle simulations of
(6.2.5) are carried out inside the boxes. At each macroscopic time step n, particles are
initialized according to the known local (macroscopic) density at that time step. The
6.2. MULTI-GRID AND THE EQUATION-FREE APPROACH 263
boundary condition for the particle simulation is imposed as follows. For the k-th box,
there is an outgoing flux (number of particles that exit the box per unit time) and
there is an incoming flux at the left and right side of the box. These are denoted by
j
ℓ,+
k
, j
ℓ,−
k
, j
r,+
k
, j
r,−
k
respectively. The outgoing fluxes j
r,+
k
, and j
ℓ,−
k
can be measured from
the simulation. The incoming fluxes j
ℓ,+
k
, j
r,−
k
will have to be prescribed. One possibility
is to set
j
ℓ,+
k
= αj
r,+
k−1
+ (1 − α)j
r,+
k
(6.2.6)
j
r,−
k
= αj
ℓ,−
k+1
+ (1 − α)j
ℓ,−
k
(6.2.7)
where α = δ/∆x, δ is the size of the box, ∆x is the distance between the centers of
adjacent boxes. To implement this boundary condition, particles that come out of a box
are either “tele-transported” to the next b ox, or put back into the same box from the
other side, according to a probability distribution specified by the boundary condition
shown above. The above corresponds to a linear interpolation. Quadratic interpolations
are also discussed in [38].
To update the particle density at the next time step t
n+1
= (n + 1)∆t, the particle
densities at that instant of time inside the boxes are computed, and interpolated in space
to give the macroscopic density profile at the new time step.
Patch dynamics
Patch dynamics is a combination of the projective integrators and the gap-tooth
scheme. It consists of the following [51]:
1. Short time steps. Repeat the gap-tooth time stepper a few times, i.e. compute patch
boundary conditions, lift to patches, evolve microscopically and then restrict.
2. Extrapolate. Advance coarse fields for a long time step into the future through
projective integration. This first involves estimation of the time-derivatives for the
coarse field variables, using the successively reported coarse fields followed by a
large projective step.
An example of patch dynamics will be presented in Section 6.7.
264 CHAPTER 6. CAPTURING THE MACROSCALE BEHAVIOR
6.3 The heterogeneous multiscale method
6.3.1 The main components of HMM
We now turn to the framework of the heterogeneous multiscale method (HMM). The
general setup is as follows. At the macroscopic level, we have an incomplete macroscale
model:
∂
t
U = L(U; D) (6.3.1)
where D denotes the data needed in order for the macroscale model to be complete. For
example, for complex fluids, U might be the macroscopic velocity field and D might be
the stress tensor. In addition, we also have a microscopic model:
∂
t
u = L(u; U). (6.3.2)
Here the macroscale variable U may enter the system as constraint. We may also write
the macro and micro models abstractly as:
F (U, D) = 0 (6.3.3)
f(u, d) = 0, d = d(U)
d is the data needed in order to set up th e microscale model. For example, if the mi-
croscale mo d el is the NV T ensemble of molecular dynamics, d might be the temperature.
(6.3.1) or (6.3.3) represent the knowledge we have about the possible form of the
effective macroscale model.
The general philosophy of HMM is to solve the incomplete macroscale model by
extracting the needed data from the microscale model. The coupling between the macro
and micro models are done in such a way that the macro-state provides th e constraints
for setting up the micro model and the micro model provides the needed constitutive
data D for the macro model. The two main components of HMM are:
1. A macroscopic solver. Based on whatever knowledge that is available on the
macroscale b ehavior of the system, we make an assumption about the form of
the macroscale model, from which we select a suitable macroscale solver. For ex-
ample, if we are dealing with a variational problem, we may use a finite element
method as the macroscale solver.

6.3. THE HETEROGENEOUS MULTISCALE METHOD 265
U F(U, D) = 0
u
f(u, d) = 0
compression
reconstruction
constraints
data estimation
Figure 6.3: Schematics of the HMM framework
2. A procedure for estimating the missing macroscale data D using the microscale
model. This is typically done in two steps:
(a) Constrained mi croscale simulation: At each point where some macroscale data
is needed, perform a series of microscopic simulations which are constrained
so that they are consistent with the local value of the macro variable.
(b) Data processing: Use the results from the microscopic simulations to extract
the macroscale data needed in the macroscale solver.
Consider for example the case when the microscale model is an elliptic equation with
multiscale coefficients:
−∇ · (a
ε
(x)∇)u
ε
(x) = f (x) (6.3.4)
Assume that the macroscale model is of the form
−∇ · (A(x)∇)U (x) = f (x) (6.3.5)
Naturally, as the macroscale solver, we choose standard finite element methods, e.g. the
piecewise linear finite element method, over a coarse mesh. The data that need to be
estimated is the stiffness matrix for the finite element method. If A = A(x) were known,
we would simply follow standard practice and use numerical quadrature to compute the
elements in the stiffness matrix. Since A is not known, we set up a microscale simulation
around each quadrature point in order to estimate the needed function value at that
quadrature point. The details of this procedure will be discussed in Chapter 8.

266 CHAPTER 6. CAPTURING THE MACROSCALE BEHAVIOR
As a second example, consider incompressible polymeric fluid flows for which the
macroscale model is a continuum model for the macroscale velocity field U in the form:
ρ
0
(∂
t
U + (U · ∇)U) = ∇ · σ
∇ · U = 0
These are simply statements of the conservation of momentum and mass, for a fluid of
constant density ρ
0
. The u nknown data is the stress σ: D = σ.
Let us assume that the micro model is a molecular dynamics model for the particles
that make up the fluid:
m
j
d
2
y
j
dt
2
= f
j
, j = 1, 2, ··· , N (6.3.6)
Here m
j
, y
j
are respectively the mass and position of the j-th particle, f
j
is the force
acting on the j-th particle.
Given that the macroscale model is in the form of an incompressible flow equation, it is
natural to select the projection method as the macro-solver [11]. In the implementation of
the projection method, we will need the values of σ at the appropriate grid p oints. These
are the data th at need to be estimated. At this point, we have to make an assumption
about what σ depends on, this enters in the constraints that we put on the microscale
model. Let us assume that
σ = σ(∇U) (6.3.7)
We will constrain the molecular dynamics in such a way that the average strain rate
is given by the value of ∇U at the relevant grid point. In general, implementing such
constraints is the most difficult step in HMM. For the present example, one possible
strategy is discussed in [63].
From the results of molecular dynamics, we need to extract the values of the needed
components of the stress. For t his purpose, we need a formula that expresses stress in
terms of the output of the molecular dynamics. This can be obtained by modifying the
Irving-Kirkwood formula [49]. These details will be explained in Section 6.6.
In summary, three main ingredients are required in HMM:
1. a macro-solver, here the projection method;
2. a micro-solver, here the constrained molecular dynamics;
3. a data estimator, here the modified Irving-Kirkwood formula.