Teodorescu P.P. Mechanical Systems, Classical Models Volume II: Mechanics of Discrete and Continuous Systems
Подождите немного. Документ загружается.

()
′
+× = − ×
IIMa
OOOO
M
ωω ω ρ .
(14.1.69')
The equation (14.1.69') specifies the rotation about the point O (the vector ), then the
equation (14.1.69) determines the constraint force
R ; if
()
=MM
123
,, , , , ;
OO
tψθϕω ω ω , then we associate to the vector equation (14.1.69')
the system of scalar equations (14.1.53'') too. We have thus introduced three relations of
finite constraints of the form (14.1.63) (
= 3p , = 0m ) and three scalar components of
the constraint force (
= 3q ).
In particular, if the pole O is fixed, then we have
′′′
===
rva0
OOO
, obtaining the
equations of motion of the rigid solid with a fixed point. If we introduce in these
equations also the influence of the complementary force
′
−
∫∫∫
ra() d
O
V
Vμ at the
centre of mass C, then we find again the system of equations (14.1.69), (14.1.69') (one
passes from the action of this force at C to the corresponding torsor at O).
If the point O is constrained to stay on a given perfectly smooth surface S (in
general, movable), then the constraint relation (14.1.67) (
= 1p , = 0m ) is written in
the form
()( )
′′′′
==
r
123
;,,;0
OOOO
ftfxxxt .
(14.1.70)
The liberation of constraints axiom leads to a constraint force
=R grad fλ , λ non-
determinate scalar, normal at O to the surface S (the moment
′
=
M0
O
); the equations
of motion (14.1.60), (14.1.60') of the rigid solid take the form
()
[]
′′
+× +× +× = +
vv Rgrad
OO
Mfλ
ωωρωρ ,
(14.1.71)
()()
′′
×+×++× =
vvI IM
OOO OO
M
ρω ωωω.
(14.1.71')
To determine the vector unknowns
′
v
O
and and the unknown scalar λ ( = 1q ; 7
scalar unknowns) we have the vector equations (14.1.71), (14.1.71') and the scalar
equation (14.1.70) (7 scalar equations).
As well, if the point O stays on a perfectly smooth curve C (in general, movable),
then the constraint relations (14.1.67) (
= 2p , = 0m ) become
()( )
′′′′
==
r
123
;,,;0
lO l O O O
ftfxxxt , = 1,2l .
(14.1.72)
As in the previous case, we can write the equations (14.1.60), (14.1.60') in the form
()
[]
′′
+× +× +× = + +
vv R
1122
grad grad
OO
Mffλλ
ωωρωρ ,
(14.1.73)
()()
′′
×+×++× =
vvI IM
OOO OO
M
ρω ωωω.
(14.1.73')
233
14 Dynamics of the Rigid Solid
ω
The vector equations (14.1.73), (14.1.73') and the scalar equations (14.1.68) (8 scalar
equations) determine thus the vector unknowns
′
v
O
and and the scalar unknowns
1
λ
and
2
λ
( = 2q ; 8 scalar unknowns).
Let us suppose that the points O and
1
O
of the rigid solid have known motions,
given by the equations
′′
=
rr()
OO
t ,
′′
=
rr
11
()
OO
t
,
(14.1.74)
with respect to the inertial frame of reference
′
R ; because the points O and
1
O are at
an invariable mutual distance (equal to l), the equations (14.1.74) are not independent,
and the relation
′′
−=
⎡⎤
⎣⎦
rr
1
2
2
() ()
OO
ttl
(14.1.74')
takes place. Hence, there remain five independent finite constraint relations (
= 5p
,
= 0m ). As a matter of fact, the motion of any point
2
O on the straight line ≡
1
OOΔ
is determined by the position vector
()
′′ ′′
=+ −
rr rr
21
OO OO
λ , λ scalar; the case thus
considered is identical to that in which a straight line
Δ rigidly linked to the solid (e.g.,
an axis of the frame of reference
R ) describes a given motion, one of the points of this
axis (e.g., the pole O) having a given motion too. Using the axiom of liberation of
constraints, we introduce the constraint forces
′
R and R
1
at the points O and
1
O ,
respectively; the torsor of these forces at the point O is
()
{
}
′′′
+−×
RRr r R
1
11
,
OO
.
The equations of motion (14.1.60), (14.1.60') are written in the form (the first equation
(14.1.74) allows to calculate the acceleration
′′
=
aa()
OO
t too)
()
[]
′′
×+× × = − + +
RaRR
1
O
MM
ωρ ω ωρ ,
(14.1.75)
()
()
′′′
+× = − × + − ×
IIMarrR
1
1
OOOOOO
M
ωω ω ρ ,
(14.1.76)
with respect to the non-inertial frame
R.
For the three vector unknowns ,
′
R and R
1
of the problem (
= 6q
; 9 scalar
unknowns) we can use the vector equations (14.1.75), (14.1.76) and the second
equation (14.1.74), together with the relation (14.1.74') (8 scalar equations). We can
write the constraint relation also in the differential form (the velocity of the point
1
O
expressed with respect to the velocity of the point O)
()
′′ ′′
=+× −
vv rr
11
OO OO
ω ;
(14.1.74'')
14.1.2.3 Rigid Solid Two Points of Which have Imposed Motions
234
MECHANICAL SYSTEMS, CLASSICAL MODELS
ω
ω

a scalar product by
′′
−
rr
1
OO
leads to an identity, so that there result only two scalar
relations. Hence, the number of unknowns is with a unity greater than the number of
equations, the corresponding system being once indeterminate (as in the case of the
static equilibrium of the rigid solid with a fixed axis).
Choosing the axis
1
OO as axis
3
Ox , we can write the equations (14.1.75), (14.1.76)
in components, in the form
()
[]
1
2
23 32 1 11 22 33 1 1 1 11
O
MRMaRRωρ ωρ ω ωρ ωρ ωρ ωρ
′′
−+ ++ − =− ++
,
()
[]
2
2
31 13 2 11 22 33 2 2 2 12
O
MRMaRRωρ ωρ ω ωρ ωρ ωρ ωρ
′′
−+ ++ − =− ++
,
()
[]
3
2
12 21 3 11 22 33 3 3 3 13
O
MRMaRRωρ ωρ ω ωρ ωρ ωρ ω ρ
′′
−+ ++ − =− ++
,
(14.1.75')
()
()
()
22
111 122 313 33 2223 232 3 1312 123
III II I IIωωω ωω ωωωωω+++− + −+ −
()
′′
=− − −
23 12
132
OOO
MMa a lRρρ ,
()
()
()
22
22 2 23 3 12 1 11 33 3 1 31 3 1 2 12 3 23 1
III II I IIωωω ωω ωωωωω+++− + −+ −
()
′′
=− − −
31 11
213
OOO
MMa a lRρρ ,
()
()
()
22
33 3 31 1 23 2 22 11 1 2 12 1 2 3 23 1 31 2
III II I IIωωω ωω ωωωωω+++− + −+ −
()
′′
=− −
12
321
OOO
MMa aρρ.
(14.1.76')
As well, the condition (14.1.74'') leads to
′′
=+
1
2
11
OO
vvlω ,
′′
=−
1
1
22
OO
vvlω ,
′′
=
1
33OO
vv.
(14.1.74''')
The first two equations (14.1.74'''), together with the last equation (14.1.76'), determine
entirely the vector . The last column of the matrix (3.2.11''') allows to specify Euler’s
angles
= ()tψψ and = ()tθθ in the motion of the Δ-line (if we know the direction
cosines of this line with respect to the frame of reference
R ); in this case, the relations
(5.2.35) allow to express the components of the vector as function of the angle of
proper rotation
ϕ. Replacing in the last equation (14.1.76'), this one becomes a
differential equation of second order in
ϕ; by integration, we get = ()tϕϕ and then
= ()
ii
tωω, = 1,2, 3i . The first two equations (14.1.76') determine the constraint
forces
11
R and
12
R , while the first two equations (14.1.75') give the constraint forces
′
1
R and
′
2
R ; the third equation (14.1.75') specifies the sum
′
+
313
RR of the last
unknown components, the character of the non-determination being thus put into
evidence. As in the statical case (see Chap. 4, Subsec. 2.1.3), the non-determination is
due to the modelling as a rigid adopted for the solid body.
If the axis
Δ is a principal axis of inertia, the axes
1
Ox
and
2
Ox
having the same
property, we have
===
23 31 12
0III , so that the system of equations (14.1.76')
takes the simplified form
235
14 Dynamics of the Rigid Solid
ω
ω
()
()
′′
+− = − − −
11 3 2 23 2 3 12
132
OOO
III MMaalRωωω ρρ
,
()
()
′′
+− = − − +
22 1 3 31 3 1 11
213
OOO
III MMaalRωωω ρρ
,
()
()
′′
+− = − −
33 2 1 12 1 2
321
OOO
III MMaaωωω ρρ
.
(14.1.76'')
In particular, if the points O and
1
O
are fixed, then we have
′′′
===
1
0
Oi Oi Oi
vva ,
= 1,2, 3i , while from the conditions (14.1.74''') it results ==
12
0ωω , =
3
ωω; we
obtain thus the motion of the rigid solid with a fixed axis.
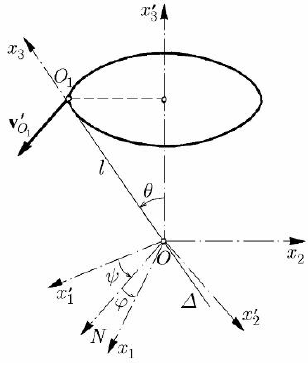
axis Δ of which passes through this point
Let us suppose, in particular, that the point O is fixed and that the straight line
Δ
describes a circular cone, having a motion of uniform rotation about the cone axis. To
simplify the computation, we take
′
≡OO
, the
′
3
Ox -axis being the axis of the cone.
The point
1
O describes a circle in a plane normal to the fixed axis
′
3
Ox . Introducing
Euler’s angles
ψ, θ, ϕ, the angular velocity of the point
1
O will be ψ
, so that the
velocity
′
v
1O
will be directed along the line of nodes ON , having the magnitude
′
=
1
sin
O
vlψθ
(Fig. 14.5); in components, there result
′
=
1
1
sin cos
O
vlψθϕ
,
′
=−
1
2
sin sin
O
vlψθϕ
. If we make
′′
==
12
0
OO
vv in (14.1.74''') or if we make = 0θ
(because
= constθ
) in the relations (5.2.35), then we obtain
=
1
sin sinωψθϕ
, =
2
sin cosωψθϕ
, =+
3
cosωϕψθ
.
We assume also that the axes
i
Ox , = 1, 2, 3i , are principal axes of inertia; in this case,
replacing in the third equation (14.1.76'') (we notice that
= constψ
, the rotation being
uniform, and that
′′
==
12
0
OO
aa ), one obtains the equation of motion
Fig. 14.5 Motion of a rigid solid a point O of which is fixed and an
236
MECHANICAL SYSTEMS, CLASSICAL MODELS

3
3
sin 2
O
M
k
I
ΦΦ+=
,
(14.1.77)
with the notations
2ϕΦ = ,
21
22
3
sin
II
k
I
ψθ
−
=
.
(14.1.77')
If
=
3
0
O
M (e.g., if the rigid solid is subjected to the action of the own weight, the
axis being a central principal axis of inertia), then the motion of rotation of the rigid
solid is determined only by the angle of proper rotation
()tϕϕ= , which is given by an
equation of the simple pendulum equation type.
More general, we can assume that a frictionless sliding of the rigid solid along the
Δ-axis takes place; the equations of this axis with respect to the inertial frame of
reference
′
R can be written, e.g., in the form (we put in evidence the point Ο on the
Δ-axis)
′′
=+
11
13
() ()
OO
xtxtαβ,
′′
=+
22
23
() ()
OO
xtxtαβ,
(14.1.78)
intervening thus two finite constraint relations; as above, knowing the motion of the
straight line
Δ, we can consider Euler’s angles ψ and θ as known, so that only the angle
of proper rotation
ϕ remains to be determined. We notice that, due to the frictionless
sliding, the constraint forces
′
R and
R
1
are normal to the Δ-axis. We have to
determine eight scalar unknowns
′′ ′
121112
,, , ,
Oi
RRR R x , = 1,2, 3i and ϕ, for which we
have eight equations (the equations (14.1.75'), (14.1.76'), where we make
′
==
313
0RR , and (14.1.78)), the problem being thus determined.
If in the particular problem considered above we have
′
=
i
1
13
3
()
O
OO x t
, then it
results
11
3
() ()sin
OO
txtθ
′′
=
v
ψ , wherefrom
′′
=
11
13
sin cos
OO
vxψθϕ
,
′′
=−
11
23
sin sin
OO
vxψθϕ
,
′′
=
11
33OO
vx
.
Observing that
′′ ′
=+×
av v
11 1
OO O
ω , where
′
v
1
O
is the derivative with respect to the
movable frame of reference, using the results previously obtained for the vector and
taking into account that = constψ
, we get
′′ ′
=+
11 1
2
13 3
2 sin cos sin cos sin
OO O
ax xψθϕψ θθϕ
,
′′ ′
=− +
11 1
2
23 3
2 sin sin sin cos cos
OO O
ax xψθϕψ θθϕ
,
′′
=−
11 1
22
33 3
sin
OO O
ax xψθ
.
237
14 Dynamics of the Rigid Solid
ω
In the system of equations (14.1.75'), (14.1.76') we take the movable frame at the point
1
O (maintaining thus the notations in Fig. 14.5) and we introduce the results obtained
above; the third equation (14.1.75') and the third equation (14.1.76') form a system of
two second order differential equations with the unknowns
′′
=
11
33
()
OO
xxt
and
= ()tϕϕ . After integrating this system of equations, one obtains easily the other
unknowns of the problem. Obviously, in this case, as in the preceding one, certain
initial conditions of Cauchy type must be fulfilled too.
d Solid Subjected to Certain
Let us consider firstly the case of a rigid solid for which the point O is constrained to
stay on a given perfectly smooth curve C (in general, movable) of equation (14.1.72),
another point
1
O of which staying on a given perfectly smooth surface S (in general,
movable) of equation (14.1.70), where we replace the point O by the point
1
O ( = 3p ,
= 0m
). Using the axiom of liberation of constraints, the equations of motion of this
solid have the form
()
[]
1122
grad grad grad
OO
Mfffλλ λ
′′
+× +× +× = + + +
vv R
ωωρωρ ,
(14.1.79)
()()
()
1
grad
OOO OOOO
Mfλ
′′ ′′
×+×++× =+ −×
vvI IMrrρω ωωω .
(14.1.79')
To determine the vector unknowns
′
v
O
and and the scalar unknowns λ,
1
λ and
2
λ
( = 3q , 9 scalar unknowns) we have the vector equations (14.1.79), (14.1.79') and the
scalar equations (14.1.70), (14.1.72) (9 scalar equations).
Let be also the case of a rigid solid for which the points
i
O ,
= 1,2, 3, 4i
, are
constrained to move on a perfectly smooth surfaces (in general, movable)
i
S ,
= 1,2, 3, 4i
, respectively, of equations (
= 4p
, = 0m )
()( )
′′′′
==
r
123
;,,;0
iiii
ii
OOOO
ftfxxxt, = 1,2,3, 4i .
(14.1.80)
The rigid solid remains thus with two degrees of freedom. Proceeding as in the
preceding case, we can write the equations (14.1.60), (14.1.60') in the form
()
[]
=
′′
+× +× +× = +
∑
vv R
4
1
grad
ii
OO
i
Mfλ
ωωρωρ ,
(14.1.81)
()()
()
4
1
grad
i
ii
OOO OO OO
i
Mfλ
=
′′ ′′
×+×++× =+ −×
∑
vvI IM rr
ρω ωωω ,
(14.1.81')
14.1.2.4 Other Cases of Motion of the Rigi
Constraint Conditions
238
MECHANICAL SYSTEMS, CLASSICAL MODELS
ω
The vector equations (14.1.81), (14.1.81') and the scalar equations (14.1.80) (ten scalar
equations) determine thus the vector unknowns
′
v
O
and and the scalar unknowns
i
λ ,
= 1,2, 3, 4i ( = 4q ; ten scalar unknowns).
The general results previously obtained will be used, in what follows, to some
important cases of motion of the rigid solid; we study thus the motion of the rigid solid
about a fixed axis, as well as its plane-parallel motion.
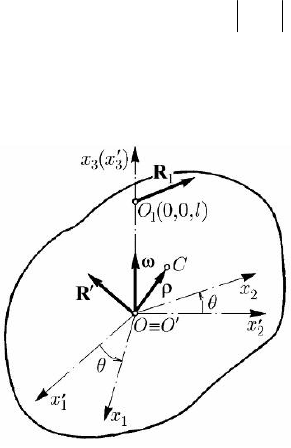
An important particular case of that presented in Sect. 1.2.3 is that one in which
the axis is a fixed one (the two points O and
1
O of the rigid solid are fixed). E.g., we
mention the rigid pendulum. We will consider thus the pendulums of Borda, Kater and
Bessel, the annular pendulum of Voinaroski, the inclined pendulum of Mach and the
Weber-Gauss pendulum of torsion.
Choosing the straight line
≡
1
OOΔ as
3
Ox -axis ( =
1
OO l
) and noting that this
axis is fixed, it is convenient to take
′
≡OO
and
′′
≡
33
Ox O x ; in this case
==
12
0ωω , while =
3
ωω, the angular velocity vector being situated along the
′′
3
Ox -axis (Fig. 14.6). All the points of the rigid solid describe circular trajectories in
Fig. 14.6 Motion of a rigid solid about a fixed axis
planes normal to the
′′
3
Ox -axis, the centres of which are on that axis (the fixed and the
movable axoids are degenerated, coinciding with the axis). The motion has only one
degree of freedom, to which corresponds the angle
= ()tθθ (classical notation for the
14.2. Motion of a Rigid Solid about a Fixed Axis. Plane-parallel
Motion of the Rigid Solid
14.2.1 Motion of the Rigid Solid about a Fixed Axis
14.2.1.1 General Results
239
14 Dynamics of the Rigid Solid
ω
ω

angle of proper rotation in this motion, different of that corresponding to Euler’s
angles); we have, obviously,
=ωθ
. Taking into account the conditions
′′
==
vv0
1
OO
, the relations (14.1.74''') are identically verified. If we put also
′
=
a0
O
,
then the equations of motion (14.1.75'), (14.1.76') take the form
()
′
−+=++
2
211111
MRRRωρ ω ρ
,
()
′
+=++
2
122212
M RRRωρ ω ρ
,
′
=++
3313
0 RRR,
(14.2.1)
−=−
2
31 23 12
1O
II MlRωω
,
+=+
2
23 31 11
2
O
II MlRωω
,
=
33
3
O
IMω
,
(14.2.1')
where
′
R and
R
1
are the constraint forces at the points
′
O
and
1
O
, respectively.
The third equation (14.2.1') can be written in the form
=
33
3
O
IMθ
(14.2.2)
too. If
()
=
33
,;
OO
MM tθθ
and if initial conditions of Cauchy type
()
=
00
tθθ,
() ()
===
0000
ttθωθω
(14.2.2')
are given too for the differential equation of second order (14.2.2), then we can
determine univocally the angle of proper rotation
= ()tθθ , using the theorem of
existence and uniqueness. If
=
3
0
O
M
, then the motion of rotation is uniform, and if
we have
=
0
0θ
(
()
=
0
3
,0; 0
O
Mtθ ) too, then the rigid solid is at rest with respect to
the fixed frame of reference. Observing that
2
33
1
2
TI
ω
′
=
and
()
′′
+=+⋅=
MM
3
dd d d
O
RO O
WW tMtωω ,
and applying the theorem of kinetic energy in the form (14.1.66), we find again the
equation of motion (14.2.2). We mention that the pseudomoment of momentum is given
by
=+ +Kii
33 31 1 23 2
O
II Iωωω ;
we have
=K
33
O
I ω, so that the pseudomoment of momentum is directed along the
fixed axis if and only if that axis is a principal axis of inertia.
240
MECHANICAL SYSTEMS, CLASSICAL MODELS
The first two equations (14.2.1') and then the first two equations (14.2.1) allow to
compute the constraint forces along the axes
1
Ox and
2
Ox ; we obtain
⎡
⎤⎡ ⎤
′
=−−+ −+
⎢
⎥⎢ ⎥
⎣
⎦⎣ ⎦
2
11223131
2
111
O
RMRM I M I
lll
ρωρω
,
⎡
⎤⎡ ⎤
′
=− − + + − +
⎢
⎥⎢ ⎥
⎣
⎦⎣ ⎦
2
22131223
1
111
O
RMRMI MI
lll
ρωρω
,
(14.2.3)
()
[]
=− − +
2
11 23 31
2
1
O
RMII
l
ωω
,
()
[]
=−−
2
12 31 23
1
1
O
RMII
l
ωω
.
(14.2.3')
The third equation (14.2.1) specifies only the sum
′
+=−
313 3
RR R of the other two
components of the constraint forces, the problem being thus indeterminate from this
point of view (as in the static case), due to the model of rigid solid adopted for the solid
body.
We notice that the constraint forces depend on the angular velocity and on the
angular acceleration
ω; for great values of these quantities (the square of the angular
velocity,
2
ω , or its non-uniformity given by
ω), e.g., for the rotation velocities of the
propellers and of the turbines, the constraint forces increase very much; the stress in the
axle increases also and it is possible to reach the state of fracture. As it was noticed by
L. Euler, this dependence disappears if
==
23 31
0II and ==
12
0ρρ , hence if the
axis of rotation is a central principal axis of inertia; it results
′
=−
11
2
1
O
RMR
l
,
′
=− −
22
1
1
O
RMR
l
,
(14.2.4)
=−
11
2
1
O
RM
l
, =
12
1
1
O
RM
l
,
(14.2.4')
corresponding to the formulae (4.2.7'') obtained in the static case (the dynamic
constraint forces coincide with the static ones). In this case, the constraint forces depend
only on the given external forces, which are equilibrating them from the statical point of
view, and are not influenced by the rotation of the rigid solid.
Putting the condition that the constraint force at the point
1
O be zero ( =R0
1
) for
any rotation of the rigid solid, we obtain
==
23 31
0II , ==
12
0
OO
MM ; we get
thus the constraint forces
()
′
=− − +
2
11 21
RRMρω ρω
,
()
′
=− + −
2
22 12
RRMρω ρω
,
′
=−
33
RR,
(14.2.5)
the problem becoming statically determinate. Hence, for any rotation of the rigid solid,
it is sufficient only one point of support of the axis of rotation (the fixed point O) if and
only if that one is a principal axis of inertia, the given external forces having a resultant
moment with respect to the point of support, which is directed along this axis. Such an
axis is obtained, e.g., in the case in which the rigid solid is acted upon by a unique
241
14 Dynamics of the Rigid Solid
ω
given force, situated in a plane normal to a principal axis of inertia, non-intersecting
this axis, the trace of which on the plane being a fixed point. We obtain an analogous
result if the support of the given force passes through a fixed point, the axis of rotation
(which is a principal axis of inertia) passing through the same point; in this case, we
have
=
3
0
O
M , hence =M0
O
too, being led to a motion of uniform rotation
(corresponding to the equation (14.2.2)), so that
′
=− −
2
111
RRMρω ,
′
=− −
2
222
RRMρω ,
′
=−
33
RR.
(14.2.5')
We can state
Theorem 14.2.1 If a rigid solid with a fixed point is subjected to the action of a system
of given forces equivalent to a resultant the support of which passes through this point
and if this solid has an initial uniform motion of rotation about a principal axis of
inertia which passes, as well, through the very same fixed point, then the rigid solid
continuous to have this motion indefinitely.
In this case, the axis of rotation is called permanent axis of rotation; sometimes, this
denomination (justified by the Theorem 14.1.21) is used also in the more general case
≠
3
0
O
M .
The supplementary condition which imposes the vanishing of the constraint force at
the point O too (
′
=
R0), for any rotation of the rigid solid, leads to ==
12
0ρρ ,
===
123
0RRR . If and only if the axis of rotation is a central principal axis of
inertia, the rigid solid being acted upon only by a couple contained in a plane normal
to this axis, then no point of support is necessary for that axis; in this case, the axis of
rotation is a free axis of rotation, and the fixed axle is not acted by a given force. If
=
3
0
O
M , hence if =M0
O
too, then we can state
Theorem 14.2.2 If a free rigid solid is not acted upon by any given force and has a
uniform motion of rotation about a central principal axis of inertia, then it will continue
to have this motion indefinitely, the axis remaining fixed.
In this case, the free axis of rotation is called spontaneous axis of rotation;
sometimes, this denomination (justified by the Theorem 14.2.2) is used also in the more
general case in which
≠
3
0
O
M . This result can be verified experimentally in a space
laboratory, in conditions of imponderability. The Theorem 14.2.2 can be considered as
a completion for the rigid solid of Newton’s “principle of inertia”, enounced for a
particle (eventually for the mass centre of the rigid solid).
We call physical (rigid, compound) pendulum a rigid solid which is rotating about a
horizontal fixed axis, being subjected only to the action of its own weight. We take the
′′′
23
Ox x -plane as horizontal plane, the fixed axis as
′′
3
Ox -axis, the
′′
1
Ox -axis being
along the descendent vertical. Without any loss of generality, the
1
Ox -axis will be
taken so as to pass through the centre of mass C, at which acts the own weight
G; the
position of the rigid solid will be thus specified by the angle of proper rotation
14.2.1.2 Physical Pendulum. Huygens’s Theorems
242
MECHANICAL SYSTEMS, CLASSICAL MODELS