Тимофеев В.Н. (ред.) Применение магнитогидродинамических устройств в металлургии
Подождите немного. Документ загружается.

275
Для приведения системы к переменной
1
(валу двигателя Д
1
) примем за
входное воздействие М
д1
, а за выходную переменную
1
и представим
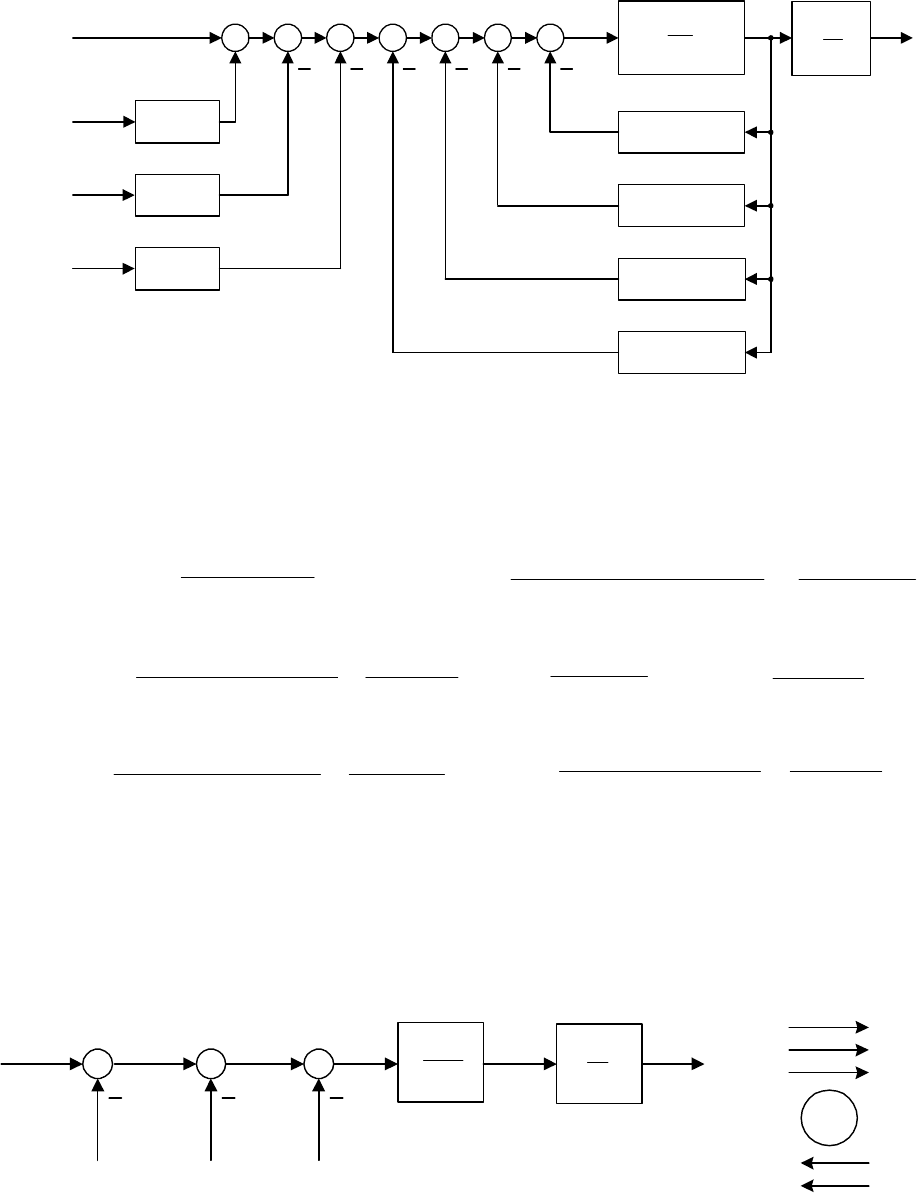
модель (рис. 5.54, а) в виде структурной схемы, показанной на рис. 5.54,б.
а)
1
1
J
p
1
12
1
i
1д
M
1
w
2
w
1212
1
i
2323
1
i
pJ
4
4
w
24
1
i
pJ
2
23
1
i
pJ
3
2424
1
i
3
w
2н
M
1н
M
22
JK
J
p
1
1Mн
K
1н
M
1д
M
1
w
1
1
J
33
JK
J
44
JK
J
2Mн
K
2н
M
276
б)
в)
г)
Рис. 5.38
пр
J
1
p
1
прн
M
2
1д
M
1
w
прн
M
1
1д
M
прн
M
1
1
w
пр
J
прн
M
2
277
На структурной схеме обозначено:
131323231212
1н
M
i
1
ii
1
K
ηηη
;
141424241212
2н
M
i
1
ii
1
K
ηηη
;
12
2
12
2
J
i
1
K
η
;
13
2
13
23
2
23
12
2
12
3
J
i
1
ii
1
K
ηηη
;
14
2
14
24
2
24
12
2
12
4
J
i
1
ii
1
K
ηηη
.
После свертывания замкнутых контуров приходим к одномассовой
эквивалентной модели с приведенными к переменной
1
моментом инерции
J
пр
и воздействиями М
н1пр
и М
н2пр
(рис.5.38, в, г), определяемыми
соотношениями:
44J33J22J1np
JKJKJKJJ
,
1н
1н
Mnp1н
MKM
,
2н
2н
Mnp2н
MKM
.
Аналогично выполняются операции приведения системы к любой
другой ее переменной .
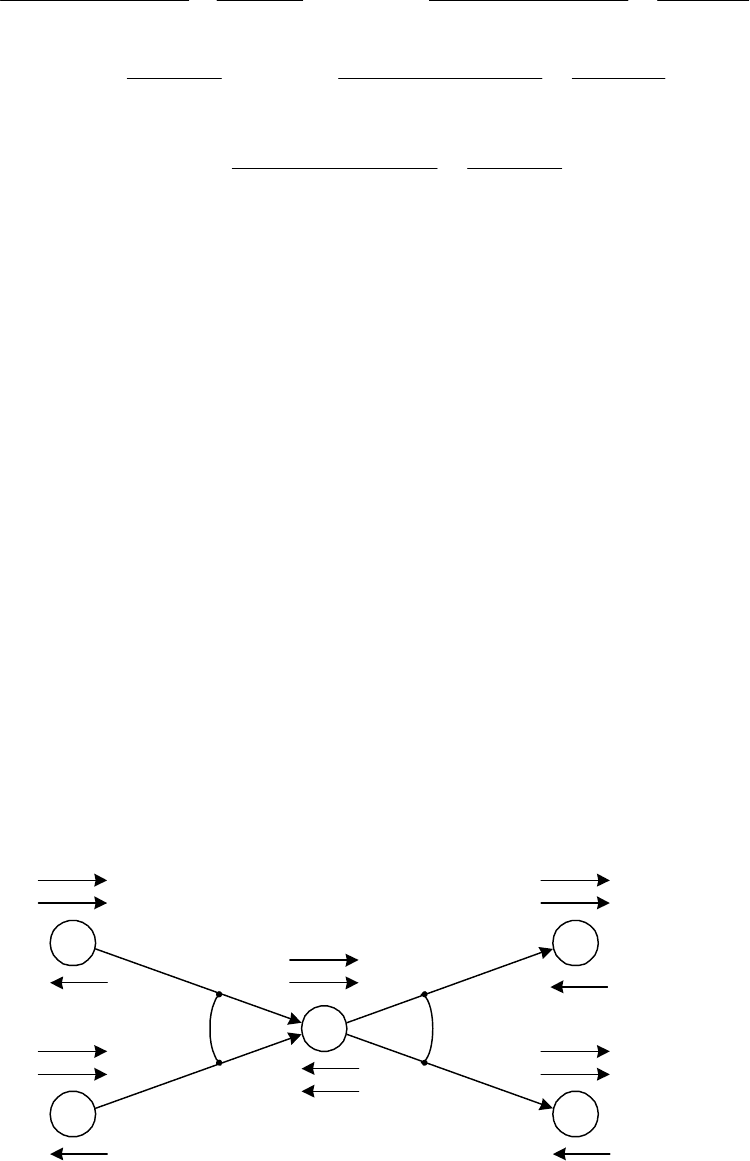
Простейшая кинематическая схема комбинированного электропривода,
представляющего собой пятимассовую взаимосвязанную механическую систему с
жесткими линейными механическими связями, изображена на рис. 5.39. Составим систему
дифференциальных уравнений движения механического преобразователя
рассматриваемого электропривода при передаче энергии от двух двигателей к
исполнительным органам двух рабочих машин
Рис. 5.39
3д
M
34п
M
3
w
4д
M
1н
M
4
w
2323
,
i
3
J
4
J
1д
M
13п
M
1
w
1
J
1313
,
i
5д
M
2н
M
5
w
5
J
3535
,
i
35п
M
2д
M
23п
M
2
w
2
J
3434
,
i

278
353535n5д
343434n4д
232323n131313n3д
5
52н5д
4
41н4д
3
335n34n3д
2
223п2д
1
113п1д
iMМ
iMМ
iMiMМ
dt
d
JMМ
dt
d
JMМ
dt
d
JMMМ
dt
d
JMM
dt
d
JMM
(5.49)
где
3
=
1
/ i
13
,
2
= i
23
3
,
4
=
3
/ i
34
,
5
=
3
/ i
35
.
Воспользовавшись операторной формой записи уравнений, получим:
.i
,i
,i
,i
,pJMiM
,pJMiM
,pJMMiMiM
,pJMM
,pJMM
3535
3434
3232
1313
552н353535n
441н343434n
3335n34n232323n131313n
2223п2д
1113п1д
(5.50)
Представив уравнения выражения (5.50) в виде
279
,i/ww
,
i
MpJ
M
,i/
,
i
MpJ
M
,i
,pJMM
,i/
,
i
iMMMpJ
M
,
pJ
MM
3535
3535
2н55
35n
3434
3434
1н44
34n
3232
222д23n
1313
1313
232323n35n34n33
13n
1
13n1д
1
(5.51)
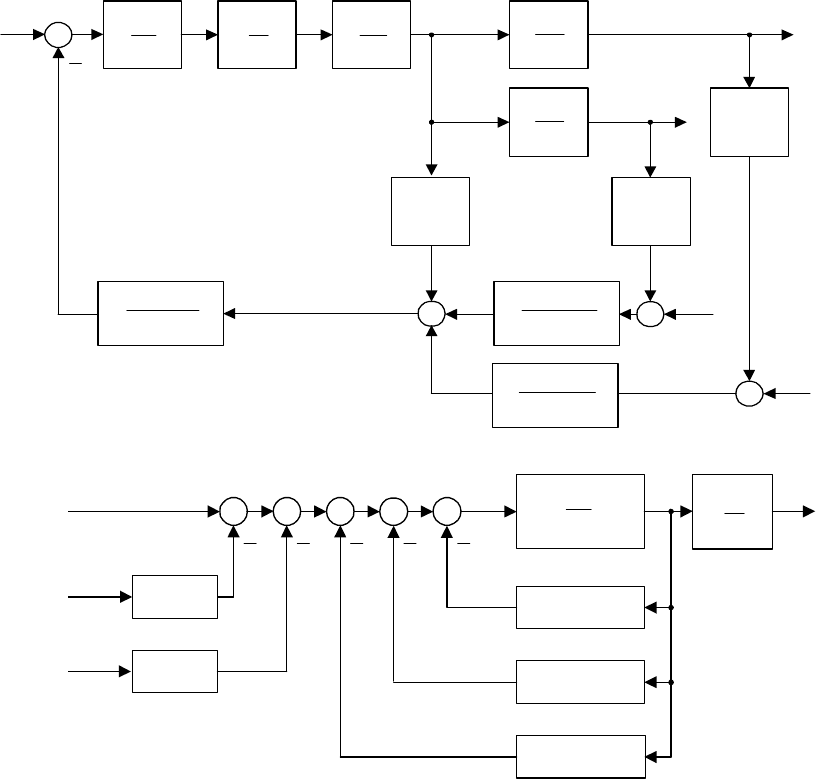
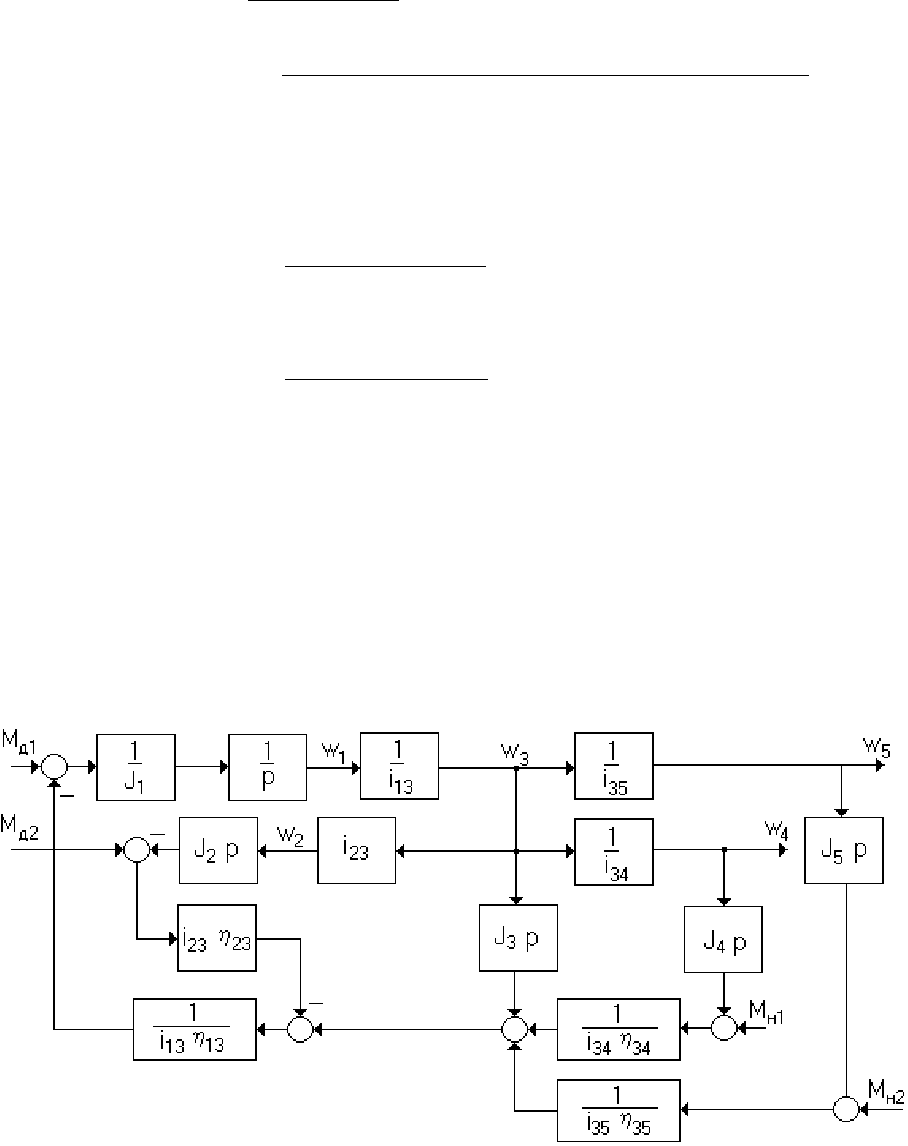
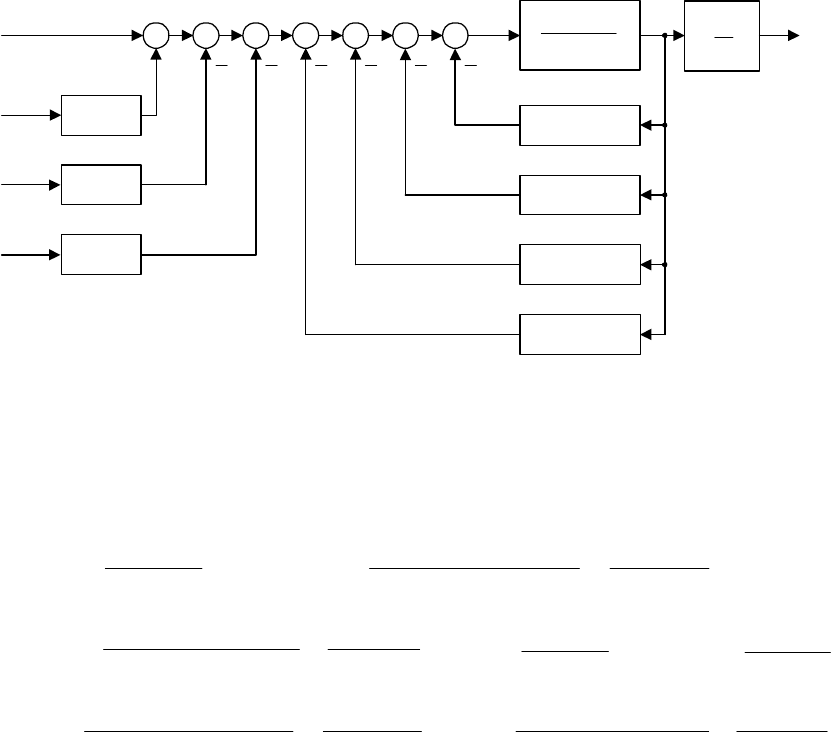
сформируем структурную схему пятимассовой взаимосвязанной
механической системы (рис. 5.40, а). Для приведения системы к переменной
1
необходимо принять М
д1
за входное воздействие, а
1
за выходную
переменную системы. В этом случае исходную развернутую структуру (рис.
5.40, а) можно представить в виде структурной схемы, изображенной на рис.
5.40, б.
Рис. 5.40, а
280
Рис. 5.40, б
На этой схеме обозначено:
1
i
i
KM
1313
2323
2д
;
141434341313
1н
M
i
1
ii
1
K
;
151535351313
2н
M
i
1
ii
1
K
ηηη
;
1
i
i
K
13
2
13
23
2
23
2
J
η
η
;
13
2
13
3
J
i
1
K
η
;
14
2
14
34
2
34
13
2
13
4
J
i
1
ii
1
K
ηηη
;
15
2
1535
2
3513
2
13
5
J
i
1
ii
1
K
ηηη
.
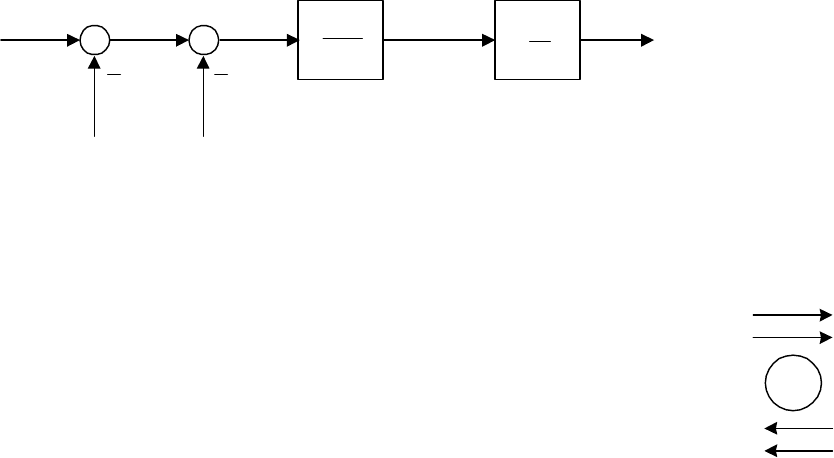
После структурных преобразований имеем эквивалентную
одномассовую модель (рис. 5.41) рассматриваемой системы с приведенными
к переменной
1
параметрами и воздействиями:
а) б)
Рис. 5.41
1д
M
прн
M
1
1
w
пр
J
прн
M
2
прд
M
2
22
JK
J
p
1
2Mд
K
2д
M
1д
M
1
w
1
1
J
33
JK
J
44
JK
J
1Mн
K
1н
M
55
JK
J
2Mн
K
2н
M
пр
J
1
p
1
прн
M
2
1
w
прн
M
1
1д
M
прд
M
2
281
55J44J33J22J1np
JKJKJKJKJJ
,
2д
2д
Mnp2д
MKM ,
1н
1н
Mnp1н
MKM
,
2н
2н
Mnp2н
MKM
.
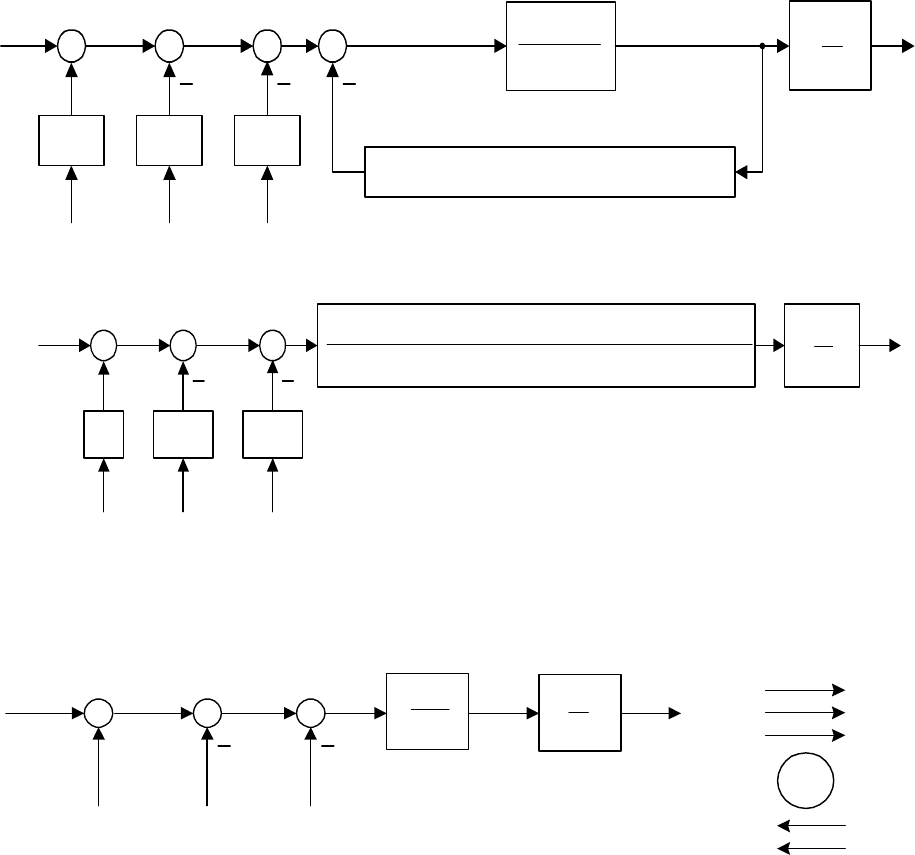
Выполним операцию приведения системы к переменной
2
(валу
двигателя Д
2
). Приняв за входное воздействие М
д2
, а за выходную
переменную
2
, представим исходную структуру (рис.5.40, а) в виде модели,
показанной на рис. 5.42.
Рис. 5.42
На модели обозначено:
1
i
i
K
2323
1313
1д
M
η
η
;
242434342323
1н
M
i
1
ii
1
K
ηηη
;
252535352323
2н
M
i
1
ii
1
K
ηηη
;
1
i
i
K
23
2
23
13
2
13
1
J
η
η
;
23
2
23
3
J
i
1
K
η
;
24
2
2434
2
3423
2
23
4
J
i
1
ii
1
K
ηηη
;
25
2
2535
2
3523
2
23
5
J
i
1
ii
1
K
ηηη
.
На рис. 5.43 отражены этапы получения одномассовой эквивалентной
модели (рис.5.43, в) рассматриваемого преобразователя.
2
J
p
1
1Mд
K
1д
M
2д
M
2
w
11
1
JK
J
33
JK
J
44
JK
J
1Mн
K
1н
M
55
JK
J
2Mн
K
2н
M
282
а)
б)
в) г)
Рис. 5.43
На основании этих моделей можно записать:
55J44J33J211Jnp
JKJKJKJJKJ
,
1д
1д
Mnp1д
MKM
,
1н
1н
Mnp1н
MKM
,
2н
2н
Mnp2н
MKM
.
5.4. Преобразователи с упругими связями
5544332
JKJKJKJ
JJJ
p
1
1Mд
K
2д
M
1д
M
2
w
11
1
JK
J
1Mн
K
1н
M
2Mн
K
2н
M
p
1
1
2д
M
1д
M
2
w
554433211
1
JKJKJKJJK
JJJJ
1Mн
K
1н
M
2Mн
K
2н
M
пр
J
1
p
1
прн
M
2
2
w
прн
M
1
2д
M
прд
M
1
2д
M
прн
M
1
1
w
пр
J
прн
M
2
прд
M
1
283
В реальных системах электропривода представление о жесткой связи
вала двигателя с механизмом является допущением, которое в ряде случаев
оказывается неприемлемым. Практически любая механическая связь
двигателя с исполнительным органом рабочей машины не является
абсолютно жесткой и возможность пренебрежения явлением упругости
обычно связана с тем, что собственная частота упругих колебаний системы
двигатель
– исполнительный механизм оказывается значительно большей
частот, существенных для системы автоматического управления
электроприводом. Поэтому возможность повышения быстродействия
системы электропривода, обусловленную применением статических
преобразователей, часто не удается реализовать на практике из-за влияния
упругости элементов механической цепи на процесс регулирования.
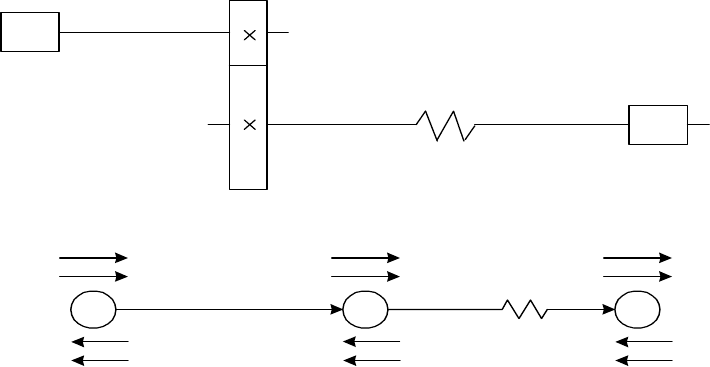
Рассмотрим последовательное соединение звеньев трехмассовой
механической передачи с одной упругой связью (рис. 5.44,
а). При анализе
таких систем обычно делают следующие допущения: силы и моменты,
действующие в системе, приложены к сосредоточенным массам, которые не
подвергаются деформациям; упругие звенья невесомы и характеризуются
постоянной жесткостью, т.е. коэффициентом пропорциональности между
моментом (силой) и деформацией; деформация упругих звеньев линейна и
подчиняется закону Гука; волновое движение деформации не
учитывается.
Тогда, с учетом изложенного, кинематическая схема рассматриваемого
преобразователя может быть представлена в виде исходной расчетной
модели, изображенной на рис. 5.44, б.
а)
б)
Рис. 5.44
1д
M
1
J,
1
w
2
J,
2
w
Д
1212
, i
1
2
РМ
3
J
н
M
,
3
w
3c
M
12n
M
1c
M
2д
M
23уп
M
3уд
M
2c
M
2323
, BC
3
1д
M
12п
M
1
w
2д
M
23уп
M
2
w
1212
,
i
3
w
н
M
2323
, BC
3уд
M
1
J
2
J
3
J
1c
M
2c
M
3c
M
284
На основе этой модели дифференциальные уравнения системы при
передаче энергии от двигателя к рабочей машине могут быть записаны в
виде:
,i
,aМ
,dtCМM
,
dt
d
JМMM
,aМ
,BdtCММM
,iMМ
,
dt
d
JМMМ
,a
М
,
dt
d
JМMM
1212
333с
32231у3yд
3
33сн23уд
222с
322332232у1у23yn
121212n2д
2
22с23yn2д
111с
1
11с12n1д
(5.52)
где а
1
, а
2
, а
3
– коэффициенты внешнего вязкого трения на соответствующих
массах; С
23
, В
23
– коэффициенты жесткости и внутреннего трения упругой
механической связи. Исключая М
с1
, М
с2
, М
с3
и М
д2
, выражение (5.52)
запишем в операторной форме при нулевых начальных условиях
.i
,
p
C
M
,pJaMM
,B
p
C
M
,pJaMiM
,pJaMM
1212
32
23
3yд
3333н23уд
3223
23
23yn
222223yn121212n
111112n1д
(5.54)