Тимофеев В.Н. (ред.) Применение магнитогидродинамических устройств в металлургии
Подождите немного. Документ загружается.

245
,Rv
,Rv
,i
,iММ
,pJММ
,vpmFFF
,pJММ
,pJММ
)4(3к34
)2(1к23
1212
121212п2д
44)4(3пк)2(41д
33)4(3пк)2(1пк)2(31д
22)2(1пк2д
1112п1д
(5.24)
где обозначено: М
пк1(2)
= М
пк1
+ М
пк2
;F
д31(2)
= М
пк1(2)
[1/R
к1(2)
]
к1(2)
; F
пк1(2)
=
F
пк1
+ F
пк2
; F
пк3(4)
= F
пк3
+ F
пк4
; М
д41(2)
= F
пк3(4)
R
к3(4)
к3(4)
; М
пк3(4)
= М
пк3
+
М
пк4
.
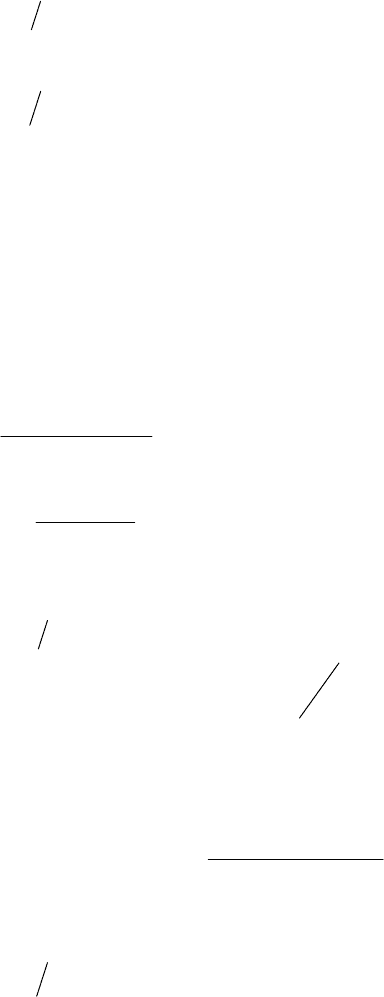
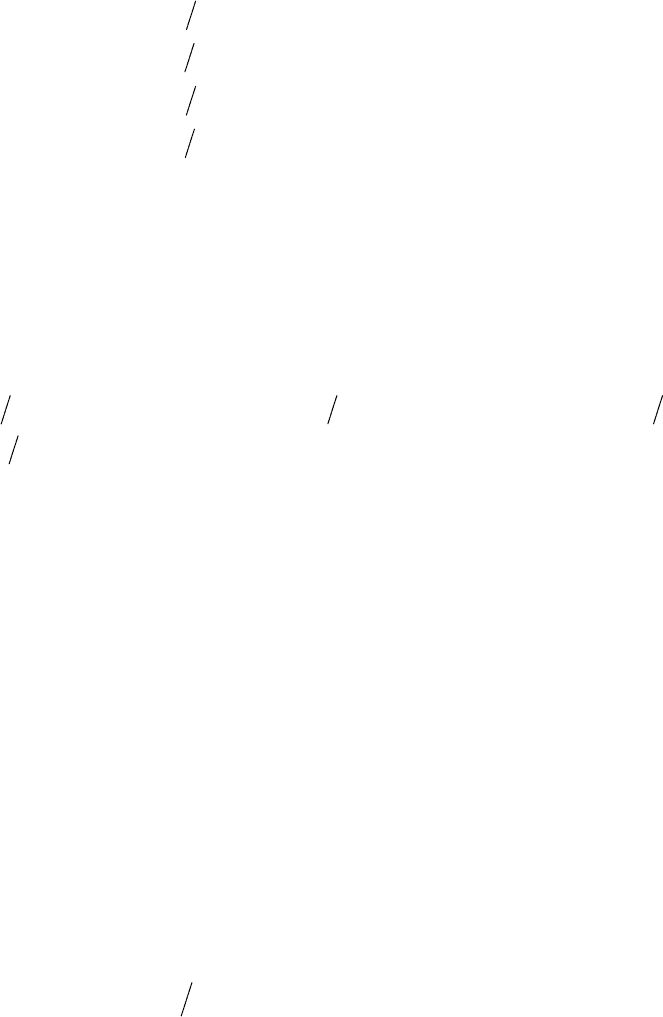
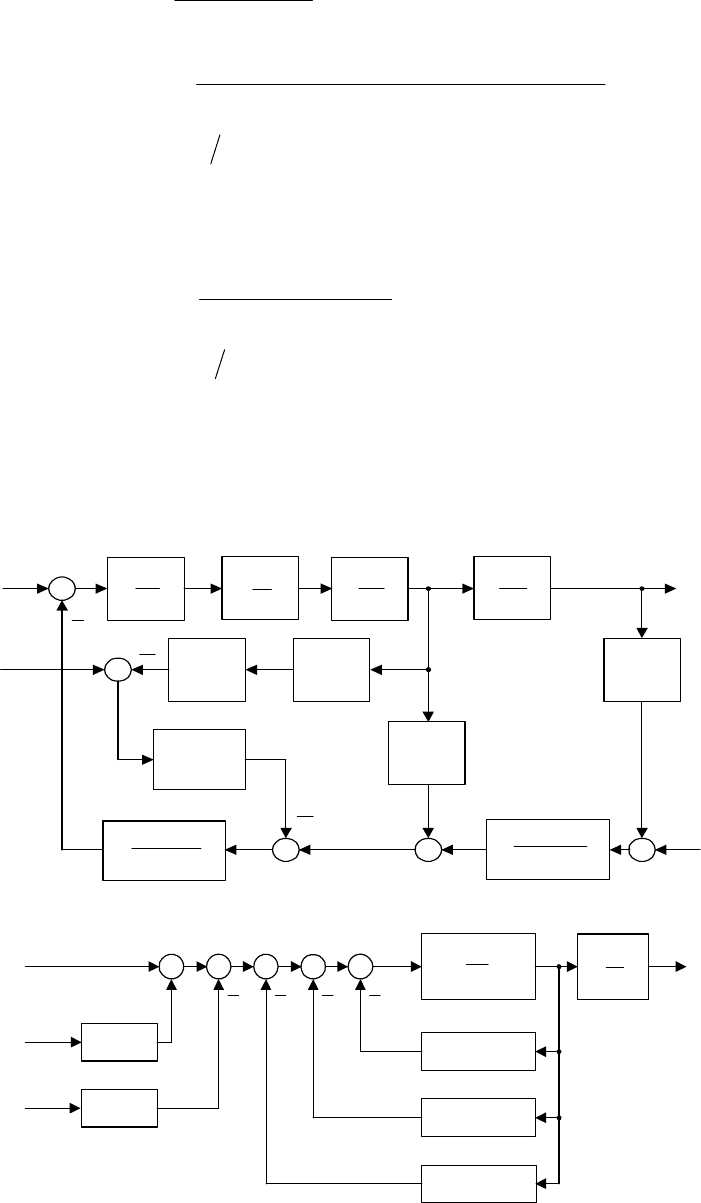
По выражению (5.24) может быть построена структурная схема
рассматриваемого преобразователя. Для этой цели представим это
выражение в виде:
.Rv
,МpJМ
,
R
1
МF
,Rv
,FFvpmF
,
1
RFМ
,i
,МwpJМ
,
i
М
М
,
pJ
ММ
)4(3к34
)4(3пк44)2(41д
)4(3к)4(3к
)2(41д)4(3пк
)2(1к23
)4(3пк)2(1пк33)2(31д
)2(1к
)2(1к)2(31д)2(1пк
1212
)2(1пк222д
1212
2д
12п
1
12п1д
1
(5.25)
246
Развернутая структурная схема, соответствующая уравнениям
выражения (5.25), представлена на рис. 5.21, а.
а)
б)
в) г)
Рис. 5.21
1
1
J
p
1
12
1
i
1д
M
1
w
2
w
1212
1
i
pJ
2
)2(1
)2(1
к
к
R
)2(1к
R
pm
3
3
v
)2(1пк
F
)4(3)4(3
1
кк
R
)4(3
1
к
R
4
w
pJ
4
)4(3пк
M
е
22
JK
J
33
mK
m
p
1
)2(1пкF
K
)2(1пк
F
1д
M
1
w
1
1
J
)4(3пкF
K
)4(3пк
M
44
JK
J
пр
J
1
p
1
нпр
M
1д
M
1
w
1д
M
нпр
M
1
w
пр
J
247
После переноса воздействий F
пк1(2)
и М
пк3(4)
на вход структуры,
исключения дифференцирующих звеньев (рис. 5.21, б), где обозначено:
)2(1к1212
)2(1к
)2(1пкF
i
R
K
ηη
,
)4(3к)2(1к1212
)4(3пкМ
i
1
K
ηηη
,
,2Gk4Gk4GkМММ
,
2
G
R
k
R
4Gk
R
4Gk
FFF
434пк3пк)4(3пк
к2к
2
1к
1
2пк1пк)2(1пк
(здесь k = k
1
= k
2
= k
3
= k
4
), объединения внешних воздействий и свертывания
замкнутых контуров получаем эквивалентную одномассовую модель (рис.
5.28, в, г) с приведенными к переменной
1
моментом инерции и моментом
статического сопротивления
,GKKFKММ
;mKJKJKJJ
Мнпр)2(1пкF)2(1пк)4(3пкМ)4(3пкнпр
33m44J22J1пр
где
1K
1J
,
12
2
12
2J
i
1
K
η
,
)4(3к)2(1к12
2
12
4J
i
1
K
ηηη
,
)2(1к12
2
12
2
1к
3m
i
R
K
ηη
,
1
1
i
2k
K
)4(3к)2(1к1212
Mннп
ηηη
,
)4(3к)4(3к)2(1к1212
1к
)4(3пкМ
Ri
R
K
ηηη
,
)2(1к1212
1к
)2(1пк
i
R
F
ηη
.
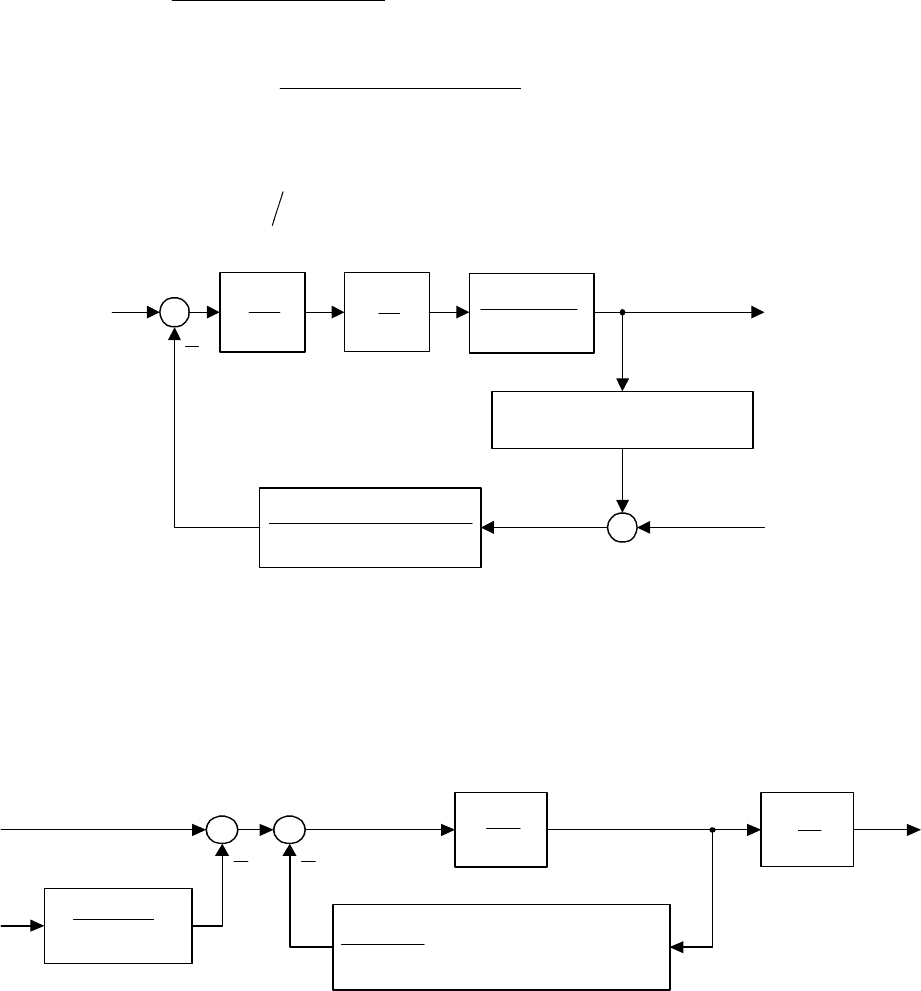
Теперь рассмотрим модель МП транспортной тележки с линейным
асинхронным двигателем (рис. 5.22, а). Механической части этого
преобразователя соответствует расчетная схема, представленная на рис. 5.22,
б.
248
а)
б)
Рис. 5.22
Исходными уравнениями этой пятимассовой модели являются
дифференциальные уравнения движения масс
,pJММ
,pJММ
,pJММ
,pJММ
,vpmFF
555п5д
444п4д
333п3д
222п2д
111п1д
(5.26)
1
v
1п
F
1д
F
1
m
2д
M
1пк
M
2
w
2
J
3пк
M
22
,
кк
R
33
,
кк
R
4д
M
4
w
4
J
3д
M
2пк
M
3
w
3
J
5д
M
4пк
M
5
w
5
J
11
,
кк
R
44
,
кк
R
1пк
F
2пк
F
3пк
F
4пк
F
1д
F
)4,3,2(1к
F
1
v
)5,4,3(2д
M
)4,3,2(1пк
M
)5,4,3(2
w
)4,3,2(1)4,3,2(1
,
кк
R
1
m
5432
JJJJ
249
уравнения их связи и уравнения соотношения скоростей
.Rv
,Rv
,Rv
,Rv
,RFМ
,RFМ
,RFМ
,RFМ
4к15
3к14
2к13
1к12
4к4к4пк5д
3к3к3пк4д
2к2к2пк3д
1к1к1пк2д
(5.27)
В приведенных уравнениях: F
д1
– движущее электромагнитное усилие
линейного электродвигателя; F
п1
= F
пк1
+ F
пк2
+ F
пк3
+ F
пк4
– суммарное
статическое усилие сопротивления движению тележки; F
пк1
, F
пк2
, F
пк3
, F
пк4
–
усилия сопротивления ходовых колес; М
д2
; М
д3
; М
д4
; М
д5
;
2
= v
1
/ R
k1
;
3
= v
1
/ R
k2
;
4
= v
1
/ R
k3
,
5
= v
1
/ R
k4
– движущие моменты, приложенные к
вращающимся массам и угловые скорости вращения масс;
4GkММ
11пк2п
,
4GkММ
22пк3п
,
4GkММ
33пк4п
,
4GkММ
44пк5п
моменты сопротивления движению ходовых колес
транспортной тележки, где k
1
, k
2
, k
3
, k
4
– коэффициенты трения качения
колес; R
к1
, R
к2
, R
к3
, R
к4
– радиусы ходовых колес; G – сила тяжести
транспортируемого груза и тележки;
к1
,
к2
,
к3
,
к4
– коэффициенты,
учитывающие потери от трения в цапфах и трения реборд ходовых колес о
рельсы.
Приняв, как и ранее, R
к1
= R
к2
= R
к3
= R
к4
и
к1
=
к2
=
к3
=
к4
, имеем
,Rv
,RF
RFRF
RFМ
,p)JJJJ(
ММ
,vpmFF
)4,3,2(1к1)5,4,3(2
4к4к4пк
3к3к3пк2к2к2пк
1к1к1пк)5,4,3(2д
)5,4,3(25432
)4,3,2(1пк)5,4,3(2д
11),4,3,2(1пк1д
(5.28)
250
где обозначено F
пк1(2,3,4)
= F
пк1
+ F
пк2
+ F
пк3
+ F
пк4
; М
пк1(2,3,4)
= (k
1
+ k
2
+ k
3
+
+k
4
)(G/4)=kG. Последним уравнениям соответствует двухмассовая
структура преобразованной расчетной модели, изображенная на рис. 5.22, б.
Перепишем (5.37) в виде, удобном для формирования структурной
схемы (рис. 5.32, а):
.Rv
,Мp)JJJJ(М
,
R
М
F
,
pm
FF
v
)4,3,2(1к1)5,4,3(2
)4,3,2(1пк)5,4,3(25432)5,4,3(2д
)4,3,2(1к)4,3,2(1к
)5,4,3(2д
)4,3,2(1пк
1
),4,3,2(1пк1д
1
(5.28)
Рис. 5.23, а
После ряда структурных преобразований схемы рис. 5.23, а получаем
эквивалентную одномассовую модель (рис. 5.23, б, в) с приведенными
воздействием F
нпр
и массой m
1пр
.
Рис. 5.23, б
1
1
m
p
1
)4,3,2(1
1
к
R
1д
F
1
w
)5,4,3(2
w
)4,3,2(1)4,3,2(1
1
кк
R
pJJJJ
)(
5432
)4,3,2(1пк
M
)(
1
5432
2
JJJJ
R
кк
p
1
кк
R
k
G
1д
F
1
v
1
1
m
251
в) г)
Рис. 5.23
Из детализированной структуры рис. 5.23, б находим выражения
m
1пр
= m
1
+ K
J2(3,4,5)
(J
2
+ J
3
+ J
4
+ J
5
); F
нпр
= K
F
G,
где
к
2
к
)5,4,3(2J
R
1
K
η
,
кк
F
R
k
K
η
коэффициенты приведения
одномассовой модели.
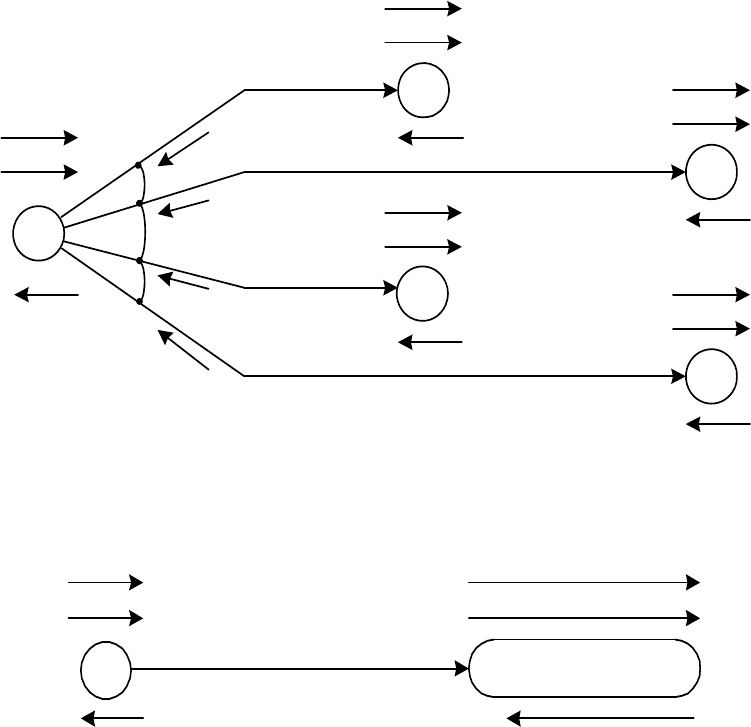
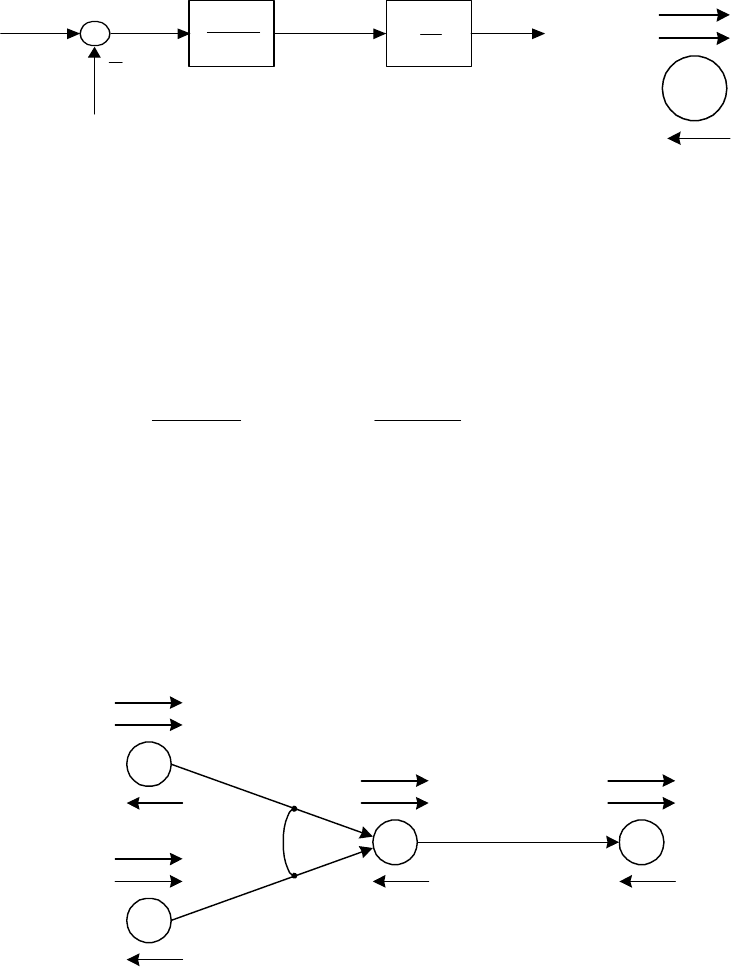
Ниже формируются модели МП широко применяемого
двухдвигательного электропривода. Рассмотрим систему двухдвигательного
электропривода (сходящаяся структура механической цепи),
представляющего собой четырехмассовую взаимосвязанную механическую
систему с жесткими линейными механическими связями.
Рис. 5.24
Для расчетной модели этого преобразователя (рис. 5.24) справедлива система
дифференциальных и алгебраических уравнений при передаче энергии от двух двигателей
к одному исполнительному органу
пр
m
1
1
p
1
нпр
F
1д
F
1
v
1д
F
нпр
F
1
v
пр
m
1
2д
M
2п
M
2
w
3д
M
3п
M
3
w
2323
,
i
2
J
3
J
1д
M
1п
M
1
w
1
J
1313
,
i
4д
M
н
M
4
w
4
J
3434
,
i
252
.i
,i
,i
,iMМ
,iMiMМ
,
dt
d
JMМ
,
dt
d
JMМ
,
dt
d
JMM
,
dt
d
JMM
3434
3232
1313
34343n4д
23232n13131n3д
4
4н4д
3
33n3д
2
22п2д
1
11п1д
(5.30)
После исключения из (5.30) переменных М
д3
и М
д4
и перехода к
изображениям получим:
.i
,i
,i
,pJMiM
,pJMiMiM
,pJMM
,pJMM
3434
3232
1313
44н34343n
333n23232n13131n
222п2д
111п1д
(5.31)
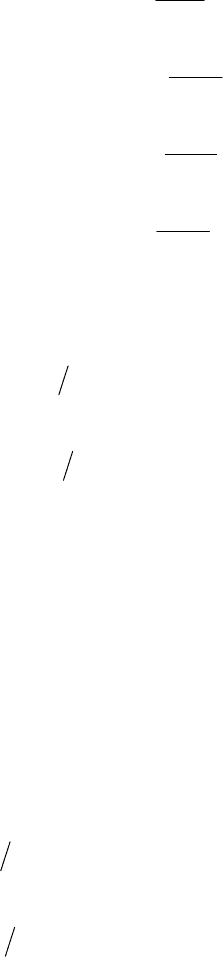
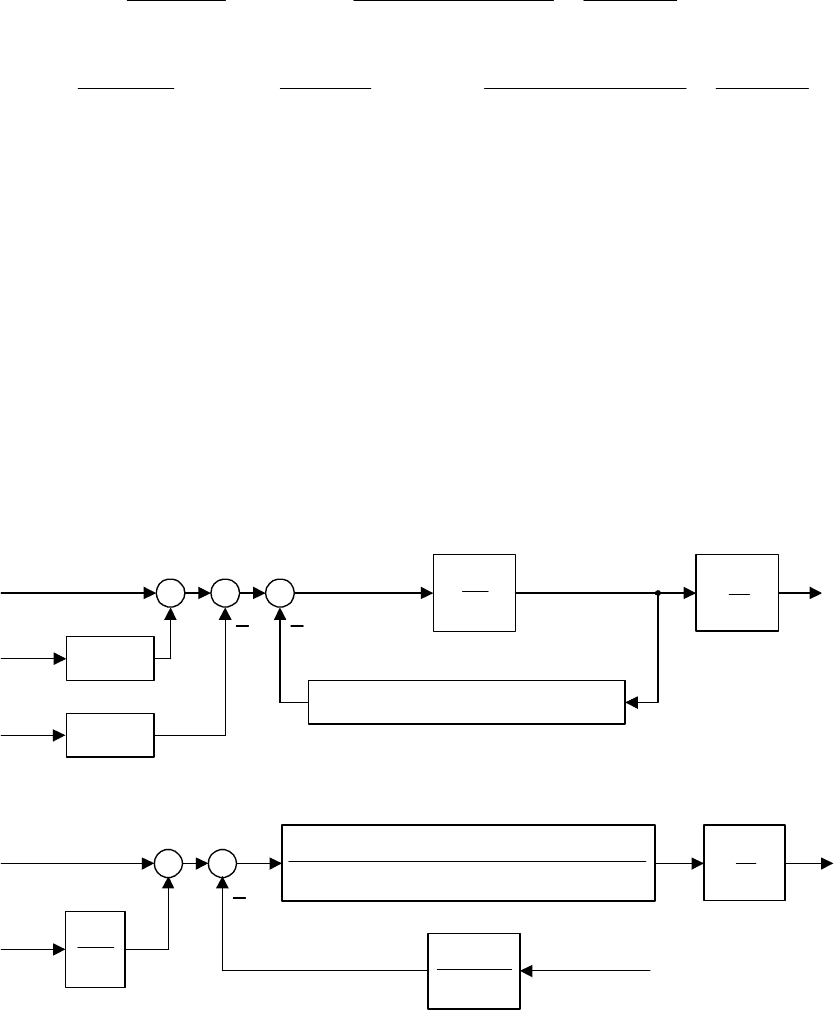
Для формирования структуры преобразователя двухдвигательного
электропривода уравнения (5.31) представим в виде
253
.i
,
i
MpJ
M
,i
,pJMM
,i
,
i
iMMwpJ
M
,
pJ
MM
3434
3434
н44
3n
3232
222д2n
1313
1313
23232n3n33
1n
1
1n1д
1
(5.32)
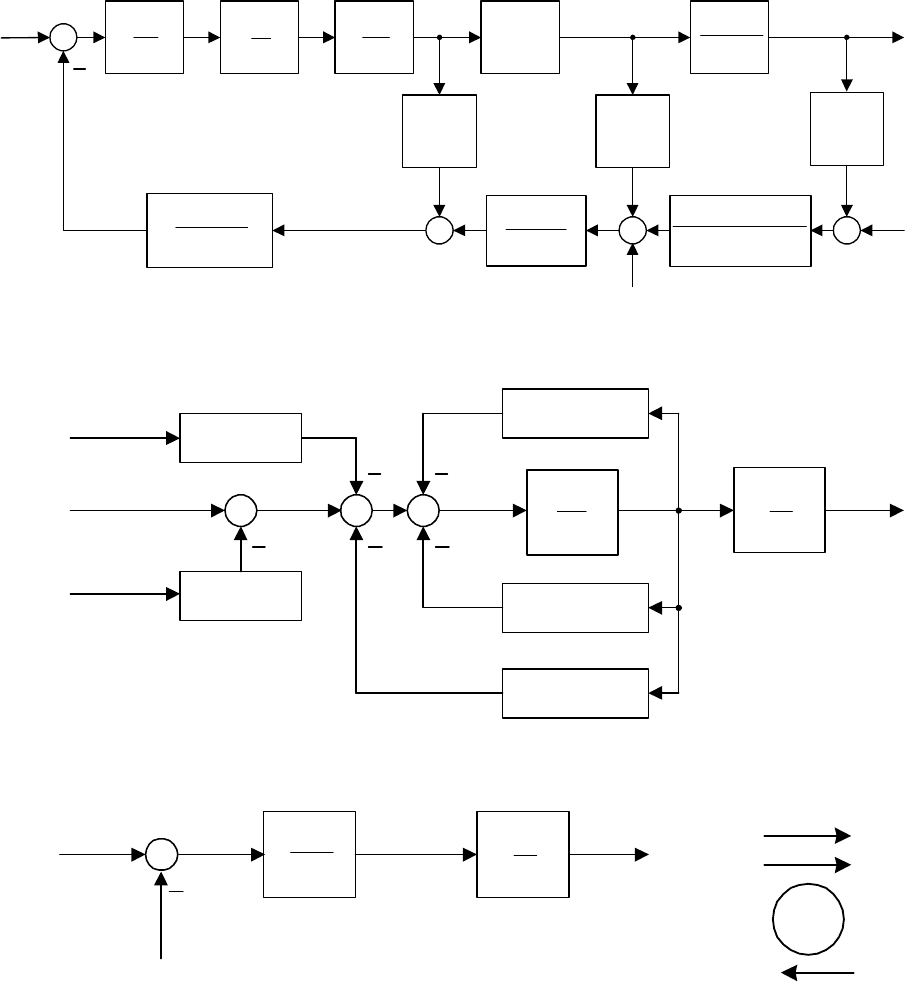
По системе уравнений (5.32) составлена детализированная структурная
схема рис. 5.25, а.
а)
б)
Рис. 5.25.
1
1
J
p
1
13
1
i
1д
M
1
w
3
w
1313
1
i
3434
1
i
pJ
4
4
w
34
1
i
23
ipJ
2
pJ
3
2д
M
2323
i
н
M
2
w
22
JK
J
p
1
2Mд
K
2д
M
1д
M
1
w
1
1
J
33
JK
J
44
JK
J
Mн
K
н
M
254
Теперь перейдем к рассмотрению операций приведения. Для приведения
системы к переменной
1
(валу двигателя Д
1
) примем за входное воздействие
М
д1
, а за выходную переменную
1
, тогда исходную развернутую структуру
представим в виде базовой четырехмассовой модели (рис. 5.25, б). На этой
схеме обозначено:
1313
2323
2д
M
i
i
K
η
η
;
141414141313
н
M
i
1
ii
1
K
ηηη
; 1K
1
J
;
13
2
13
23
2
23
2
J
i
i
K
η
η
;
13
2
13
3
J
i
1
K
η
;
14
2
1434
2
3413
2
13
4
J
i
1
ii
1
K
ηηη
.
Заметим, что в преобразователе рассматриваемого электропривода
i
13
= i
23
, поэтому выражения для К
Мд2
и К
J2
упростятся: К
Мд2
=
23
/
13
, К
J2
=
23
/
13
. В частном случае (при
23
=
13
) К
Мд2
= К
J2
= 1.
Структуру (рис. 5.25, б), после объединения трех отрицательных
обратных связей в одну (рис. 5.26, а) и свертывания замкнутого контура (рис.
5.26, б), можно представить в виде одномассовой эквивалентной модели (рис.
5.37, в, г). Из структуры рис. 5.26, б находим:
44J33J22J1np
JKJKJKJJ
,
2д
2д
Mnp2д
MKM
,
н
н
Mнnp
MKM
.
а)
б)
Рис. 5.26
443322
JKJKJK
JJJ
p
1
2Mд
K
2д
M
1д
M
1
w
1
1
J
Mн
K
н
M
4433221
1
JKJKJKJ
JJJ
p
1
13
23
2д
M
1д
M
1
w
1414
1
i
н
M