Teodorescu P.P. Mechanical Systems, Classical Models Volume II: Mechanics of Discrete and Continuous Systems
Подождите немного. Документ загружается.

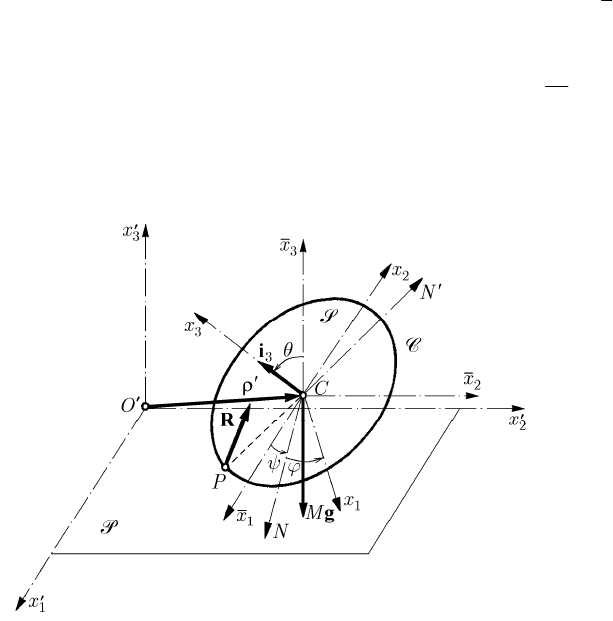
We draw the horizontal line of nodes CN, normal to the plane formed by the axes
3
Cx
and
3
Cx
; the
′
CN
-axis, normal to the line of nodes, is situated along the line of
greatest slope of the plane of the contour
C . The movable frame of reference R ,
rigidly connected to the solid
S, is specified – with respect to the frame R – by
Euler’s angles Z, R and K. Upon the rigid solid
S acts the own weight Mg, at the
centre
C, and the constraint force R, at the contact point P; the moments of rolling and
pivoting friction are neglected (Fig. 17.14).
Fig. 17.14 Slidingless motion of a heavy circular disc on a fixed horizontal plane
We notice that the angular velocity vector will be given by
3
K
′
+
iω = ω , where
′
ω
corresponds to the instantaneous rotation of the movable frame
j
R , of axes CN, CN
′
and
3
Cx
, with respect to the fixed frame
′
R
; the components of these vectors along
the axes of the frame
R
, will be
′
==
11
XXR
,
′
==
22
sinXXZR
,
32
cos cotXZRX R
′
==
, =+
3
cosXKZR
.
The equation of motion of the mass centre
()
CC
MM
′′′
+× = +
vv
g
Rω
(17.1.61)
is written in the form
()
[
]
21
132
cot
CCC
Mv v v RXR
′′′
+− =
,
()
21 2
21 3
cot sin
CC C
Mv v v Mg RXRX R
′′ ′
+−=−+
,
(17.1.61')
()
12 3
321
cos
CCC
Mv v v Mg RXX R
′′′
+− =− +
,
MECHANICAL SYSTEMS, CLASSICAL MODELS
494

with respect to the frame
j
R . Because the rigid solid S has a central ellipsoid of
inertia of rotation, the moment of momentum with respect to the centre
C, in the frame
j
R , will have the components
1
1
C
KJX=
,
2
2
C
KJX=
,
33
3
C
KIX=
; Euler’s
equations
()
C
CCC
′
×=+
IIMM
ω + ω ω
(17.1.62)
can be written (we have
C
=M0 and
C
P
=×MrR
, the components of the vector
P
r in the frame
j
R , being 0, −l, 0)
()
133 2 2 3
cotJIJ lRXXXRX+− =−
,
()
233 2 1
cot 0JIJXXXRX−− =
,
(17.1.62')
=
33 1
IlRX
,
in the frame
j
R .
The rigid solid
S is rolling and pivoting without sliding on the plane P
only if the
velocity
PC P
′′
=+×
vv rω of its contact point P vanishes; in components on the axes
of the frame
j
R , it results
′
+=
3
1
0
C
vlX
,
′
=
2
0
C
v
,
′
−=
1
3
0
C
vlX
.
(17.1.63)
We get thus nine equation (17.1.61'), (17.1.62'), (17.1.63) for the unknowns
Cj
v
′
,
j
X
and
j
R
, = 1, 2, 3j .
Eliminating the velocity of the mass centre between the equations (17.1.61') and
(17.1.63), we obtain
()
−=−
312 1
Ml RXXX
,
()
2
123 2
cot sinMl Mg RXXX R R+=−
,
(17.1.64)
()
123 3
cosMl Mg RXXX R+=− +
.
We can eliminate
1
R
between the last equation (17.1.62') and the first equation
(17.1.64); it results
()
22
3312
0IMl MlXXX+− =
. Associating the second equation
(17.1.62') and using the relation
1
XR=
, we get
()
3
22
32
d
0
d
IMl Ml
X
X
R
+−=
,
()
2
33 2
d
cot 0
d
JIJ
X
XXR
R
−− =
.
(17.1.65)
This system of differential equations determines the functions
22
()XXR=
,
33
()XXR=
. The first equation (17.1.65) gives
17 Dynamics of Systems of Rigid Solids
495

33
2
2
d
1
d
I
Ml
X
X
R
§·
=+
¨¸
©¹
.
(17.1.66)
Replacing in the second equation (17.1.65), we find the resolvent equation of the
problem in the form
()
22
33 3
3
22
3
dd
cot 0
d
d
Ml I
JI Ml
XX
RX
R
R
+− =
+
.
(17.1.67)
The constraint at
P being scleronomous, the elementary work of the constraint forces
vanishes; the conservation theorem of the mechanical energy gives
()()
222 22 2
12 33 3
123
22
CCC
Mv v v J I Mg hXX X S
′′′ ′
++ + + + =− +
.
(17.1.68)
Taking into account (17.1.63) and the relation
′
=
3
sinlSR, we can also write
() ( )
++++= +
22 2 22
123 3
2sin2JMl J I Ml Mgl hXX X R .
(17.1.68')
After determination of the components
22
()XXR=
and
33
()XXR=
, this equation
allows the calculation of the component
=
1
XR
. As a matter of fact, this equation is of
the form
2
()R'R=
; its discussion can be made as in the previous cases. It results,
finally,
()
jj
tXX=
,
1, 2, 3
j =
; from (17.1.63), we obtain
()
Cj Cj
vvt
′′
=, while
(17.1.61') gives the components
j
R
, = 1, 2, 3j , of the constraint force.
Making the change of variable
=
2
cos sR , the problem is reduced to the
hypergeometric Euler-Gauss differential equation
()
()
[]
2
33
3
2
d() d()
11()0
d
d
ss
ss s s
s
s
XX
HBC BCX−+−++ −=
,
(17.1.69)
with
1
2
BC+=
,
()
2
3
2
3
Ml I
JI Ml
BC
=
+
,
1
2
H = .
(17.1.70)
The general solution of this equation depends on two constants of integration M and N
and is expressed by means of the hypergeometric function in the form
() ( )
1
3
() , , ; 1 , 1 ,2 ;sF ssF s
H
XMBCHNBHCHH
−
= + +− +− −
.
(17.1.69')
In the particular case in which the rigid solid is a homogeneous circular disc of mass
M and radius l (e.g., a coin), we have =
2
/4JMl and =
2
3
/2IMl , so that
= 1/3BC , and if the rigid solid is a torus of mass M and of radius (of its axis) l,
MECHANICAL SYSTEMS, CLASSICAL MODELS
496
considered reduced to its axis, then we have =
2
/2JMl and =
2
3
IMl, wherefrom
= 1/4BC . Obviously, a and C have imaginary values and we can write
()()
22
3
1113
() , , ;cos cos , , ;cos
2222
FFXR M BC R N R B C R=+++
.
(17.1.71)
By a change of variable of the form
=cos sR , Korteweg obtains an equation of the
form (17.1.69) too, with
1BC+=
,
()
2
3
2
3
Ml I
JI Ml
BC
=
+
, 1H = .
(17.1.70')
In the particular case of the torus,
= 1/4BC , so that ==1/2BC , obtaining the
solution
()
=
3
11
() , ,1;cos
22
FXR M R
,
(17.1.71')
which depends only on one arbitrary parameter.
If we take into account
()
1
cos sin sin
jj
XRZKRZ
′′ ′
== +
iiω
()
2
sin sin cosRZKRZ
′
+−
i
()
3
cosZK R
′
++
i ,
()
123
cos sin cos cos sin
P
l RZ RZ R
′′′
=−−
riii,
the condition
CP
′
+× =
vr0ω leads to the constraint relations
()
′
+−+=
1
cos cos sin sin cos 0lSZRZRRZKZ
,
()
′
+++=
2
cos sin sin cos sin 0lSZRZRRZKZ
,
(17.1.72)
3
cos 0lSRR
′
−=
.
The last relations is holonomic, obtaining the obvious relation
=
3
sinlSR, by
integration. The first two relations can be written, by simple linear combinations, in the
equivalent Pfaff forms
()
12
cos d sin d cos d d 0lZS ZS RZ K
′′
++ +=
,
12
sin d cos d sin d 0lZS ZS RR
′′
−−=
(17.1.72')
too, which are not integrable, the corresponding constraints being non-holonomic. The
rigid solid
S remains thus with
()
−+ =612 3 degrees of freedom.
17 Dynamics of Systems of Rigid Solids
497
MECHANICAL SYSTEMS, CLASSICAL MODELS
17.2 Motion with Discontinuities of the Rigid Solids. Collisions
The problem of motion with discontinuities of the discrete mechanical systems has be
considered in Chap. 13, §1. In what follows, we will complete these results in case of
the rigid solids, studying the general phenomenon of collision of two arbitrary rigid
solids as well as some interesting particular cases. We put in evidence also the motion
of a rigid solid subjected to the action of a percussive force.
17.2.1 Percussion of Two Rigid Solids
After some general considerations concerning the phenomenon of collision, we present
a basic particular case: the centrical or the oblique collision of two spheres. We
consider then some technical applications which are of interest, as well as the general
case of collision of two rigid solids.
17.2.1.1 General Considerations on the Phenomenon of Collision
The general considerations in Sect. 13.1.1.1 concerning the phenomenon of collision in
case of a discrete mechanical system of particles remain valid in case of a discrete
mechanical system of rigid solids. The basic problem which is put consists in the
determination of the velocities of the points of the rigid solids after collision, assuming
that the corresponding velocities before this mechanical phenomenon are known. As
well, we mark out a phase of compression and a phase of relaxation (restitution), so
that the model of rigid solid is no more sufficient. We use, further, the notion of
percussion, as it has been defined in Chap. 10, Sect.. 1.2.3, starting from the notions of
force and impulse of the generalized force.
Using the results in Sect. 13.1.1.3 and Sect. 14.1.2.1, we can put in evidence the
jump relations corresponding to the discrete mechanical system
S of rigid solids,
reported to an inertial frame of reference
′
R and subjected to the action of given and
constraint, external and internal, percussive and non-percussive forces. By a process of
passing to limit in the sense of the theory of distributions, we express the theorems of
momentum and of motion of the mass centre in the form
()
()
0
0
C
MΔ=Δ =+HvRR,
(17.2.1)
where
()
0
ΔH and
()
0
C
Δv represent the jumps of the momentum of the mechanical
system
S and of the velocity of the mass centre C of this system, respectively, at a
moment of discontinuity, while by R and
R one has denoted the resultants of the given
and constraint external percussions, respectively, which act upon this system at that
moment.
The corresponding jump relation of the moment of momentum will be
()
0
O
OO
Δ=+K MM,
(17.2.2)
where one has denoted by
()
0
O
ΔK the jump of the moment of momentum of the
mechanical system
S , with respect to the fixed pole O, at a moment of discontinuity,
498
while
O
M and
O
M
are the resultant moments of the given resultant percussions and of
the constraint external percussions, respectively, which act upon this system, with
respect to the very same pole, at that moment.
These results can be expressed synthetically in the form of a theorem of torsor,
which maintains its form with respect to a movable pole Q too. As well, this theorem
can be stated also with respect to a non-inertial frame of reference, in a continuous
motion with respect to an inertial frame; the basic equations of the mathematical model
of the collision phenomenon do not need a privileged frame. In the phenomenon of
collision of the considered mechanical system
S , the jump relations are thus invariant
to a change of frame or pole.
The theorems of Carnot and Kelvin in Sect. 13.1.1.5 can be applied also in the case
of the mechanical system
S considered above.
If
+=0RR in an interval of collision, then it results
()
0
Δ=H0 and
()
0
C
Δ=v0, hence the momentum of the mechanical system S and the velocity of the
mass centre of this system, respectively, are conserved in this interval. As well, if
O
O
+=0MM in an interval of collision, then
()
0
O
Δ=K0
, so that the moment of
momentum of the system remains constant in the respective interval.
Obviously, the above results take place also in the case of a single rigid solid
S
subjected to constraints. We mention that the constraints can be of four types:
(i) constraints which take place before the collision interval, in this interval or after it;
(ii) constraints which take place only in the collision interval or after it; (iii) constraints
which take place only before the collision interval or in this interval; (iv) constraints
which take place only in the collision interval.
Referring to a non-inertial frame of reference with the pole at the mass centre, the
jump relations (17.2.2) becomes
()
0
C
CC
Δ=+I ω MM,
(17.2.3)
where we have put in evidence the jump of the rotation angular velocity vector in the
percussion interval. We can write, in components,
()
0
ij j
Ci Ci
IMMXΔ=+, 1, 2, 3i = ,
(17.2.3')
for a rigid solid. If the axes of the considered frame of reference are just the central
principal axes of inertia of the rigid solid
S , then we have
()
11
11
0
CC
IMMXΔ= +
,
()
22
22
0
CC
IMMXΔ= +
,
()
33
33
0
CC
IMMXΔ= +
.
(17.2.3'')
In case of a rigid solid
S with a fixed point O, taken as pole of a non-inertial frame
of reference
R , we have
()
C
′
×+× ×
v = ω
ρ
ω ω
ρ
with respect to an inertial frame
′
R ; it results that
()
()
0
0
C
′
Δ=Δ×
v ω
ρ
, so that the theorem of motion of the mass
centre (17.2.1) takes the form
17 Dynamics of Systems of Rigid Solids
499

()
0
M Δ×=+ω ρ RR.
(17.2.4)
Analogously, in case of a rigid solid
S with a fixed axis, specified by the fixed
points
′
O and
1
O , the equations (14.2.1), (14.2.1') read
()
1
2111
0
MRRRXS
′
−Δ = ++
,
()
2
1212
0
MRRRXS
′
Δ=++
,
(17.2.5)
′
=++
3313
0 RRR,
()
31 12
1
0
O
IMlRXΔ= −,
()
23 11
2
0
O
IMlRXΔ= +, (17.2.5')
()
33
3
0
O
IMXΔ= ,
where
j
R are the components of the given percussions, while
j
R
′
,
1
j
R , = 1, 2, 3j ,
are the components of the constraint percussions at the fixed points
′
O and
1
O ,
respectively.
17.2.1.2 Centric Collision of Two Spheres
Let be two rigid spheres
1
S
and
2
S of masses
1
m and
2
m , the centres
1
O and
2
O of
which have the velocities
1
′
v and
2
′
v , respectively (we assume that
12
vv
′′
>
, otherwise
the spheres can never be in collision), along the line
12
OO (Fig. 17.15,a); after
collision, the corresponding velocities will be
1
′′
v and
2
′′
v , respectively, and must be
determined (Fig. 17.15b). Because external percussions are not involved, we apply the
conservation theorem of momentum (the phenomenon is one-dimensional, so that there
intervene only the components of the velocities along the
1
Ox -axis, taking the
respective fixed pole on the line of the centres)
Fig. 17.15 Centric collision of two spheres: (a) before and (b) after collision
′ ′ ′′ ′′
+=+
11 22 11 22
mv mv mv mv
(17.2.6)
A second relation necessary to solve the problem (we have two unknowns:
1
′′
v and
2
′′
v ) is obtained by a mathematical modelling corresponding to the mechanical
MECHANICAL SYSTEMS, CLASSICAL MODELS
500
phenomenon. We consider thus a first phase of compression (
[
)
0
,ttt
′
∈
) which takes
place as long as the velocity of the centre
1
O is greater than the velocity of the centre
2
O , lasting till the equalization of the two velocities (
0
tt= ). The corresponding
percussions of this phase is
()()
00
11 2 2
c
Pmvv mvv
′′
=−= −
, where
0
v
is the
common velocity; it results
11 22
0
12
mv mv
v
mm
′′
+
=
+
,
()
12 2 1
12
c
mm v v
P
mm
′′
−
=
+
.
(17.2.7)
In the phase of relaxation (
(
]
0
,ttt
′′
∈
), the velocity of the centre
1
O continues to
decrease till
′′
1
v , and the velocity of the centre
2
O increases till
′′
2
v ; the percussion
corresponding to this phase is
()()
′′ ′′
=−=−
00
1122
r
Pmvv mvv, so that
11 22
0
12
mv mv
v
mm
′′ ′′
+
=
+
,
()
12 2 1
12
r
mm v v
P
mm
′′ ′′
−
=
+
.
(17.2.7')
Introducing also the coefficient of restitution (coefficient of elasticity by collision)
21
12
r
c
vv
P
k
Pvv
′′ ′′
−
==
′′
−
,
(17.2.8)
we obtain the second relation, which is added to the relation (17.2.6). Finally, we can
write
()
()
2
11 12
12
1
m
vv k vv
mm
′′ ′ ′ ′
=−+ −
+
,
()
()
1
22 12
12
1
m
vv k vv
mm
′′ ′ ′ ′
=++ −
+
(17.2.9)
and one observe that
12
vv
′′ ′′
< , the spheres moving away one from the other.
In the case in which
= 1k (hence, =
rc
PP), the two spheres are compressed in the
first phase, returning then to the initial form; there corresponds a phenomenon of elastic
collision, the velocities after it being given by
()
[]
122121
12
1
2vmvmmv
mm
′′ ′ ′
=+−
+
,
()
[]
211122
12
1
2vmvmmv
mm
′′ ′ ′
=−−
+
.
(17.2.9')
If
= 0k (hence, = 0
r
P ), then the relaxation phase takes no more place; the spheres
adhere to each other and remain glued together, so that
()
12 11 22
12
1
vv mvmv
mm
′′ ′′ ′ ′
== +
+
.
(17.2.9'')
17 Dynamics of Systems of Rigid Solids
501
The respective phenomenon is called plastic collision. Between these two limit cases
(for
01k<<) the spheres return practically to their initial forms, the phenomenon
being a natural collision (an elastic-plastic collision).
Taking into account (17.2.9), the loss of kinetic energy (
()
0
TTT%
′′′
=−
()( )
22 2 2
11 22 11 22
/2 /2mv mv mv mv
′ ′ ′′ ′′
=+ −+ ) is given by
()
()
()
2
0
2
12
1
1
2
Tkmvv%
′′
=− −
,
12
111
mm m
=+
.
(17.2.10)
In case of an elastic collision, we have
()
0
0T% =
, the phenomenon taking place
without loss of kinetic energy; in case of a plastic collision, we find again the formula
(13.1.77). The lost kinetic energy is transformed in work of deformation, in caloric or
luminous energy etc.
If
12
mm= (it is not necessary that the spheres be identical), we get
()()
[]
112
1
11
2
vkvkv
′′ ′ ′
=−++ ,
()()
[]
221
1
11
2
vkvkv
′′ ′ ′
=−++ .
(17.2.9''')
In case of an elastic collision, it results
12
vv
′′ ′
= and
21
vv
′′ ′
= , the spheres transmitting
the energy each other. In particular, if
2
0v
′
= , then we have
1
0v
′′
= too; hence, if an
elastic sphere
1
S strikes, with a velocity
1
v
′
, another elastic sphere
2
S , having the
same mass and being at rest with respect to a given inertial frame of reference, then it
transmits to the latter one its velocity
1
v
′
and then stops.
17.2.1.3 Technical Applications
A particular case of the problem considered at the preceding subsection, interesting for
technical applications, is that of the plastic collision of a sphere
1
S of mass
1
m and
velocity
1
v with another sphere
2
S of mass
2
m , at rest with respect to a given frame of
reference. If we make
2
0v
′
= in (17.2.9''), then we obtain
1
12 1
12
m
vv v
mm
′′ ′′ ′
==
+
.
(17.2.11)
As well, the relation (17.2.10) reads
()
0
2
1
1
2
Tmv%
′
=
.
(17.2.11')
The relative loss of kinetic energy with respect to the kinetic energy before collision
(
()
2
11
1/2Tmv
′
= ) will be
()
0
2
12
12
1
1/
m
T
Tmm
mm
%
==
+
+
.
(17.2.11'')
These results of theoretical nature (the considered mathematical modelling) can be
successfully used for different technical applications, e.g., in case of beating a nail with
MECHANICAL SYSTEMS, CLASSICAL MODELS
502
a hammer (
1
m is the mass of the hammer,
2
m is the mass of the nail, while
1
v
′
is the
velocity with which the hammer beats the nail) or in case of beating a pilot with a
rammer (
1
m is the mass of the rammer,
2
m is the mass of the pilot, while
1
v
′
is the
velocity with which the rammer beats the pilot). It is important, in both cases, that the
relative loss of kinetic energy be as small as possible; one observes, from (17.2.11''),
that the ratio
12
/mm must be as great as possible, hence the mass of the hammer (or
the rammer) must be much more greater than the mass of the nail (pilot).
In case of a process of working up a piece (bending, adjustment, rivetting etc.) it is
useful a greater loss of kinetic energy, which is transformed in work of deformation.
The ratio
()
0
/TT% is as greater as the ratio
12
/mm is smaller, so that the hammer
must have a small mass
1
m , while the piece to be worked up must have a great mass
2
m . Thus, the piece to be worked up is put on a bench (e.g., an anvil), increasing thus
the mass
2
m . As well, in case of rivetting, the rivet head bears on a special metallic
piece (a rivetting knob), increasing much its mass
2
m .
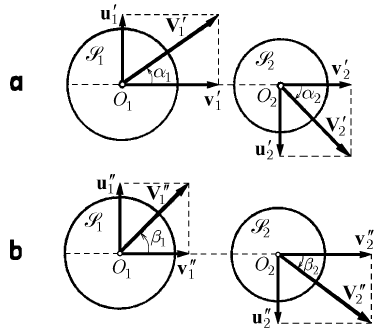
17.2.1.4 Oblique Collision of Two Spheres
Let be once more the two spheres
1
S and
2
S , of centres
1
O
and
2
O
and masses
1
m
and
2
m , the centres of which have the velocities
1
′
V and
2
′
V , respectively (with respect
to a given fixed frame of reference); the supports of these velocities are no more
directed along the line of the centres and have the components
1
′
v and
2
′
v (
12
vv
′′
> )
along this line and the components
1
′
u and
2
′
u normal to it (Fig. 17.16a). After
collision, these velocities become
111
′′ ′′ ′′
=+
Vvu,
222
′′ ′′ ′′
=+
Vvu, the notations
corresponding to the precedent ones (Fig. 17.16b). If
1
B and
2
B are the angles made
by the velocities
1
′
V and
2
′
V , respectively, with the line of centres, there results
Fig. 17.16 Oblique collision of two spheres: (a) before and (b) after collision
11 1
cosvV B
′′
=
,
11 1
sinuV B
′′
=
,
22 2
cosvV B
′′
=
,
22 2
sinuV B
′′
=
.
17 Dynamics of Systems of Rigid Solids
503