Teodorescu P.P. Mechanical Systems, Classical Models Volume II: Mechanics of Discrete and Continuous Systems
Подождите немного. Документ загружается.


case in which a sliding, a rolling and a pivoting of the rigid solid
S on the surface
′
S
take place (
Q
≠v0,
t
≠ 0ω ,
n
≠ 0ω ), the inequalities (17.1.17) are replaced by
equalities, in the form
Q
M=−Tv,
rr
t
M=−M ω ,
ppn
M=−M ω ,
0
Q
N
f
v
M
=>
, 0
r
t
N
sM
X
=>, 0
p
n
N
aM
X
=>
.
(17.1.17')
If one or two of the types of motion mentioned above do not take place, then the
corresponding relations of equality (17.1.17') are replaced by the inequalities (17.1.17),
which put in evidence the respective friction phenomena. E.g., if
Q
≠v0,
n
t
==0ω ω , then we have a (pure) sliding without rolling and pivoting (the surfaces
S and
′
S
are perfectly smooth), while if
Q
=v0,
t
≠ 0ω ,
n
= 0ω , then we have a
(pure) rolling without sliding and pivoting (the surfaces
S and
′
S
are perfectly rough).
We have assumed, in the above considerations, that the friction coefficients
f, s and a
are the same both in the static (relations (17.1.17)) and in the dynamic case (relations
(17.1.17')).
If one has a contact at several points between the surfaces
S and
′
S
, then at one of
these points (let be the point
P ) is concentrated the contribution due to the constraint
forces et each point. As well, if between these surfaces takes place a contact along an
arc of curve
C, then one considers the constraint corresponding to an element ds of the
curve, the constraint forces being in direct proportion to this element; the contribution
of all these constraints is obtained calculating the corresponding torsor by integration
along the arc of curve
C. In general, if the surfaces S and
′
S
have in common a part 4
of the surface, so that
∈P 4
, the constraint forces are in direct proportion to the
element of area d4, while
ddd444=+RNT, ddd
rp
P
444=+MMM; the
torsor of these forces is
{}
{
}
d, d
PP
4
44
44τ=
³³ ³³
RRM, where R and
P
M
are
vector functions.
We assume now that also the rigid solid
′
S
(hence, the surface
′
S
too) is in motion
with respect to the inertial frame of reference
′
R
. In this case, the velocity of the point
Q, which coincides with
′
≡PP
at any moment t , with respect to this frame, is given
by
QP P
PP
′′
=+ = +vvwvw where
P
w and
P
′
w , are the velocities of these points
with respect to the rigid solids
S and
′
S
, respectively, and one can write
()
PP
PP
′′
−=−−vv ww; because the second difference is contained in the common
tangent plane
1 , the difference
P
P
′
−vv has the same property. As well, if ω and
′
ω
are the instantaneous rotations of the rigid solid
S and
′
S
, respectively, with respect
to the frame of reference
′
R
, then
′
ω − ω
is the instantaneous rotation of the rigid
solid
S relative to the rigid solid
′
S . The forces of friction exerted by
′
S
upon S
are expressed also by the torsor
{
}
P
4
τ R , which is decomposed analogously, being
MECHANICAL SYSTEMS, CLASSICAL MODELS
474
led to the same inequalities (17.1.17). If a relative sliding, rolling and pivoting takes
place, then the relations (17.1.17') read
()
PP
M
′
=− −Tvv,
()
rr
tt
M
′
=− −M ω ω ,
()
ppnn
M
′
=− −M ω ω , ,, 0
rp
MM M > ,
(17.1.18)
where we have put in evidence the tangential and the normal components of the angular
velocities. Corresponding to the theorem of action and reaction, the rigid solid
S acts
upon the rigid solid
′
S
by forces the torsor of which is
{
}
,
P
′′
RM , so that
′
+=
RR 0,
PP
′
+=
MM 0; as well, the decompositions
′′′
=+
RNT,
pr
P
′′′
=+
MMM,
′
+=
NN 0,
′
+=
TT 0,
pp
′
+=
MM 0,
rr
′
+=
MM 0 take
place too.
The formula (14.1.37) allows to express the elementary work of the forces which rise
on the contact surface 4 of the rigid solids
S and
′
S
in the form
()
()
ddd
PP
PP
Wt t
′′
′′′
=⋅+ ⋅ + ⋅ + ⋅
Rv M R v Mω ω
()
()
[
]
d
PP
P
t
′
′
=⋅ − + ⋅
Rv v M ω − ω ;
(17.1.19)
one can notice that this work corresponds to the motion of the rigid solid
S with
respect to the rigid solid
′
S
. Decomposing R,
P
M and ω so as to obtain the normal
and the tangential components and observing that
()
0
P
P
′
⋅− =Nv v (the difference
P
P
′
−vv is contained in the plane 1 ),
()
-0
tt
P
′
⋅=
M ω ω ,
()
-0
rnn
′
⋅=
M ω ω ,
it results
()
()( )
[
]
dd
rpnn
tt
P
P
Wt
′
′′′
=⋅ − + ⋅ − + ⋅ −
MTv v M ω ω ω ω
()
()( )
2
22
d0
rpnn
tt
P
P
tMMM
′
′′
ªº
=− − + − + − <
¬¼
vv
ω ω ω ω ,
(17.1.19')
where we took into account the relations (17.1.18). Hence, the elementary work of the
friction forces in case of the contact of two rigid solids is negative. Taking into account
the formula (14.1.37), we get the power of these forces in the form
()
()
PP
P
P
′
′′
=⋅ − + ⋅ −
ω ωRv v M ,
(17.1.19'')
quantity which – obviously – is negative too.
We mention that, in a first approximation, the effect of the couples of rolling and
pivoting can be neglected.
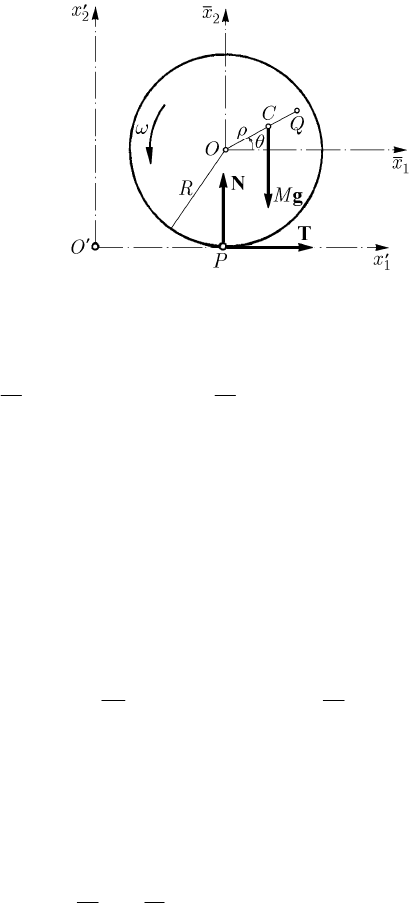
17.1.2.2 Painlevé’s Paradox
Painlevé called attention to some contradictions in the study of the motion of a non-
homogeneous heavy circular disc, which moves in a vertical plane, laying on a fixed
rough horizontal straight line; thus, the motion is a plane-parallel one (see Sect. 14.2.2.7
too). Let be thus a non-homogeneous disc of centre
O, radius R and weight Mg, the
centre of gravity of which is at
C, of position vector ρ with respect to a movable frame
17 Dynamics of Systems of Rigid Solids
475
of reference
R of axes
12
Ox x
parallel to those of a fixed frame
′
R
of axes
′′′
12
Ox x ,
the horizontal axis
′′
1
Ox being tangent to the disc (Fig. 17.6). At the point of contact P
act the normal constraint force
N and the sliding friction force T. The velocity of the
point
C with respect to the frame
′
R
is given by
CO
′′
+×
v=v ω
ρ
, where the
angular velocity
ω corresponds to a positive rotation.
Fig. 17.6 Painlevé’s paradox
The theorem of motion of the mass centre gives the equation of motion
()
2
d
d
O
Mv T
t
XS
′
−=,
()
1
d
d
MNMg
t
XS =−
.
(17.1.20)
As well, the theorem of moment of momentum with respect to a frame of Koenig leads
to
()
21
C
IRTNXSS=+ −
,
(17.1.20')
where
=
2
CC
IMi
is the central moment of inertia with respect to an axis parallel to the
′′
3
Ox -axis, while
C
i is the corresponding radius of the gyration.
Eliminating
X
between the second equation (17.1.20) and (17.1.20'), we get (we
mention that
()
==−=−
12
dcos/d sintSSR SRRXS
)
()
[]
1
2
221
0
C
N
RTN g
IM
S
SX S S−+ + − −+=
,
a relation which must take place at the initial moment too. We assume that at this
moment
=
1
SS, =
2
0S , the centre C being on the
1
Ox -axis; as well, we take
=
0
0X
and we consider that 0
O
v
′
< , so that =TfN (we have
0N >
). Hence, at
the initial moment, the relation
()
2
1
C
N
fR g
M
i
S
S
ªº
−−=
«»
¬¼
(17.1.21)
MECHANICAL SYSTEMS, CLASSICAL MODELS
476
must take place.
Assuming that the non-homogeneity is obtained by attaching to a homogeneous disc
of radius
R and mass
0
M a second homogeneous disc of radius r and mass
Q
M at the
point
Q, situated at the distance a from the centre O, the relation of static moments
gives
()
QO
Ma MSS−= ; with the aid of the non-dimensional ratio =
0
/
Q
MMF it
results
[
]
/(1 ) aSF F=+. According to the Huygens – Steiner theorem (formula
(3.1.113)), we may write
()
()
=+++−
ªº
¬¼
2
222 2
0
/2 /2
CQ
Mi M R M r aSS,
wherefrom
()
{
}
2222
11
12 1
C
iRra
F
FF
=++
++
.
We obtain thus the ratio
()
()
()()
()
() ()
2
222
1/ /
2
11/ 2/
C
faR aR
fR
i
rR aR
FF
S
ISF
FF
+−
=−=
ªº
++ +
¬¼
. (17.1.21')
We observe that one can find a technical solution so that the subunitary non-
dimensional ratio
/rR be sufficiently small, the subunitary non-dimensional ratio
/aR be close to 1/2, the coefficient of sliding friction be sufficiently great, while the
non-dimensional ratio F be superunitary, sufficiently great, so that
1I > . In this case, it
results from (17.1.21) that one must have
0N < , contradicting thus the Coulombian
model of sliding friction.
F. Klein showed later that the motion considered by Painlevé does not satisfy the
continuity hypotheses assumed in the Newtonian modelling of mechanics relative to the
initial conditions. As a matter of fact, at the initial moment intervenes an impulse which
modifies the static laws assumed for the friction, the deterministic aspect of mechanics
being thus preserved.
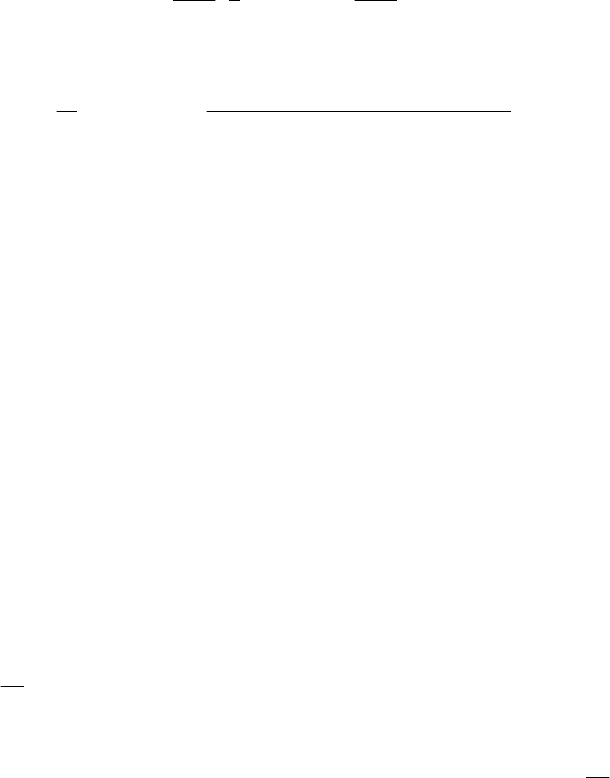
17.1.2.3 Motion of a Rigid Solid Which Slides Frictionless on a Fixed Plane
Let us consider a rigid solid S, bounded by the surface S, which slides without friction
on a fixed plane
P, remaining during the motion in contact to this one. We assume that
the fixed frame of reference
′
R
has the axes
′′
1
Ox and
′′
2
Ox contained in this plane,
the
′′
3
Ox -axis being normal to the plane and directed towards the part in which is the
rigid solid
S ; as well, we introduce the movable frame of reference R, having the
pole at the mass centre
C of the solid and being rigidly linked to it, and the movable
frame
R , with the pole at the same point and the axes parallel to the axes of the frame
′
R
. To specify the position of the rigid solid S, we determine the position of the
mass
C (three parameters
′′′
123
,,SSS) and the three angles Z, R and K of Euler (three
parameters), which give the position of the frame
R with respect to the frame R . But
these six parameters are not independent.
17 Dynamics of Systems of Rigid Solids
477
Indeed, let
()
=
123
,, 0fxx x be the equation of the surface S with respect to the
frame of reference
R, while
P
r and r are the position vectors corresponding to the
contact point
P and to an arbitrary point Q of the plane P (Fig. 17.7), respectively; the
equation of this plane is written in the form
()
grad 0
P
f−⋅ =rr .
(17.1.22)
Fig. 17.7 Motion of a rigid solid which slides frictionless on a fixed plane
The rigid solid
S being tangent to the plane P, there must exist a point
()
∈
123
,,xxx S at which the tangent plane be normal to
()
3
sin sin , sin cos , cosRK RK R
′
i , and the relations
()
,1 ,2 ,3
123
,,;,,
sin sin sin cos cos
fff
xxx
'ZRK
RK R K R
===
(17.1.23)
take place. As well, this tangent plane must pass through the pole
′
O
, so that we must
have
31
sin sinx RK
′
⋅= +ri
′
+=−
233
sin cos cosxxRK R S. The relations (17.1.23)
read
()
123
33
grad
grad
,,;,,
P
f
f
xxx
'ZRK
S
⋅
⋅
==
′′
⋅−
r
r
ri
.
(17.1.23')
Eliminating
123
,,xxx between the equations (17.1.23), (17.1.23') and taking into
account the equation of the surface
S, we find a relation of the form
()
33
,,SSZRK
′′
= ,
(17.1.24)
which is – in fact – the constraint relation of the rigid solid
S ; hence, only five
independent parameters are necessary to specify the motion, the rigid solid
S having
only five degrees of freedom.
MECHANICAL SYSTEMS, CLASSICAL MODELS
478

The theorem of motion of the mass centre, in projection on the
′′
j
Ox -axes,
= 1, 2, 3j , reads
2
2
d
d
M
t
B
B
S
′
′
=⋅
Ri, 1, 2B = ,
2
3
3
2
d
d
MN
t
S
′
′
=⋅+
Ri ,
(17.1.25)
where
R is the resultant of the given forces which act upon the rigid solid S ; the
constraint force
N at the contact point P is normal to the plane P, having thus only one
component
N along the
′′
3
Ox -axis, which is given by the third equation (17.1.25). The
theorem of moment of momentum written in the frame
R with respect to the movable
axis
3
Cx leads to Euler’s equation
()
+− =
33 2 1 12
3
C
III MXXX
,
(17.1.26)
where
3
C
M is the projection on
3
Cx of the moment with respect to C of the given
forces and where we notice that the moment of the constraint force
R has not a non-
zero component along this axis; as well, projecting the equation given by the theorem
of moment of momentum on the
3
Cx -axis (of fixed direction) and noting that
()
[
]
()
[
]
33
d/d d /d
CC
tt
′′
⋅= ⋅ω ωIiIi, we may write
()
11 22 33
3
d
sin sin sin cos cos
d
C
II IM
t
XRKXRK X R
′
++=,
(17.1.26')
where we have introduced the moment of the given forces with respect to this axis.
Taking into account the results in Sects. 14.1.1.6 and 14.1.1.7, we can write the theorem
of kinetic energy in the form
()
2
222
11 22 3 3
d
11
dd
2d 2
MIII
t
S
XXX
′
ªº
§·
′
+++=⋅
¨¸
«»
©¹
¬¼
ρ
R .
(17.1.27)
We obtain thus five scalar equations, which do not contain the unknown constraint
force
N, to determine the five independent parameters characterizing the motion of the
rigid solid
S .
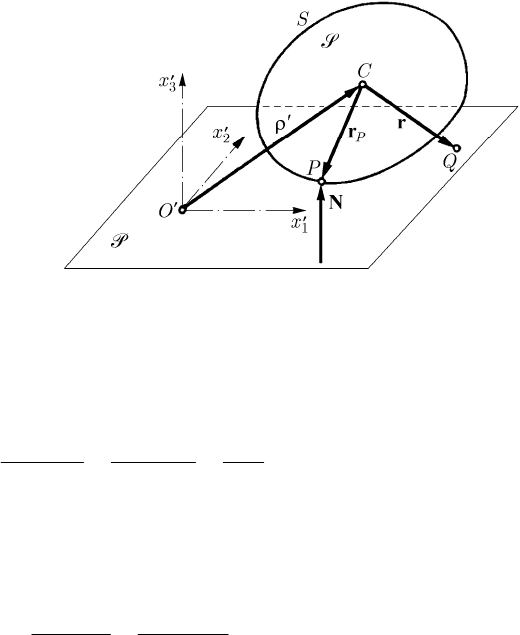
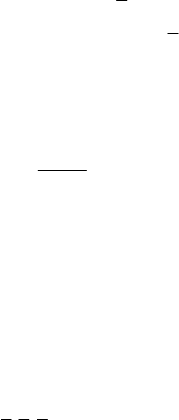
17.1.2.4 Motion of a Heavy Homogeneous Rigid Solid of Rotation Which Slides
Frictionless on a Fixed Horizontal Plane
We consider, in particular, the case of a rigid solid S for which the surface S is of
rotation with respect to the
3
Cx -axis, this axis being – at the same time – an axis of
symmetry for the corresponding central ellipsoid of inertia. These conditions are
fulfilled, e.g., by a heavy homogeneous rigid solid of rotation. We represent in Fig. 17.8
a meridian curve
C of a rigid solid S, the point Q being the projection of the mass
centre
C on the fixed plane P.
17 Dynamics of Systems of Rigid Solids
479
If we denote by R the angle formed by the straight line CQ with the
3
Cx -axis, then
we can write a relation of the form
3
()fSR
′
= ,
(17.1.28)
which is determined by the meridian curve
C. Choosing the
1
Ox -axis in the considered
meridian plane, the equation of the tangent
PQ is given by
13
sin cos ( )xx fRRR−=.
(17.1.29)
Because the meridian curve
C is the envelope of this tangent, the co-ordinates of the
contact point
P are obtained associating the equation
13
cos sin ( )xx fRRR
′
+=,
(17.1.29')
obtained by differentiation with respect to R ; this is just the equation of the straight line
which passes through
P and is parallel to the
′′
3
Ox -axis. The distance = PQE is, in
this case, given by
′
= ()fER
.
(17.1.29'')
Fig. 17.8 Motion of a heavy homogeneous rigid solid of rotation which
slides frictionless on a fixed horizontal plane
Taking into account that
M=Rg, corresponding to the own weight of the rigid
solid
S, the equations of motion (17.1.25) of the mass centre read
2
1
2
d
0
dt
S
′
=
,
2
2
2
d
0
dt
S
′
=
,
2
3
2
d
d
MMgN
t
S
′
=− +
.
(17.1.30)
MECHANICAL SYSTEMS, CLASSICAL MODELS
480

Hence, the point Q has a rectilinear and uniform motion in the plane P.
Firstly, we assume that – at the initial moment – the velocity of the mass centre is
directed towards the vertical line (along the
′′
3
Ox -axis) or vanishes; because the
horizontal component of this velocity is constant, it results that it will be – further –
equal to zero. Hence, the point
Q remains fixed, while the centre C oscillates along the
vertical of this point.
Applying the theorem of moment of momentum, we notice that
C
=M0. Because
==
12
IIJ
, the equation (17.1.26) leads to
=
3
0X
, hence ==
0
33
constXX . As
well, the equation (17.1.26') leads to the first integral
()
′
′
++ =
0
12 33
3
sin sin cos cos
C
JIKRX K X K X R ,
(17.1.31)
where
3C
K
′
′
is the constant component of the moment of momentum along the
3
Cx -axis, in the frame of reference
′
R
, with respect to the centre C. From (17.1.27)
we get a conservation theorem of mechanical energy in the form (in the considered
hypothesis we have
′′
==
12
d/d d/d 0ttSS )
()
()
2
2
3
22 0
12 33 3
d
22
d
MJ I Mgh
t
S
XX X S
′
§·
′
+++ =− +
¨¸
©¹
,
(17.1.32)
where
h is the energy integration constant.
Noting that the relation (17.1.28) allows to write
3
d/d ()tfSRR
′′
=
, ()=d/dffRR
′
,
and, using the relations (5.2.35), the first integrals (17.1.31), (17.1.32) take the form
(we associate the third relation (5.2.35))
=−
20
3
sin cosaZRBX R
,
[
]
22 2 2
sin 1 () ()cf bfZR RRCR
′
++ =−
,
+=
0
3
cosZRKX
,
(17.1.33)
where we have introduced the notations
3C
K
J
B
′
= ,
()
2
0
33
2hI
J
X
C
−
=
,
3
0
I
a
J
=>,
2
20
Mg
bgc
J
==>
, 0
M
c
J
=>;
we notice that B and C are constants which depend on the initial conditions, while
a, b
and
c depend only on the geometry and the mechanical properties of the rigid solid. We
obtain thus a system of differential equations which determine Euler’s angles
()tZZ= , ()tRR= and ()tKK= . Eliminating Z
between the first two equations,
we get the equation
[]
()
2
222 2 0
3
1()sin ()sin coscf bf aRRRCRRBXR
′
+=−−−
ªº
¬¼
,
(17.1.34)
17 Dynamics of Systems of Rigid Solids
481
which determines t as a function of R by a quadrature; if ()f R is a rational function of
sin R and cos R and if we take as a new variable
()
tan / 2R , then we obtain a
hyperelliptic integral. Taking into account the geometric significance of the function
()f R , specified by the relation (17.1.28), it results that the integral can take only finite
values. We notice that, for
= 0R and =RQ, the function in the second member of the
equation (17.1.34) takes negative values; for
=
0
RR, at the initial moment, the function
can take only a positive value, corresponding to a real value of
R
. It results
0
12
RRR<<, where
1
R and
2
R are two real zeros of the mentioned function. Thus, we
can make for the equation (17.1.34) a study analogous to that in Sects. 15.2.1.1 and
15.2.1.2. In this context, Puiseux showed that one can choose an initial angular velocity
0
3
X sufficiently great so that ()tR remain close to
0
R
at any moment t, the motion of
the rigid solid being thus stable. But Thomson showed that supplementary constraints,
instead to increase the stability of the rigid solid, could lead to a loss of the stability of
its motion (the rigid solid overturns).
We notice that the straight line
QN , normal to the meridian plane, is parallel to the
line of nodes; in this case, if we use the
′
1
Ox -axis, parallel to the fixed axis
′′
1
Ox , the
point
Q being chosen as pole, then the contact point P will be specified by the polar co-
ordinates E and
=+3/2DZ Q . The first equation (17.1.33) leads thus to the equation
()
0
3
2
1
cos
sin
aDBXR
R
=−
.
(17.1.35)
Eliminating d
t between the equations (17.1.34) and (17.1.35), we find an equation with
separate variables which gives the angle Dby a quadrature as a function of the angle R;
taking into account (17.1.29''), it results a relation which links D to E. We obtain thus
the curve described by the contact point
P in the fixed plane P.
If the mass centre is not projected at a fixed point
Q on the plane P, then we observe
that this point has a rectilinear and uniform motion; we report the relative motion to a
frame of reference
′′′
123
Qx x x , observing that this frame is inertial too. Hence, the
relative motion is governed by the same differential equations as the absolute motion; in
the movable frame, the point
Q is fixed, so that the problem is reduced to that studied
above.
As an application, one can study Gervat’s gyroscope (the “equilibrist foot”)
previously considered in Sect. 16.2.1.1.
17.1.2.5 Frictionless Motion of a Heavy Gyroscope on a Fixed Horizontal Plane
The gyroscope is a rigid solid for which the ellipsoid of inertia relative to a fixed point
of it is of rotation. In our case, the fixed point is the contact point
P (at a given
moment), assuming that the gyroscope is bounded at the vicinity of this point by a
MECHANICAL SYSTEMS, CLASSICAL MODELS
482
smooth surface, e.g., spherical (even if the radius of the respective sphere is very small);
if the gyroscope is a solid of rotation, then the
PC-axis is a principal axis of inertia,
being just the symmetry axis of it. If
=CP l
, then the function ()f R is given by (Fig.
17.9)
() cosflRR= .
(17.1.36)
As well, we have
= sinlER. (17.1.36')
Fig. 17.9 Frictionless motion of a heavy gyroscope on a fixed horizontal plane
The initial conditions (at the moment
= 0t
) read
12
(0) (0) 0XX==,
0
0
33
(0)XXX==,
0
(0)RR= ,
0
(0)ZZ= ;
we associate to them
(0) 0R =
(we use the second relation (14.1.15)) and the constants
of integration are obtained in the form
00
3
3
cos
C
KIXR
′
′
=
,
()
2
00
3
22coshI MglXR=+ ,
so that
()
3
2
00
sin cos cos
I
J
ZR X R R=−
,
()
()
22 22 2
0
2
sin 1 sin cos cos
MMgl
l
JJ
ZR RR R R++ = −
.
(17.1.37)
17 Dynamics of Systems of Rigid Solids
483