Teodorescu P.P. Mechanical Systems, Classical Models Volume II: Mechanics of Discrete and Continuous Systems
Подождите немного. Документ загружается.

Finally, the equation (17.1.34) takes the form
22
0
030
2
22 2
cos cos cos cos
21
2
sin sin
I
Mgl
MglJ
JMl
X
RR RR
R
RR
−−
§·
=−
¨¸
+
©¹
.
(17.1.38)
From the first equation (17.1.37) it results that
0
cos cosRR> , while the relation
(17.1.38) shows that one must have
()
22 2
00
3
cos cos / 2 sin 1IMglJXR R R−<. If, at the
initial moment, we impart to the gyroscope a very great rotation
0
X , then we must have
−<<
0
cos cos 1RR; taking
=+
0
RR R
,
<< 1R
, it results
0
cos cosRR−
()
0
cos 1 cosRR=−
00
sin sin sinRRRR+≅ and ≅
0
sin sinRR. The equation
(17.1.38) becomes
()
=−
2
1RMR NR
,
(17.1.38')
where
0
22
0
2sin
sin
Mgl
JMl
R
M
R
=
+
,
22
0
3
0
2sin
I
MglJ
X
N
R
=
,
(17.1.38'')
with the initial condition
(0) 0R = . By integration, using a substitution of the form
=
2
sin zNR
, we get
()
2
11
sin
2
tRMN
N
= ,
(17.1.38''')
whence
==
22
max
030
1/ 2 sin /MglJ IRN RX has a small value. As in Chap. 15,
Sect..2.1.2, to can appreciate easier the mode in which the motion of the gyroscope is
obtained and to determine easier its position, we consider the motion on the unit sphere
of centre
C of the piercing point of the movable axis
3
Cx with the very same sphere;
one obtains thus, in the motion of nutation, a curve contained in the interior of the
spherical zone bounded by the circles
=
0
RR
and =+
max
0
RR R , the latter one being
the inferior circle. The period of motion is given by
22/QMN⋅
()
22
030
4sin/JJ Ml IQRX=+ , being as much smaller as the initial angular
velocity
0
X is greater. We notice that, in fact, the period of motion is in inverse
proportion to
0
X , while the amplitude of the motion (see the formula (17.1.38''')) is in
inverse proportion to
2
0
X . From the first equation (17.1.37) we get, analogously,
()
0
3
2
00
3
21
sin
sin 2
I
Mgl
t
JI
X
ZR MN
RX
==
,
(17.1.39)
MECHANICAL SYSTEMS, CLASSICAL MODELS
484
wherefrom, by integration,
()
0
0
3
1
() sin
Mgl
tt t
I
ZMNZ
X
MN
ªº
=− +
«»
¬¼
.
(17.1.39')
Observing that
0
0X >
, the meridian plane being rotated in the same sense, it results
that the rotation axis of the gyroscope performs a motion of precession with an angular
velocity, which varies periodically between the value zero and a maximal value
max
0
3
2/Mgl IZX=
. The curve described in the motion of nutation on the unit sphere
between the circles
=
0
RR and =+
max
0
RR R is of the nature of the curve in
Fig. 15.21c, from the corresponding Lagrange-Poisson motion, having cuspidal points
for
=
0
RR
and being tangent to the circle =+
max
0
RR R . Indeed, if V is the angle
made by this curve with a meridian circle, then we may write (see Sect. 15.2.1.2 too)
()
2
2
00
0
d1 1
tan sin sin 1 sin tan
dsin 2
Ml
Vt
J
ZZ
RR RMN
RR
R
=≅= +
. (17.1.40)
For
=
0
RR we have = 0R , while – if we take into account (17.1.38''') – it results
=tan 0V , hence cuspidal points; for →+
max
0
RRR one obtains →∞tanV , the
curve being normal to the meridian circle.
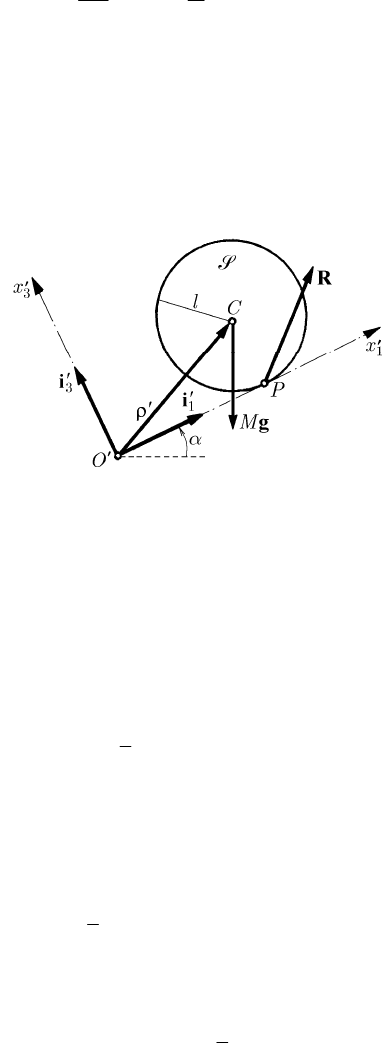
The point
P describes an analogous curve in the plane P (Fig. 17.9).
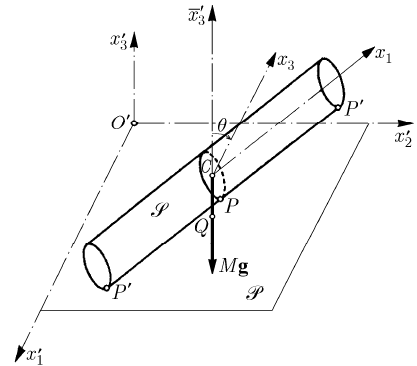
17.1.2.6 Frictionless Motion of a Homogeneous Rigid Solid of Cylindrical Form
on a Fixed Horizontal Plane
We consider, analogously, a homogeneous rigid solid S of cylindrical form, which lays
on a fixed horizontal plane
P along a generatrix PP
′′
. The fixed frame of reference
′
R
is linked to the plane P, the
′′
3
Ox -axis being normal to it, in the part in which is
the solid
S . The movable frame R is chosen so that the axes
23
,Cx Cx be in the
median transverse section, which attains the plane
P at the point P; the
1
Cx
-axis is
taken parallel to the generatrices of the cylinder (Fig. 17.10). The applicate
′
=
3
CQ S
of the centre
C will be given by a relation of the form (17.1.28) too. We also notice that
the
1
Ox
-axis is contained in the plane
12
Cx x
(we use also a frame of reference
R
, the
axes of which are parallel to the axes of the frame
′
R
), so that Euler’s angle is
= 0K
; the relations (5.2.35) become
1
XR=
,
2
sinXZR=
,
3
cosXZR=
.
(17.1.41)
The own weight
Mg and the constraint forces along the generatrix
′′
PP
are along
the direction of the
′′
3
Ox -axis. From the theorem of motion of the mass centre, as in the
preceding cases, it results that the point
Q has a rectilinear and uniform motion in the
17 Dynamics of Systems of Rigid Solids
485
plane P ; analogously, we can reduce the general case to the case in which the point Q
is fixed. Observing that the moment of the given and constraint external forces with
respect to the
′′
3
Ox -axis vanishes, we can write a scalar conservation theorem of
moment of momentum in the form
3
3
const
OO
K
′′′
′′ ′
⋅= =
Ki ; the formulae (14.1.23'),
(14.1.24'), with
0
ρ
=
and
3
C
′′
&vi, lead to
C
O
′
′
=
KIω , so that
()()
12 1 22 2 23 3 31 1 23 2 33 3
3
sin cos
O
III III KRX X X RX X X
′′
′
++ + ++ =
,
where we took into account the relations (5.2.36) with
= 0K and so that the axes
chosen for the frame
R are not, in general, principal axes. Introducing the relations
(17.1.41) too, we get
Fig. 17.10 Frictionless motion of a homogeneous rigid solid of
cylindrical form on a fixed horizontal plane
()
()
22
12 31 22 33 23
3
sin cos sin cos 2 sin cos
O
II I I I KRRR R R RRZ
′′
′
++++ =
.
(17.1.42)
We express the kinetic energy of the rigid solid
S with respect to the inertial frame of
reference
′
R
by means of the formulae (14.1.29'), (14.1.30'), with = 0
ρ
in the form
()
2
2
CC
TMv
′′
=⋅ +
Iω ω ; if we take into account also the relations (17.1.41), the
conservation theorem of mechanical energy leads to the relation
()
22 2 2 2
11 22 33 23
() sin cos 2 sin cosIMf I I IRR R R R RZ
′
++++
ªº
¬¼
()
12 31
2sin cos 2()2II MgfhRRRZ R++ =−+
.
(17.1.43)
The differential equations (17.1.42), (17.1.43) allow to obtain Euler’s angles
()tZZ=
and
()tRR= . Eliminating Z
between these equations, we get a differential equation
MECHANICAL SYSTEMS, CLASSICAL MODELS
486
with separate variables, which gives the time t as a function of R, by a quadrature;
returning to the equation (17.1.42), we find Z as a function of R by a quadrature too. As
in the preceding cases, one can make a qualitative study of the solution. An interesting
particular case is that of the heavy homogeneous circular cylinder, case in which the
points
P and Q coincide, while () constf R = .
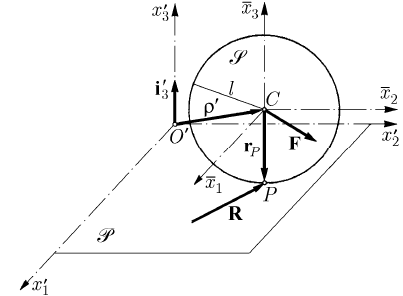
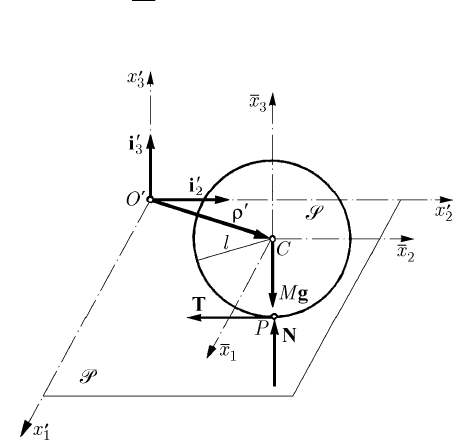
Let be now a
rigid solid sphere for which the repartition of masses is such that the mass
centre
C is just the centre of the sphere, the corresponding ellipsoid of inertia being a
sphere (
11 22 33
IIIJ===); for the sake of simplicity, we can assume that the
sphere is homogeneous. We suppose that the sphere of radius
l moves without sliding
on a fixed plane
P , taken as
′′′
12
Ox x -plane, the sphere being on that part of the plane
for which
3
0x
′
> ; we assume, as well, that the sphere is acted upon by a force F,
applied at the centre
C (which, eventually, includes its own weight too), and by a
constraint force
R, applied at the contact point P (Fig. 17.11). We are in the hypothesis
in which, at the point
P, there does not exist sliding and the moments of rolling and
pivoting friction can be neglected. The mass centre
C moves in a fixed plane, parallel to
the plane
P and situated at a distance l of it; hence,
3
0
C
′′
⋅=
vi . From the imposed
conditions, it results
PC P
′′
=+×=
vv r0ω (
P
′
v is the velocity of the point of the
sphere which is in contact with the plane
P at the moment t ), where we use a frame of
Koenig. From the decomposition
Fig. 17.11 Slidingless motion of a sphere on a fixed plane
n
t
=+ω ω ω
,
3
0
t
′
⋅=
iω ,
3
n
′
×=
i0ω ,
we obtain
3
t
C
l
′′
=×viω , whence
17 Dynamics of Systems of Rigid Solids
17.1.2.7 Slidingless Motion of a Sphere on a Fixed Plane
487

3
1
t
C
l
′′
=×
ivω .
(17.1.44)
The constraint forces which arise between two rigid solids in contact are of the
nature of pressures, so that one must have
3
0
′
⋅≥Ri .
(17.1.45)
The theorem of motion of the mass centre gives
M
′
=+
FR
ρ
,
(17.1.46)
where
M is the mass of the sphere. In Koenig’s frame R , the moment of momentum
with respect to the centre
C is
C
J=K ω , so that the corresponding theorem of
moment of momentum reads
P
J =×
rRω . (17.1.47)
Using the decomposition of the vector
ω and taking into account (17.1.46), we also can
write
()
3
n
t
Jl MJ
′′
=×− −
iFω
ρ
ω .
Because the second member of this relation is a vector parallel to the fixed plane
P , it
results
n
=
0ω . Hence, the pivoting angular velocity
n
ω , is constant, so that it can be
specified by the initial conditions. The given force
F can be decomposed, as well, in the
form
n
t
=+FF F, with
3
0
t
′
⋅=
Fi ,
3
n
′
×=
Fi 0, so that we get
33
tt
JMl l
′′′
+×=×
iiFω
ρ
, . Taking into account (17.1.44), we obtain, finally, the
equation of motion of the mass centre in the form
()
33
t
J
Ml l
l
′′′
×+ =×
iiF
ρ .
Because
′
=
3
constS , hence
′
=
3
0S
, it results that the centre of mass C moves as a
particle of reduced mass
=+
2
0
/MMJl, acted upon only by the given force
t
F
,
hence corresponding to the equation
0
t
M
′
=
F
ρ
.
(17.1.48)
The angular velocity vector is then given by
3
1
n
l
′′
=+×
i
ω ω
ρ
, const
n
=
J
JJJJG
ω .
(17.1.49)
The constraint force
MECHANICAL SYSTEMS, CLASSICAL MODELS
488
()
2
0
1
n
J
M
M
l
=− +
RFF
(17.1.50)
is given by (17.1.46), (17.1.48). The condition (17.1.45) leads thus to the condition
3
0
n
′
⋅≤
Fi ,
(17.1.45')
which must be fulfilled by the given force
F; the mechanical interpretation of this
condition is obvious. The conditions which ensure that the motion is without sliding
must be also fulfilled.
Fig. 17.12 Slidingless motion of a homogeneous sphere of
weight
M g on a plane inclined with the angle B
In particular, let us consider a homogeneous sphere of weight
Mg, which moves
slidingless on a plane inclined with the angle B with respect to the horizontal line.
Observing that
()
=
2
2/5JMl,
()
=
0
7/5MM,
1
sin
t
Mg B
′
=−Fi, where
1
′
i is the
unit vector of the line of greatest inclination of the plane in an ascendant orientation
(Fig. 17.12), we can write the equation (17.1.48) in the form
1
5
sin
7
g B
′′
=−
iρ
.
(17.1.51)
Hence, the motion of the centre
C is uniformly accelerated, the plane trajectory (in the
fixed plane
′
=
3
xl) being rectilinear or parabolical, corresponding to the initial
conditions. The formula (17.1.50) gives the constraint force in the form
13
2
sin cos
7
Mg BB
ªº
′′
=+
«»
¬¼
Rii.
(17.1.52)
Because
cos
NMg B=
,
2
sin
7
TMgB=
,
17 Dynamics of Systems of Rigid Solids
489
the motion takes place without sliding if the angle B verifies the condition
()()
≤=tan 7 / 2 7 / 2 tanfBK, where f is the coefficient of sliding friction.
We notice that in the equation (17.1.51) does not intervene the radius
l of the sphere
S . As small would be this radius, the homogeneous sphere S , which rolls without
sliding on an inclined plane, cannot be assimilated to a particle; indeed, in case of a
particle the equation of motion is
1
-sing B
′′
=
ri.
17.1.2.8 Motion of a Heavy Homogeneous Sphere on a Fixed Horizontal Plane
Let us consider a sphere S , the mass centre C of which coincides with the centre of the
sphere, of radius
l and weight Mg, which moves with friction on the horizontal plan P.
As till now, we choose the axes
′′
1
Ox and
′′
2
Ox in the plane P , the
′′
3
Ox -axis being
directed towards the part in which is the sphere
S (Fig. 17.13). At the contact point P
acts a constraint force having the component
N along the normal to the plane P and the
component
T contained in this plane. We use a movable frame of reference R with the
centre at
C, rigidly connected to the solid, the axes of which are specified by Euler’s
angles with respect to a frame
R of Koenig. We neglect the moments of rolling and
pivoting friction.
Fig. 17.13 Motion of a heavy homogeneous sphere on a fixed horizontal plane
The equation of motion of the mass centre
C is
MM
′
=++
gNT
ρ
,
(17.1.53)
the motion of rotation about this centre being specified by
MECHANICAL SYSTEMS, CLASSICAL MODELS
490
P
J =×
rTω . (17.1.54)
Noting that
′
==
3
constlS , it results that M +=gN0 and M=Ng, wherefrom
TfMg= during the sliding; as a matter of fact, during this motion one must have a
relation of the form
P
M
′
=−Tv, where ()tMM= is a positive scalar. The equations
(17.1.53), (17.1.54) are reduced to
M
′
=
T
ρ
,
(17.1.53')
3
t
JMl
′′
+×
i0ω
ρ
= ,
n
=
0ω .
(17.1.54')
The velocity of the contact point
P of the sphere is given by
()
33
t
PC C
ll
′′ ′ ′ ′
=+×−= ×vv i v iω − ω , so that it results
()
22
333
1
t
PC
Ml Ml
l
JJ
§·
′′ ′′ ′′′ ′
=×=+××=+
¨¸
©¹
vv i i i− ω
ρ ρ ρ
22
11
P
ll
MJ MJ
M
§·§·
′
=+ =− +
¨¸¨¸
©¹©¹
Tv
.
Assuming that the sphere is homogeneous, one can write
7
()
2
PP
t
M
M
′′
=−
vv
.
(17.1.55)
Hence, the velocity
P
′
v has a fixed direction of unit vector
2
′
i (we choose the
′′
2
Ox -axis so that to be parallel to this fixed direction, without any loss of generality).
As well, the constraint force
T will have a fixed direction; because = constT , it
results
2
constfMg
′
=− =
J
JJJJG
Ti too. Integrating the equation (17.1.55), we get
()
0
0
2
7
()
2
PP
tv fgtt
ªº
′′ ′
=− −
«»
¬¼
vi.
(17.1.55')
We notice now, from the equation (17.1.53'), that the acceleration
′
ρ
of the mass centre
is constant in time, its trajectory being rectilinear or parabolical in the plane
′
=
3
lS ,
corresponding to the initial conditions; indeed,
() ()
2
00
00
2
2
C
fg
tt tt
′′′′
−− + −+
iv
ρ
=
ρ
.
(17.1.56)
The angular velocity vector is given by the equations (17.1.54') in the form
()
0
0
1
()
tt
fMgl
ttt
J
′
−−+
iω = ω
,
0
nn
=ω ω .
(17.1.57)
17 Dynamics of Systems of Rigid Solids
491
The magnitude
P
v
′
of the velocity of the point P with respect to the frame of
reference
′
R
decreases in time till vanishing at the moment
()
′
=+
0
1
2/7 /
P
tt vfg
,
so that
()
1
P
t
′
=v0 and
1
()t =T0. Hence, the motion of the sphere takes place with
sliding, after the laws established above for
[
]
∈
01
,ttt; for ≥
1
tt the motion takes
place with rolling and pivoting but without sliding, corresponding to the results in the
preceding subsection. We notice that we must make
t
=F0 in (17.1.48), while
0
const
C
′′
=
J
JJJJG
vρ =
in (17.1.49); it results that the motion of the mass centre C becomes
rectilinear and uniform, the angular velocity vector
ω being constant in time (in space
and with respect to the sphere) .
Let us choose the axes
123
,,Cx Cx Cx of the non-inertial frame of reference R so
that the
3
Cx -axis be after the fixed support of the vector =
0
ω ω ; from Euler’s
equations (5.2.35), it results
cos sin sin 0RKZRK+=
, sin sin cos 0RKZRK−+ =
,
0
cosKZ R X+=
.
The determinant of the coefficients of the first two equations is
sin R ; if ≠ 0R , then it
results
==0RZ
, while the third equation gives =
0
KX
. We get =
0
RR, =
0
ZZ,
()
=−+
000
ttKX K corresponding to the initial moment.
Coriolis observed that the equations (17.1.54') do not depend on the constraint force
T, taking place at any moment t (immaterial on the phase of motion); by integration, we
can write
0
3
C
Ml
J
′′
=×+
viω ω ,
0
const=
J
JJJJG
ω ,
(17.1.58)
as well as
()
0
3
C
J
Ml
′′
=×
viω − ω .
(17.1.58')
Choosing a point
()
0,0, /QJMl over the mass centre C, so that
()
3
/
Q
JMl
′
=ri, it
results
()
0
3
/const
QC Q
JMl
′′ ′
=+×= ×=
J
JJJJG
vv r iω ω ; the vector
0
ω
depends on
the initial conditions. In the second phase of the motion we have
P
′
=
v0, hence
3
C
l
′′
=×viω .
(17.1.59)
Replacing in (17.1.58'), we obtain
0
3
0
C
J
Ml
′′
=×
viω ,
0
2
J
MM
l
=+
.
(17.1.59')
MECHANICAL SYSTEMS, CLASSICAL MODELS
492

From (17.1.58') and (17.1.59'), one sees that – by sliding – the sphere
S moves away
from the pole
′
O
, in the first phase of the motion, and then comes near to the very same
pole, by rolling and pivoting without sliding.
In the first phase of the motion takes place the holonomic constraint relation
′
=
3
lS ,
(17.1.60)
the sphere
S having −=61 5 degrees of freedom. In the second phase of the motion
one has the relation (17.1.59), hence
12
1
d/d
C
vtlSX
′′ ′
==
,
21
2
d/d
C
vtlSX
′′ ′
==−
(after the axes of the frame of reference
′
R
); taking into account (5.2.35'), there
results two constraint relations of the form
()
1
d sin d sin cos d 0lSZRRZK
′
−− =
,
()
2
dcosdsinsind0lSZRRZK
′
++ =
.
(17.1.60')
Assuming that one can write an integrable relation of the form
()
12
,,,, 0f SSZRK
′′
=
,
imposing the condition
d0f = and taking into account (17.1.60'), we get
1
sin 0
ff
l Z
RS
∂∂
§·
+=
¨¸
′
∂∂
©¹
,
12
sin cos sin 0
fff
l RZ Z
KSS
∂∂∂
§·
−+=
¨¸
′′
∂∂∂
©¹
,
∂
=
∂
0
f
Z
.
A partial differentiation of the first two relations with respect to Z, where we took into
account the third relation, leads to
12
cos sin 0
ff
ZZ
SS
∂∂
+=
′′
∂∂
,
12
sin sin cos 0
ff
RZ Z
SS
∂∂
§·
−=
¨¸
′′
∂∂
©¹
.
It results
′′
∂∂=∂∂ =
12
//0ffSSone obtains then ∂∂=∂∂=//0ffRK too. The
function
f depends on no one of the five variables; it results that one cannot determine
any integrable form, starting from the constraint relations (17.1.60'). Hence, these
relations are non-holonomic constraints. One can obtain this result also by using the
Theorem 3.2.1 of Frobenius. Thus, the sphere
S remains only with
()
−+ =612 3
degrees of freedom. The above results are verified, e.g., in case of the billiard ball.
17.1.2.9 Slidingless Motion of a Heavy Circular Disc on a Fixed Horizontal Plane
Let be a heavy rigid solid S, the centre of gravity C of which coincides with its centre,
bounded by a contour
C of radius l, which allows a motion without sliding on a fixed
horizontal plane
P ; we assume that the central ellipsoid of inertia is of rotation about
an axis
3
Cx normal to the plane of the contour C (
12
IIJ==). The fixed frame of
reference
′
R
has the axes
′′
1
Ox and
′′
2
Ox contained in the plane P, while the
′′
3
Ox -
axis is directed along the ascendent vertical; the frame
123
Cx x x is a frame of Koenig.
17 Dynamics of Systems of Rigid Solids
493