Тимофеев В.Н. (ред.) Применение магнитогидродинамических устройств в металлургии
Подождите немного. Документ загружается.

205
Е
a(b,c)
= К·(V
зr
-К
ос
·V
r
)/(1+pT), (4.67)
где Е
a(b,c)
– амплитудное значение ЭДС фазы питающего преобразователя; К,
К
ос
– коэффициент усиления регулятора скорости совместно с
преобразователем и канала обратной связи по скорости; V
зr
– сигнал задания
линейной скорости V
r
вторичного элемента; T – постоянная времени фильтра
на входе преобразователя. Модель агрегата нагрузки представлена
выражением его статической механической характеристики F
c
= a + b·V
r
, где
b = соnst – коэффициент статической жесткости, а = var – коэффициент,
определяющий нагрузочный режим ЛАД и являющийся нелинейной
функцией времени. Дискретное изменение этого коэффициента в процессе
снятия характеристик осуществляется автоматом управления агрегата
нагрузки. Один из возможных алгоритмов его изменения может быть записан
в следующем виде:
nnn
22
11
tt1tприa
..........................
tt1tприa
tt0приa
a
где n – число нагрузочных режимов ЛАД, причем а
1
> а
2
>...> а
n
.
Модель измерительной системы включает математическое описание
каналов измерения интересующих нас выходных переменных y
i
,
характеризующих статический режим работы машины (к.п.д., cоs, s, I
s
, F,
V
r
). Входными переменными МИС являются мгновенные значения
переменных e
a
, e
b
, e
c
, i
a
, i
b
и i
c
, а также текущие значения V
r
, F
c
. Вычисление
выходных переменных для каждого из нагрузочных режимов машины
производится на участках ее установившегося движения.
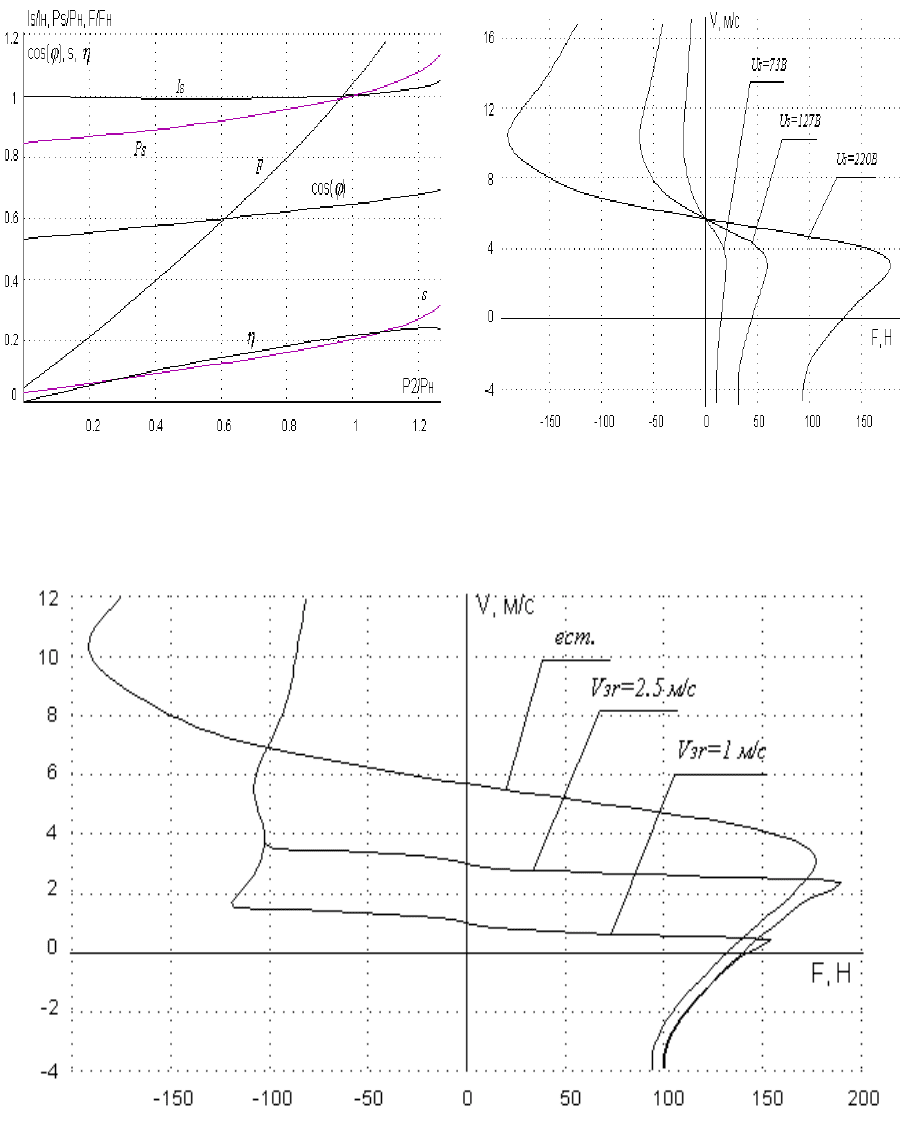
Для иллюстрации возможностей описываемого метода ниже
представлены результаты расчета рабочих (а) и механических характеристик
одностороннего ЛАД с короткозамкнутым вторичным элементом (P
н
=0,6
кВт, U
фн
=220 В, I
н
=4,6 А,
в
=5 мм) для разомкнутых (рис. 4.82) и замкнутых с
П-регулятором скорости (рис. 4.83) систем электропривода.
206
а)
б)
Рис. 4.82
Рис. 4.83
207
4.7. Моделирование лад в замкнутой системе
Электропривода
Непрерывное совершенствование технологических процессов требует
расширения функциональных возможностей промышленных
электроприводов и повышения качества их работы. Одним из возможных
путей решения этой задачи для электроприводов с ЛАД является применение
замкнутых систем с управляемыми регуляторами напряжения (УРН),
обеспечивающими изменение амплитуды первой гармоники напряжения фаз
обмотки индуктора и обладающими сравнительно низкой стоимостью,
относительной
простотой и хорошими массо-габаритными показателями.
Однако разработка систем этого класса связана с рядом особенностей,
обусловленных, прежде всего, нелинейными свойствами ЛАД.
Рассмотрим систему стабилизации и регулирования скорости
электропривода (рис. 4.84), содержащую:
– односторонний ЛАД с короткозамкнутым вторичным элементом.
Алгоритм функционирования двигателя представлен в виде
детализированной структурной схемы [21], а его механическая часть –
уравнением
движения линейной одномассовой механической системы.
Отметим, что эта модель, в отличие от других известных, обладает большой
универсальностью, так как позволяет моделировать все реально возможные
режимы управления линейным электродвигателем. Входной информацией
модели являются амплитудные значения напряжений фаз обмотки индуктора
в двигательном и тормозном (противовключение) режимах;
– управляемый регулятор напряжения (УРН) с системой
импульсно-
фазового управления, представленный безынерционным звеном с фильтром
на входе. Входной информацией регулятора является выходной
(скорректированный) сигнал регулятора скорости, а выходами –
амплитудные значения напряжений фаз обмотки индуктора;
систему управления (управляющее устройство), включающую
регулятор скорости (РС), два блока коррекции (БК1, БК2) и блок
перемножения (БП), и реализующую следующий алгоритм
функционирования:
,ffKVKUU
2k1kрсvзрс
(4.68)
где U
з
, V – сигнал задания и действительное значение линейной скорости
вторичного элемента ЛАД;
K
рс
, К
v
– коэффициент усиления регулятора скорости и коэффициент
передачи канала обратной связи по скорости (ДС);
f
k1
, f
k2
– функции коррекции выходного сигнала системы управления.
208
Рис. 4.84
Выражения корректирующих функций f
k1
и f
k2
для различных вариантов
структурных схем системы электропривода показаны в таблице 4.1, где
обозначено: U
з
, U
v
– задающее и контрольное воздействия; U
зm
–
максимальное (номинальное) значение задающего воздействия; T
ф
–
постоянная времени фильтра в канале первой корректирующей цепи.
Уравнение состояния ключа К имеет вид:
.иначеесли,1
,0ΔUUUесли,0
K
зv
Моделирование работы системы при различных вариантах структуры
модели с блоками коррекции, выходные сигналы которых функционально
связаны с задающим и контрольным воздействиями, показывает возможность
влияния на показатели качества регулирования электропривода с ЛАД.
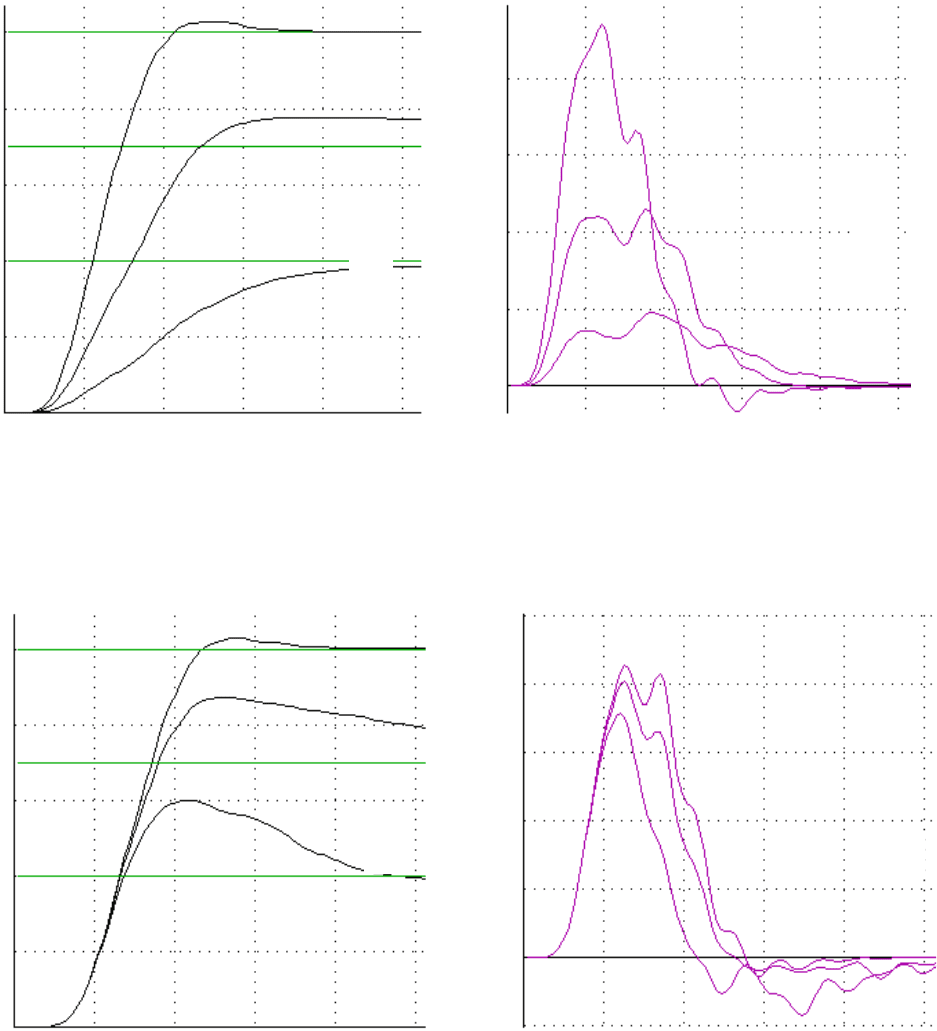
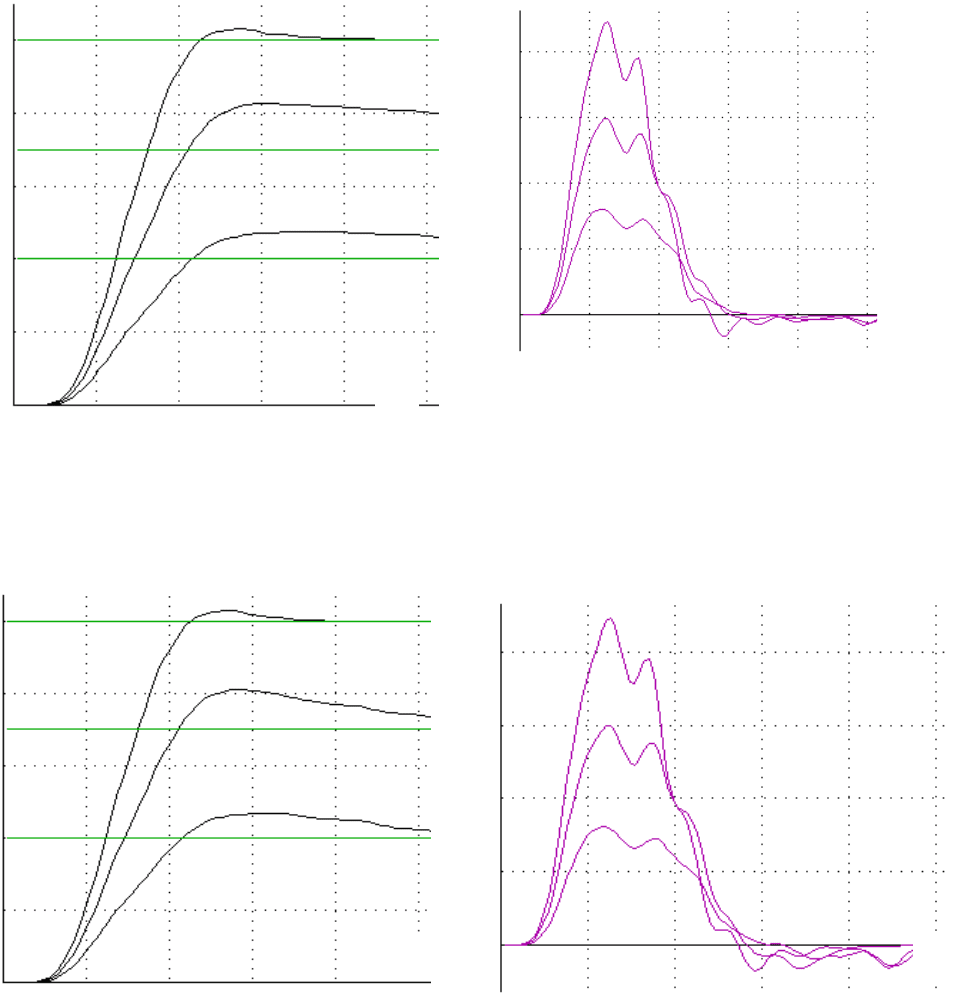
Эффект от введения корректирующих блоков в структуру системы (в
соответствии с таблицей 4.1) иллюстрируется рис.4.85 – 4.88, на которых
приведены
диаграммы изменения скорости (а) и электромагнитного усилия
(б) ЛАД в функции времени при отработке системой различных по уровню
скачкообразных сигналов задающего воздействия.
Таблица 4.1
Вариант
структур
ы модели
Выражение корректирующей функции
fk1 fk2
1 1 1
2
1pT1UUU
фззm
1
3
1pT1UUU
фззm
Δ
1
4
1pT1UUU
фззm
Δ
UUU1K
зv
Δ
БП
БК2
БК1
РС РН ЛАД
ДС
Uзm
Uз
Uv
f k2
f k1
Uрс
Ua
Ub(c)
Uc(b)
Ia(b,c)
F
V
209
a) б)
Рис. 4.85. (вариант 1)
а) б)
Рис. 4.86 (вариант 2)
0.02
1
V, м/с
0.04 0.06 0.08 0.1
2
3
4
5
V
r
V
з
0
F, H
200
400
600
800
0
0.02 0.04 0.06 0.08 0.10
200
400
600
800
0
0.02 0.04 0.06 0.08 0.10
F, H
1
000
-200
0.02
1
0.04 0.06 0.08 0.
1
2
3
4
5
0
V, м/с
V
r
V
з
t
t
t t
210
а) б)
Рис. 4.87 (вариант 3)
а) б)
Рис. 4.88 (вариант 4)
200
400
600
800
0
0.02 0.04 0.06 0.08 0.10
F, H
0.02
1
0.04 0.06 0.08 0.1
2
3
4
5
0
V
r
V
з
V, м/с
t
0.02
1
0.04 0.06 0.08 0.1
2
3
4
5
0
V, м/с
V
з
V
r
200
400
600
800
0
0.02 0.04 0.06 0.08 0.10
F, H
t t
211
4.8. Структурные схемы тепловых цепей лад
В ряде случаев индукционные машины (например, линейные
асинхронные двигатели транспортной системы с эстафетной передачей
конвейерного поезда от одного работающего индуктора к другому)
характеризуются высокими электромагнитными нагрузками при малой
продолжительности включения. Эта особенность требует тщательного
исследования тепловых переходных процессов в машине, особенно в пуско-
тормозных и аварийных режимах работы [28].
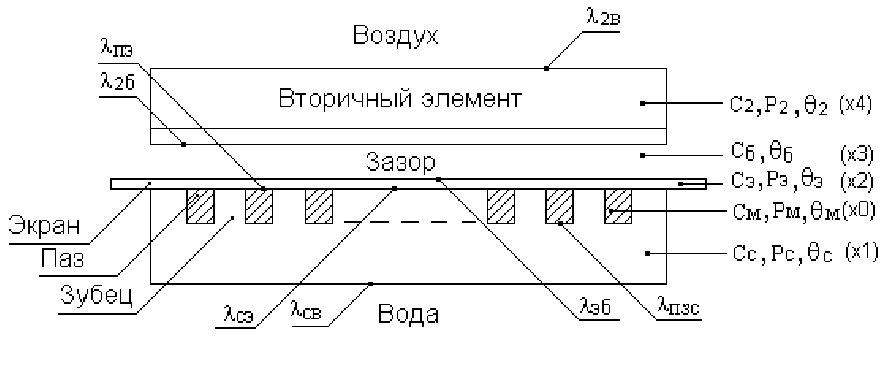
С точки зрения нагрева двигатель рис. 4.89 рассматривается как совокупность
отдельных элементов, связанных тепловыми проводимостями и обладающих
теплоемкостями (многомассовая система [16]). В некоторых из них выделяются потери
мощности, которые определяются из электромагнитного расчета [7].
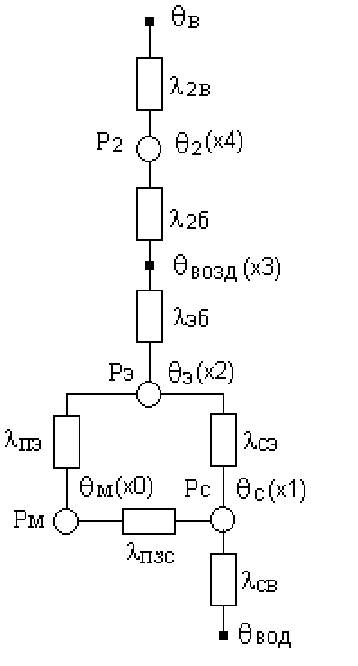
Тепловая цепь, соответствующая этой системе, представлена схемой
замещения рис. 4.90, на которой введены следующие обозначения:
температуры обмотки
M
(переменная состояния Х
0
), сердечника
C
(Х
1
),
экрана
Э
(Х
2
), воздуха в зазоре
воздб
(Х
3
), вторичного элемента
2
(Х
4
), а также охлаждающей сердечник воды
вод
и окружающего вторичный
элемент (ВЭ) воздуха
в
; потери в обмотке
М
Р , в сердечнике
С
Р , в экране
Э
Р , во ВЭ
2
Р ; тепловые проводимости
св
λ (сердечник – вода),
пзс
λ
(паз – зубец – сердечник),
сэ
λ (сердечник – экран),
эб
λ и
б2
λ (экран – зазор
и ВЭ – зазор),
в2
λ (ВЭ – воздух).
Рис. 4.89
п
Индуктор
212
Рис. 4.90
Для тепловой цепи рис. 4.90 справедлива система дифференциальных
уравнений
P
м
=(x
0
–x
2
)·
пэ
+(x
0
–x
1
)·
пзс
+C
м
·dx
0
/dt ;
P
с
=(x
1
–x
0
)·
пзс
+(x
1
– x
2
)·
сэ
+(x
1
вод
)·
св
+C
c
·dx
1
/dt ;
P
э
=(x
2
–x
0
)·
пэ
+(x
2
–х
1
)·
сэ
+(x
2
–x
3
)·
эб
+C
э
·dx
2
/dt ; (4.69)
0=(x
3
–x
2
)·
эб
+(x
3
–x
4
)·
2б
+C
б
·dx
3
/dt,
P
2
=(x
4
–x
3
)·
2б
+(x
4
–
в
)·
2в
+C
2
·dx
4
/dt ,
или в операторной форме при нулевых начальных условиях
P
м
=(x
0
–x
2
)·
пэ
+(x
0
–x
1
)·
пзс
+C
м
·px
0
;
P
с
=(x
1
–x
0
)·
пзс
+(x
1
–x
2
)·
сэ
+(x
1
–
вод
)·
св
+C
c
·px
2
;
P
э
=(x
2
–x
0
)·
пэ
+(x
2
–x
1
)·
сэ
+(x
2
–x
3
)·
эб
+C
э
·px
3
; (4.70)
0=(x
3
–x
2
)·
эб
+(x
3
–x
4
)·
2б
+C
б
·px
4
,
P
2
=(x
4
–x
3
)·
2б
+(x
4
–
в
)·
2в
+C
2
·px
5
.
213
Выражение (4.70) представим в виде
px
0
=P
м
–(x
0
–x
1
)·
пзс
–(x
0
–x
2
)·
пэ
·1/C
м
;
px
1
=P
с
+(x
0
–x
1
)·
пзс
–(x
1
– x
2
)·
сэ
–(x
1
–
вод
)·
св
·1/C
c
;
px
2
=P
э
+(x
1
–x
2
)·
сэ
+(x
0
–x
2
)·
пэ
–(x
2
–x
3
)·
эб
·1/C
э
; (4.71)
px
3
=(x
2
–x
3
)·
эб
–(x
3
–x
4
)·
2б
·1/C
б
,
px
4
=P
2
+(x
3
–x
4
)·
2б
–(x
4
–
в
)·
2в
·1/C
2
.
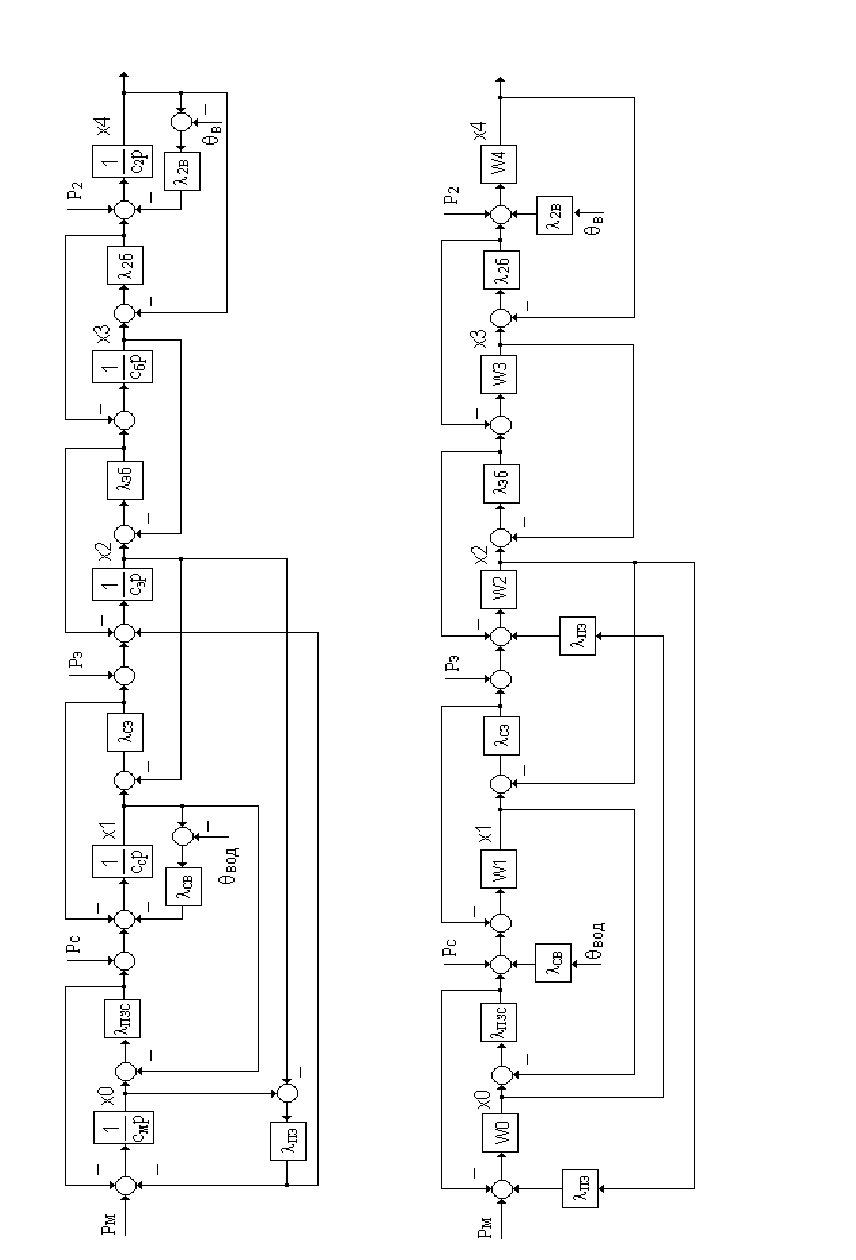
Детализированная структура и структурная схема пятимассовой
тепловой модели ЛАД, сформированные на основании (4.71), показаны
на рис. 4.91, где обозначено:
W
0
=(1/
пэ
)/1+(C
м
/
пэ
)·p; W
1
=(1/
св
)/1+(C
с
/
св
)·p;
W
2
=(1/
пэ
)/1+(C
э
/
пэ
)·p; W
3
=1/(С
б
·p), W
0
=(1/
2в
)/1+(C
2
/
2в
)·p.
Преобразуем (4.71) в (4.72), в результате получим модель в переменных состояния (рис. 4.92).
px
0
=–(
пзс
+
пэ
)·x
0
+
пзс
·x
1
+
пэ
·x
2
+P
м
·1/C
м
;
px
1
=–(
пзс
+
сэ
+
св
)·x
1
+
пзс
·x
0
+
сэ
·x
2
+
св
·
вод
+P
с
·1/C
c
;
px
2
=–(
пэ
+
сэ
+
эб
)·x
2
+
пэ
·x
0
+
сэ
·x
1
+
эб
·x
3
+P
э
·1/C
э
; (4.72)
px
3
=–(
эб
+
2б
)·x
3
+
эб
·x
2
+
2б
·x
4
·1/C
б
;
px
4
=–(
2б
+
2в
)·x
4
+
2б
·x
3
+
2в
·
в
+P
2
·1/C
2
;
Переходные процессы нагрева в пятимассовой модели ЛАД при
нулевых начальных условиях
м
(x
0
) = 0,
с
(x
1
) = 0,
э
(x
2
) = 0,
возд
(x
3
) = 0,
2
(x
4
)=0, различных постоянных воздействиях P
м
, P
с
, P
э
, P
2
и
в
=
возд
=25С
приведены на рис. 4.93. Воздействия и параметры, характеризующие объект,
имеют следующие числовые значения:
P
м
=(1885,7+3834) Вт; С
м
=(6442,8 +16917,2) (Вт ·с)/С; C
б
=400 (Вт ·с)/С;
P
с
= 876,3 Вт; С
с
= 7724,9 (Вт ·с)/С;
пэ
=1,7 Вт /С;
св
=22 Вт /С;
P
э
= 3286,3 Вт; С
э
= 4681 (Вт ·с)/С;
сэ
=1,12 Вт /С;
эб
=17,2 Вт /С;
P
2
=14336 Вт; С
2
=74000 (Вт ·с)/С;
2б
=17,2 Вт /С;
2в
=142 Вт /С;
вод
=25С;
в
=25С;
пзс
=244 Вт /С;
214
а) б)
Рис. 4.91