Teodorescu P.P. Mechanical Systems, Classical Models Volume II: Mechanics of Discrete and Continuous Systems
Подождите немного. Документ загружается.

For linearization, we assume – further – that ≅
12
RR so that
()
−
2
211 1
RRR R
and
()
−
2
212 2
RRR R
; we may write
++ =
11 2 1
0
g
l
BR R CR
,
++ =
22 1 2
0
g
l
BR R R
.
(17.1.4'')
We search solutions of the form
=
11
() e
t
t
T
RM, =
22
() e
t
t
T
RM and are led to
()
++=
2
11 2 1
0
g
l
BM M T CM
,
()
++=
2
22 1 2
0
g
l
BM M T M
;
(17.1.5)
one must have
()()
(
)
−−+−=
2
42
12 1 2
10
gg
ll
BB T B CB T C ,
wherefrom
()
()
ªº
=− + ± − +
¬¼
−
2
2
12 12
12
4
21
g
l
TBCBBCBC
BB
,
(17.1.5')
so that the linear algebraic system in
1
M and
2
M be compatible. Noting that the
discriminant of the biquadratic equation is always positive, that the magnitude between
the square brackets is also positive and that
>
12
1MM we can state that <
2
0T .
Denoting by
±
1
iN , ±
2
iN the corresponding roots and determining
12
, MM from the
system (17.1.5), one obtains the general solution of the linearized system (17.1.4'') in
the form
(
)
()
(
)
()
() ( )
22
11211122222
22
2 11112222
() cos cos ,
( ) cos cos ,
gg
tC t C t
ll
tC t C t
RBNNKBNNK
RNNKNNK
=− −+− −
=−+−
(17.1.6)
where
1
C ,
2
C ,
1
K ,
2
K are arbitrary constants, which are determined by the initial
conditions. The system
S oscillates so that the amplitudes of any oscillation are small
(hence, the constants
1
C and
2
C too), the pulsations
1
N and
2
N being, in general,
distinct.
We can make an analogous study of the double pendulum choosing as unknown
functions the co-ordinates
′
=
211
() sinxt l R and =
222
() sinxt l R of the mass centres
1
C and
2
C , respectively.
We may put the problem to find the conditions in which the mechanical system
S
oscillates as a unitary rigid solid; in this case, we must have
=
12
() ()ttRR
. Assuming
that
==
12
() () ()tttRRR too, the equations (17.1.4) become
MECHANICAL SYSTEMS, CLASSICAL MODELS
464
()
++ =
1
1sin0
g
l
BR C R
,
()
++ =
2
1sin0
g
l
BR R
;
(17.1.7)
we are led to the same solution if the relation
()
+= +
12
11BC B takes place, hence
if
()()
[
]
+− +− =
22 22 2
12 1 1 1 2 2 12 22
Mli l li l lll Mli,
(17.1.7')
even in case of finite amplitudes. It is sufficient to have
≅
12
RR in the case of small
motions. The two equations (17.1.7) correspond thus to a synchronous mathematical
pendulum of length
()
′
=+
2
1ll B hence of length
′
=+ +
22
lll l,
(17.1.7'')
where
=>
2
222
/0lil
; we notice thus that
′′
=
1
lOO
, the point
′
O
being on the other
part of the mass centre
2
C , with respect to the point
2
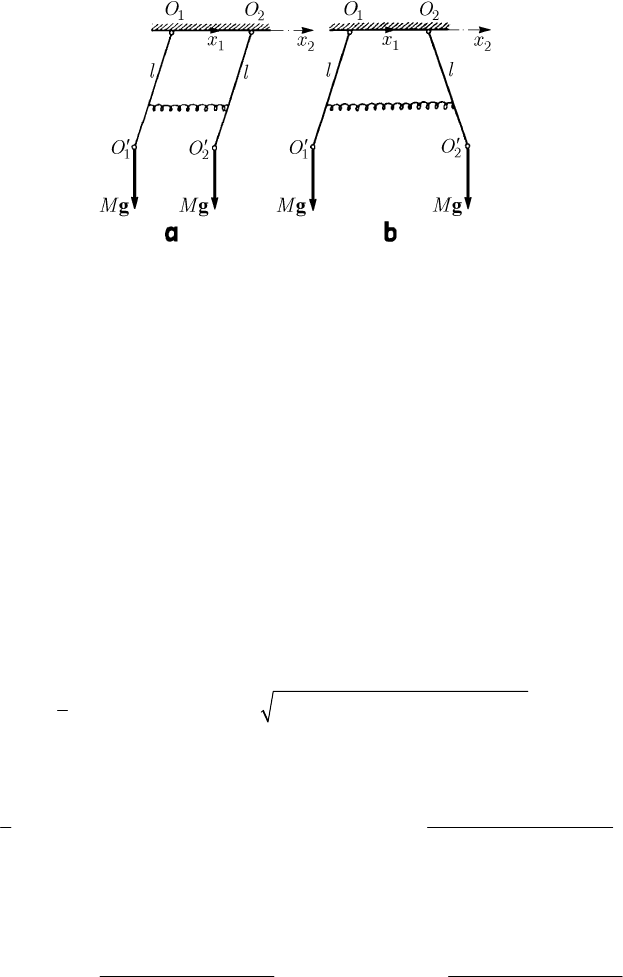
O (Fig. 17.1,b).
A bell together with its tongue forms a double pendulum, subjected to small
oscillations. If, by construction, the condition (17.1.7') takes place, then the bell does
not ring (no sound is heard, because the tongue cannot strike the bell). Such a
phenomenon took place in reality, remaining famous, at the inauguration, in 1876, of
the bell of the cathedral in Cologne; this bell has been put in form from the bronze of
the guns conquered by the Prussian army at Sedan, in 1870, in the campaign against
France.
Returning to the non-linear system of differential equations of second order (17.1.4),
we introduce the notation
=
11
zR , =
22
zR , =
13
zR
, =
2
4
zR
, so that the system
becomes now of first order and reads
=
13
zz
, =
2
4
zz
,
() ()
+−−−+=
ªº
¬¼
2
3421421 1
cos sin sin 0zzzzzzz zBC
,
(17.1.8)
() ()
+−+−+=
ªº
¬¼
2
4321321 2
cos sin sin 0zzzzzzz zH ,
where
()
=
+
2
4/3
rs
rm
B ,
()
+
=
+
2
4
3
4/3
rm
s
rm
C
, =
3
4
r
s
H
(17.1.8')
are non-dimensional coefficients with
=
1
2
M
m
M
, =
1
l
r
l
,
2
1
l
s
l
=
.
(17.1.8'')
Using the theory of Lie transform applied by L. Morino, F. Mastroddi and M. Cutroni
in 1992, Anca Zlătescu studied, in 1998, in her doctor thesis, the system (17.1.8),
assuming that
17 Dynamics of Systems of Rigid Solids
465
()
()
2
21
2
21
1
1cos
1cos
zz
zz
BH
BH
≅+ −
−−
.
(17.1.8''')
She put in evidence also the effect of this approximation, as well as the influence of the
generalized forces of vibrating type applied at the points
2
C or
′
O
, which introduce
perturbing terms in the second members of the last two equations (17.1.8). In this order
of ideas, she dealt with the conditions of stability of the motion; the passing to chaos
has been taken into consideration too.
Analogously, one can study the problem of the triple pendulum.
17.1.1.3 Sympathetic Pendulums
Let be a mechanical system
S formed of two identical (in tune) or distinct (out of time)
physical pendulums, linked between them (stronger or weaker) by an elastic spring;
these pendulums which oscillate simultaneously are called sympathetic (coupled)
pendulums. We mention the analogy between this system and a device formed of two
electrical circuits (one primary and one secondary) inductively connected. If
1
l and
2
l
are the lengths of the mathematical pendulums synchronous with the considered
sympathetic pendulums, then the pulsations are given by
=
2
11
/glX , =
2
22
/glX ; the
elastic constants involved are
=
11
/kMT , =
22
/kMT , where
1
M
and
2
M
are the
masses of the pendulums, while
T is the stress in the spring for a unit linear strain
(Fig. 17.2).
Fig. 17.2 Sympathetic Pendulums
If, in particular, the sympathetic pendulums are perfectly in tune, then we can write
the equations of motion in the form (
==
12
lll
, ==
120
XXX,
==
12
MMM
,
==
12
kkk
)
()
2
0
11 12
xxkxxX+=−−
,
()
2
0
22 21
xxkxxX+=−−
,
(17.1.9)
where
1
x and
2
x are the elongations of the corresponding centres of oscillation
′
1
O and
′
2
O . The change of variable =−
112
xxY , =+
212
xxY leads to the equations
()
2
0
11
20kYX Y++ =
,
2
0
22
0YXY+=
,
(17.1.9')
MECHANICAL SYSTEMS, CLASSICAL MODELS
466
with the pulsations =+≅
2
0
2kXX +
00
/kXX,
′
=
0
XX. Assuming that at the
initial moment
0t = we have =
0
1
xa, =
0
1
0x
, =
0
2
0x , =
0
2
0x
, hence
==
00
12
aYY , ==
00
12
0YY
, we get
1
()cos ta tYX,
2
()cos ta tYX
′
and then
(
()
112
/2x YY=+ ,
()
221
/2x YY=− )
()
()
()
1
( ) cos cos cos cos
222
tt
a
xt t t a
XX XX
XX
′′
−+
′
=+=
,
()
()
()
2
() cos cos sin sin
222
tt
a
xt t t a
XX XX
XX
′′
−+
′
=−=
.
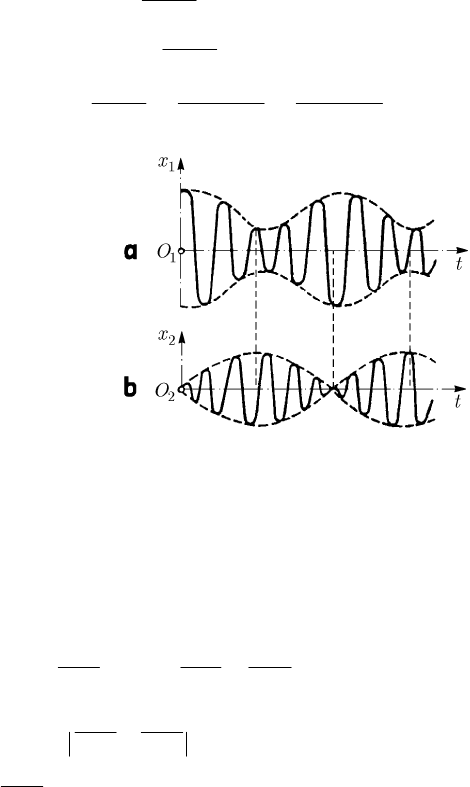
(17.1.9'')
Fig. 17.3 Sympathetic pendulums: Graphics of the elongations
of the points
1
O
′
(a) and
2
O
′
(b)
The graphics of the elongations of the points
′
1
O and
′
2
O are drawn in Fig. 17.3a
and b, where the variation of the amplitude (vibrations with modulation in amplitude)
is represented by broken lines; if
()
00
/2 /2kXX X X
′
−≅
, then the connection of
the pendulums is a weak connection, the amplitude varying slowly in time (we can say
that a fluctuation of the amplitude takes place). One can see that the vibration of each
physical pendulum can be obtained by the superposition of two fundamental vibrations;
to a constructive interference (maximal amplitude) of one pendulum corresponds a
destructive interference (which is an extinction) for the second pendulum. Each of the
two pendulums leads to a phenomenon of beats (see Chap. 8, Sect. 2.2.4 too). The
mechanical energy passes from a pendulum to another one.
There are two cases in which this energy transfer does not take place: the symmetric
case (Fig. 17.4a) in which
==
00
12
/2xxa, ==
00
12
0xx
, resulting
12
() ()xt xt=
()
′
=
/2 cosatX and the antisymmetric case (Fig. 17.4b) in which
=− =
00
12
/2xxa, ==
00
12
0xx
, obtaining
()
12
() () /2 cosxt xt a tX=− = . These
vibrations represent the two fundamental vibrations (principal vibrations or proper
vibrations) of the sympathetic pendulums, which take place without transfer of energy,
corresponding to the number of degrees of freedom of the mechanical system. One
observes that the equations (17.1.9') are just the differential equations of these two
17 Dynamics of Systems of Rigid Solids
467
vibrations. The vibrations (17.1.9'') are obtained by superposing the effects of the two
fundamental vibrations.
Fig. 17.4 Sympathetic pendulums: a) symmetric case; b) antisymmetric case
If the two pendulums are out of tune (the general case) then the equations of motion
read
()
2
111 112
xxkxxX+=−− ,
()
2
222 221
xxkxxX+=− − .
(17.1.10)
Putting
i
11
e
t
xA
O±
=
,
i
22
e
t
xA
O±
=
, we get the homogeneous algebraic system
()
−+ − =
22
11112
0kA kAXO ,
()
−+ − =
22
22221
0kA kAXO ;
the condition of compatibility leads to the biquadratic equation
()
[
]
()
[
]
−+ −+ =
22 22
11 22 12
kkkkOX OX ,
wherefrom
()
2
222 22
1212 1212 12
1
4
2
kk kk kkOXX XX
ªº
= + ++± − +− +
«»
¬¼
,
both roots being positive. Expanding the radical after Newton’s binomial, we get
()
()
½
ªº
°°
≅ + ++± − +− +
«»
®¾
−+−
«»
°°
¯¿
¬¼
12
222 22
1212 1212
2
22
1212
2
1
1
2
kk
kk kk
kk
OXX XX
XX
for
1
k
and
2
k
small (hence for a weak connection); the pulsations X and
′
X will be
given by
()
12
22
11
22
11 22
kk
k
kk
XX
XX
=++
+− +
,
()
12
22
22
22
11 22
kk
k
kk
XX
XX
′
=+−
+− +
.
(17.1.10')
MECHANICAL SYSTEMS, CLASSICAL MODELS
468
One obtains thus elongations of the form
()
()
1
( ) cos sin cos sinxt A t B t A t B tHX XH X X
′′ ′ ′ ′
=++ +
,
2
( ) cos sin cos sinxt A t B t A t B tXX X X
′′′′
=++ +
,
(17.1.10'')
where
H and
′
H correspond to the non-determinate solutions of the homogeneous
linear algebraic system. With the initial conditions (for
0t = )
=
0
1
xa
,
0
1
0x =
,
=
0
2
0x , =
0
2
0x
, it results
()
1
() cos cos
a
xt t t
HXHX
HH
′′
=−
′
−
,
()
2
() cos cos
a
xt t t
XX
HH
′
=−
′
−
()()
2
sin sin
22
tt
a
XX XX
HH
′′
−+
=
′
−
.
(17.1.10''')
Fig. 17.5 Sympathetic pendulums out of tune. Graphics of the elongations
of the points
1
O
′
(a) and
2
O
′
(b)
The graphics of these elongations are drawn in Fig. 17.5a and b. One observes that, in
this case, the destructive interference of the first pendulum does not lead to extinction
after intervals of time equal to
()
′
−
2/QXX.
An analogous study can be made choosing as unknown functions the angles
()
111
() arcsin /txlR = and
()
222
() arcsin /txlR = made by
′
11
OO and
′
22
OO with
the descendent vertical line, respectively.
We denote
=
11
OO l and
11 22
OQ OQ a==, where
1
Q
and
2
Q
are the ends of the
elastic spring, characterized by the elastic constant
k; the elastic force in the spring is
thus given by
12 12
kOO QQ− . We notice that
()
[]
()
2
2
2
2
12 2 1 2 1
sin sin cos cosQQ l a aRR RR=+ − + −
() ()
[]
=+ − + − −
22
21 21
2sin sin 2 1coslal aRR RR.
(17.1.11)
17 Dynamics of Systems of Rigid Solids
469
The non-linear system of equations of motion is obtained in the form
()
2
11 1 1 1 1 2
1
sin 0
2
k
IMgl lQQRR
R
∂
++−=
∂
,
()
2
22 2 2 2 1 2
2
sin 0
2
k
IMgl lQQRR
R
∂
++−=
∂
.
(17.1.12)
Introducing the expression of
12
QQ
, it results
()
[]
11 1 1 1 1 2 1
sin cos sin 0I M gl kaH l aRR RRR++ +−=
,
()
[]
22 2 2 2 2 2 1
sin cos sin 0I M gl kaH l aRR RRR+− +−=
,
(17.1.12')
where
()
()
()
−
=
12
12
12
,
,
,
l
H
:RR
RR
:RR
,
(17.1.11')
with
() () ()
[]
{}
2
22
12 12 2 1 2 1
,2sinsin21cosQQ l al a:RR R R R R==+ − + − − .
(17.1.11'')
Using the notations
2
11
1
Mgl
w
Ik
=
,
122
2
MMgl
w
Ik
C =
,
l
:
' =
,
a
l
Y =
,
1
1
alM
I
B =
,
i
1
2
alM
I
B =
,
(17.1.13)
as well as
()
−
=−
1/2
12
,1HR R ' ,
(17.1.13')
with
() ( ) ( )
[]
2
12 2 1 2 1
,12sinsin21cos'R R Y R R Y R R=+ − + − − .
(17.1.13'')
Introducing the unknown functions
=
11
z R , =
22
z R , =
31
z R
, =
2
4
z R
, the system of
differential equations of second order takes the form of a system of first order
13
zz=
,
24
zz=
,
() ( )
[
]
=− − + −
3112121
sin , cos sinzwz zz z zzHB Y
,
(17.1.12'')
()
i
()
[
]
4212221
sin , cos sinzwzzz z zzCHBY=− + + − .
MECHANICAL SYSTEMS, CLASSICAL MODELS
470

These equations have been introduced in 2001 by ùtefania Donescu in her doctor thesis.
She studied them using the linear equivalence method (LEM) established by Ileana
Toma in her doctor thesis, in 1980 (see Chap. 24, Sect. 1.2), assuming that
() ()
[]
2
21 21
2sin sin 2 1cos 1YR R Y RR−+− −<,
(17.1.13''')
wherefrom
() () ()
[]
≅− − − − −
2
12 2 1 2 1
,sin 1cosHR R Y R R Y R R ;
(17.1.13
iv
)
this approximation has been thoroughly discussed. ùt. Donescu dealt also with cnoidal
solutions, obtaining numerical results plotted into diagrams, as well as interesting
results concerning the stability of the mechanical system, both for the approximate case
and for the exact one.
17.1.2 Contact of Two Rigid Solids
In what follows, we consider firstly the general case of the rigid solid in contact with a
fixed surface, assuming that one can have constraints with friction too; the results thus
obtained will be then used to the study of some particular problems (the motion of the
gyroscope in contact with a fixed plane, the motion of a heavy circular disc or of a
heavy sphere on a fixed plane etc.).
The first study in this direction has been made by S.-D. Poisson (the motion of a
heavy rigid solid in contact with a fixed plane); Cournot took again the problem
considering the friction too. The particular case of the motion of a billiard ball has been
considered by Coriolis in 1835. Puiseux studied the motion of a heavy rigid solid of
rotation on a perfectly smooth horizontal plane; Slesser tackled in 1861 the same case,
assuming that the rigid solid can roll and pivot without sliding, Neumann taking again
the problem in 1886. Other results are due to Scouten, Ferrers, Carvallo, Korteweg and
Appell.
17.1.2.1 General Considerations
Let be two rigid solids
S and
′
S , bounded by the surfaces S and
′
S
, respectively,
having – at every moment – the ordinary common point
′
≡PP
, ∈PS,
′′
∈PS
(obviously, the points
P and
′
P
of the two rigid solids are always other ones, the
mentioned situation being instantaneous), at which they have the same tangent plane
1 ; the distribution of the velocities in the relative motion of a rigid solid with respect
to another one has been considered in Chap. 5, Sect. 3.3.1. In this study, we neglect any
interaction which can intervene between the two solids, excepting the actions of
contact. The condition of impenetrability of the rigid solids (which can be separated or
in contact) is expressed, in general by an inequality; e.g., if the rigid solids are two
spheres
()
,OR and
()
′′
,OR
, the unilateral constraint relation is expressed in the form
OO R R
′′
≥+
J
JJJG
. We assume, in what follows, that the constraints are bilateral, having
contact relations at one point
′
≡PP
, expressed by equalities.
Let R be the constraint force which represents the action of the rigid solid
′
S upon
the rigid solid
S, at the point P , and let
′
R be the constraint force corresponding to
17 Dynamics of Systems of Rigid Solids
471
the action of a rigid solid
S upon the rigid solid
′
S , at the point
′
P
; in conformity to
the theorem of action and reaction, these forces verify the relation
′
+=
RR0. We
mention that the equations of motion of the rigid solid (the theorems of momentum and
of moment of momentum), the theorem of action and reaction and the relation of
impenetrability (relation of bilateral constraint) are not sufficient to determine the
unknowns which intervene (as a matter of fact, the constraint forces R and
′
R are
unknowns); to solve the problem, one must add some supplementary conditions.
In case of a contact without friction (the surfaces
S and S
′
are smooth), the
constraint forces R and
′
R must be normal to the tangent plane 1 at the point of
contact, being denoted by N and
′
N respectively (we have
′
+=
NN 0; eventual
tangential components T and
′
T would correspond to an infinite relative displacement
in the plane
1 . We notice that these constraint forces are pressures, the sense of which
is towards the interior of the rigid solid upon which they act and which vanish when the
contact ceases (see Chap. 3, Sect. 2.2.9 too). In some cases, a contact takes place along
a curve or on a certain surface and one can make analogous considerations.
If the contact is with friction, remaining punctual, then the friction is a sliding
friction. We can decompose the constraint force in the form
=+RNT (the same for
the constraint force
′
R ) where N is the ideal constraint force (normal, without friction),
while T is the sliding constraint force (see Chap. 3, Sect.. 2.2.12 too). We denote by
f
the Coulombian coefficient of friction ( 0f ≥ ), introduced in Chap. 3, Sect.. 2.2.11.
Further, we assume that the rigid solid
′
S is at rest with respect to an inertial frame of
reference, studying the motion of the rigid solid
S on the surface
′
S
. If the sliding
velocity of the rigid solid
S on the surface
′
S
at the contact point (the velocity of a
point
Q which coincides with
′
≡PP
at any moment t, hence the velocity of
transportation with respect to the surface
′
S
, contained in the plane 1 and given by
(5.3.21)) vanishes (
Q
=v0), then we have f≤TN; to
Q
≠v0 corresponds
f=TN, with
Q
M=−Tv, /0
Q
fM =>Nv (in this limit case, the vector R
has its support along a generatrix of the cone of friction).
In fact, in the dynamic case one uses the Coulomb-Morin relation in the form
vers
d
fN=−Tv, (17.1.14)
where
d
f
is a coefficient of a dynamic friction; we notice that
≤
s
d
ff
, =
s
ff, where
s
f is the coefficient of static friction. In general, we can have ()
dd
ffv= .
The equation of motion of the theoretical contact point
P is of the form
d
MfN=−
rF
τ ,
d
ds
=
r
τ
,
(17.1.15)
where F is the resultant of the given forces, while M is the mass of the rigid solid
S,
mathematically modelled as a particle (considered to be reduced to the point
P); by
integration, we get
MECHANICAL SYSTEMS, CLASSICAL MODELS
472

2
00
1
dd
2
ss
d
Mv h f N s=+ ⋅ −
³³
Fr ,
(17.1.16)
where
[
]
∈ 0,ss
is a curvilinear co-ordinate along the trajectory of the point P. In case
of a conservative force, we can write
0
d
s
d
TV h fNs+=−
³
,
(17.1.16')
where
h is the energy constant. Because the above integral is always positive, it results
a decrease of the mechanical energy of the rigid solid
S which slides on the surface of
another fixed rigid solid
′
S . This energy is lost, being transformed in a degraded
energy (e.g., heat).
But, practically, the contact between rigid solids is not punctual taking place on a
small part 4 of the surface, where a process of deformation takes place (the model of
rigid is only an approximation); the actions
4
R of a solid upon the other one are
distributed on 4after a unknown law (as a mater fact, even the surface 4 is, in general,
difficult to specify). Therefore, assuming some simplifying hypotheses, the torsor of
these actions at a point
′
≡∈PP
4 is determined.
We assume, further, the rigid model for the two solids, the contact taking place –
theoretically – at the point
′
≡PP
; the action of a solid upon the other will be
modelled by a torsor (a force and a moment (couple)), applied at the theoretical point of
contact, the theorem of action and reaction being used. If we suppose, further, that the
rigid solid
′
S is at rest with respect to an inertial frame of reference
′
R
, at the point
P of the solid S will act, in general, a constraint torsor
{
}
P
¦
τ R
of resultant R and
resultant moment
P
M (see Chap. 3, Sect.. 2.2.12 too). We effect a decomposition, so
that one component be along the normal to the surface
S at P, the other component
being contained in the plane
1 tangent to this surface, at the same point; one obtains
thus
=+RNT and
pr
P
=+MMM where
p
M is the pivoting friction moment
(along the normal), while
r
M is the rolling friction moment (in the tangent plane). As
well, we notice that the motion of the rigid solid
S with respect to the surface S
′
is
characterized by a translation of velocity
()
Q
tv
and by a rotation of angular velocity
()tω (see Chap. 5, Sect.. 3.3.1 too); analogously, we decompose the angular velocity in
the form
n
t
=+ω ω ω , where ()
n
tω is the pivoting angular velocity, while ()
t
tω is
the rolling angular velocity. If the rigid solid
S is at rest with respect to the frame of
reference
′
R
(
Q
=v0, = 0ω ), then the inequalities
TfN≤ ,
r
MsN≤ ,
p
MaN≤ , ,, 0
f
sa≥ , (17.1.17)
take place, where
f is the (non-dimensional) coefficient of sliding friction, s is the
rolling friction coefficient, while
a is the pivoting coefficient of friction (s and a have
the dimension of a length), as it has been shown in detail in Chap. 5, Sect.. 3.3.1. In the
17 Dynamics of Systems of Rigid Solids
473