Тимофеев В.Н. (ред.) Применение магнитогидродинамических устройств в металлургии
Подождите немного. Документ загружается.

285
Уравнения (5.53) целесообразно представить в виде
.
p
C
M
,
pJ
aMM
,i
,B
p
C
M
,
i
pJaM
M
,
pJ
aMM
32
23
23уд
3
33н3yд
3
1212
3223
23
23yn
1212
222223yn
12n
1
1112n1д
1
(5.54)
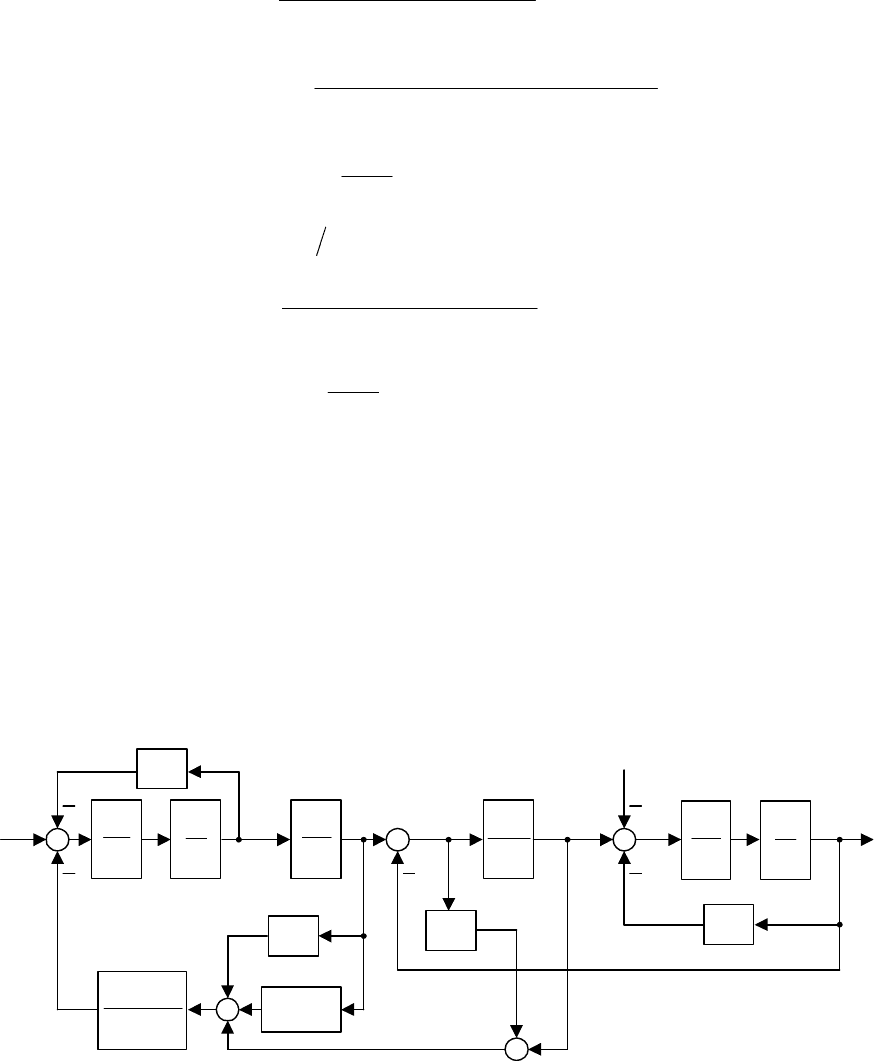
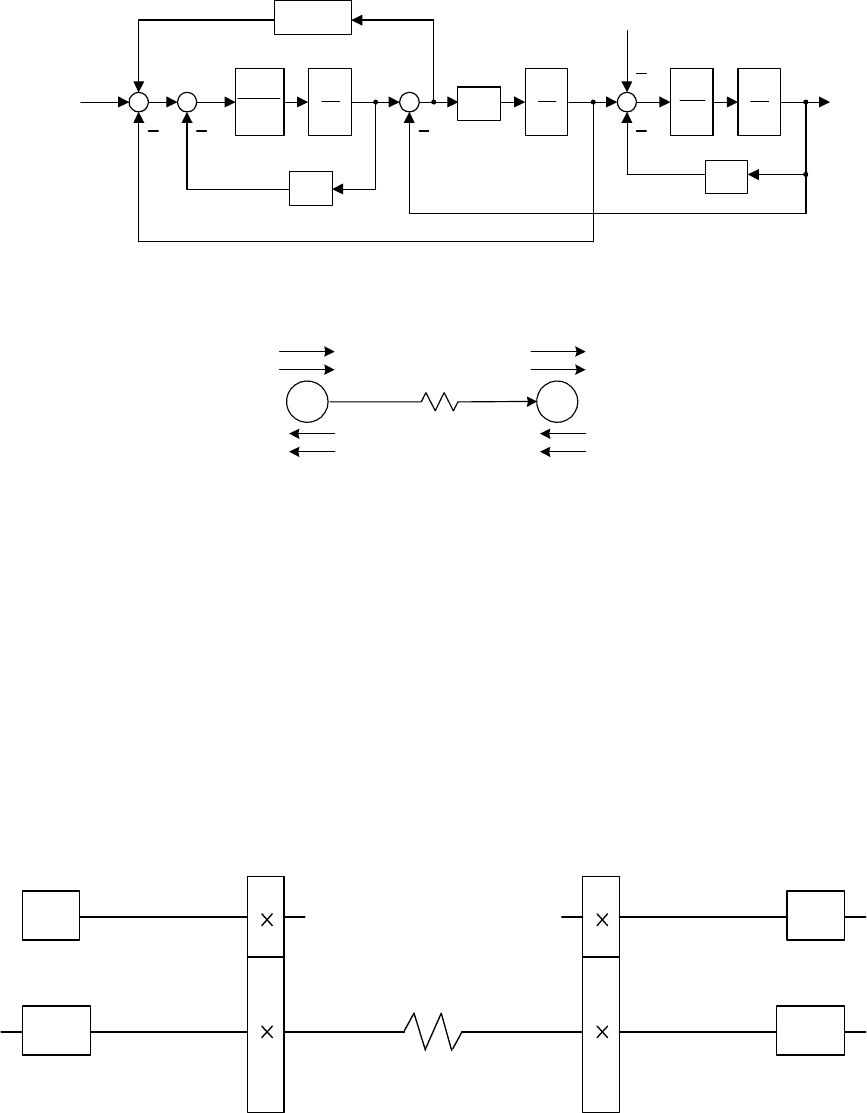
С помощью уравнений (5.54) составим структурную схему трехмассовой
взаимосвязанной механической системы (рис. 5.45). Входным управляющим
воздействием в этой модели является вращающий момент двигателя М
д1
,
возмущающим воздействием – момент сопротивления рабочей машины М
н
.
Регулируемыми переменными могут быть угловые скорости
1
,
2
или
3
,
угловые перемещения f
1
, f
2
, f
3
(на модели не показаны), а также момент
упругого взаимодействия между массами.
Рис. 5.45
1212
1
i
1
1
J
p
1
12
1
i
1
a
p
C
23
3
1
J
p
1
3
a
2
a
pJ
2
23
B
3уд
M
н
M
3
w
2
w
1
w
1д
M
23уn
M
286
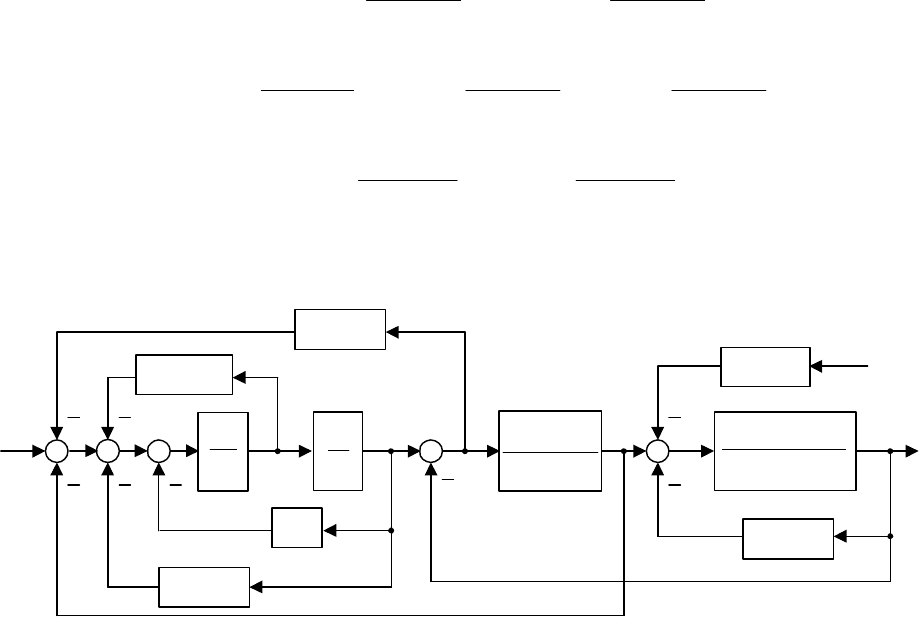
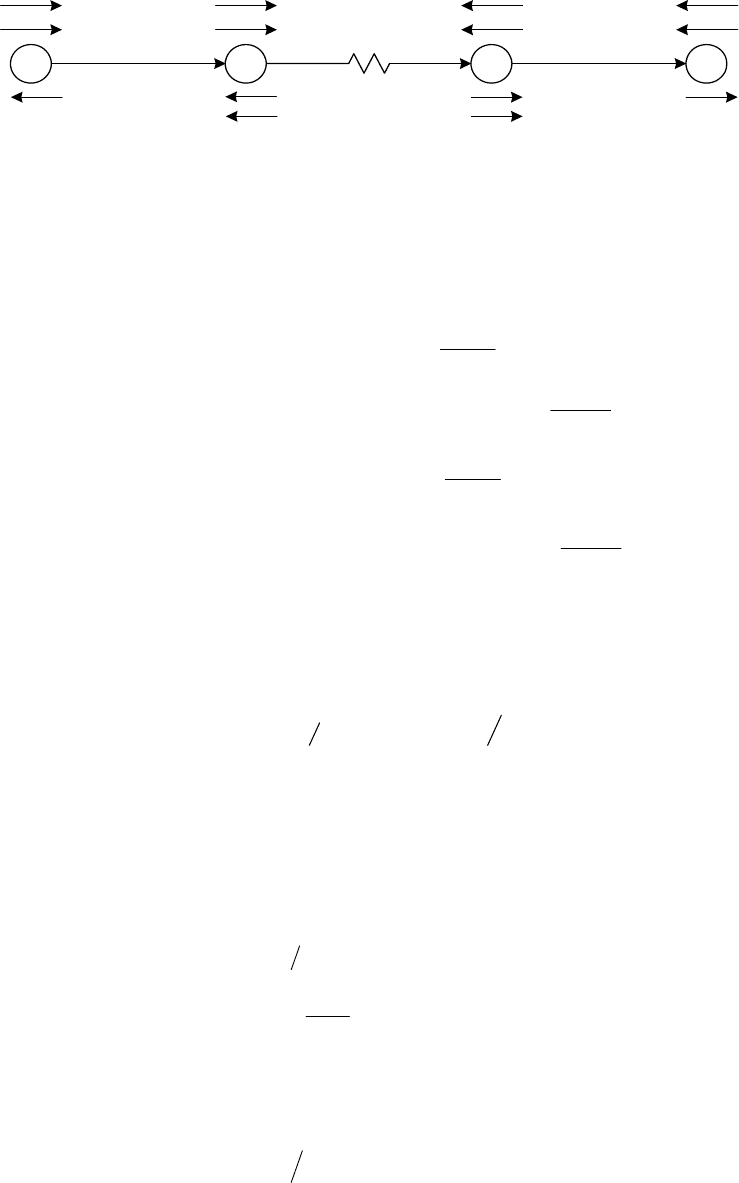
Для приведения системы к переменной
1
(валу двигателя) примем за
входное воздействие М
д1
, а за выходную переменную
1
и, используя
эквивалентные преобразования теории управления, представим структурную
схему (рис. 5.45) в виде трехмассовой модели (рис. 5.46), приведенной к
переменной
1
. В соответствии с этой моделью коэффициенты приведения ее
параметров и воздействий определяются следующими соотношениями:
;
i
1
K;
i
1
K
12
2
12
2
J
1212
н
M
η
η
;
i
1
K;
i
1
K;
i
1
K
12
2
12
B
12
2
12
C
13
2
13
3
J
ηηη
.
i
1
K;
i
1
K
12
2
12
3
a
12
2
12
2
a
Рис. 5.46
После ряда структурных преобразований в итоге имеем двухмассовую
эквивалентную модель (рис. 5.47) преобразователя c приведенными
моментом инерции J
пр1
, J
пр3
, коэффициентами А
пр1
, А
пр2
, С
пр
и В
пр
и внешним
воздействием М
нпр
, а также внутренней переменной М
удпр
. Как следует из
структурной схемы, показанной на рис. 5.46, приведенные значения
указанных параметров, коэффициентов и воздействий эквивалентной модели
определятся выражениями:
1
1
J
p
1
1
a
pJK
J
33
1
33
aK
a
н
M
np
w
31
w
1д
M
p
CK
C 23
Мн
K
22
aK
a
удпр
M
22
JK
J
23
BK
B
287
.
;АМ;АМ;МКМКМ
;B
i
1
BKB;C
i
1
CKC
;a
i
1
aKA;a
i
1
aaKaaaA
;M
i
1
MKM;M
i
1
MKM
;J
i
1
JKJ;J
i
1
JJKJJJJ
1пр3
пр33прпр3с11прспр2уВ1уСупр
12
12
2
12
12Bnp12
12
2
12
12Cnp
3
12
2
12
3
3
a3np2
12
2
12
12
2
a1np211np
3уд
1212
1yCудпрн
1212
н
н
Mнnp
3
13
2
13
3
3
J3np2
12
2
12
12
2
J1np211np
а)
б)
Рис. 5.47
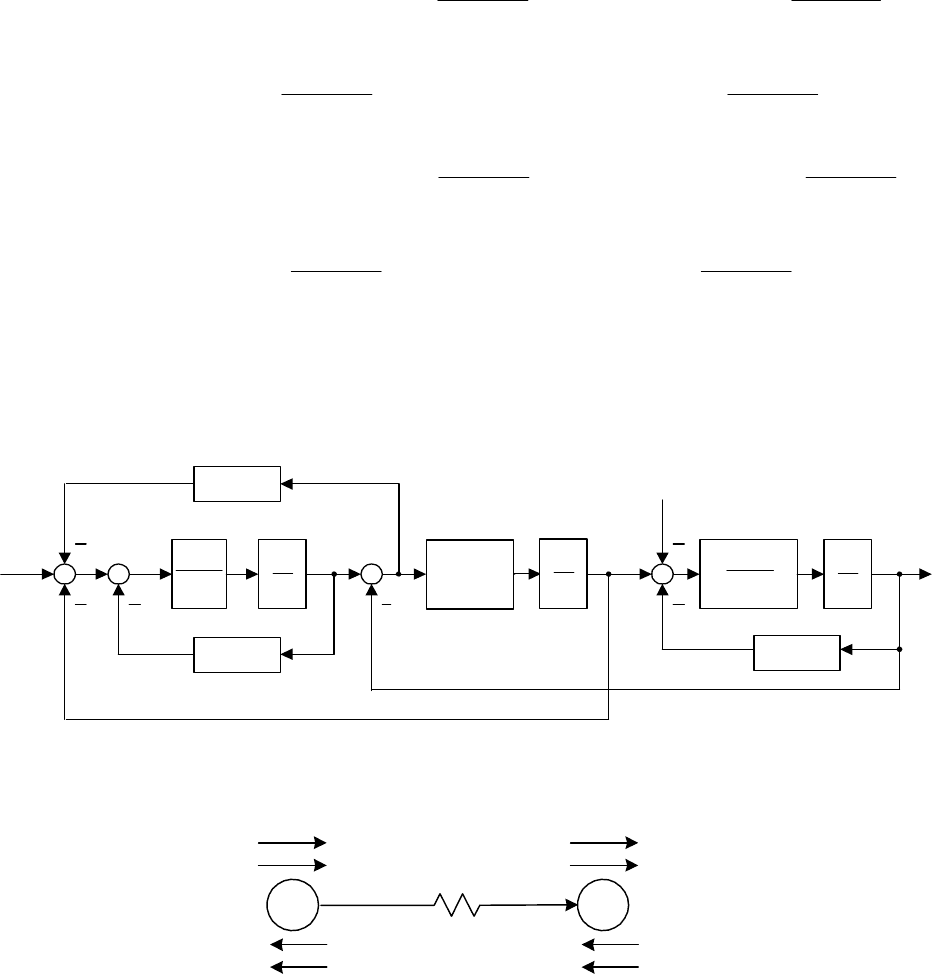
Аналогично может быть выполнено приведение системы к переменной
3
(к валу рабочей машины), для чего, приняв за входное воздействие М
н
, а
за выходную - переменную
3
, представим структурную схему (рис. 5.66) в
виде трехмассовой модели (рис. 5.69). Коэффициенты приведения модели к
переменной
3
:
1
1
np
J
p
1
p
1
3
1
np
J
p
1
3np
A
нnp
M
np
w
3
1
w
1д
M
np
C
удпр
M
np
B
3уд
M
1np
A
1д
M
упр
M
1
w
пр
w
3
нпр
M
прпр
BC ,
удпр
M
1пр
J
3пр
J
cпр
M
прc
M
3
288
;1Ka;1Ka
;iaK
;1K;1K
;1K ;1K
;iK
;iK
32
12
2
12
1
BC
3
J
2
J
12
2
12
1
J
1212
1д
M
Рис. 5.48
После приведения этой структуры к двухмассовой эквивалентной
модели (рис. 5.49) c приведенными моментом инерции J
пр2
, коэффициентом
А
пр2
и воздействием М
дпр
, получим выражения для определения приведенных
параметров и внешних воздействий в виде
1д12121д
1д
Mnp1д
2112
2
12
2112np12np
2112
2
12
21
12
J2np12np
MiMKM
aaiaaKaaaA
JJiJJKJJJ
11
1
JK
J
p
1
2
a
3
1
J
p
1
н
M
3
w
2
w
1д
M
p
C
12
11
aK
a
3уд
M
2
J
1
2
B
Mд
K
3
a
289
а)
б)
Рис. 5.49
Переменные М
у
и М
уд
модели (рис. 5.49, б) определяются выражениями:
М
у
= М
у1
+ М
у2
, М
уд
= М
у1
.
Далее рассмотрим структуру четырехмассовой механической передачи
(рис. 5.50) комбинированного электропривода с одной упругой связью.
Рис. 5.50, а
2
1
np
J
p
1
2np
A
p
1
p
1
н
M
3
w
2
w
npд
M
1
12
C
уд
M
12
B
спр
M
3
1
J
3
a
прд
M
1
у
M
2
w
3
w
н
M
1212
, BC
уд
M
2пр
J
3
J
cпр
M
3c
M
1д
M
1
J
1
w
2
J
2
w
Д1
1212
,i
1
2
РМ2
2н
M
12n
M
1н
M
2д
M
'
22уп
M
'
22
C
'2
РМ1
'
22уп
M
'
2
w
'
2
J
Д2
'1
'
1д
M
'
1
J
'
1
w
'
12п
M
'
12
'
12
,i
'
2д
M
290
Рис. 5.50, б
Для расчетной модели рис. 5.50, б могут быть записаны дифференциальные уравнения движения системы при передачи энергии от
двигателей к рабочим машинам
.i;i
,dtСМ
,iММ
,iММ
,
dt
d
JМММ
,
dt
d
JММ
,
dt
d
JМММ
,
dt
d
JММ
'
12
'
1
'
21212
'
22
'
22
'
22уп
'
12
'
12
'
12п
'
2д
121212п
'
1д
'
2
'
22н
'
22уп
'
2д
'
1
'
1
'
12п2д
2
21н
'
22уп
'
1д
1
112п1д
(5.55)
Используя операторную форму записи при нулевых начальных условиях, имеем:
.i
,pJММiМ
,pJММ
,
p
С
М
,i
,pJММiМ
,pJММ
'
12
'
1
'
2
'
2
'
22н
'
22уп
'
12
'
12
'
12п
'
1
'
1
'
12п2д
'
22
'
22
'
22уп
1212
221н
'
22уп121212п
1112п1д
(5.56)
Если (5.82) представить в виде:
1д
M
12п
M
1
w
2д
M
'
22уп
M
2
w
1212
,
i
1н
M
'
22
C
1
J
2
J
'
2
J
'
2
w
'
2д
M
2н
M
'
22уп
M
'
1
J
'
1
w
'
1д
M
'
12п
M
'
12
'
12
,
i
291
,pJММ
,i
,
pJ
iМММ
,
p
С
М
,
i
ММpJ
М
,i
,
pJ
ММ
'
1
'
12д
'
12п
'
12
'
2
'
1
'
2
'
12
'
12
'
12п2н
'
22уп
'
2
'
22
'
22
'
22уп
1212
1н
'
22уп22
12п
1212
1
12п1д
1
(5.57)
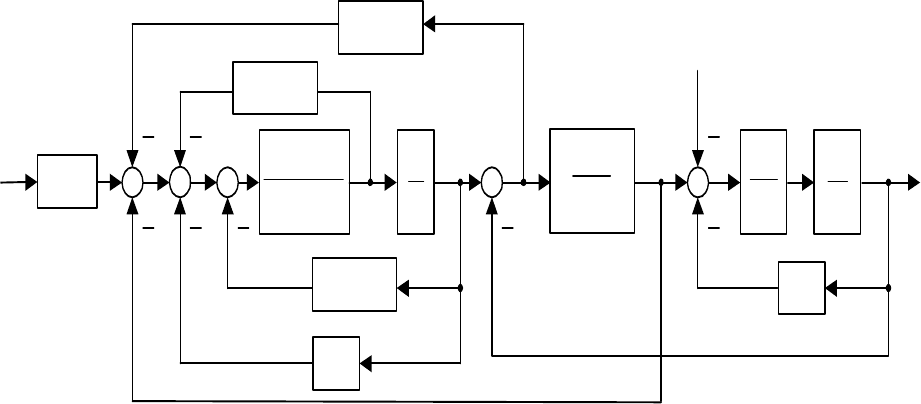
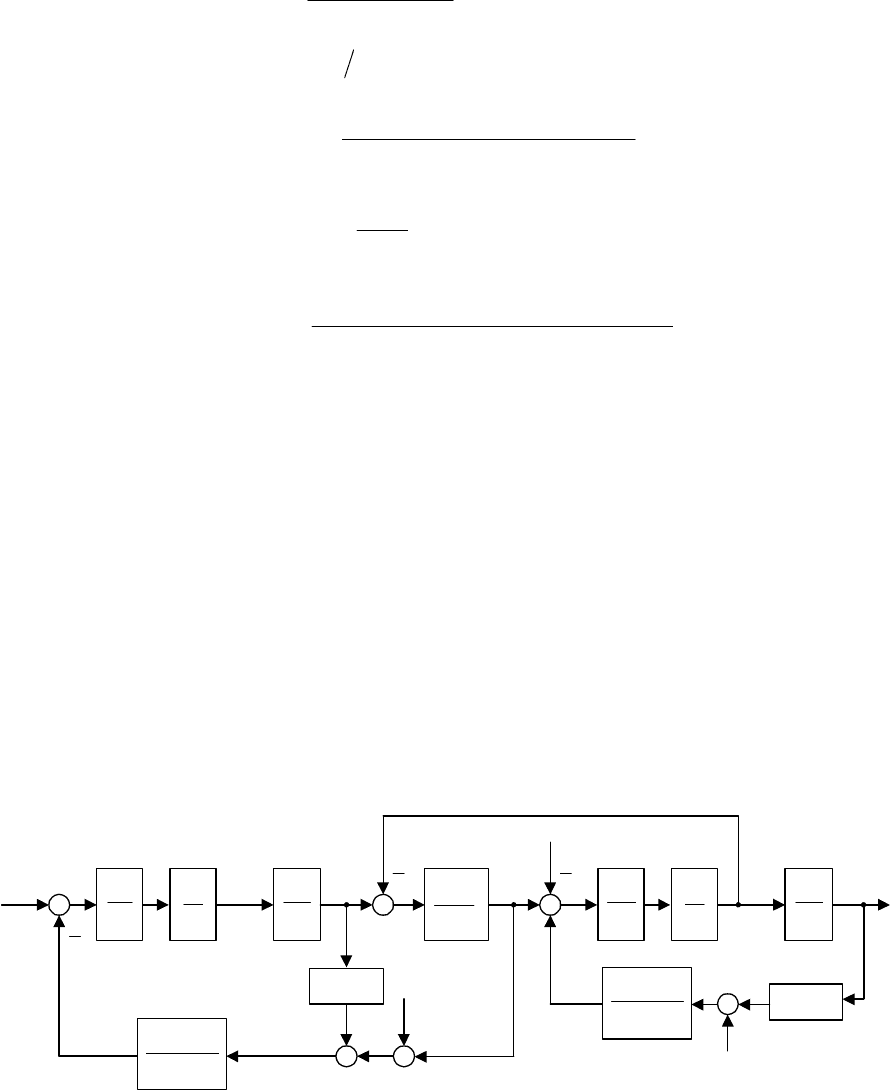
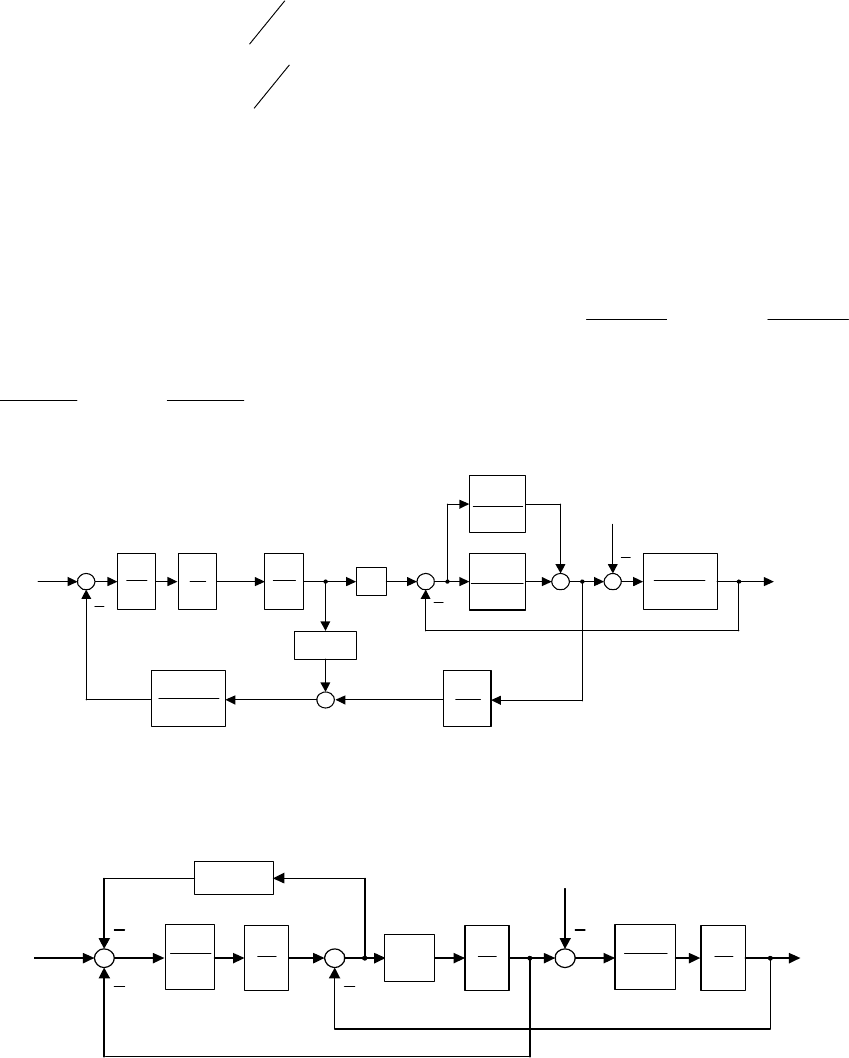
то можно легко сформировать структурную схему четырехмассовой
взаимосвязанной механической системы (рис. 5.51). Управляющими
входными воздействиями в этой структуре являются вращающие моменты
двигателей М
д1
и М
д2
, возмущающими воздействиями – моменты
сопротивления рабочих машин М
н1
и М
н2
. Регулируемыми переменными
могут быть угловые скорости
1
,
2
,
1
' или
2
', угловые перемещения, а
также момент упругого взаимодействия между массами.
Рис. 5.51
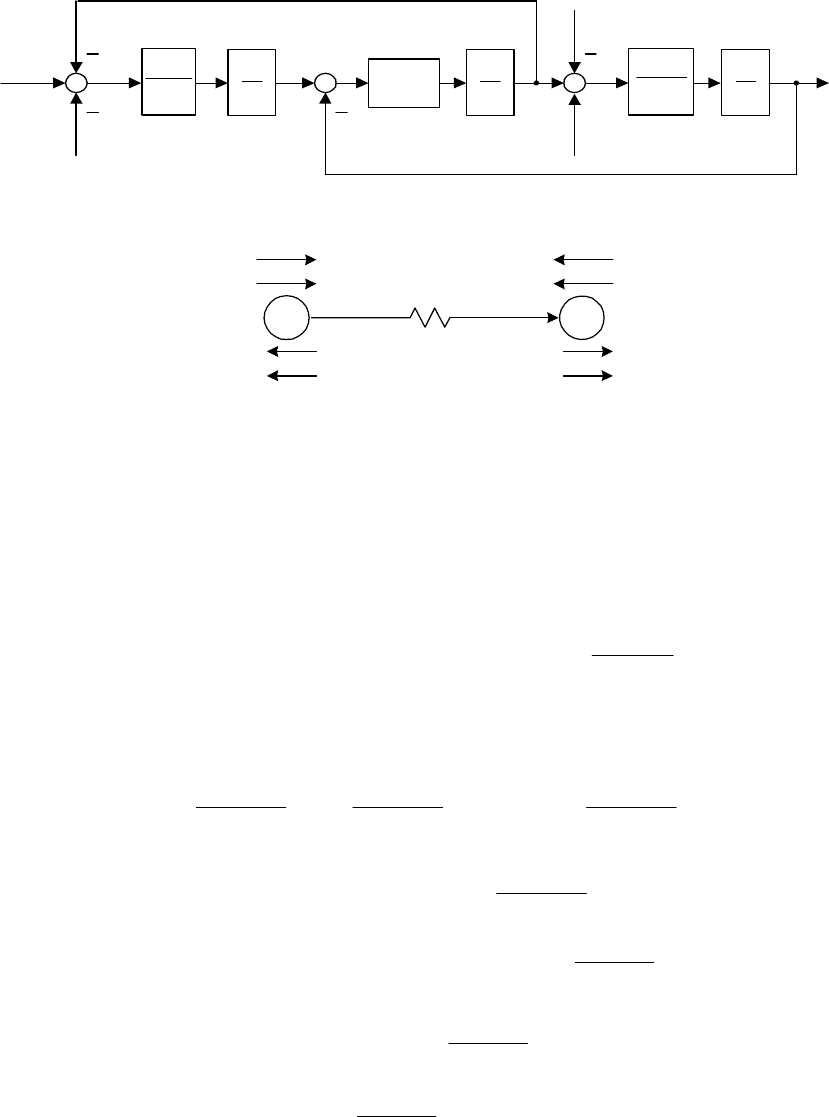
На рис. 5.52 показана модель рассматриваемого преобразователя,
приведенная к переменной
1
.
1
1
J
p
1
pJ
2
1н
M
1
w
1д
M
p
C
22
'
22уn
M
1212
1
i
12
1
i
2
w
'
1
w
'
2
1
J
p
1
'
2
w
'
12
1
i
'
12
'
12
1
i
pJ
'
1
2д
M
2н
M
292
а)
б)
Рис. 5.52
Приведенные значения параметров и воздействий определяются
выражениями:
;М
i
1
МKМ
;J
i
1
J1J
i
1
J
i
i
JKJKJJJ
;J
i
1
JJKJJJJ
1н
1212
1н1Мнпр1н
'
2
12
2
12
'
1
'
2
12
2
12
'
1
12
2
12
'
12
'2
12
2
'
2J
'
1
'
1J
'
пр2
'
пр1
'
пр2
2
2
2
12
122J1пр21пр1
.i;C
i
1
CKС
;М1М
i
i
МKМ
;М
i
1
МKМKМ
1221
'
пр2
'
22
12
2
12
'
22C
'
пр22
22
1212
'
12
'
12
22Мпр2
2н
1212
2н1Мн2н2Мнпр2н
np
J
1
1
p
1
p
1
'
2
1
np
J
p
1
npн
M
2
'
2 пр
w
1
w
1д
M
'
22 np
C
прн
M
1
npд
M
2
1д
M
'
22yn
M
1
w
'
2
w
2н
M
'
22
пр
C
прд
M
2
пр
J
1
'
2
пр
J
1н
M
'
22
yn
M
293
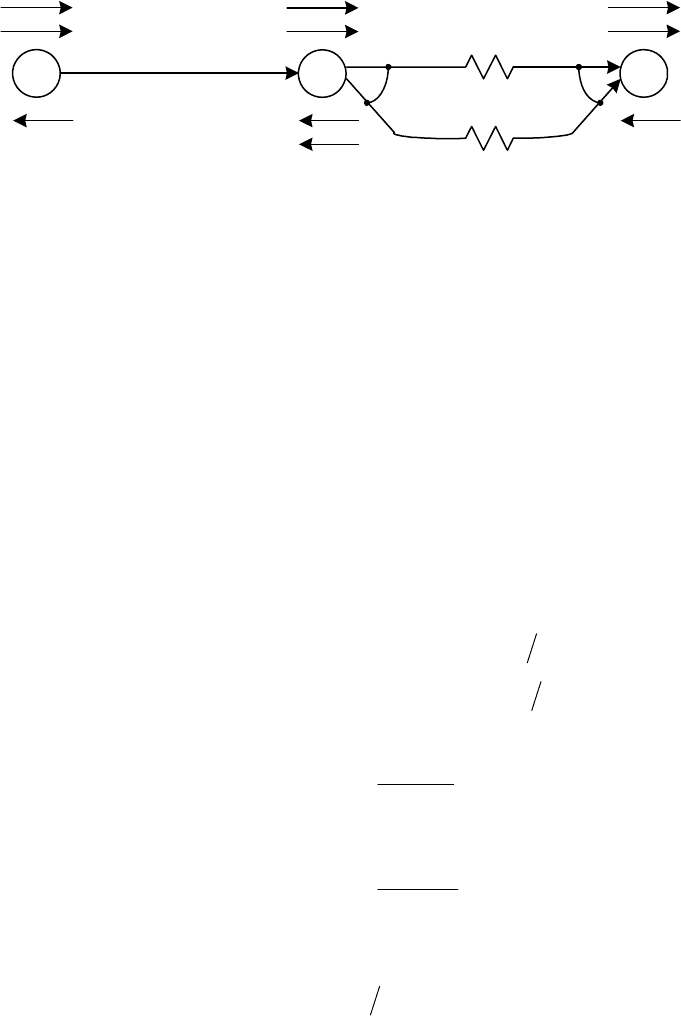
В заключение рассмотрим структуру механического преобразователя с
двумя параллельно соединенными упругими элементами в его
кинематической цепи (рис. 5.53).
Рис. 5.53
Для исходной расчетной модели преобразователя можно записать
систему дифференциальных уравнений в операторной форме записи (при
нулевых начальных условиях) при передаче энергии от двигателя к
исполнительному механизму
,Rv ;i
FFF
vv
p
С
F
vv
p
С
F
RFM
RFM
iМM
vpmFF
pJ)ММ(М
pJМ
М
22321212
2y1y3д
32
)2(23
2у
32
)1(23
1у
23232y)2(2п
23231y)1(2п
12121п2д
33н3д
22)2(2п
)1(2п
2д
111п1д
(5.58)
где R
23
– радиус приведения от вала 2 со скоростью
2
к линейной скорости
v
2
; F
п3
= F
н
– усилие сопротивления нагрузки.
Обозначим С
23(1)
= С
2(1)
, С
23(2)
= С
2(2)
, R
23
= R
2
,
23
=
2
и запишем (5.58) в
виде:
1д
M
1п
M
1
w
2д
M
)1(2п
M
2
w
1212
,
i
3
v
3n
F
)1(23
C
3д
F
1
J
2
J
3
m
)2(2п
M
)2(23
C
294
.pm/FFFv ;Rv
,vv
p
1
CF
,vv
p
1
CF
,r/RFFМM
,I/
,p
JММM
,rI/1МM
),p1J/()MM(
3H2y1y3222
32)2(22y
32)1(21y
222y1y)2(2П)1(2П
1212
22)2(2П)1(2П2Д
12122Д1П
1П1Д1
(5.59)
По уравнениям выражения (5.59) сформирована структурная схема,
изображенная на рис. 5.54. После ряда структурных преобразований имеем
трехмассовую и эквивалентную двухмассовую модели (рис. 5.55). На
структуре рис. 5.55, а обозначено:
;
i
1
K;
i
R
K
12
2
12
2
J
1312
2
н
F
η
η
;
i
R
K;
i
R
K
13
2
12
2
2
C
13
2
12
2
2
3
m
ηη
)2(23)1(2312
CCC
.
Рис. 5.54
Рис. 5.55, а
1
1
J
p
1
pJ
2
pm
3
1
н
F
1
w
1д
M
p
C
)2(23
2
2
R
1212
1
i
12
1
i
2
R
2
w
3
v
2
v
p
C
)1(23
1
1
np
J
p
1
p
1
3
1
np
J
p
1
нnp
M
np
w
3
1
w
1д
M
np
C
у
M
np
B