Тимофеев В.Н. (ред.) Применение магнитогидродинамических устройств в металлургии
Подождите немного. Документ загружается.

175
эффекта. «Активная Зона» соответствует зоне II, в ней расположен индуктор.
В блоке «мех.часть» происходит расчет механических величин двигателя
(усилия, скорости и координаты перемещения ВЭ) а также вывод их в виде
графиков.
«Активная зона» имеет пять выходных сигналов. В краевые зоны от нее
поступают сигналы вторичных токов и потоков в
ярме крайних каналов
(пазов). Пятый сигнал в блок «мех. часть» это суммарное усилие,
создаваемое индуктором в активной зоне. На вход блока «Активная Зона»
поступает также пять сигналов: сигналы вторичных токов и потоков крайних
каналов (пазов) из краевых зон и сигнал обратной связи из блока «мех.
часть» скорость движения
вторичного элемента. Краевые зоны имеют по
три входных и выходных сигнала. В них поступают сигналы вторичных
токов и потоков крайних каналов (пазов) из активной зоны и обратная связь
по скорости вторичного элемента. Выходящие суммарные усилия из краевых
зон также поступают в блок «мех. часть».
Краевые зоны состоят из четырех каналов и
имеют одинаковую
структуру (рис. 4.33). Все каналы кроме крайнего принимают и отдают
сигналы по вторичному току и контурному потоку в соседние. Крайний
(последний) канал обменивается этими сигналами только с одним соседним
каналом. Все элементарные усилия от пазов суммируются и подаются за
пределы блока краевой зоны. В блок так же поступает сигнал
по скорости
вторичного элемента, который разводится к каждому каналу.
Рис. 4.33
176
Модель активной зоны представлена на рис. 4.34. Для рассматриваемого
случая (q=2, 2p=2) она состоит из двух полюсных делений (Тау1 и Тау2) а
также двух блоков задания напряжений для питания кольцевой обмотки
индуктора, которые создают симметричную двенадцатифазную систему
напряжений. C ростом 2p двигателя количество блоков модели
увеличивается. Каждое полюсное деление имеет одиннадцать входных
сигналов. Четыре из
них – сигналы вторичных токов и контурных потоков от
соседних зубцовых делений.
Рис. 4.34
Кроме этого вводятся сигнал по скорости вторичного элемента и шесть
сигналов из блоков «Е для Тау» это ЭДС для каждого канала, т.е. сигнал по
напряжению от каждой из двенадцати фаз. Блок «Е для Тау1» содержит
шесть синусоидальных источников питания со сдвигом фаз на 30
0
– от 0
0
до
180
0
, «Е для Тау2» от 180
0
до 360
0
. Суммарные усилия полюсных делений
суммируются в общее усилие активной зоны.
Модели полюсных делений активной зоны (Тау1, Тау2) имеют
одинаковую структуру (рис. 4.35). Они состоят из шести каналов (пазов).
Каждый канал представлен в виде детализированной структурной схемы
(рис. 4.24). Структура полюсных делений аналогична многоканальной
структуре краевых зон с той разницей, что к каждому
(из двенадцати) каналу
подводится сигнал по напряжению от двенадцатифазной системы
напряжений, находящейся в блоках «Е для Тау».
Модель механической части линейного двигателя в составе
электропривода представлена на рис. 4.36.
177
Рис. 4.35
На сумматоре «Сумма f» складываются усилия, поступившие от
активной и краевых зон, а также усилия сопротивления и наброса нагрузки (в
случае их наличия в реальной системе электропривода). Выводится сигнал по
скорости движения вторичного элемента, который затем вводится в каждый
канал (паз) схемы двигателя.
Рис. 4.36
178
Рассчитанные значения усилия, скорости, координаты ВЭ и зависимости
динамического усилия от скорости (фазовый портрет) подаются на
графопостроители.
В качестве примера на рис. 4.37 показана зависимость от времени динамического
усилия, развиваемого активной и краевой зонами при запуске двигателя, параметры
которого приведены в приложении 1. В момент времени 0,2 с осуществляется наброс
нагрузки, равной 100 Н.
Рис. 4.37
Схема барабанной обмотки «звезда с нейтралью».
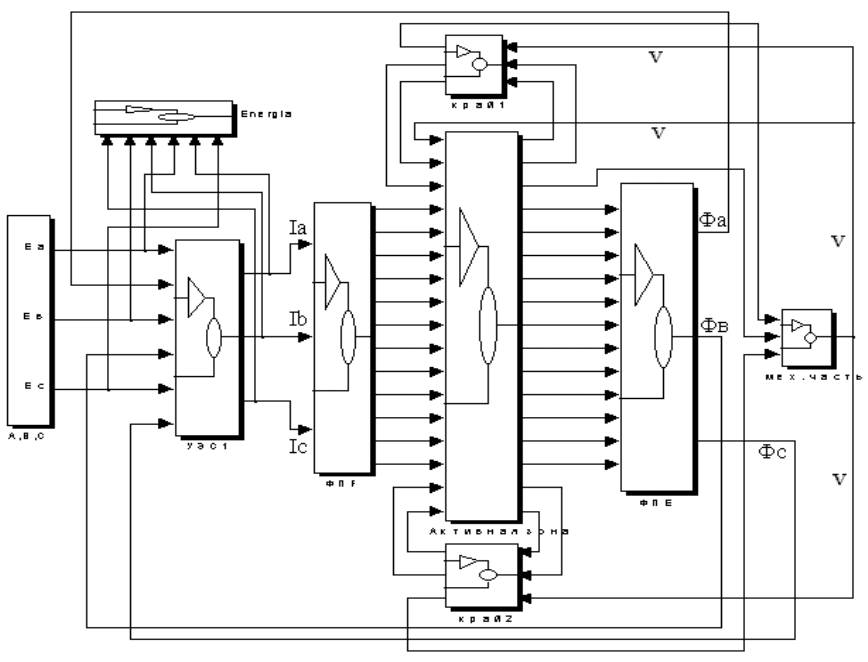
Модель ЛИМ в SIMULINK в случае питания барабанной обмотки по
схеме “звезда с нейтралью” имеет вид рис. 4.38.
179
Рис. 4.38
Блок «А, В, С» моделирует трехфазный источник питания, с
напряжением источника 380 В, частотой – 50 Гц. В блоке «УЭС1» находится
динамическое звено 1 (рис. 4.12), которое является моделью j-ой
элементарной обмотки индуктора ЛИМ. В данной схеме оно вынесено за
пределы каналов в отдельный блок, поскольку секции каждой фазы обмотки
располагаются в нескольких
пазах (каналах) индуктора. Блок «ФПF» –
функциональный преобразователь пазовых токов (МДС). Блок «ФПЕ» –
функциональный преобразователь потоков фаз. Структура блоков «Край1»,
«Край2», «мех. часть» осталась такой же, как и в случае схемы «фаза-паз».
Структура блока «Активная зона» претерпела незначительные изменения,
теперь из него выводятся не только потоки крайних пазов (каналов), но
и
всех остальных для передачи их в функциональный преобразователь ФПЕ.
Блок «Energia» предназначен для подсчета энергии, потребляемой
двигателем во время работы.
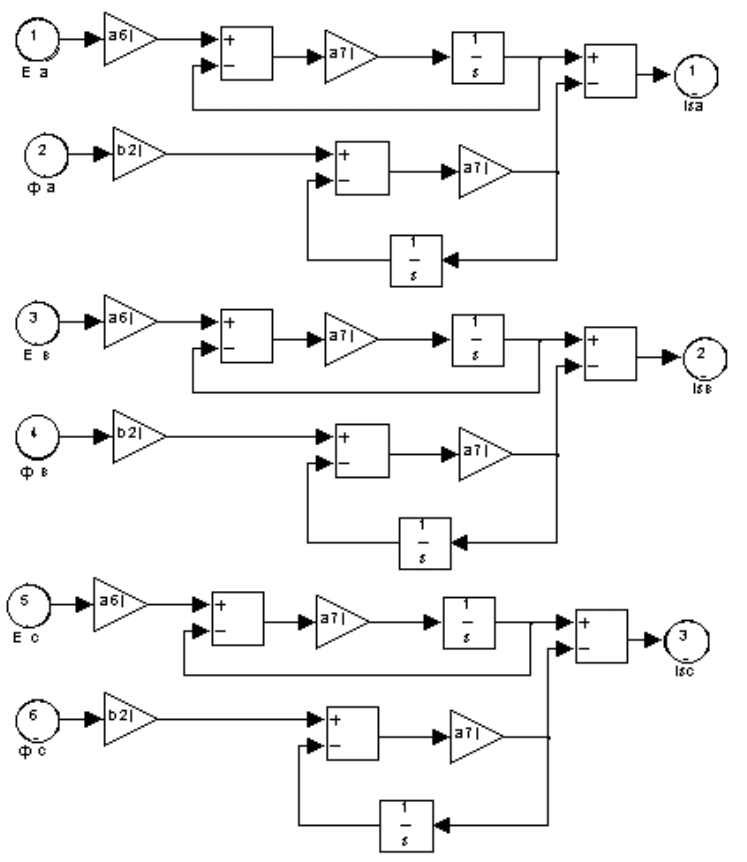
Блок «УЭС1» показан на рис. 4.39. В нем определяются токи трех фаз на
основе напряжений и потоков этих фаз.
180
Рис. 4.39
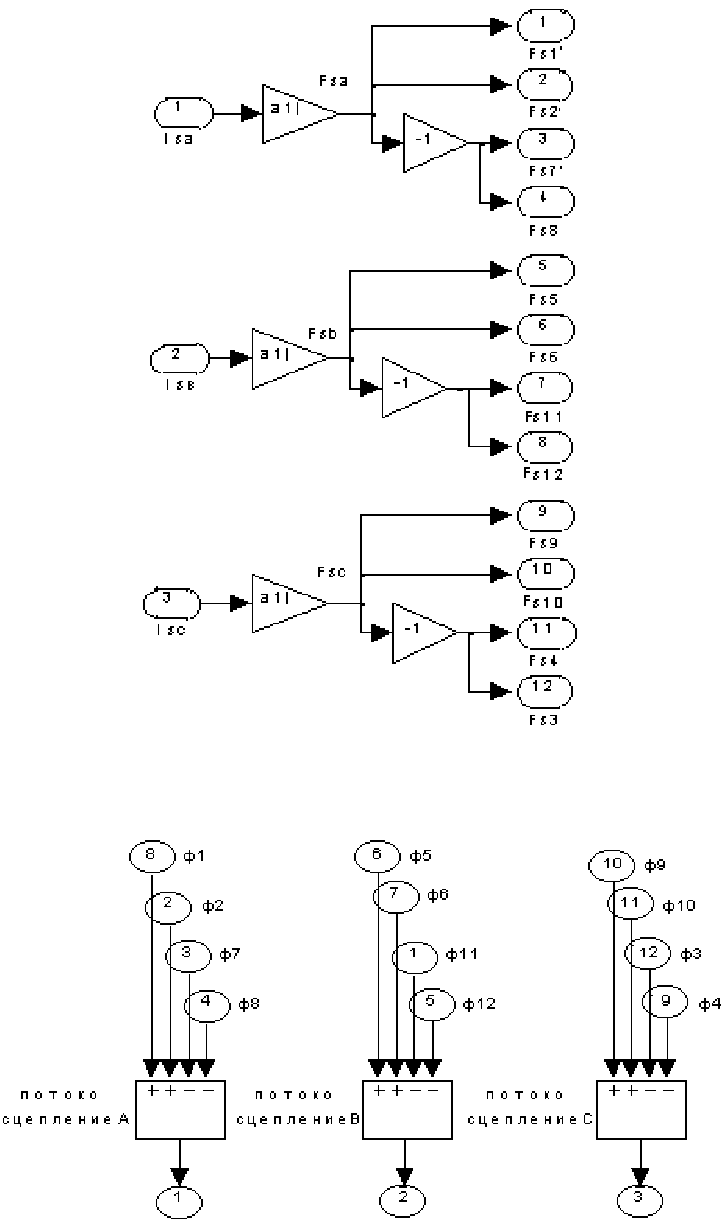
Блок «ФПF» показан на рис. 4.40. В нем производится «раскладка»
токов фаз по пазам согласно матрице K
f
. Как уже отмечалось ранее, этот блок
играет в модели роль клеммной панели двигателя, на которую выведены
зажимы всех катушек обмотки для соединения их по нужной схеме (в данном
случае по схеме «звезда с нейтралью»).
Блок «ФПЕ» показан на рис. 4.41. В нем происходит алгебраическое
суммирование контурных потоков, проходящих через участки ярма
сердечника и сцепленных с секциями каждой фазы (параллельной ветви)
обмотки. После умножения их на количество витков в секции формируются
потокосцепления фаз.
181
Рис. 4.40
Рис. 4.41
182
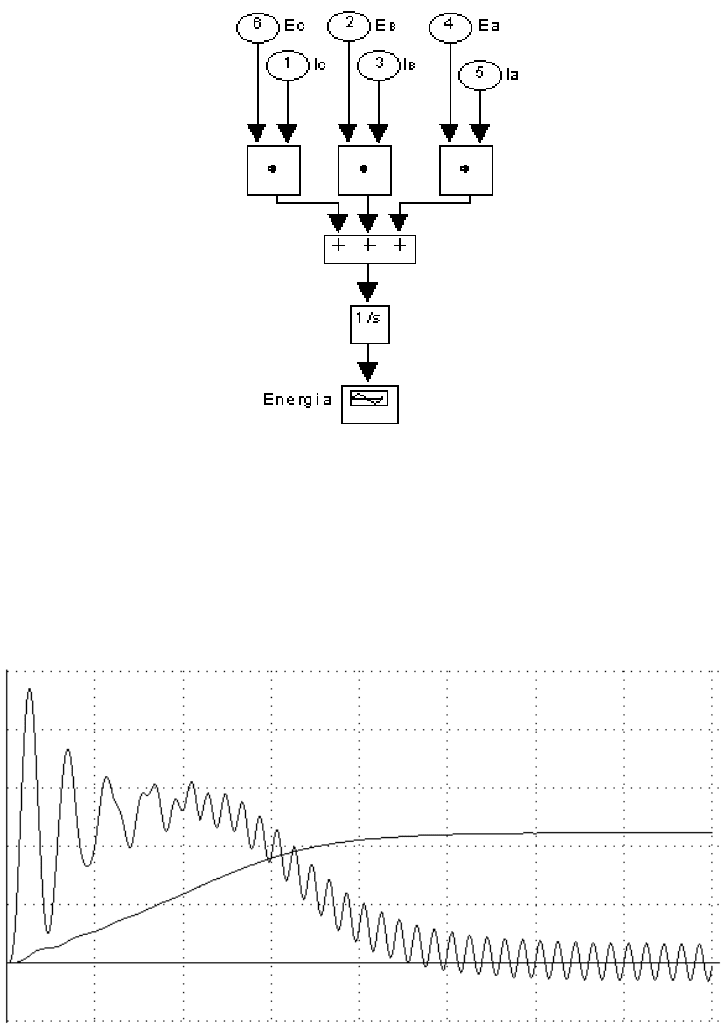
Блок “Energia” показан на рис. 4.42. В него подаются сигналы по токам и
напряжениям всех трех фаз. После их перемножения и суммирования
получаем полную мощность линейного двигателя, а после интегрирования –
потребляемую энергию. Рассчитанное потребление энергии выводится на
графопостроитель.
Рис. 4.42
Зависимости усилия и скорости двигателя от времени при его запуске
показаны на рис. 4.43
Рис. 4.43
200
150
100
50
0
-50
0.1 0.2 0.3 0.40.150.050 0.25 0.35
F, H
V*20, м/с
t, c
F
V
r
183
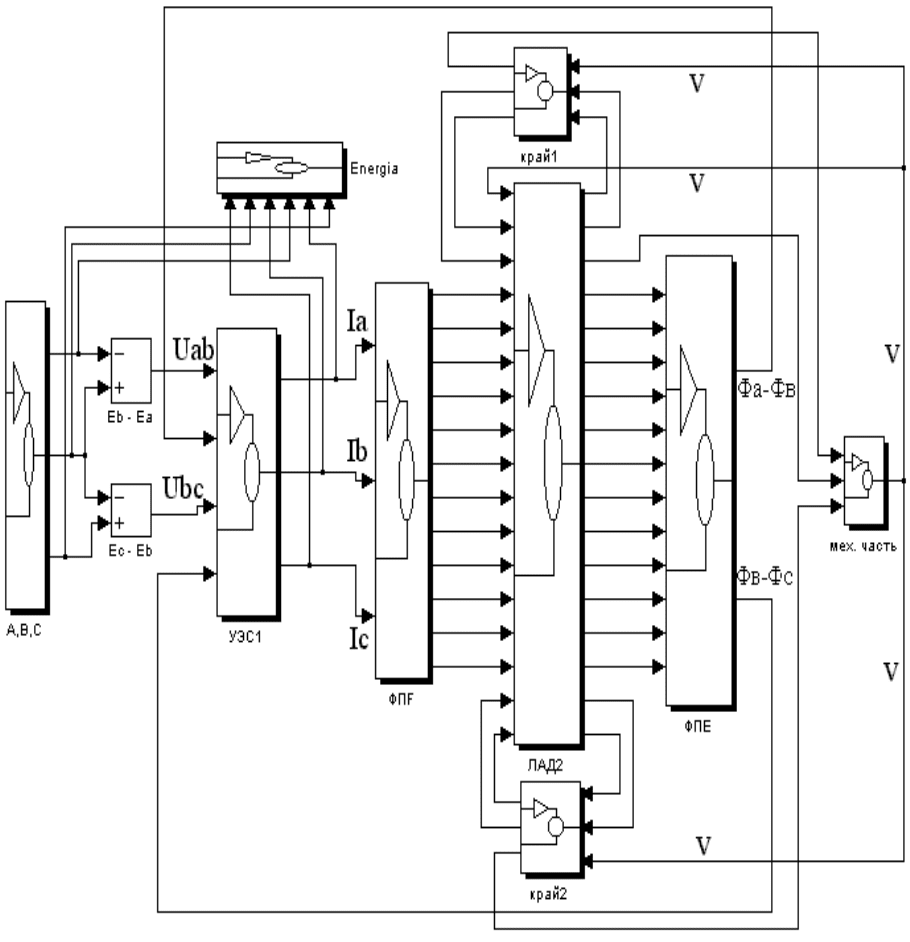
Схема питания «звезда без нейтрали»
Модель ЛИМ в Simulink в случае схемы питания “звезда без нейтрали”
имеет вид рис. 4.44. Она имеет некоторые отличия от схемы «звезда с
нейтралью».
В этой модели блоки «Е
в
–Е
а
», «Е
с
–Е
в
» обеспечивают получение
линейных напряжений U
ab
и U
bc
на входе блока «УЭС1». Блок «УЭС1»
является детализированной структурной схемой (ДСС) электрической части
индуктора и показан на рис. 4.45.
Рис. 4.44
184
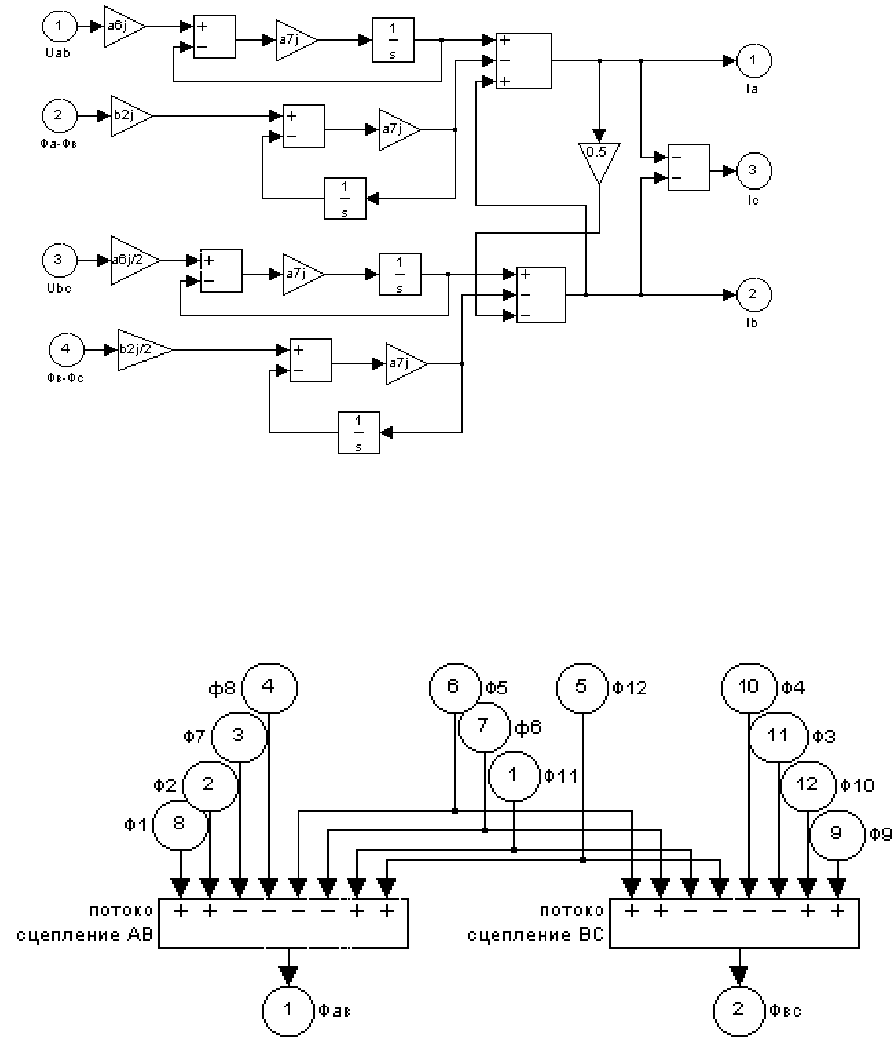
Рис. 4.45
Блок «ФПЕ» представлен на рис. 4.46. С его помощью вычисляются
разности потоков, сцепленных с фазами, «Ф
а
Ф
в
», «Ф
в
Ф
с
».
Рис. 4.46.
Остальные блоки модели остаются такими же, как и в модели с обмоткой индуктора
«звезда с нейтралью».