Тимофеев В.Н. (ред.) Применение магнитогидродинамических устройств в металлургии
Подождите немного. Документ загружается.

235
Рис. 5.12, б
Выполнив эквивалентные преобразования последней структуры,
приходим к одномассовой эквивалентной модели (рис. 5.13) c приведенными
моментом инерции J
пр
и воздействием М
нпр
.M
i
MKM
J
i
J
i
JJKJKJJ
н
13
13
н
н
Mнпp
3
2
13
13
2
2
12
12
133J22J1пp
а) б)
Рис. 5.13
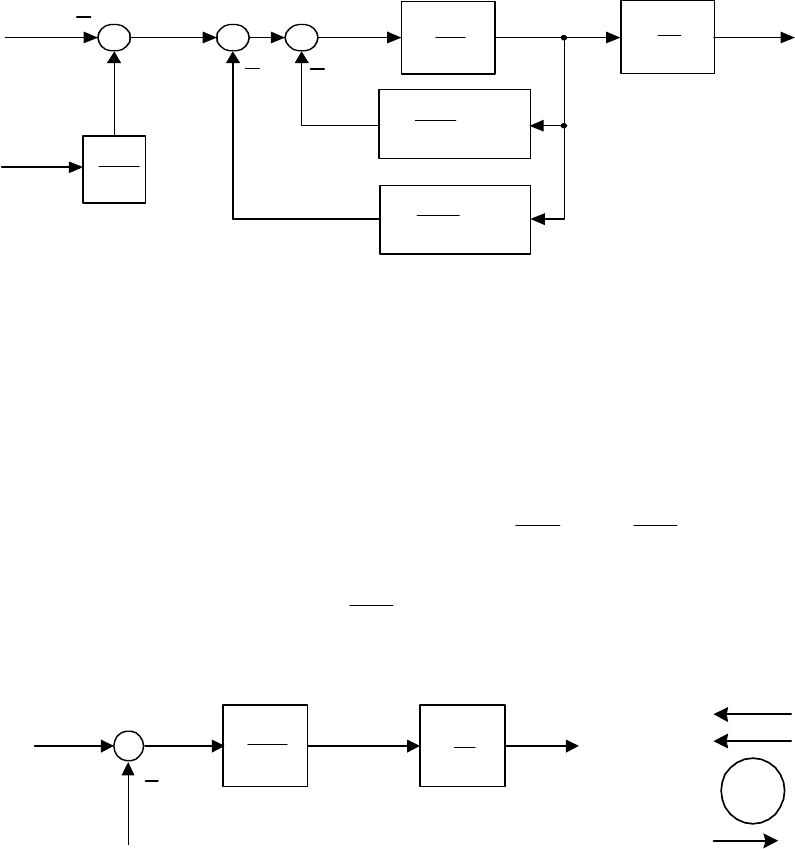
Для приведения системы к переменной
3
следует принять за входное
воздействие М
н
, а за выходную
3
(скорость рабочей машины). После ряда
структурных преобразований (рис. 5.14 а, б,)схему рис. 5.11 представим в
виде трехмассовой модели (рис. 5.14, в), приведенной к переменной
3
, из
которой и определятся искомые коэффициенты приведения:
2
2
12
12
J
i
1
1
J
p
1
13
13
i
н
M
1п
M
1
w
3
2
13
13
J
i
пр
J
1
p
1
нпр
M
1п
M
1
w
нпр
M
1п
M
1
w
пр
J
236
13
13
2312
2312
1
M
iii
K
ηηη
,
13
2
13
2312
2
23
2
12
1
J
iii
K
η
ηη
,
23
2
23
2J
i
K
η
,
1K
3J
.
Рис. 5.14, а
Рис. 5.14, б
Рис. 5.14, в
2
23
2
23
J
i
1
13
2
13
1
J
i
p
1
13
13
i
1д
M
н
M
3
w
3
J
1
1
J
p
1
12
1
i
н
M
1д
M
1
w
2
w
12
12
i
pJ
2
13
13
i
23
1
i
pJ
3
3
w
13
13
i
23
i
1
1
J
p
1
13
1
i
н
M
1д
M
1
w
2
w
12
12
i
pJ
2
13
13
i
pJ
3
3
w
13
13
i
23
i
13
13
i
13
13
i
237
Структуру рис. 5.14, в можно представить в виде одномассовой
эквивалентной модели (рис. 5.15). Значения приведенных момента инерции и
воздействия М
1пр
модели определяются соотношениями:
32
23
2
23
1
13
2
13
322J1
1
Jпp
JJ
i
J
i
JJKJKJ
,
1д
13
13
1д1Mпр1д
M
i
MKM
η
.
а) б)
Рис. 5.15
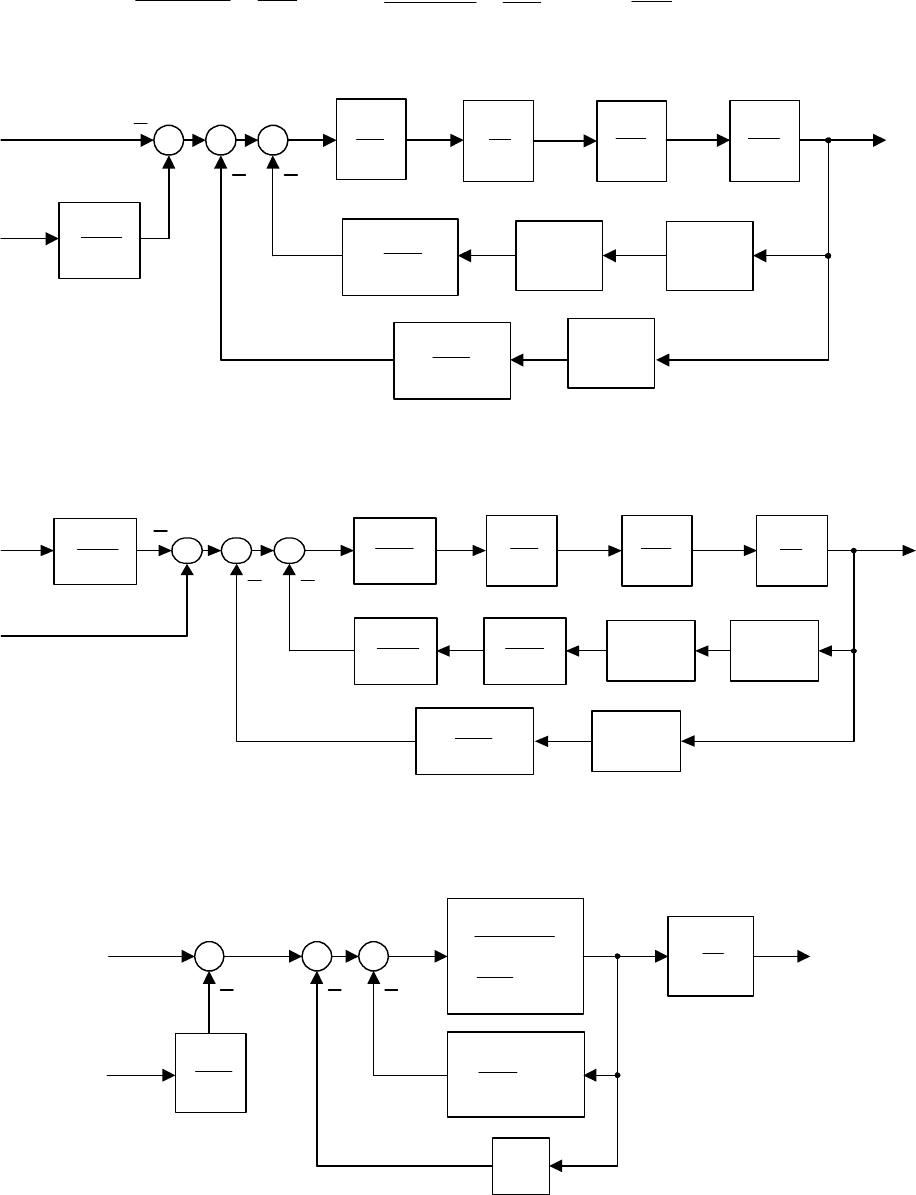
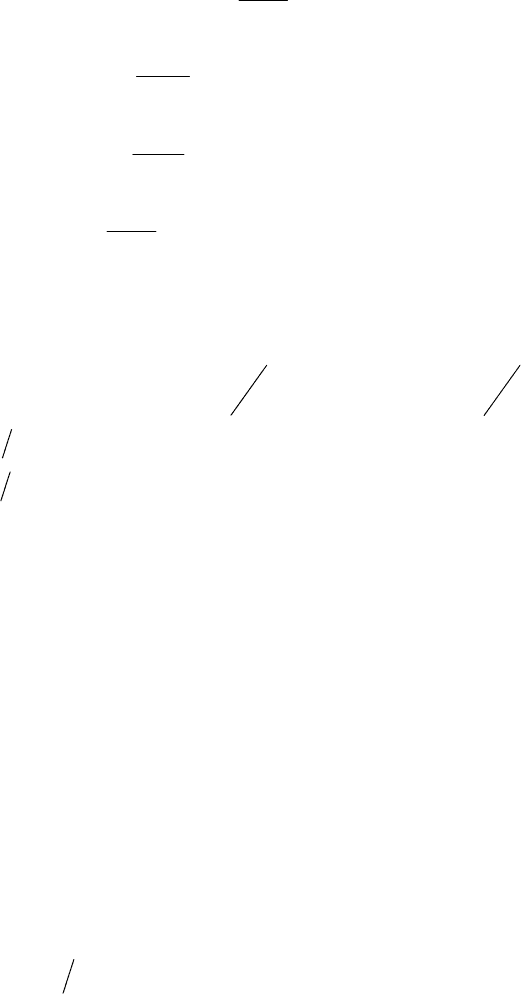
При наличии n-вращающихся масс базовая структурная схема рис. 5.6 при прямом
направлении преобразования энергии представляется в виде приведенной к переменной
1
обобщенной детализированной структурной схемы, показанной на рис. 5.16.
Рис. 5.16
2
12
2
12
1
J
i
1
1
J
p
1
nn
i
11
1
n
M
1д
M
1
w
n
nn
J
i
1
2
1
1
пр
J
1
p
1
прд
M
1
н
M
3
w
н
M
прд
M
1
3
w
пр
J
238
Легко показать, что значения приведенных момента инерции системы и
момента сопротивления в этом общем случае будут определяться
выражениями (при последовательном соединении звеньев):
.
i
1
MM
,J
i
1
...J
i
1
J
i
1
JJ
n1n1
nnp
n
n1
2
n1
3
13
2
13
2
12
2
12
1np
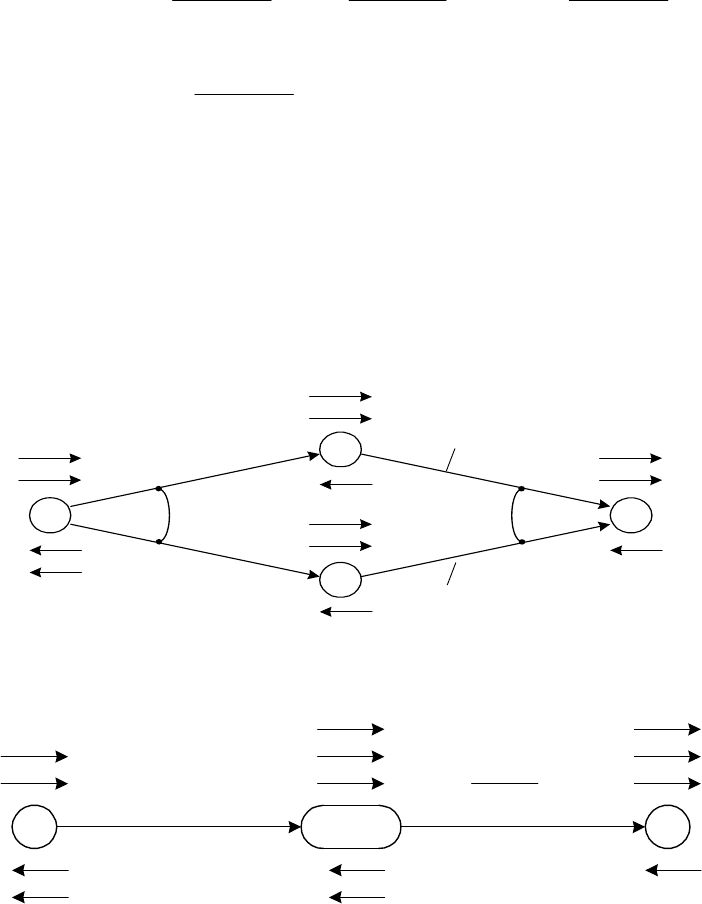
В системах однодвигательного электропривода находят применение
МП с параллельными ветвями в кинематической цепи. Структура
преобразователя, показанная на рис. 5.17, а, характерна для нажимных
винтов прокатных станов. Для синтеза эквивалентной одномассовой модели
такого преобразователя воспользуемся исходной расчетной динамической
моделью.
а)
б)
Рис. 5.17
1д
M
12п
M
1
w
2д
M
24п
M
2
w
1212
,
i
4
v
4п
F
3434
,1
R
4д
F
1
J
2
J
4
m
3д
M
34п
M
3
w
3
J
1313
,
i
13п
M
2424
,1
R
1д
M
12п
M
1
w
2д
M
24п
M
)3(2
w
)3(12)3(12
,
i
3
v
4п
F
4)3(2
4)3(2
,
1
R
41д
F
1
J
32
JJ
4
m
13п
M
34п
M
3д
M
42д
F
239
Динамика преобразователя согласно исходной расчетной модели (рис.
5.17, а), когда энергия направлена от электродвигателя к исполнительному
механизму, описывается системой дифференциальных уравнений:
,RRv
,i
,i
,
R
1
М
R
1
МFFF
,iМM
,iМM
,
dt
dv
mFF
,
dt
d
JММ
,
dt
d
JММ
,
dt
d
J)ММ(М
3432424
1313
1212
34
34
34п24
24
24п42д41д4д
131313п3д
121212п2д
4
44п4д
3
334п3д
2
224п2д
1
113п12п1д
(5.19)
где F
п4
= F
н
усилие статического сопротивления нагрузки.
Если учесть, что в рассматриваемой структуре i
12
= i
13
и R
24
= R
34
, а
также принять
12
=
13
и
24
=
34
, то предыдущее выражение можно
представить с использованием операторной формы записи в виде:
,Rv
,i
,vpmF)FF(
,p)JJ()ММ()ММ(
,pJ)ММ(М
4)3(2)3(24
)3(121)3(2
44н42д41д
)3(23234п24п3д2д
1113п12п1д
(5.20)
240
или иначе
,Rv
,i
,vpmF
R
1
)МM(
,p)JJ()ММ(i)ММ(
,pJ)ММ(М
4)3(2)3(24
)3(121)3(2
44н4)3(2
4)3(2
34п24п
)3(23234п24п)3(12)3(1213п12п
1113п12п1д
(5.21)
где R
24
, R
34
– радиусы приведения от выходных валов 2 и 3 со скоростями
2
и
3
соответственно к скорости валка v
4
.
Выражению (5.21) соответствует преобразованная расчетная модель
преобразователя, представленная на рис. 5.17, б.
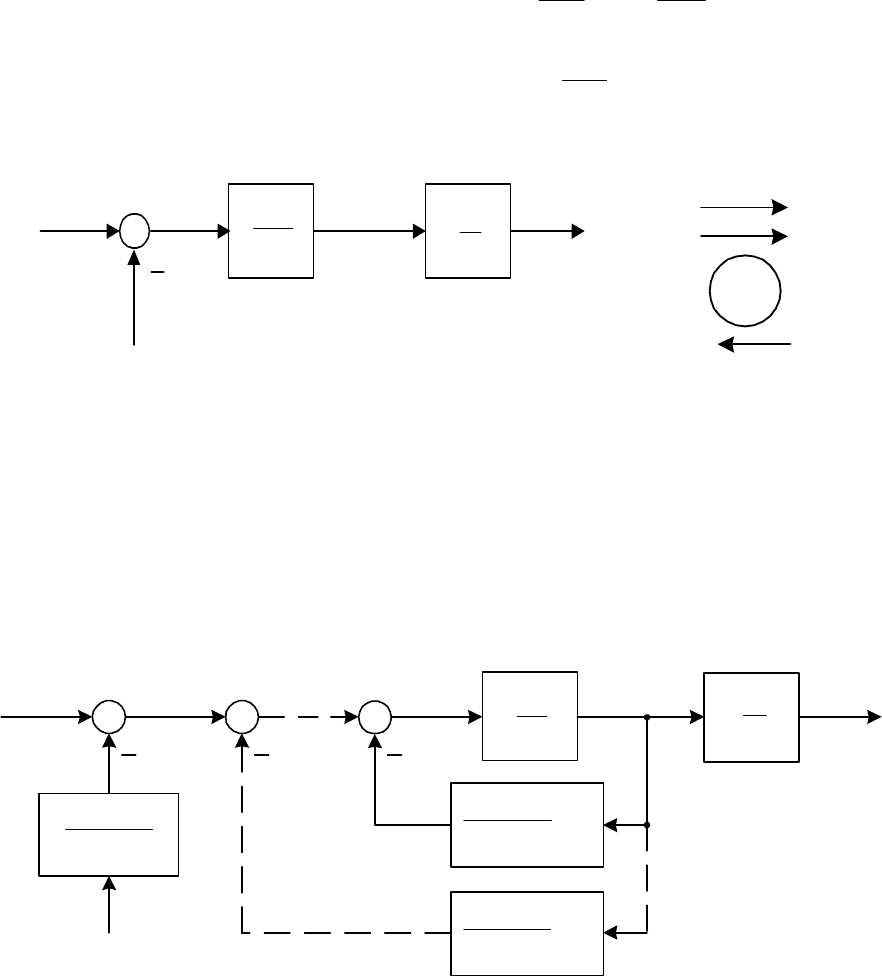
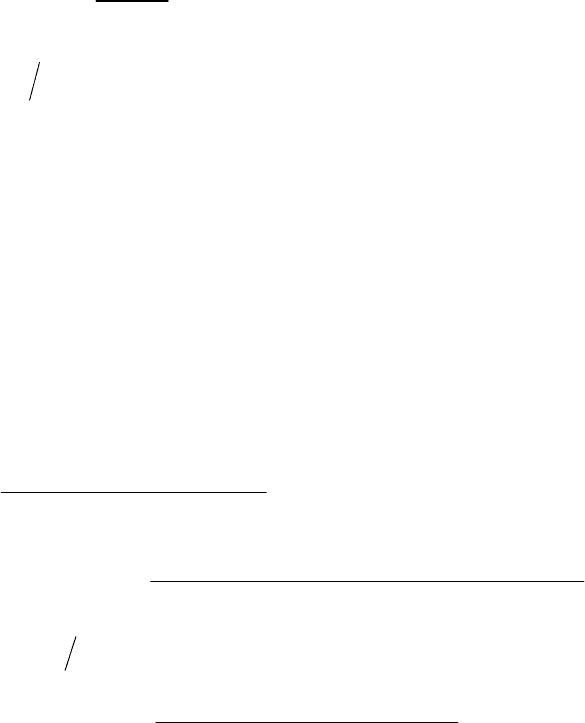
После представления уравнений (5.21) в виде
4)3(2)3(24
4)3(2
4)3(2н44
34п24п
)3(121)3(2
)3(12)3(12
34п24п)3(232
13п12п
1
13п12п1д
1
Rv
,
R)Fvpm(
)ММ(
,i
,
i
ММpJJ
)ММ(
,
pJ
)ММ(М
(5.22)
может быть сформирована развернутая структурная схема преобразователя
(рис. 5.18) при прямом направлении передачи энергии.
241
Рис. 5.18
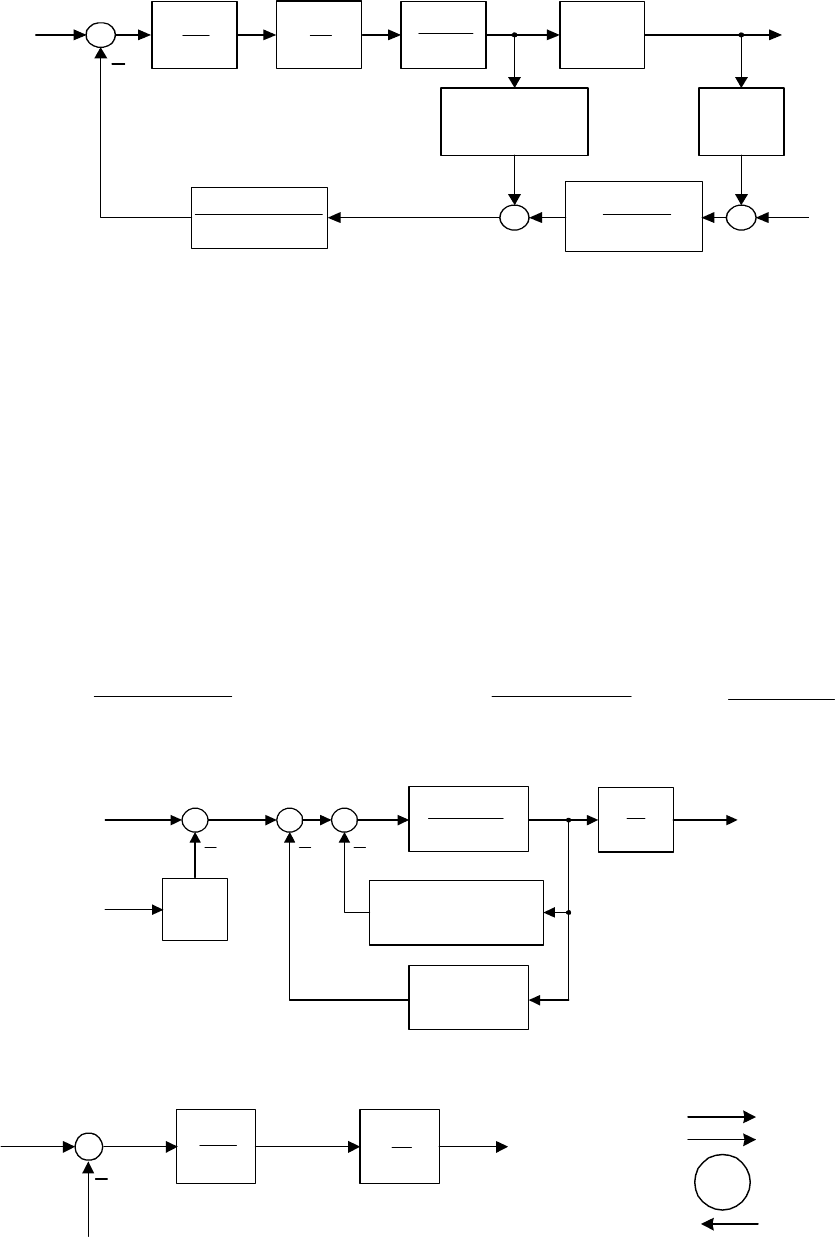
Приняв за входное управляющее воздействие вращающий момент
двигателя М
д1
, а за выходную переменную его частоту вращения
1
,
представим структурную схему (рис. 5.18) в виде нормализованной
развернутой трехмассовой и эквивалентной одномассовой моделей (рис.
5.19) c приведенными параметрами и возмущающим воздействием, значения
которых в данном случае определяются выражениями:
,FKМ
;mK)JJ(KJJ
нFннпр
44m32)3(2J1пр
где
)4(13)3(12
4)3(2
Fн
i
R
К
η
,
1K
1J
,
)3(12
2
)3(12
3J2J
i
1
KK
η
,
14
2
)3(12
2
4)3(2
4m
i
R
K
η
.
а)
б) в)
Рис. 5.19
1
1
J
p
1
)3(12
1
i
1д
M
1
w
)3(2
w
)3(12)3(12
1
i
pJJ
)(
32
4)3(2
4)3(2
R
4)3(2
R
pm
4
4
v
н
F
)(
32)3(2
JJK
J
44
mK
m
p
1
Fн
K
н
F
1д
M
1
w
11
1
JK
J
пр
J
1
p
1
нпр
M
1д
M
1
w
1д
M
нпр
M
1
w
пр
J
242
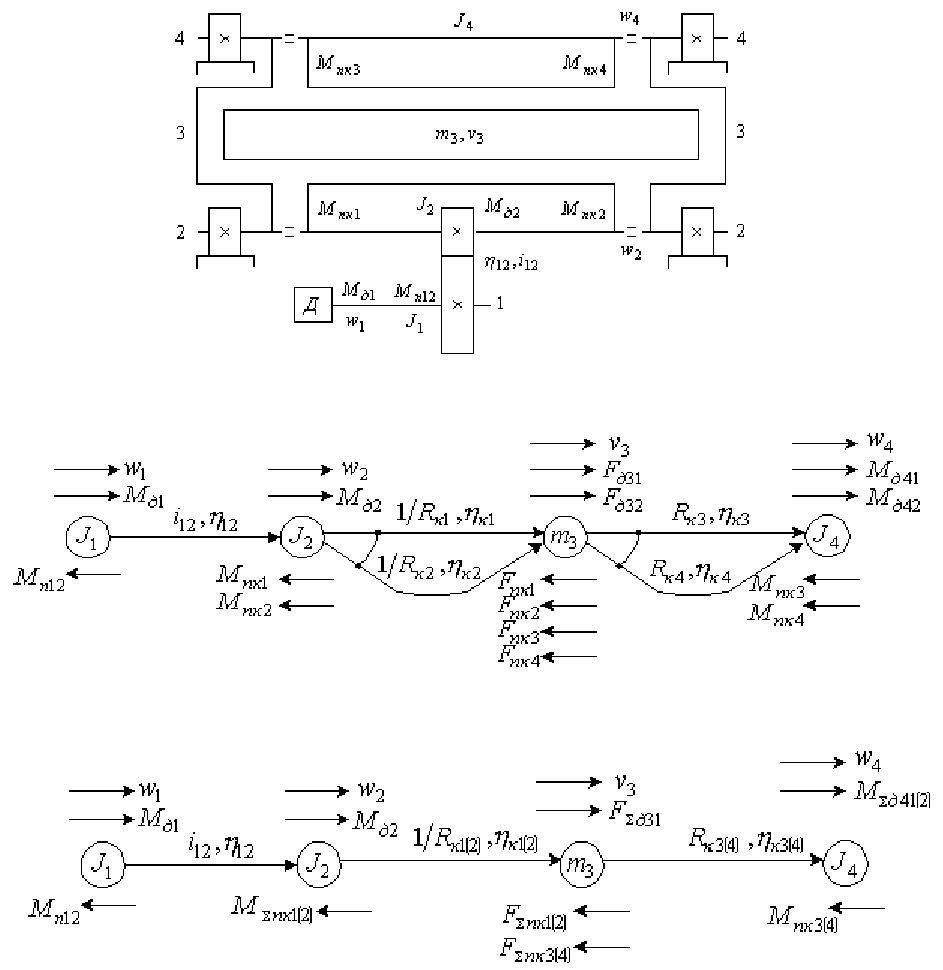
Рассмотрим кинематическую схему широко распространенного в
промышленности однодвигательного электропривода механизма
передвижения транспортной тележки (рис. 5.20), состоящего из
вертикального редуктора, двух приводных и двух неприводных, жестко
связанных одним валом ходовых колес. Механическая часть
рассматриваемого электропривода может быть представлена исходной
расчетной схемой, изображенной на рис. 5.20, б.
а)
б)
в)
243
Рис. 5.20
244
Эта модель является четырехмассовой. На модели обозначено: J
1
, J
2
, J
4
,
m
3
– соответственно моменты инерции первой оси, приводной и
неприводной колесных пар и масса поступательно движущихся частей.
Исходная расчетная схема может быть описана системой дифференциальных
уравнений движения масс и уравнений связи между массами в операторной
форме
.Rv
,Rv
,i
,RFМ
,RFМ
,
R
1
МF
,
R
1
МF
,iММ
,pJММММ
,vpmFFFFFF
,pJМММ
,pJММ
)4(3к34
)2(1к23
1212
4к4к4пк42д
3к3к3пк41д
2к
2к
2пк32д
1к
1к
1пк31д
121212п2д
444пк3пк42д41д
334пк3пк2пк1пк32д31д
222пк1пк2д
1112п1д
(5.23)
В приведенных уравнениях:
1к
1
1пк
R
4Gk
F
,
2к
2
2пк
R
4Gk
F
силы
сопротивления движению приводных колес;
4GkМ
33пк
,
4GkМ
44пк
моменты сопротивления движению неприводных колес
транспортной тележки; где k
1
, k
2
, k
3
, k
4
– коэффициенты трения качения
колес по рельсам (плечо реактивной силы); R
к1
, R
к2
, R
к3
, R
к4
– радиусы колес;
G – сила тяжести перевозимого груза и тележки.
Примем R
к1
= R
к2
= R
к3
= R
к4
и k
1
= k
2
= k
3
= k
4
. С учетом принятого
систему (5.23) можно записать так: