Тимофеев В.Н. (ред.) Применение магнитогидродинамических устройств в металлургии
Подождите немного. Документ загружается.

79
параметров при использовании таких компьютерных пакетов, как
SIMULINK.
В предлагаемой работе изложены основы синтеза структурных схем и
математических моделей в переменных состояния [19] для таких элементов
электромеханической системы, как электрические цепи, трансформаторы,
индукционные машины с разомкнутыми и замкнутыми магнитопроводами,
типовые системы управления электроприводами, а также кинематические
передачи. Сформулированы методические приемы преобразования
структурных
схем к детализированным. Приведены многочисленные
примеры исследования переходных процессов в электромеханических
системах и их элементах. Материал изложен в последовательности, удобной
для практического освоения предлагаемых принципов моделирования
электромеханических систем, в том числе с использованием программы
SIMULINK.
Глава 1
СТРУКТУРНЫЙ СИНТЕЗ ДИНАМИЧЕСКИХ МОДЕЛЕЙ
ЭЛЕКТРОТЕХНИЧЕСКИХ УСТРОЙСТВ
1.1. Описание структурного метода
Теория цепей является одним
из важнейших разделов теоретической
электротехники, в рамках которой рассматриваются основополагающие для
многих прикладных дисциплин способы описания процессов в
электрических цепях, а также методы синтеза динамических моделей и их
математического моделирования на ЭВМ.
При решении задач динамики на ЭВМ обычно используется два
принципиально различных подхода [13]. В первом применяется чисто
математическое моделирование исследуемой
системы дифференциальных
уравнений без отражения в модели реальной структуры объекта. Во
втором расчетная модель формируется в соответствии со структурной
схемой исследуемой системы (так называемое структурное моделирование).
Отметим, что метод чисто математического моделирования
относительно прост, но имеет ряд существенных недостатков, особенно ярко
проявляющихся при моделировании сложных электротехнических систем
(ЭТС). Основные из
них: невозможность использования при компоновке
схемы расчетной модели результатов предварительной работы по
составлению структурной схемы проектируемой ЭТС; получение
переходного процесса, как правило, по одной переменной и в связи с этим
отсутствие информации о других регулируемых координатах системы;
трудность отыскания ошибок в работе системы.
Отметим также, что во многих специальных дисциплинах (
теория
электропривода, системы управления электроприводами,
80
электротехнологические системы и устройства и др.) для синтеза моделей и
анализа динамических процессов в сложных электромеханических системах
широко используется аппарат структурных схем, в том числе и
детализированных (развернутых).
В связи с этим наибольшее распространение при исследовании ЭТС
получил метод структурного моделирования [3]. При этом структурная
схема представляется состоящей из типовых динамических звеньев
и
является математической моделью реальной цепи или системы, наглядно
отражающей тип динамических звеньев и характер связей между ними, а
также направление и последовательность преобразования сигналов
информационо-управляющих и энергетических каналов ЭТС.
При структурном методе значительно упрощается контроль работы
модели, так как в модели, отражающей структуру реальной системы, все
сигналы соответствуют
реальным переменным и по характеру их изменения
в статике и динамике можно судить о степени достоверности модели.
Следует отметить и такие дополнительные преимущества динамических
моделей, построенных на основе развернутых структурных схем:
возможность использования стандартных схем моделей линейных и
нелинейных элементов ЭТС, а также моделей типовых динамических
звеньев; удобство проверки правильности
формирования отдельных узлов
модели, так как переходные характеристики каждого типового звена
заранее известны; возможность оценки динамических процессов в различных
специальных и аварийных режимах функционирования проектируемой
системы.
Так как составление структурной схемы является отправным моментом
при исследовании ЭТС структурными методами, то при формировании
динамических моделей цепей и устройств возникает задача преобразования
исходных
структурных схем. При этом все структурные преобразования
исходной модели направлены в основном на объединение последовательно
и параллельно соединенных звеньев, свертывание контуров, устранение
перекрестных связей по переменным и их производным и замкнутых
безынерционных контуров, исключение из структуры дифференцирующих
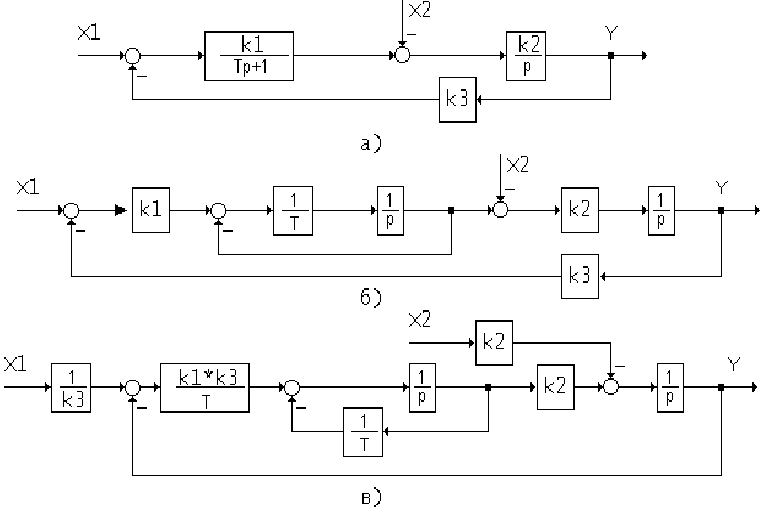
звеньев, а также формирование из исходной структурной схемы (например,
рис. 1.1, а) ее детализированного
эквивалента (рис. 1.1, б) и модели в
переменных состояния (рис. 1.1, в).
81
Рис. 1.1
82
Основные способы синтеза динамических моделей на основе
структурного метода кратко излагаются в следующем параграфе настоящей
главы, а подробные рекомендации по составлению структурных схем, их
преобразованию, а также некоторые другие вопросы, связанные с
формированием моделей различных элементов и цепей электротехнических
установок для целей структурного моделирования, детально освещаются в
последующих главах работы.
1.2. Синтез динамических моделей цепей
Синтез динамических моделей элементов и цепей электротехнической
системы может быть произведен с использованием различных подходов.
Остановимся подробнее на некоторых из встречающихся в литературе.
Формирование модели по передаточным функциям структурных схем.
При использовании этого способа модель исходной цепи или звена
представляется в виде структурной схемы. Решение же
задачи заключается в
преобразовании типовых передаточных функций элементов общей
структурной схемы модели в эквивалентные детализированные
(развернутые) структуры, состоящие из интеграторов с единичными
постоянными времени и безынерционных элементов.
Приведем несколько примеров составления развернутых схем моделей
некоторых передаточных функций динамических звеньев.
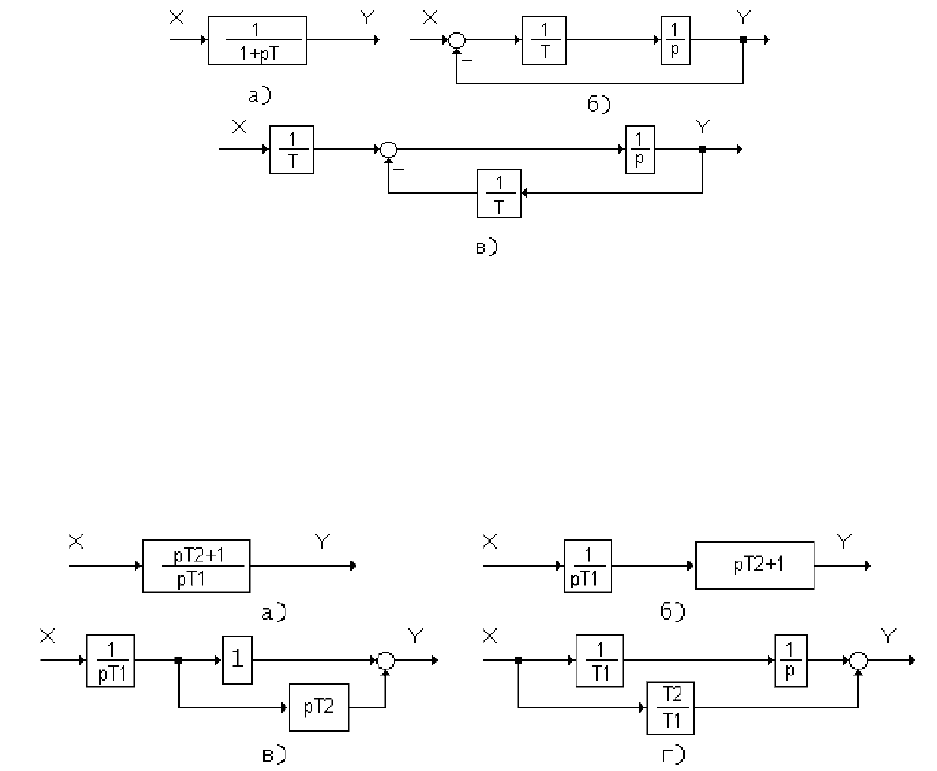
Схема модели апериодического звена. В качестве первого примера
возьмем передаточную функцию
апериодического звена
W(p) = Y(p)/X(p) = 1/(1+pT), (1.1)
или
W(p) = (1/pT){1/[1+(1/pT)1]}. (1.2)
Нетрудно заметить, что в (1.2) выражение 1/pT соответствует
передаточной функции прямого канала, а (1/pT)1 - передаточной функции
замкнутой цепи, равной произведению передаточных функций прямого
канала и канала отрицательной обратной связи с единичным коэффициентом
передачи.
Систему с передаточной функцией (1.2) можно представить в виде
детализированной структурной схемы
, приведенной на рис. 1.2, в,
эквивалентной исходной структуре звена (рис. 1.2, а). Развернутая
структура (рис. 1.2, б) легко приводится к модели в переменных состояния
(рис. 1.2, в)[19].
83
Структура модели пропорционально-интегрирующего звена.
Передаточную функцию этого звена
W(p) = (pT
2
+1)/pT
1
(1.3)
Рис. 1.2
можно представить в виде структурных схем, изображенных на рис.
1.3, а и 1.3, б. После преобразований имеем модель в переменных состояния,
показанную на рис.1.3, г.
Рис. 1.3
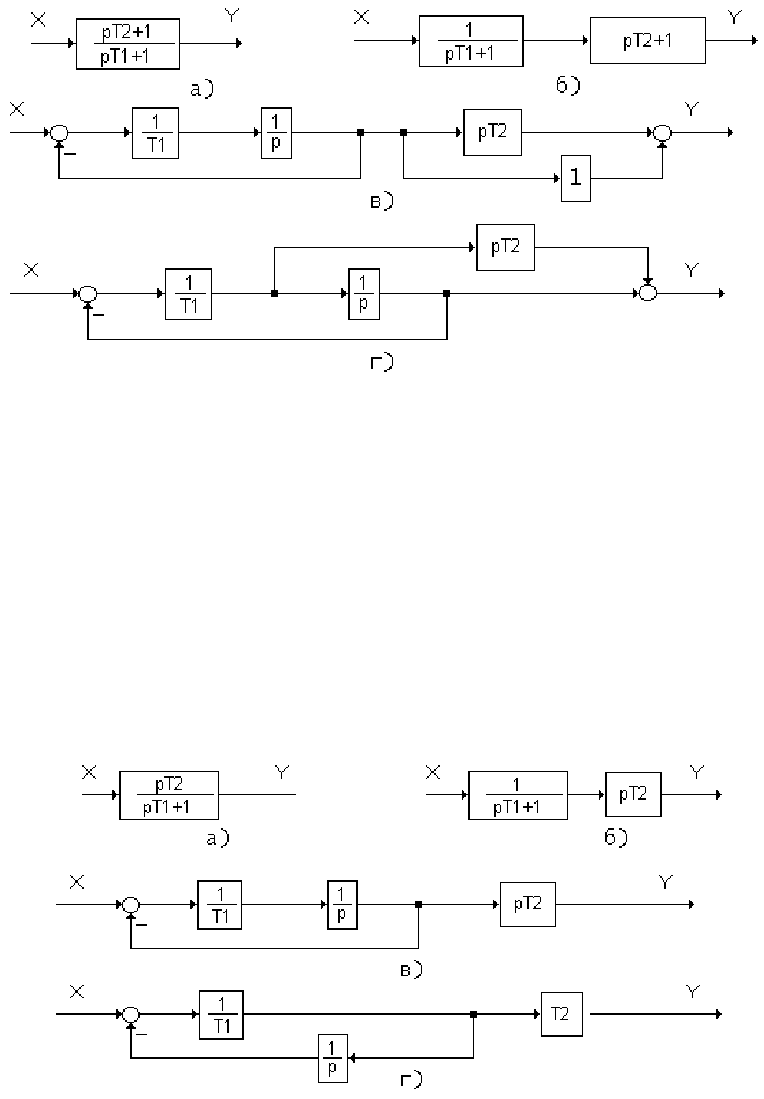
Схема модели интегро-дифференцирующего звена. Составим модель
интегро-дифференциального звена с передаточной функцией
W(p) = (pT
2
+1)/(pT
1
+1). (1.4)
Такое звено представляется структурными схемами, изображенными на
рис. 1.4, а и 1.4, б. После преобразований последней структуры находим
модель в переменных состояния (рис.1.4, г).
84
Рис.1.4
Схема модели дифференцирующего звена. Передаточную функцию
звена
W(p) = pT
2
/(pT
1
+1) (1.5)
сначала представим в виде структурных схем, изображенных на рис.1.5, а
и 1.5, б, а затем в виде модели в переменных состояния (рис. 1.5, г).
Рис. 1.5
85
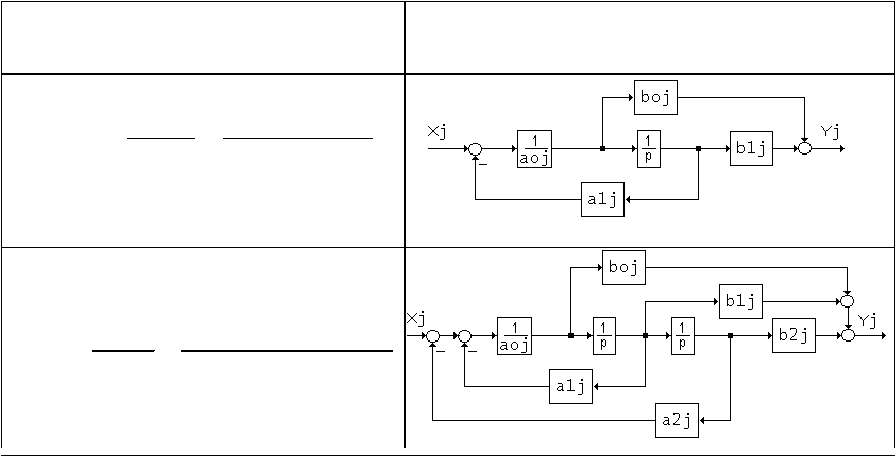
Все перечисленные варианты звеньев первого порядка обычно
записывают в виде обобщенной передаточной функции
W
j
(p) = (b
oj
p+b
1j
)/(a
oj
p+a
1j
) (1.6)
и представляют развернутой структурной схемой, показанной в
табл. 1.1.
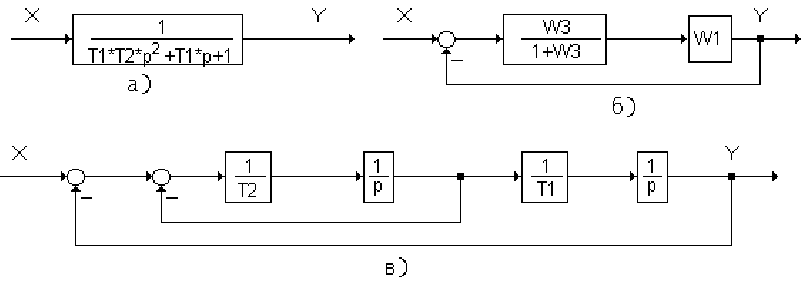
Аналогично рассмотренному выше отразим этапы формирования
динамической модели звена второго порядка с передаточной функцией
W(p) = 1/(T
1
T
2
p
2
+T
1
p+1), (1.7)
которой соответствует структурная схема рис. 1.6, а.
Представим (1.7) в виде
W(p) = W
1
(p)W
2
(p)/[1+W
1
(p)W
2
(p)],
или иначе W(p) = W
4
(p)/[1+W
4
(p)], (1.8)
где W
1
(p) = 1/(T
1
p); W
2
(p) = 1/[(T
2
p)+1];
W
3
(p) = 1/(T
2
p); W
4
(p) = W
1
(p){W
3
(p)/[1+W
3
(p)]}.
Структурная схема, соответствующая последнему уравнению,
представлена на рис. 1.6, б. После подстановки выражений передаточных
функций W
1
(p), W
2
(p) и W
3
(p) в (1.8) получаем модель в переменных
состояния (рис. 1.6, в).
Рис. 1.6
86
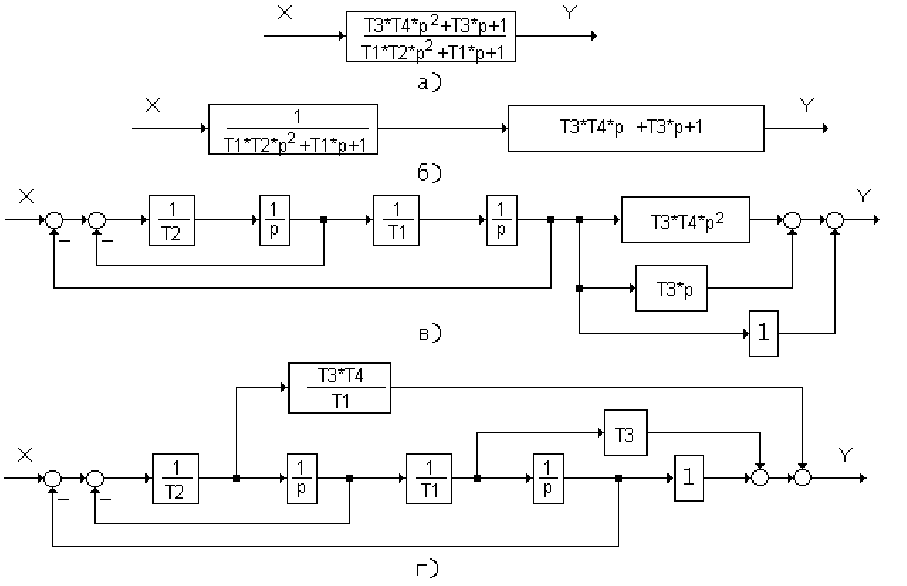
Для реализации модели звена с передаточной функцией
W(p) = (T
3
T
4
p
2
+T
3
p+1)/(T
1
T
2
p
2
+T
1
p+1) (1.9)
его исходную структурную схему (рис. 1.7, а), представим в виде,
показанном рис. 1.7, в. После исключения дифференцирующих звеньев
окончательно имеем модель, представленную на рис. 1.7, г.
Рис. 1.7
Передаточная функция обобщенного звена второго порядка
определяется (табл. 1.1) выражением
W
j
(p) = (b
oj
p
2
+b
1j
p+b
2j
)/(a
oj
p
2
+a
1j
p+a
2j
). (1.10)
Отметим, что выражение (1.10) является обобщением следующих
типовых звеньев:
колебательного W(p)=1/(T
1
T
2
p
2
+T
1
p+1),
консервативного W(p)=1/(T
1
T
2
p
2
+1),
интегрирующего инерционного W(p)=1/[T
2
p(T
1
p+1)],
изодромного второго порядка W(p)=(T
3
T
4
p
2
+T
3
p+1)/(T
1
T
2
p
2
),
87
а также различных форсирующих
W(p) = (T
3
T
4
p
2
+T
3
p+1)/(T
1
T
2
p
2
+T
1
p+1),
W(p) = (T
3
p+1)/(T
1
T
2
p
2
+T
1
p+1),
W(p) = (T
3
T
4
p
2
+T
3
p+1)/[T
2
p(T
1
p+1)].
В общем случае синтез моделей в переменных состояния по данному
способу предусматривает выполнение следующей последовательности
операций:
1. Составление системы интегро-дифференциальных уравнений
рассматриваемой цепи.
2. Запись исходной системы уравнений в операторной форме при
нулевых начальных условиях и ее аналитическое преобразование.
3. Представление модели цепи в виде структурной схемы, состоящей в
общем
случае из комбинации типовых элементарных динамических звеньев,
охваченных различными обратными связями.
4. Преобразование структурной схемы в развернутую, а затем в модель
в переменных состояния.
При выполнении последнего этапа по этому способу часто используют
известные детализированные структуры (табл. 1.1) обобщенных
передаточных функций типовых элементарных звеньев первого и
второго порядка.
Таблица 1.1
Передаточная
Структура
функция звена модели
Динамическая модель объекта в переменных состояния, имеющего один вход
и один выход и описываемого передаточной функцией более высокого
порядка
apa
bpb
(p)X
(p)Y
(p) W
1joj
1joj
j
j
j
2j1j
2
oj
2j1j
2
oj
j
j
j
apapa
bpbpb
(p)X
(p)Y
(p)W
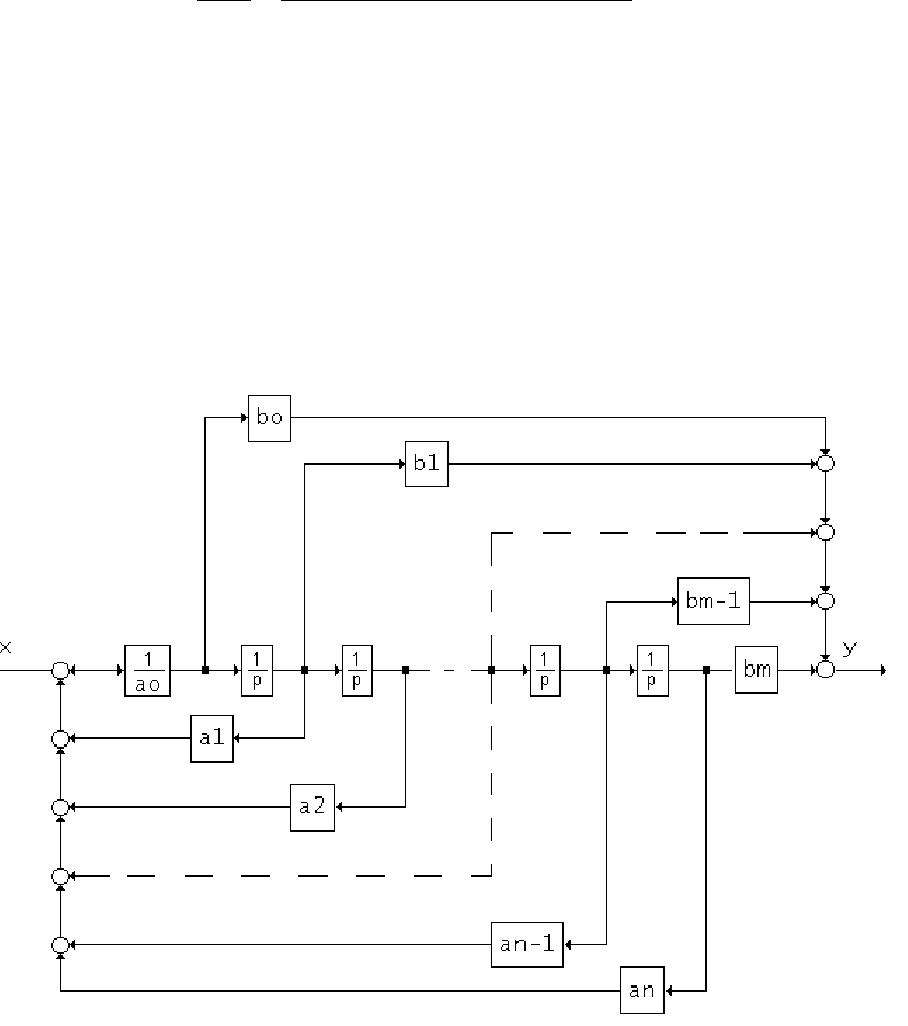
88
формируется на основе известной алгоритмической структуры, показанной
на рис. 1.8.
Синтез модели по уравнениям соединений и уравнениям элементов
цепи (второй способ). Развернутая динамическая модель цепи может быть
получена также с помощью двух систем уравнений: уравнений соединений,
которые определяются топологией цепи и устанавливают связи между
токами и напряжениями ее отдельных элементов, и
уравнений элементов,
связывающих ток и напряжение каждого отдельного элемента.
Рис. 1.8
Этот способ предусматривает следующие этапы синтеза:
1. Составление двух систем уравнений цепи.
1),n(m
a...papa
b...pbpb
)p(y
)p(x
)p(W
n
m
1n
1
n
0
1m
1
m
0