Тимофеев В.Н. (ред.) Применение магнитогидродинамических устройств в металлургии
Подождите немного. Документ загружается.

255
в)
г)
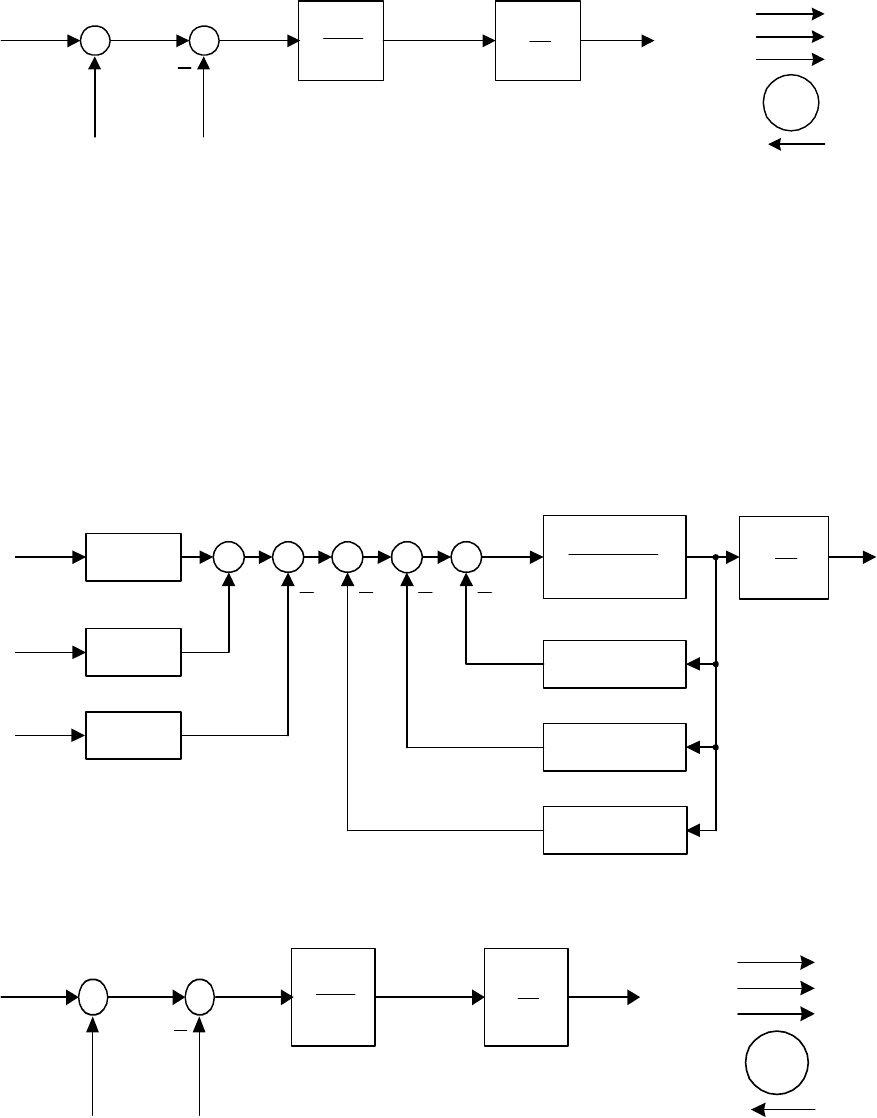
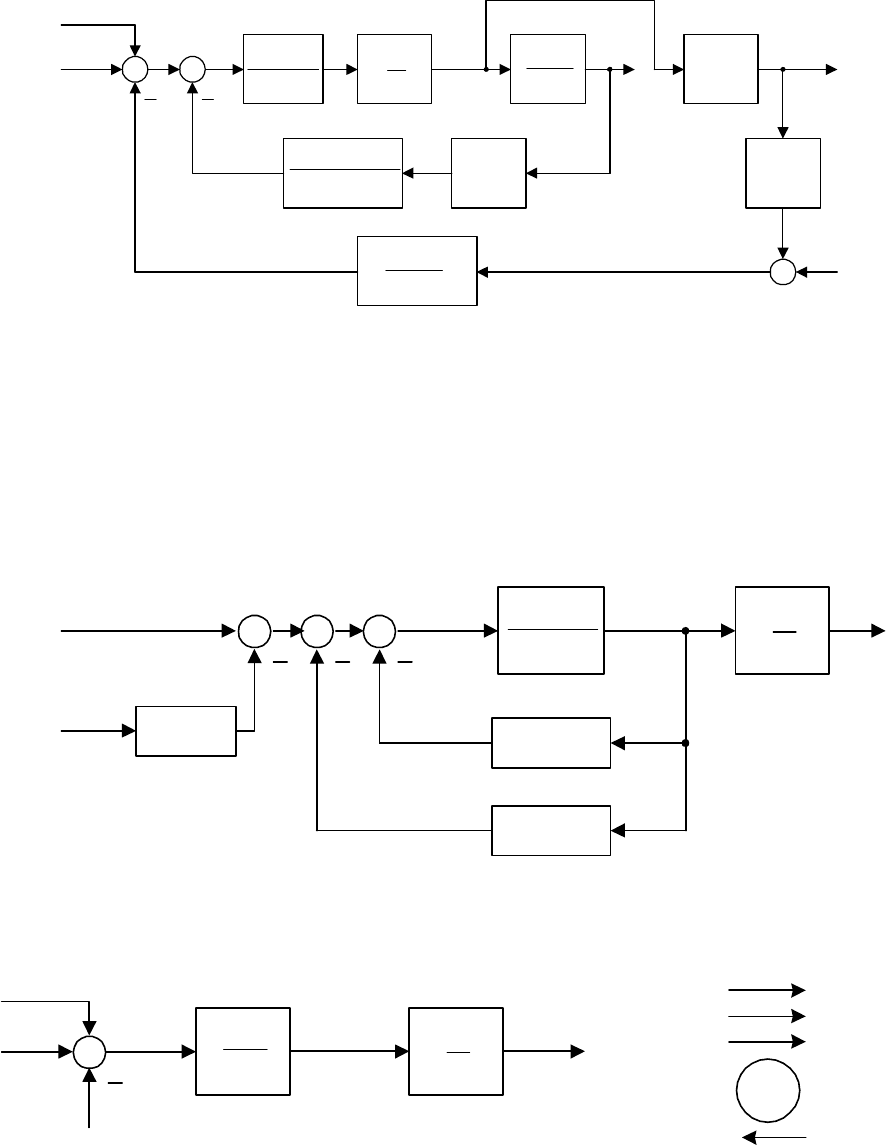
Рис. 5.26
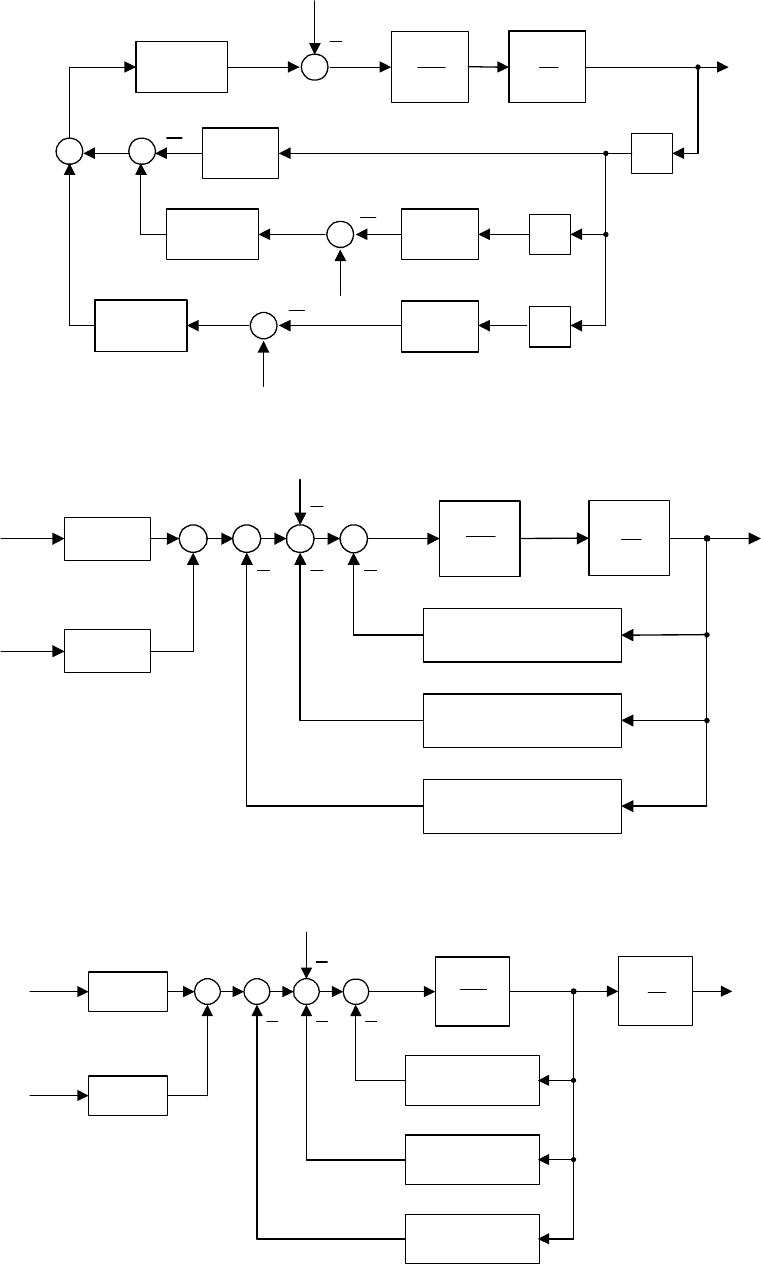
Если принять за входное воздействие М
д2
, а за выходную переменную
2
, то после преобразований, аналогичных предыдущим, получим
детализированную структурную схему и её эквивалентную одномассовую
модель (рис. 5.27).
а)
б)
в)
Рис. 5.27
пр
J
1
p
1
нпр
M
1д
M
1
w
прд
M
2
1д
M
нпр
M
1
w
пр
J
прд
M
2
22
JK
J
p
1
2Mд
K
2д
M
1д
M
2
w
11
1
JK
J
33
JK
J
44
JK
J
Mн
K
нпр
M
1Mд
K
2д
M
нпр
M
2
w
пр
J
прд
M
1
пр
J
1
p
1
нп
р
M
2д
M
2
w
прд
M
1
256
На рис. 5.27 обозначено:
23
13
2323
1313
1д
M
i
i
K
η
η
η
η
, 1K
2д
M
,
242434342323
н
M
i
1
ii
1
K
ηηη
,
23
13
23
2
23
13
2
13
1
J
i
1
iK
η
η
η
η
, 1K
2
J
,
23
2
23
3
J
i
1
K
η
,
24
2
2434
2
3423
2
23
4
J
i
1
ii
1
K
ηηη
,
44J33J22J11Jnp
JKJKJKJKJ
,
1д
1д
Mnp1д
MKM
,
1н
1н
Mнnp
MKM
.
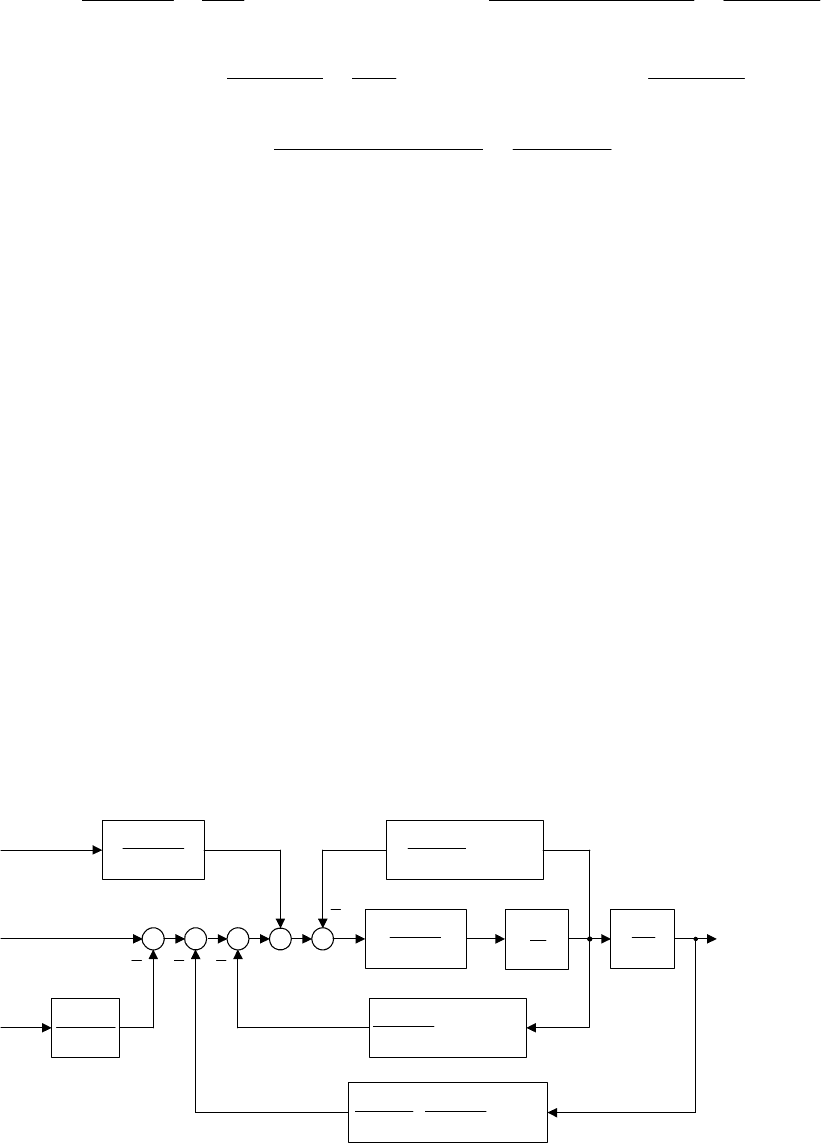
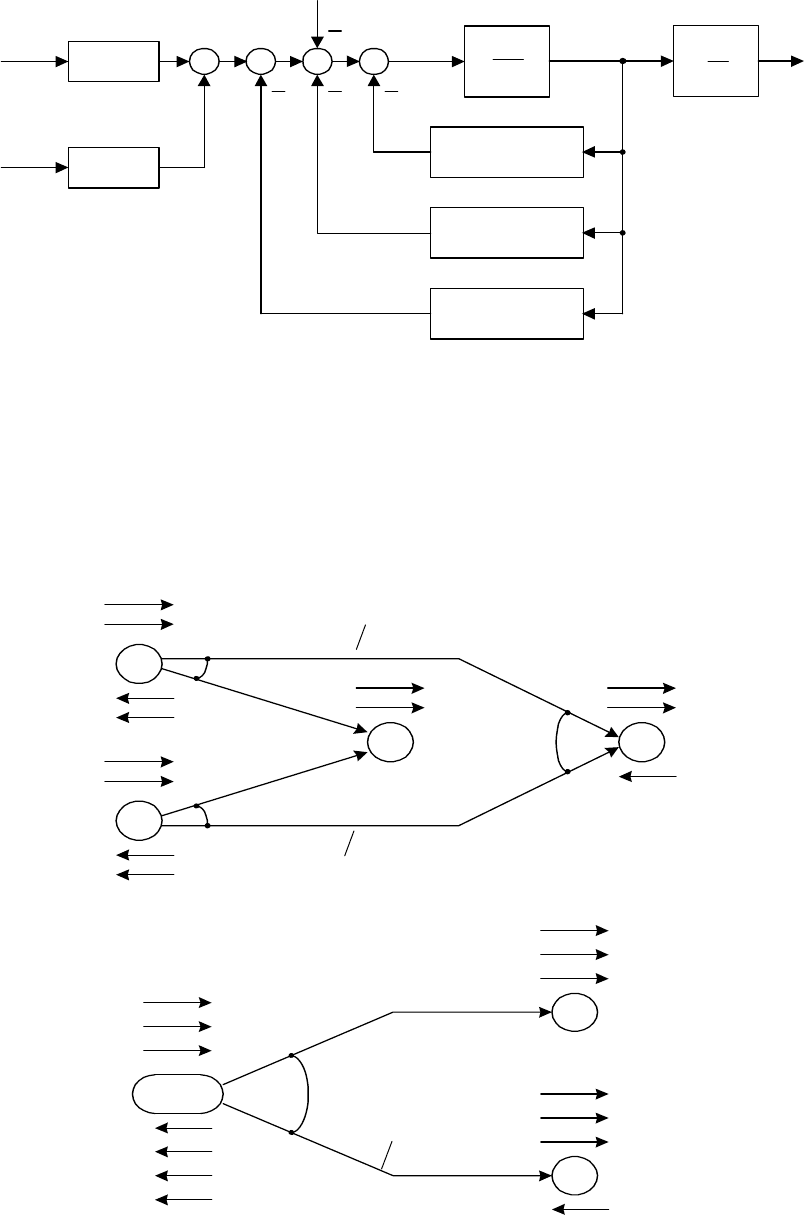
При параметрическом синтезе регуляторов системы управления
многодвигательного электропривода целесообразно приведение его
механической части к выходному валу (
4
) механического преобразователя.
Последовательное преобразование (рис. 5.28) исходной модели (рис. 5.25, а)
позволяет получить выражения
433J22J11Jnp
JJKJKJKJ
;
1д
1д
Mnp1д
MKM
,
2д2Mдnp2д
MKM
,
соответствующие одномассовой эквивалентной модели (рис. 5.28, д), где
К
Мд1
= i
14
·
14
; К
Мд2
= i
24
·
24
; К
J1
= i
2
14
·
14
; К
J2
= i
2
24
·
24
; К
J3
= i
2
34
·
34
; К
J4
=
1 – коэффициенты приведения к переменной
4
момента инерции и
вращающих моментов двигателей.
Рис. 5.28, а
232
1313
2323
ipJ
i
i
p
1
2д
M
1д
M
4
w
113
1
Ji
н
M
pJ
ii
4
34341313
11
pJ
i
3
1313
1
34
1
i
1414
1
i
1313
2323
i
i
257
Рис. 5.28, б
Рис. 5.28, в
Рис. 5.28, г
34232
1313
2323
iipJ
i
i
p
1
2д
M
1д
M
4
w
114
1
Ji
н
M
pJ
i
4
1414
1
343
1313
1
ipJ
i
1414
1
i
1313
2323
i
i
23423
1313
2323
Jii
i
i
p
1
2д
M
1д
M
4
w
114
1
Ji
н
M
4
1414
1
J
i
343
1313
1
iJ
i
1414
1
i
1313
2323
i
i
22
JK
J
p
1
2Mд
K
2д
M
1д
M
4
w
11
1
JK
J
33
JK
J
4
J
н
M
1Mд
K
258
д) е)
Рис.5.28
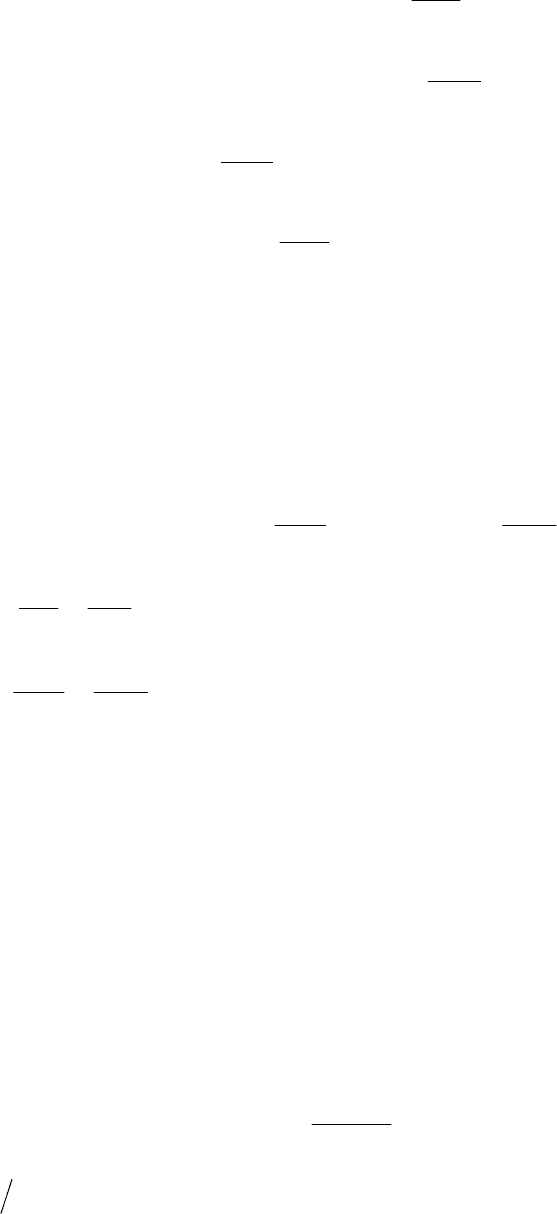
Аналогичный результат может быть получен из системы уравнений
(5.31) после представления ее в виде:
.i
,pJММ
,i
,pJММ
,i
,pJiМiММ
,
pJ
МiМ
1331
111д1п
3232
222д2п
3443
3323232п13131п3п
4
н34343п
4
(5.33)
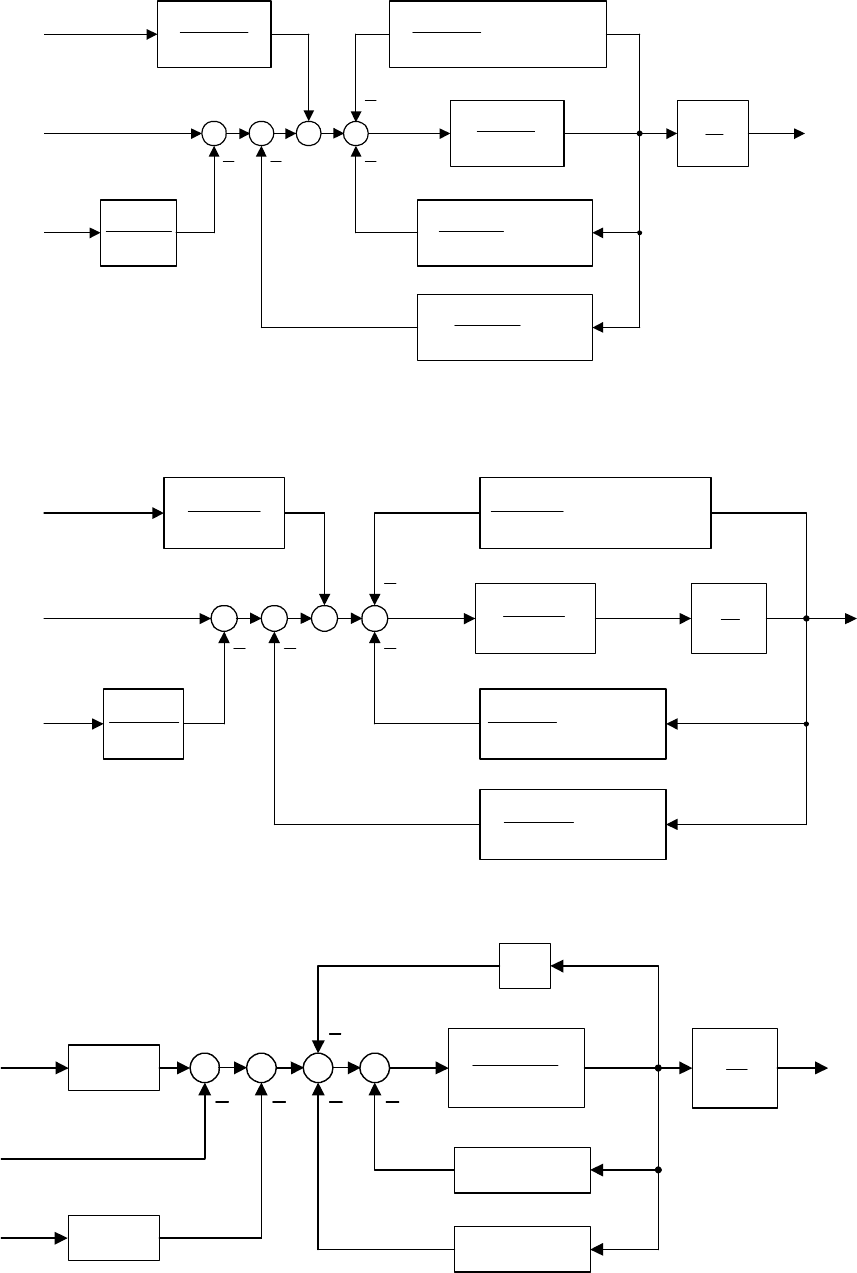
Структурная схема, соответствующая этим уравнениям, показана на рис.
5.29, эквивалентные преобразования этой схемы приводят к структуре рис.
5.29, г, аналогичной ранее полученной (рис. 5.26, г).
На схеме рис. 5.29, г обозначено
К
Мд1
= i
14
14
;
К
Мд2
= i
24
24
;
К
J1
= i
2
14
14
;
К
J2
= i
2
24
24
;
К
J3
= i
2
34
34
.
пр
J
1
p
1
н
M
прд
M
1
4
w
прд
M
2
прд
M
2
н
M
4
w
пр
J
прд
M
1
259
Рис. 5.29, а
Рис. 5.29, б
Рис. 5.29, в
4
1
J
p
1
1д
M
3
w
1313
i
3434
i
4
w
23
i
pJ
2
pJ
3
2д
M
2323
i
н
M
2
w
34
i
13
ipJ
1
1
w
2п
M
1п
M
3п
M
p
1
2д
M
1д
M
4
w
4
1
J
н
M
pJi
114
2
14
pJi
334
2
34
1414
i
pJi
224
2
24
2424
i
p
1
2д
M
1д
M
4
w
4
1
J
н
M
114
2
14
Ji
334
2
34
Ji
1414
i
224
2
24
Ji
2424
i
260
Рис. 5.29, г
Рассмотрим структуру преобразователя двухдвигательного
электропривода с параллельными механическими цепями в его
кинематической цепи. Составим исходную расчетную модель (рис. 5.30, а) и
запишем дифференциальные уравнения движения валов преобразователя.
а)
б)
Рис. 5.30
p
1
2д
M
1д
M
4
w
4
1
J
н
M
11
JK
J
33
JK
J
1M
K
22
JK
J
2M
K
2д
M
2п
M
2
w
3д
M
3
w
2323
,
i
2
J
3
J
1д
M
1п
M
1
w
1
J
1313
,
i
4д
F
н
F
4
v
4
m
1414
,1
R
14п
M
24п
M
2424
,1
R
2д
M
2п
M
31д
M
3
w
3
J
1д
M
1п
M
)2(1
w
21
JJ
3)2(13)2(1
,
i
41д
F
н
F
4
v
4
m
4)2(14)2(1
,1
R
14п
M
24п
M
42д
F
32д
M
261
dt
dv
mFF
,
dt
d
JМ
,
dt
d
J)ММ(М
,
dt
d
J)ММ(М
4
4н4д
3
33д
2
224п2п2д
1
114п1п1д
(5.34)
а также уравнения связи движущих и противодействующих моментов и
соотношения скоростей для случая передачи энергии от двигателя к
исполнительному механизму
.
R
w
R
w
v
,
i
w
i
w
w
,
R
1
М
R
1
МFFF
,iМiММ
24
2
14
1
4
23
2
13
1
3
24
24
24п14
14
14п42д41д4д
23232п13131п3д
ηη
ηη
(5.35)
Предполагая
13
=
23
и
14
=
24
, а также учитывая, что в
рассматриваемой структуре i
13
= i
23
и R
14
= R
24
, представим предыдущие
выражения с использованием операторной формы записи в виде
4)2(1)3(24)3(121)3(2
4)2(1
4)2(1
24п14п42д41д4д
3)2(13)2(12п1п32д31д3д
44н4д333д
)2(12124п2п14п1п2д1д
Rv,i
,
R
1
ММFFF
,i)ММ(МММ
,vpmFF,pJМ
,p)JJ(ММММММ
(5.36)
262
или иначе
,Rv
,i
,vpm
F
R
1
)ММ(
,pJ
i)ММ(
,p)JJ(
)ММ()ММ(ММ
4)2(1)3(24
)3(121)3(2
44
н4)2(1
4)2(1
24п14п
33
3)2(13)2(12п1п
)2(121
24п2п14п1п2д1д
(5.37)
где R
14
, R
24
– радиусы приведения от валов 1 и 2 со скоростями
1
и
2
соответственно к линейной скорости v
4
.
Выражению (5.37) соответствует преобразованная расчетная схема
преобразователя, представленная на рис. 5.30, б.
После представления уравнений (5.37) в виде
4)2(1)2(14
3)2(1
1
3
4)2(1
4)2(1н44
24п2п
3)2(13)2(1
33
14п1п
21
24п2п14п1п2д1д
)2(1
Rv
,
i
,
RFvpm
)ММ(
,
i
pJ
)ММ(
,
p)JJ(
)ММ()ММ(ММ
(5.38)
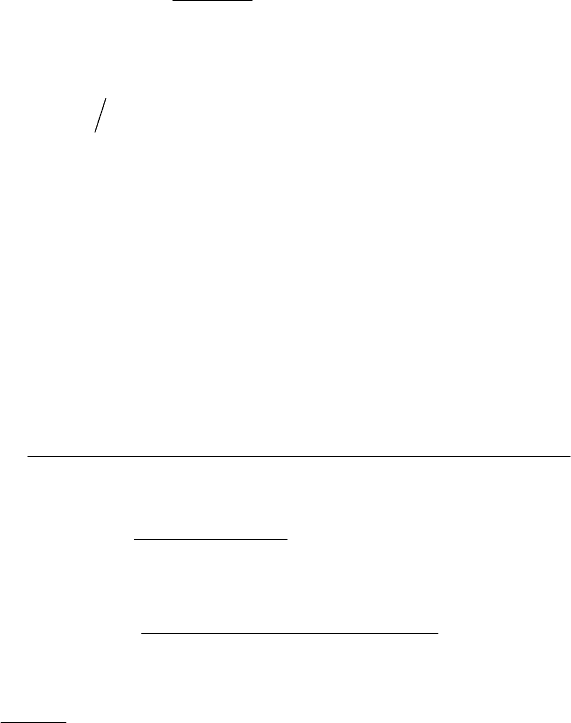
может быть сформирована (рис. 5.31) развернутая структурная схема
преобразователя при прямом направлении передачи энергии.
263
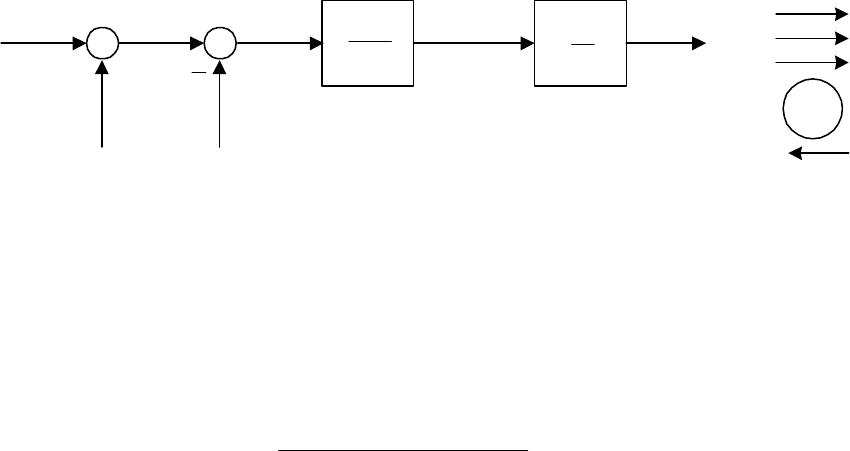
Рис. 5.31.
Если принять за входное воздействие вращающий момент двигателя
М
д1
, а за выходную переменную его частоту вращения
1
, то структурную
схему рис. 5.31 можно представить в виде нормализованной развернутой
трехмассовой и эквивалентной одномассовой модели (рис. 5.32).
а)
б) в)
Рис. 5.32
21
1
JJ
p
1
3)2(13)2(1
1
i
2д
M
1д
M
)2(1
w
3)2(1
1
i
pJ
3
3
w
4)2(1
R
4)2(1
4)2(1
R
pm
4
4
v
н
F
33
JK
J
p
1
Fн
K
2д
M
1д
M
1
w
21
1
JJ
н
F
44
mK
m
1д
M
нпр
M
1
w
пр
J
2д
M
пр
J
1
p
1
нпр
M
1д
M
1
w
2д
M
264
Параметры модели могут быть определены из соотношений:
J
пр
= (J
1
+ J
2
) + К
J3
·J
3
+ К
m4
·m
4
;
M
нпр
= К
Fн
·F
н
.
При этом выражения коэффициентов приведения имеют вид:
4)2(1
4)2(1
Fн
R
K
η
,
1KK
2J1J
,
13
2
13
3J
i
1
K
η
,
4)2(1
2
4)2(1
4m
R
K
η
.
Аналогичным образом может быть выполнено приведение
рассматриваемой структуры к любой другой переменной системы.
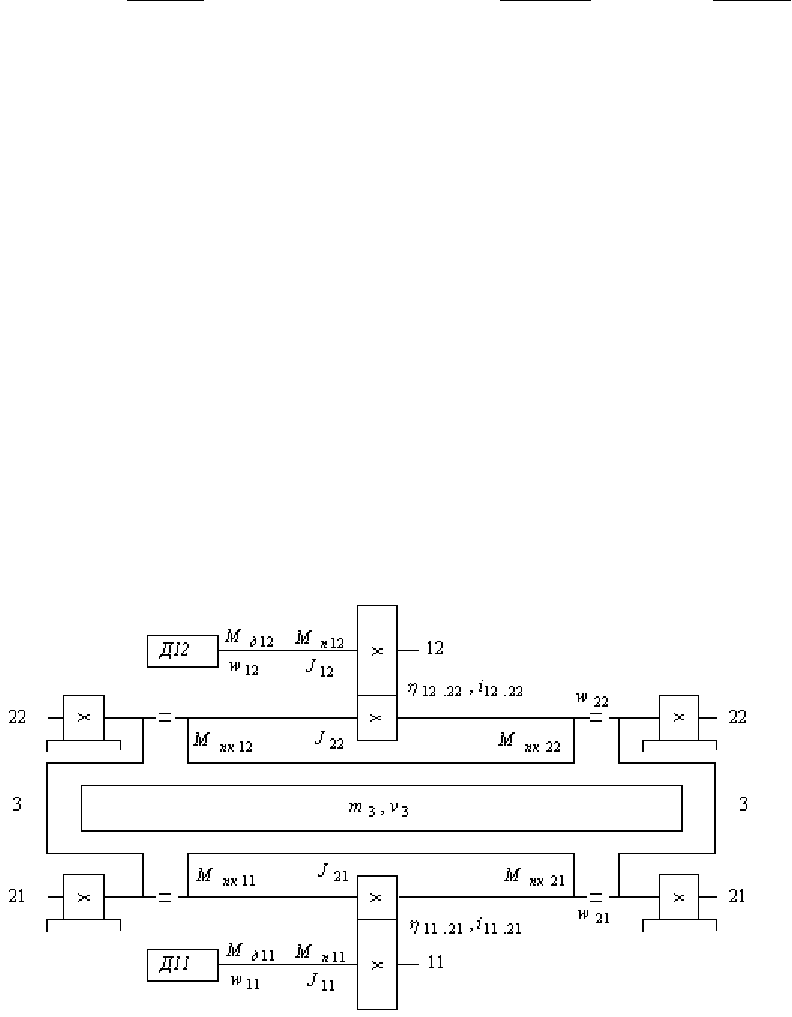
Остановимся на рассмотрении кинематической схемы
двухдвигательного электропривода механизма передвижения транспортной
тележки (рис. 5.33), отличающегося от ранее рассмотренного
однодвигательного (рис. 5.20) наличием двух пар приводных ходовых колес.
Модель механической части данного электропривода представлена
пятимассовой исходной расчетной схемой, изображенной
на рис. 5.33, б. На
модели обозначено: J
11
, J
12
, J
21
, J
22
, m
3
– соответственно моменты инерции
первых (входных) валов, приводных первой и второй колесных пар и масса
поступательно движущихся частей. Исходными уравнениями расчетной
схемы являются: дифференциальные уравнения движения масс, уравнения
связи движущих и противодействующих статических моментов на каждой
вращающейся оси, а также уравнения соотношения скоростей вращающихся
масс модели.
Рис. 5.33, а