Teodorescu P.P. Mechanical Systems, Classical Models Volume II: Mechanics of Discrete and Continuous Systems
Подождите немного. Документ загружается.


This result can be used, e.g., in the study of the immobile flight of the aircraft with
vertical take-off (we make
CC
==va0 and = 0ω ).
Introducing the relative acceleration
22
/ t∂∂ρ of the mass centre C of the
mechanical system, as well as the Coriolis acceleration
2
C
× wω
, we obtain the
equation of motion of this centre with respect to the inertial frame of reference
′
R
in
the form
2
2
11
d
22
d
ei
n
n
C
hh ll
ee
ii
C
hl
MQQ MM
tt
t
==
∂
∂
=+ − − − ×+ + ×
∂
∂
∑∑
u
H
Rw w H w
ρ
ωω
,
(16.3.48)
where
C
u is the absolute velocity of the centre C.
We decompose the resultant of the given forces in the form
0
p
=+RR R, where
p
R is the resultant of the forces of static pressure, while
0
R is the resultant of the
other given external forces. If
0
p is the static pressure on the surface S of the outer-
covering of the aircraft, then we will have
0
11
d
ei
n
n
hh ll
ee
ii
S
hl
Sp A A
==
⎛⎞
=+
⎜⎟
⎝⎠
∑∑
∫∫
pnn,
where
h
e
A and
l
i
A are the areas of the sections of entrance and exit, respectively,
supposed to be plane, while
h
e
n and
l
i
n are the unit vectors of the corresponding
external normals. Denoting by
h
e
p and
l
i
p the mean pressure on the same surfaces of
entrance and exit, respectively, it results
d
h
e
hhh
eeee
S
SpA=−
∫∫
pn, d
l
i
lll
iiii
S
SpA=−
∫∫
pn.
Finally, we can write
() ()
00
11
ei
n
n
hhh lll
peee
iii
hl
ppA ppA
==
=− +−
∑∑
Rnn
.
(16.3.49)
The equation of motion of the mass centre (16.3.48) becomes thus
2
0
2
d
2( )
d
C
C
MMM
tt
t
∂
∂
=+−+ −×−
∂
∂
u
H
RT H w
ρ
ω
,
(16.3.50)
where the force of traction developed in the aeroreactive system of propulsion has been
introduced in the form
() ()
1
00
11
ei
n
n
hh h hh ll l l
ee e ee
ii i ii
hl
QppA QppA
==
=+−−+−
⎡
⎤⎡ ⎤
⎣
⎦⎣ ⎦
∑∑
Tw n w n.
(16.3.50')
16 Other Considerations on the Dynamics of the Rigid Solid
453
We mention that the supplementary terms (excepting the forces
0
R
and T) which
appear in the equation (16.3.50) can present a particular interest, e.g., in the study of the
motion and of the stability of the vehicles with a vertical take-off-landing. If, in
particular, the vehicle is fitted out with rocket motors, then one takes
0
h
e
Q = , 0
h
e
p = ,
1,2,...,
e
hn= , in the expression of the force of traction.
Applying the theorem of momentum for the current of fluid which enters through the
section
h
e
S , in case of a motion of rectilinear and uniform translation, the flow is
stationary and we can write
0
()()
hh hhh
ee c eee
QppA++− =wv n0, so that the function
of traction becomes
()
0
1
i
n
ll l ll
ec
ii i ii
l
QQppA
=
=− − − −
⎡
⎤
⎣
⎦
∑
Tv w n
.
(16.3.50'')
16.3.3.3 The Motion About the Centre of Mass
We notice that the position of a particle of solid, liquid, air or
gas is specified by
O
′′ ′
=+=+
rr r r
ρ
, where
r
is the position vector in a Koenig
frame of reference, its absolute velocity being written in the form
=+uvw, where
the velocity of transportation is given by
()
OO
′′
=+×=+×+
vv rv rωω
ρ
C
=+×vrω . The moment of momentum with respect to the pole O
′
, in the frame
′
R , reads
CC
O
′
′′′
=× + +KHKKρ
, d
C
V
Vμ=×
∫∫∫
Krw, ()d
C
V
Vμ=××
∫∫∫
Krrω ,
(16.3.51)
where
C
K
and
C
K are the momenta of momentum with respect to the mass centre C,
in the frame
R and in the frame
()C
R
of Koenig, respectively, and where we have
taken into account that the static moment of the mechanical system
S with respect to
the mass centre vanishes. Differentiating with respect to time, in the fixed frame of
reference, and taking into account that
CCC
=+uvw
, /
C
t=∂ ∂w
ρ
and
C
M
′
=+HH v (we use the expressions of the velocities u and v, as well as the same
property of the static moments), we obtain
d
dd
d
dddd
O CC
CCCC
M
tttt
′
′
′
′
=×+ ×+×+× + +
K
KK
H
wH wv vH
ρ , (16.3.51')
We can define the centres
E and I by the formulae
1
1
e
h
n
h
e
EE
e
h
Q
Q
=
=
∑
ρρ
,
1
1
i
l
n
l
i
II
i
l
Q
Q
=
=
∑
ρρ
,
(16.3.52)
MECHANICAL SYSTEMS, CLASSICAL MODELS
()d
()d
e
h
e
h
e
h
e
aa a
S
E
aa
S
S
S
μ
μ
⋅
=
⋅
∫∫
∫∫
rwn
wn
ρ
,
()d
()d
i
l
i
l
i
l
i
gg g
S
I
gg
S
S
S
μ
μ
⋅
=
⋅
∫∫
∫∫
rwn
wn
ρ ,
454
analogous to the formulae (16.3.35). Noting that
EE
=−
ρρρ
,
II
=−
ρρρ
and
taking into account (16.3.37), we get
11
()d ()d
ei
e
i
hl
e
i
n
n
aa a gg g
C
SS
hl
SSMμμ
==
⋅+ ⋅=−
∑∑
∫∫ ∫∫
rwn rwn H w.
In this case, the sums of the integrals in the formula (16.3.32) become
11
()d ()d
ei
ee
ii
hl
e
i
n
n
aaaa gggg
SS
hl
SSμμ
==
′′
×⋅+×⋅
∑∑
∫∫ ∫∫
ru w n ru wn
d
()
d
CC
M
t
′
⎛⎞
′
=× − − × −
⎜⎟
⎝⎠
H
RvHw
ρ
11
()d ()d
ei
ee
ii
hl
e
i
n
n
aaaa gggg
SS
hl
SSμμ
==
+× ⋅+× ⋅
∑∑
∫∫ ∫∫
rw w n rw wn
11
()( )d ()( )d
ei
e
i
hl
e
i
n
n
aaaa gggg
SS
hl
SSμμ
==
+×× ⋅+×× ⋅
∑∑
∫∫ ∫∫
rrwn rrwnωω,
where we took into account the above result, the formula (16.3.31) and the expressions
of the position vectors
a
′
r and
g
′
r , as well the decomposition of the velocities
e
a
u
and
i
g
u . Replacing in (16.3.32) and taking into account the previous results and the relation
(16.3.51'), we get, finally,
dd
dd
CC
CC
tt
=−×−
KK
MwH
11
()d ()d
ei
ee
ii
hl
e
i
n
n
aaaa gggg
SS
hl
SSμμ
==
−× ⋅−× ⋅
∑∑
∫∫ ∫∫
rw w n rw w n
11
()( )d ()( )d
ei
e
i
hl
e
i
n
n
aaaa gggg
SS
hl
SSμμ
==
−×× ⋅−×× ⋅
∑∑
∫∫ ∫∫
rrwn rrwnωω
, (16.3.53)
where we have noticed that
C
O
′
′
=+×
MM R
ρ
.
To give to this equation of motion of rotation about the mass centre a form as useful
as possible from the point of view of the practical calculation, we mention that
d
d
CC
C
tt
∂
=+×
∂
KK
K
ω ,
d
d
CC
C
tt
∂
=+×
∂
KK
K
ω ,
(16.3.54)
where we have used the derivatives with respect to the non-inertial frame of reference
R. Noting that
CC
=KIω , we have
16 Other Considerations on the Dynamics of the Rigid Solid
455
const const
C
CC C
tt t
==
∂∂ ∂
⎛⎞ ⎛⎞
=+
⎜⎟ ⎜⎟
∂∂ ∂
⎝⎠ ⎝⎠
I
KK K
ω
,
const
C
C
C
t
=
∂
⎛⎞
=
⎜⎟
∂
⎝⎠
I
K
I
ω ,
const
CC
tt
=
∂∂
⎛⎞
=
⎜⎟
∂∂
⎝⎠
KI
ω
ω ,
(16.3.55)
because the mechanical system
S is of variable mass.
We can decompose the resultant moment of the given forces in the form
0
p
CC C
=+MM M, where
p
C
M is the resultant moment of the forces of pressure
while
0
C
M is the resultant moment of the other external forces.
Noting that
()d
ee
aa a
Sμ ⋅wwn and ()d
g
i
i
gg
Sμ ⋅wwn can be considered
elementary forces due to
the capture of the particles of air and to the detachment of
particles of gas, respectively, through an elementary surface of area
dS, we introduce
the moment of traction in the form
11
()d ()d
ei
ee
ii
hl
p
e
i
n
n
aaaa gggg
T
C
SS
hl
SSμμ
==
=− × ⋅− × ⋅
∑∑
∫∫ ∫∫
MM rw wn rw wn.
(16.3.56)
As well,
1
const
()( )d
e
e
h
e
n
C
aaaaa
S
h
MS
t
μ
=
=
∂
⎛⎞
=− − × × ⋅
⎜⎟
∂
⎝⎠
∑
∫∫
K
rrwn
ω
ω
1
()( )d
i
i
l
i
n
gggg
S
l
Sμ
=
−×× ⋅
∑
∫∫
rrwnω
(16.3.57)
is the moment of gas-dynamical damping. The equation of motion (16.3.3) takes thus
the form
0
const
C
CC
a
T
CC C C
tt
=
∂∂
⎛⎞
+× = + − −× + − ×
⎜⎟
∂∂
⎝⎠
I
KK
KM M KMwHωω
,
(16.3.58)
generalizing Euler's equations.
Considering that the aircraft is a system of constant mass and assuming that
/
C
t∂∂=K0, we can write
0
const
C
C
T
CC C
t
=
∂
⎛⎞
+× = + + ×
⎜⎟
∂
⎝⎠
I
K
KM MKωω
,
(16.3.58')
where the last term of gyroscopic nature corresponds to solid masses which give raise
to the spin. Comparing the equations (16.3.58) (where we make
/
C
t∂∂=K0) and
MECHANICAL SYSTEMS, CLASSICAL MODELS
456
(16.3.58'), we notice that, considering that the aircraft is a system of variable mass,
appears the supplementary moment
sa
C
=+×MMHw
. (16.3.59)
Because the vectors
H and
C
w are, often, nearly parallel, it results
a
S
≅MM.
Hence,
s
=M0 if = 0ω ; the condition in which takes place a motion of translation
are thus formally the same, immaterial if the mechanical system
S is of constant or of
variable mass.
If we suppress the capture of particles of air, then the equation (16.3.58) becomes the
equation of motion of the rocket about the centre of mass.
16 Other Considerations on the Dynamics of the Rigid Solid
457
Chapter 17
Dynamics of Systems of Rigid Solids
A mechanical system S can be formed of a finite number (let be n) of rigid solids and
of a finite number (let be p) of particles, its position with respect to an inertial frame of
reference
′
R being specified by means of += +633(2 )np npparameters; hence,
such a system has
+3(2 )np degrees of freedom. In the case in which the system S is
subjected to m constraints, the number of degrees of freedom is reduced with m units,
equating
+−3(2 )np m. We study, in this chapter, the motion of the mechanical
system
S, free or with constraints, including the case in which appear discontinuities
(the collision problem). The results thus obtained will be applied to some problems of
dynamics of machines.
17.1 Motion of Systems of Rigid Solids
After some results with a general character, one considers the contact problem of two
rigid solids; in this order of ideas, one studies various particular cases too.
17.1.1 General Results
In what follows, we make some general considerations concerning the motion of
systems of rigid solids; a special attention is given to some particular cases (the double
pendulum and the sympathetic pendulum).
17.1.1.1 General Considerations
Let be, in general, a free mechanical system
S, formed of the rigid solids S
k
,
= 1,2,..., ,kn
and of the particles
i
P , of position vectors
′
r
i
,
= 1,2,...,ip
, with
respect to an inertial frame of reference
′
R , of pole
′
O ; the elements of this system
are acted upon by given external forces, originated in other systems, and by given
internal forces, corresponding to their reciprocal actions. The rigid solid
S
l
acts upon
the rigid solid
S
k
by a set of forces (analogously modelled as sliding vectors) of torsor
{
}
RM,
kl kl
, while the rigid solid S
k
acts upon the rigid solid S
l
by a set of forces
(analogously modelled) of torsor
{
}
RM,
lk lk
; corresponding to the theorem of action
and reaction (the Theorem 12.1.7 stated for a continuous mechanical system, can be
applied in the case of a system of rigid solids too), we can write
P.P. Teodorescu, Mechanical Systems, Classical Models,
© Springer Science+Business Media B.V. 2009
459
{
}
RM,
kl kl
{
}
+=RM 0,
lk lk
, hence +=RR 0
kl lk
, +=MM 0
kl lk
, ≠kl,
=, 1,2,...,kl n
. The particles
i
P and
j
P are interacting with the forces F
ij
(applied
upon the particle
i
P ) and F
j
i
(applied upon the particle
j
P ), respectively, having as
support the straight line
ij
PP and verifying the relation +=FF 0
ij ji
, ≠ij,
=, 1,2,...,ij p; these forces are modelled as bound vectors. Analogously, if the rigid
solid
S
k
acts upon the particle
i
P with a force
ik
Φ (modelled as a bound vector), then
the particle
i
P reacts upon the rigid solid S
k
with a force
ki
Φ (modelled as a sliding
vector), these forces having the same support and verifying the relation
+=0
ik ki
ΦΦ ,
≠ik,
= 1,2,...,ip
,
= 1,2,...,kn
, as free vectors. As in the case of a discrete system
of particles (see Sect. 11.1.1.4 too), applying the principle of action of forces (the
theorem of torsor in case of a rigid solid; see Sect. 14.1.1.7 too), we can write the
equations of motion of the free mechanical system
S in the form (for the sake of
simplicity, it is convenient to denote by “prime” the sums of terms with two indices, if
the case of equal indices is excluded)
==
=+ +
∑∑
rF F
11
''
p
n
ii ij
ik
jk
m
Φ , = 1,2,...,ip,
(17.1.1)
==
′
=+ +
∑∑
HR R
11
''
p
n
k k ki kl
il
Φ
, = 1,2,...,kn,
′′
==
′′
=+×+
∑∑
KM r M
11
''
p
n
i
ki kl
Ok Ok
il
Φ
, = 1,2,...,kn,
(17.1.1')
where
F
i
is the resultant of the given external forces which act upon the particle
i
P ,
{
}
′
RM,
k
Ok
is the torsor of the given external forces which act upon the rigid solid
S
k
, while
′
H
k
and
′
′
K
Ok
represent the momentum and the moment of momentum,
respectively, of the rigid solid
S
k
, with respect to the pole
′
O , in the frame of
reference
′
R
. In general, the given forces can depend on the position vectors
′
r
i
,
= 1,2,...ip, on the position vectors
′
r
Ok
and on Euler’s angles
k
ψ ,
k
θ ,
k
ϕ , which
specify the position of a point of the rigid solid
S
k
, = 1,2,...,kn, as well as the
motion of rotation about this one.
The mechanical system
S is considered to be free, so that the +2np vector
equations (17.1.1), (17.1.1') (or, in components, the
()
+32np scalar corresponding
equations) can determine the
()
+32np parameters (co-ordinates and Euler’s angles),
which specify its position. These equations are completed by the initial conditions (at
the moment
=
0
tt), i.e.: the positions and the velocities of the particles, as well as the
positions and the velocities (the parameters which specify them) of the rigid solids
which form the mechanical system
S. In this case too, starting from the Theorem
11.1.1, corresponding to a system of particles, and taking into account the Theorem
14.1.12, corresponding to a rigid solid, we can state a theorem of existence and
MECHANICAL SYSTEMS, CLASSICAL MODELS
460

uniqueness of Cauchy-Lipschitz type for the free discrete mechanical system considered
above.
In the case of a mechanical system
S subjected to constraints (external or internal,
because of the contact between the rigid solids or because of other causes), one must
introduce also the constraint forces (external or internal). If a particle
∈ S
i
P , e.g., is
constrained to move on a surface
∈ SS , then the constraint is internal, while if
∉ SS , then the constraint is external. Analogously, if a rigid solid ∈ S
k
S remains
in contact with another rigid solid appears a torsor of internal or external constraint
forces, as this solid belongs or not to the mechanical system
S. The holonomic
constraint relations are of the form
() () ()
() () ()
()
′′′′ ′ ′
=
123
123
,,,,,,,,;0
kkk
iii
kk k
OOO
fxxxx x x t
B
ZRK
,
= 1,2,...,qB
,
(17.1.2)
the non-holonomic constraints being expressed by the relations
() () () () () ()
(
() () ()
′′′′′′′ ′ ′
123123
123
,,,,,, , ,
kkk
iiiiii
OOO
gxxxxxxx x x
C
,
() () ()
)
′′′
=
123
, , ,,,,,,; 0
kkk
kk k kk k
OOO
xxx tZRKZRK
, = 1,2,...,rC ,
(17.1.2')
linear in the linear and angular velocities. Obviously, the number of the unknowns
increases by
=+mqr, corresponding to the constraint forces; but also the number of
relations which link the unknown functions increases analogously (by the relations
(17.1.2), (17.1.2')). We can enounce a first basic problem (the direct problem), the
solution of which is unique in certain conditions, sufficiently large (e.g. the Cauchy-
Lipschitz theorem). A second basic problem (the inverse problem), as well as the mixed
basic problem have not, in general, a unique solution; to have uniqueness, it is
necessary to impose some supplementary conditions (see Sect. 11.1.1.4 too).
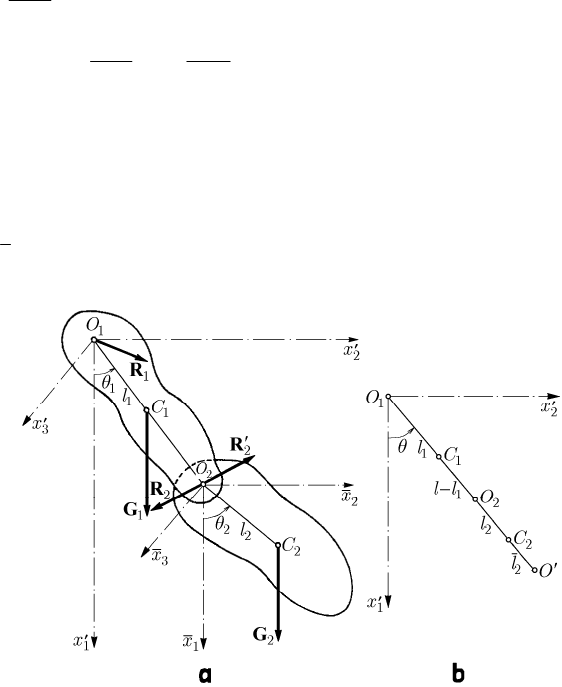
17.1.1.2 The Double Pendulum
The double pendulum is a mechanical system
S formed of two rigid solids S
1
and
S
2
, subjected to the action of the own weights =Gg
11
M and =Gg
22
M at the
centres of mass
1
C and
2
C , respectively; the rigid solid S
1
oscillates about a fixed
horizontal axis
′
13
Ox , while the rigid solid S
2
oscillates about an axis
23
Ox , parallel
to the first axis and rigidly connected to the solid
S
1
. We assume, for the sake of
simplicity, that the vertical plane normal to these axes, which passes through the poles
1
O and
2
O , is a plane of geometric and mechanical symmetry for the mechanical
system
S, hence containing also the mass centres
1
C
and
2
C
; we assume that
∈
112
COO
too. We choose the
′
11
Ox -axis along the descendent vertical, the
′
12
Ox -axis
being horizontal; the axes
21
Ox
and
22
Ox
are chosen analogously. The position of the
system
S (the motion is plane-parallel, the point
1
O is fixed (two constraint relations),
while the point
2
O is moving on a fixed circle (one constraint relation), hence the
mechanical system has
()
⋅− + =23 2 1 3degrees of freedom) is specified by the
17 Dynamics of Systems of Rigid Solids
461
MECHANICAL SYSTEMS, CLASSICAL MODELS
distance =
12
OO l between the two poles (constant for a given double pendulum) and
by the angles
1
R and
2
R made by
11
OC and
22
OC , respectively, with the descendent
vertical; we notice
=
11 1
OC l , =
22 2
OC l too (Fig. 17.1,a). Upon the rigid solid S
1
act
the own weight
=Gg
11
M , the constraint force R
1
at
1
O and the constraint force R
2
,
exerted by the rigid solid
S
2
upon the rigid solid S
1
at the cylindrical hinge
2
O , while
upon the rigid solid
S
2
act the own weight =Gg
22
M and the constraint force
′
R
2
exerted by the rigid solid
S
1
upon the rigid solid S
2
at
2
O ; obviously, we
have
′
+=
RR 0
22
. We neglect the friction couples which appear on the axes
′
13
Ox
and
23
Ox . The motion of both centres of mass is given by the equation (the
differentiation takes place with respect to the fixed frame of reference)
Fig. 17.1 Double pendulum
=++gR R
11 1 1 2
MM
ρ ,
′
=+
gR
22 2 2
MM
ρ ,
where
()
′′
=+
ii
11 11 12
cos sinl RR
ρ
,
()()
′′
=+ ++
ii
212211222
cos cos sin sinll llRR RRρ
are the corresponding position vectors; projecting on the axes
′
11
Ox ,
′
12
Ox and
calculating the components of the accelerations, one obtain the components of the
constraint forces in the form
()
()
=− + +
2
11 1 1 2 1 1 1 1
cos sinRMlMlRR RR
()
()
−+−+
2
22 22 22 1 2
cos sinMl M M gRR RR
,
()
()( )
=+ − + −
22
12 1 1 2 1 1 1 1 2 2 2 2 2 2
cos sin cos sinRMlMl MlRR RR RR RR
,
(17.1.3)
462
()( )
′
=− = + + + +
ªº
¬¼
22
21 21 2 11 11 2 22 22
cos sin cos sinRRMl l gRR RR RR RR
,
()( )
′
=− =− − + −
ªº
¬¼
22
22 22 2 1 1 1 2 2 2 2 2
cos sin cos sinRRMl lRR RR RR RR
.
(17.1.3')
Taking into account the Huygens-Steiner theorem (formulae (3.1.113), (3.1.113'), we
can write the moment of inertia of the rigid solid
S
1
with respect to the
′
13
Ox -axis in
the form
()
+
22
11 1
Ml i , where
1
i is the gyration radius corresponding to the mass
centre
1
C , taken with respect to an axis parallel to
′
13
Ox ; the moment of inertia of the
rigid solid
S
2
with respect to an axis parallel to the
23
Ox , which passes through the
mass centre
2
C , is given by
2
22
Mi , where
2
i has an analogous significance. The
theorem of moment of momentum for the rigid solid
S
1
, in the frame
′
R , with
respect to the
′
13
Ox -axis, reads
()
()
+=− + −
22
11 1 1 11 1 22 1 21 1
sin cos sinMl i Mgl lR RRRRR
.
As well, writing the theorem of moment of momentum for the rigid solid
S
2
, in a
frame of reference of Koenig, with respect to an axis parallel to the
′
13
Ox -axis, we get
()
′′
=−
2
22 2 2 21 2 22 2
sin cosMi l R RRRR
.
Replacing the constraint forces given by (17.1.3'), it results the system of differential
equations of second order
() ()
+−−−+ =
2
11 2 1 2 2 1 2 1
cos sin sin 0
g
l
BR R R R R R R C R
,
() ()
+−+−+ =
2
22 2 1 1 2 1 1 2
cos sin sin 0
g
l
BR R R R R R R R
,
(17.1.4)
where
()
++
=>
22 2
11
1
2
0
li l
ll
N
B ,
+
=>
22
22
2
2
0
li
ll
B
,
+
=>
1
2
0
ll
l
N
C
,
=
1
2
M
M
N
.
To determine the motion, one must add also the conditions
()
=
0
10 1
tRR,
()
=
0
20 2
tRR,
()
=
0
10 1
tRR
,
()
=
0
20 2
tRR
, where
0
1
R ,
0
2
R and
0
1
R
,
0
2
R
specify the
position and the velocity, respectively, of the double pendulum at the initial moment.
Being impossible to give an exact solution to this non-linear problem, we will
consider the case of small motions for which
()
−≅
21
cos 1RR , ≅
11
sin RR,
≅
22
sin RR and
()
−≅−
21 21
sin RR RR; we find thus
()
+− − + =
2
11 2 2 1 2 1
0
g
l
BR R R R R CR
,
()
2
22 1 2 1 1 2
0
g
l
BR R R R R R++ − + =
.
(17.1.4')
17 Dynamics of Systems of Rigid Solids
463