Teodorescu P.P. Mechanical Systems, Classical Models Volume II: Mechanics of Discrete and Continuous Systems
Подождите немного. Документ загружается.

so that
2
2
2
2
MR
TMR
ππ
νν
==
(14.2.24)
for isochronous oscillations.
If the rigid solid
S is a circular cylinder of radius R and mass M , then we have
=
2
33
/2IMR. We can verify the mathematical model considered for the torsion of
threads adding to the rigid solid two equal homogeneous spheres, each of radius r and
mass m, connected by a thin rod of length 2l and negligible mass with respect to m
(Fig. 14.13,b). Denoting by
′
33
I the axial moment of inertia of the new obtained
mechanical system and using the Huygens-Steiner theorem (formula (3.1.113)), we
obtain
2
22
33
22 4
2
25
MR
T I ml mr
ππ
νν
′′
== ++
.
(14.2.24')
Assuming that the periods T and
T
′
are obtained experimentally, one determines the
constant
ν of torsion of the thread. Practically, the values thus obtained differ very little;
if the difference is not great, then one can assume that the determination is sufficiently
good. Eliminating
ν between the relations (14.2.24) and (14.2.24'), one obtains the
moment of inertia
33
I
by experimental determinations; this result can be of interest for
any rigid solid of revolution
S.
The plane-parallel motion of the rigid solid is a particular case of motion which is
frequently encountered in practice. In this order of ideas, after some applications, we
make considerations concerning the dynamics of the three-dimensional motion of an
airplane and then the plane-parallel motion of it. As well, we present the motion with
sliding and rolling friction on an inclined or on a horizontal plane.
As we have seen in Chap. 5, Subsec. 2.3.4, a rigid solid
S has a plane-parallel
motion if three non-collinear points of it are contained during the motion in a fixed
plane, hence if a plane section (the
12
Ox x
-plane or the
12
Ox x
-plane) of the rigid solid
slides on a fixed plane (the
′′′
12
Oxx -plane); the axes
3
Ox
′′
and
3
Ox
(or
3
Ox
) are
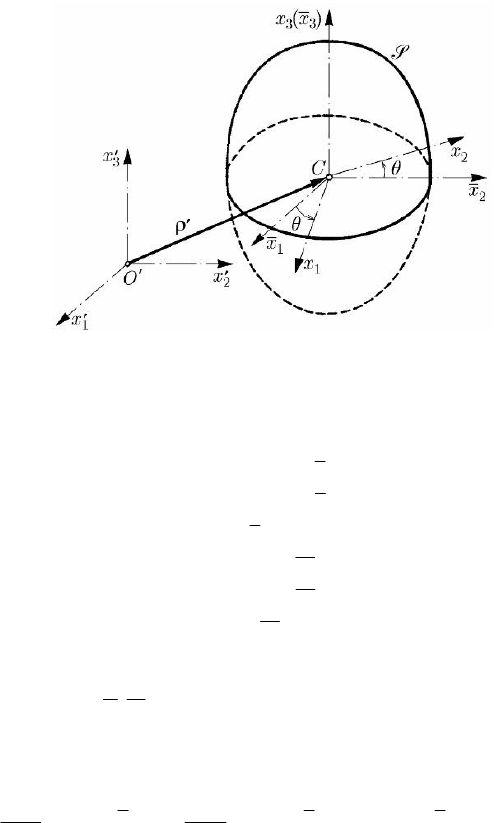
normal to these planes. Without particularizing the motion, we can take the mass centre
as pole of the non-inertial frame of reference (
OC≡
) (Fig. 14.14). In this case, the
14.2.2 Plane-parallel Motion of the Rigid Solid
14.2.2.1 General results
253
14 Dynamics of the Rigid Solid
rigid solid
S has only three degrees of freedom and we can choose as parameters
which specify the motion the co-ordinates
1
ρ
′
and
2
ρ
′
(
3
0ρ
′
=
) of the mass centre C
and the angle
θ made by the axis
1
Cx with the axis
1
Cx . The fixed and the movable
axoids are two cylinders the traces of which on the fixed plane are the fixed and
movable centrods, respectively, tangent one to the other at the instantaneous centre of
rotation (see Chap. 5, Sect. 2.3.4).
Starting from the equations (14.1.48), (14.1.52), we can write the equations of
motion along the axes of the frame of reference
R in the form
()
11
12CC
Mv v R Rω
′′
−=+
,
()
22
12
CC
Mv v R Rω
′′
+=+
,
33
0 RR=+,
(14.2.25)
2
1
31 23
1
C
C
II MMωω−=+
,
2
2
23 31
2
C
C
II MMωω+=+
,
3
33
3
C
C
IMMω =+
,
(14.2.25')
where we noticed that
3
0
C
v
′
= , while
3
ω= iω
; here
{
}
,
C
RM is the torsor of the
given forces, while
{
}
,
C
RM
is the torsor of the constraint forces. Projecting the
equation (14.1.47) on the axes of the inertial frame of reference
′
R , we obtain the
scalar equations (which replace the equations (14.2.25))
2
1
11
2
d
d
MRR
t
ρ
′
=+
,
2
2
22
2
d
d
MRR
t
ρ
′
=+
,
33
0 RR=+,
(14.2.26)
where the notations correspond to these co-ordinate axes.
Fig. 14.14 Plane-parallel motion of the rigid solid
254
MECHANICAL SYSTEMS, CLASSICAL MODELS
To have a plane-parallel motion of the rigid solid, it is sufficient that three non-
collinear points of it (e.g., the points C,
()
11
,0,0Ph and
()
22
0, ,0Ph ,
12
,0hh> ) be
during the motion in the fixed plane; assuming that the motion of these points is

frictionless, the corresponding constraint forces are of the form
3
3CC
R=Ri
,
1133
R=Ri,
2233
R=Ri, which leads to
12
0RR==
,
31323
3C
RR R R=++
,
1
223
C
MhR= ,
2
113
C
MhR=− ,
3
0
C
M = . Associating adequate initial conditions of
Cauchy type, we notice that the third equation (14.2.25') determines the angular
velocity
()t=ωω; then the first two equations (14.2.25) give the components
()
Cj Cj
vvt
′′
= , 1, 2j = , of the velocity of the mass centre C with respect to the inertial
frame of reference. In this case too, we can adopt correspondingly the theorem of
existence and uniqueness. The first two equations (14.2.25') allow to calculate the
components
23
R and
13
R of the constraint forces, while the third equation (14.2.25)
specifies the constraint force
3C
R . Thus, the plane-parallel motion of the rigid solid is
statically determinate; in the case in which the number of the points of the solid which
coincide all the time with the fixed plane is greater than three, then the problem
becomes statically indeterminate (due to the model of rigid solid adopted). If the motion
of the rigid solid is a plane-parallel one, the constraint forces vanishing, one must have
=
3
0R ; hence, the resultant of the given forces must be parallel to the fixed plane. The
moment of the given forces is directed along the normal to the fixed plane
(
12
0
CC
MM==) if and only if the
3
Cx -axis is a central principal axis of inertia,
hence if
23 31
0II==
. In this case, the pseudomoment of momentum
C
K has the
components
1
const
C
K =
,
2
const
C
K =
; because at the initial moment we have
12
0
CC
KK==, it results that during the motion we have
33
CC
K=Ki.
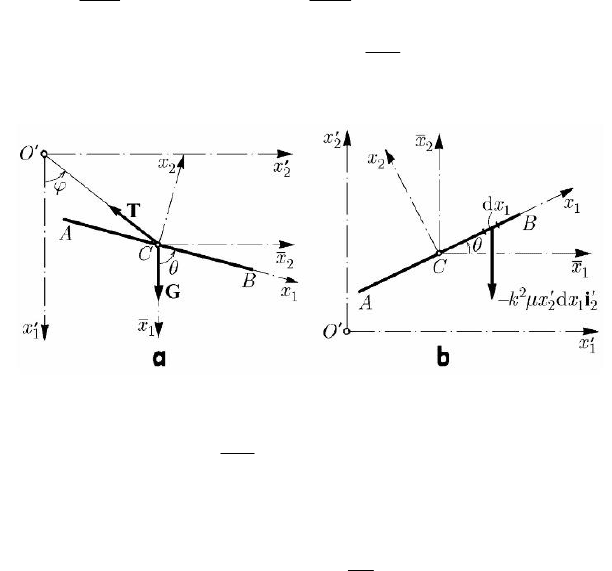
Le be a rigid straight bar AB of length 2l, which is moving in the fixed plane
′′′
12
Oxx (in a modelling of unidimensional solid). Assuming that the bar is
homogeneous, of linear density
μ, the mass centre will be at its middle; in the same
fixed plane, we consider also the non-inertial frames of reference
12
Cx x (the axes of
which are parallel to the axes of the inertial frame
′′′
12
Oxx ) and
12
Cx x
, the axis
1
Cx
being along the bar. The position of the bar will be specified by the co-ordinates
1
ρ
′
and
2
ρ
′
of the centre of mass and by the angle θ, made by the
1
Cx -axis with the
1
Cx -axis.
Because of the symmetry, the
1
Cx
-axis is a central principal axis of inertia, any normal
axis at C to that one having the same property; thus, we have
23 31
0II==. On the
other hand,
2
33 1 1
d
l
l
Ixxμ
−
=
∫
, so that
32
33
2/3 /3IlMlμ==, where = 2Mlμ is
the mass of the bar.
We assume that the bar is in a vertical plane and is subjected to the action of its own
weight
M=Gg; its centre of mass C is connected to the fixed point
′
O
by an
14.2.2.2 The Plane-Parallel Motion of a Rigid Straight Bar
255
14 Dynamics of the Rigid Solid
inextensible thread (in which arises the tension T ) (Fig. 14.15a). It results
C
=M0 so
that
= 0ω
, wherefrom
00
tθω θ=+
,
0
θ
and
0
ω corresponding to the position and to
the angular velocity at the initial moment
= 0t
, respectively. The equations of motion
of the mass centre in the non-parallel frame of reference
R have the form
()
()
0
12
cos cos
CC
Mv v Mg Tωθθϕ
′′
−= −−
,
()
()
0
21
sin sin
CC
Mv v Mg Tωθθϕ
′′
+=−−−
,
(14.2.27)
but it is difficult to study them directly; it is more convenient to use the equations
(14.2.26), which lead to
2
1
2
d
cos
d
MMgT
t
ρ
ϕ
′
=−
,
2
2
2
d
sin
d
MT
t
ρ
ϕ
′
=−
.
(14.2.27')
Observing that
1
coshρϕ
′
=
,
2
sinhρϕ
′
=
,
hOC
′
=
and eliminating the tension T,
we obtain the equation of the mathematical pendulum
2
2
d
sin 0
d
hg
t
ϕ
ϕ+=
,
the tension being given by
()
2
d
cos
d
TMg h
t
ϕ
ϕ
⎡
⎤
=+
⎢
⎥
⎣
⎦
.
Hence, the centre of mass C oscillates as a simple pendulum about the fixed point
O
′
,
the bar AB rotating uniformly around it in the considered vertical plane.
Let us suppose now that the straight bar slides frictionless on a horizontal fixed plane
′′′
12
Oxx , being attracted by the fixed axis
′′
1
Ox in direct proportion to the mass and to
the distance of each point of it to this axis (Fig. 14.15b). In this case (we use the
formula (3.1.9') of static moments)
Fig. 14.15 Plane-parallel motion of a rigid straight bar
256
MECHANICAL SYSTEMS, CLASSICAL MODELS
1
0R =
,
22
2212
d
l
l
RkxxkMμρ
−
′′
=− =−
∫
,
constk =
,
the equations of motion (14.2.26) leading to
1
at bρ
′
=+
,
()
2
sinAktρα
′
=+
;
eliminating the time t, we obtain
()
22
sin
k
Ab
a
ρρα
⎡
⎤
′′
=−+
⎢
⎥
⎣
⎦
,
(14.2.28)
the trajectory of the mass centre C being a sinusoid in the fixed plane. As well (the
static moment with respect to an axis which passes through C vanishes)
()
12
22 2
2
12 1 1 2 1
3
dd
ll
xx
C
ll
MkxxxkxxxkIμμρ
−−
′′
=− =− + =−
∫∫
222
11 33
sin cos d sin cos
l
l
kxxkIμθθ θθ
−
=− =−
∫
.
The angle
()tθθ= verifies the equation
2
sin cos 0kθθθ+=
.
(14.2.29)
We find thus again the equation of the mathematical pendulum for the argument 2
θ; the
oscillations defined by the equation (14.2.29) have been denoted by W. Thomson and
P.G. Tait, in 1861, quadrantal oscillations. Multiplying by
2θ
and integrating, we get
222
0
sinkθω θ=−
,
(14.2.29')
where
0
ω is the angular velocity for = 0 ; if
kω <
, then the bar oscillates about the
axis
1
Cx
, while if
kω >
, then the bar has a circular motion (it rotates in the same
sense). If
= kω
, we obtain
cosωθθ=
,
()
1
ln tan
24
t
θπ
ω
=+,
(14.2.30)
where
= 0θ for = 0t ; in this case, the bar tends to the
2
Cx -axis in an infinite time
(
t →∞ for /2θπ→ ).
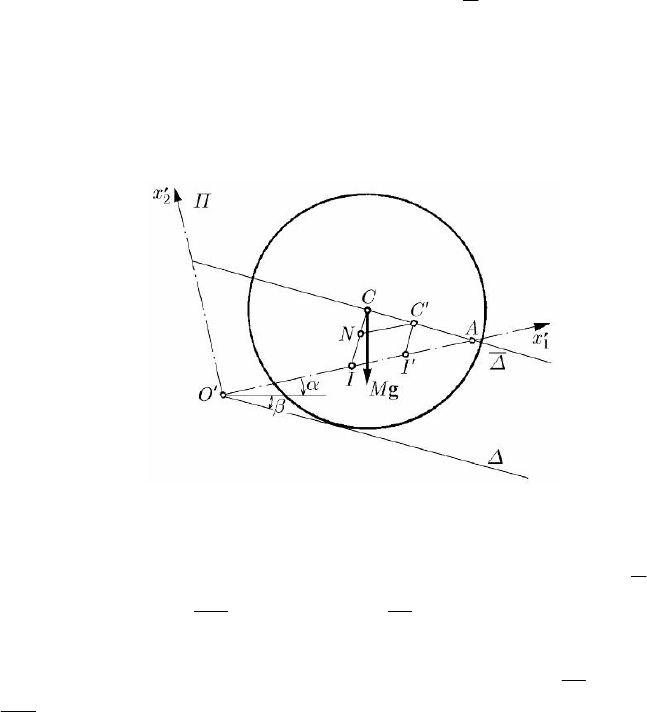
Let be an inclined plane formed by two axes
Δ
′
and Δ
′′
, concurrent at O
′
, equally
inclined on a horizontal plane and situated over it, and let be
′′
1
Ox the bisectrix of the
angle formed by these axes. We put on them a rigid double cone, formed by two equal
homogeneous circular cones, the bases of which are joined, so that their common plane
coincides with the vertical plane
Π and passes through the bisectrix
′′
1
Ox , which makes
Sphere on an Inclined Plane
14.2.2.3 The Plane-Parallel Motion of a Rigid Double Circular Cone and of a Rigid
257
14 Dynamics of the Rigid Solid
θ
the angle
α with the horizontal. We assume that this solid is placed, in the initial
position, at the lowest part of the angle formed by the axes
Δ
′
and Δ
′′
, in the
proximity of the point
O
′
; then, it is left to a free rolling, without sliding, on these axes,
under the action of its own weight M
g. In the fixed plane Π we specify the inertial
frame of reference
′′′
12
Oxx . The axes Δ
′
and Δ
′′
are projected on the plane Π along
the
′′
1
Ox -axis, while the points at which the double cone lays on them are projected at
the point I; as well, the vertices of the cones are projected at the point C, the centre of
mass of the double cone, the whole mechanical system being symmetric with respect to
the plane
Π. The planes which pass through the axes Δ
′
and Δ
′′
, respectively, and are
tangent to the two cones, make constant angles with the horizontal plane, being thus
fixed. Let
Δ be their intersection straight line, which is fixed too and is contained in the
plane
Π, making an angle β with the horizontal. The base circle of the two cones is
tangent to the axis
Δ, while its centre describes the axis Δ , parallel to the axis Δ. We
assume that the axis
Δ is situated below the horizontal, at the initial moment the mass
centre lying over the
′′
1
Ox -axis (Fig. 14.16). This plane-parallel motion, in which the
rigid solid, without initial velocity, seems to ascend on the inclined plane (its centre of
mass moves downwards), has been studied in the XIXth century by Résal, Fleury,
Mannheim and Saint-Germain.
In the plane of symmetry
Π, the point I is the instantaneous centre of rotation and
lies on the
′′
1
Ox -axis; hence, the straight line IC is normal to the trajectory Δ of the
point C and we have
ddCC s r θ
′
== , rIC= and d/d d d
C
v str trθ
′
==θ/=
,
where
=θω
is the angular velocity, while θ is the angle by which the double cone is
rotating, starting from an initial position. At the moment
dtt+ , =IC r becomes
Fig. 14.16 Plane-parallel motion of a rigid double cone
258
MECHANICAL SYSTEMS, CLASSICAL MODELS
dIC r r
′′
=− , ||IC IC
′′
, while the parallel through C
′
to
′′
1
Ox pierces IC at N ;
we have
()
dtanCN r CC αβ
′
=− = + +
,
hence
()
1
ddcot drrρθ αβ==− + . (14.2.31)
The theorem of kinetic energy is written in the form
()
22 2 2
11
dsincotd
22
C
Mr Mi Mg rθθ βαβ
⎡⎤
+=− +
⎢⎥
⎣⎦
,
where we have used the theorem of Koenig,
C
i being the gyration radius with respect
to the symmetry axis of the double cone, which is a central principal axis of inertia
(
2
CC
IMi= ); the elementary work is given by dM ⋅g ρ . By integration,
()
()
()
2222 2
0
cot
C
ir krrθαβ+=− +
,
()
2
2sin tankgβαβ=+,
(14.2.32)
where
0
r corresponds to the initial moment
0t =
, for which we have 0θ =
too.
Taking into account (14.2.31) and integrating, the time will be given by the elliptic
integral
0
22
0
11
d
r
C
r
ir
tr
krrr
+
=−
−
∫
,
(14.2.32')
where we have taken the sign minus because it is obvious, from a geometrical point of
view, that r diminishes starting from
0
r . For 0r → it results t →∞, hence the mass
centre C tends to the limit position
1
AOx Δ
′′
≡∩
, without reaching it (or in an
infinite time). Starting from (14.2.31) we can also write
()
tan
0
err
θαβ−+
=
,
()
()
00
cotss r r αβ−= − +,
(14.2.33)
where we have assumed that
0θ = for
0
rr= , while s is the abscissa along the
Δ
-
axis. Thus, the relation (14.2.32) may lead to
11
()tρρ= , obtaining the law of motion
of the mass centre along the
Δ -axis; the same relation shows that its velocity is given
by
()
0
22
cot
C
C
rr
vkr
ir
αβ
−
′
=+
+
.
(14.2.32'')
259
14 Dynamics of the Rigid Solid
This velocity vanishes at the initial position
0
rr= and at the final position 0r = ; it
has a maximum in the interval of time in which the motion takes place. From a
kinematical point of view, the motion of the base circle of the cones is obtained rolling
the logarithmic spiral given by the first equation (14.2.33) on the
1
Ox
′′
-axis.
Mannheim considers in 1859 a similar problem for a homogeneous sphere of radius
R which, as well, seems to ascend on the inclined plane in the same conditions (the
centre of mass moves downwards). We keep the previous notations. If we denote by N
the point at which the axis
Δ
′
, e.g., is tangent to the sphere, we have
22
222
12
OC R ON ρρ
′′′′
=+ =+
, where we have specified the mass centre C (the
centre of the sphere) with respect to the non-inertial frame of reference
12
Oxx
′′′
;
observing that
1
cosON ρϕ
′′
=
, where 2ϕ is the angle formed by the axes Δ
′
and Δ
′′
,
it results
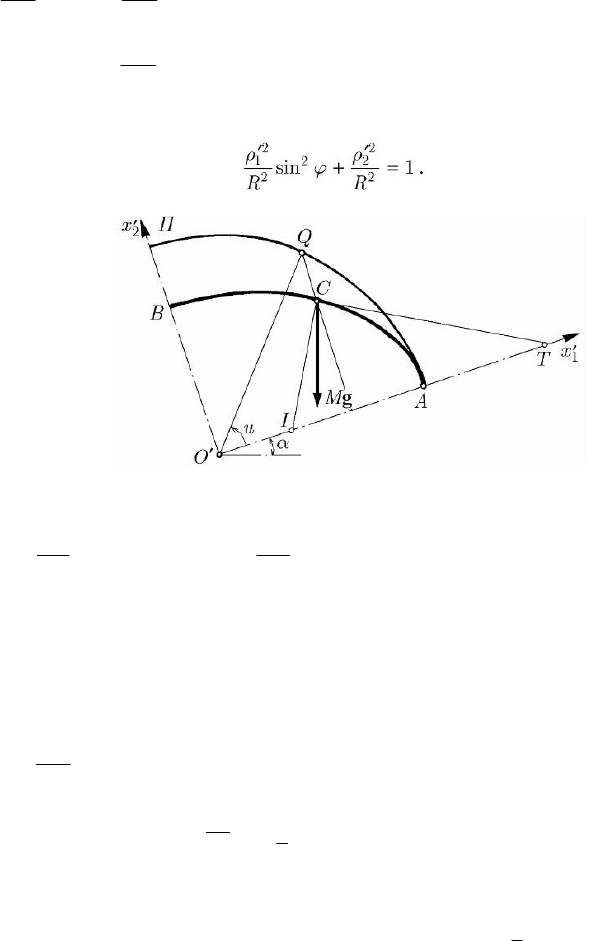
Hence, the centre of mass C describes an arc of ellipse of semiaxes
/sinaOAR ϕ
′
==
and bOB R
′
== (Fig. 14.17); the normal at C to the ellipse
pierces the
1
Ox
′′
-axis at the instantaneous centre of rotation I in the vertical plane Π.
The normal from C to
1
Ox
′′
pierces the circle of radius a and centre O
′
at Q;
introducing the eccentric anomaly u (see Chap. 9, Sect. 2.1.3, Fig. 9.8 too), the
parametric equations of the ellipse are
1
cosauρ
′
=
,
2
sinbuρ
′
=
. The tangent at C to
the ellipse (the equation of which is obtained by halving) pierces the
1
Ox
′′
-axis at T so
that
2
1
/OT a ρ
′′
=
; in the right triangle ICT we get
()
()
2
2
22222
sin cos
b
rIC a ub u
a
== + .
Fig. 14.17 Plane-parallel motion of a rigid sphere
260
MECHANICAL SYSTEMS, CLASSICAL MODELS
We can thus write
()
(
)
2
22222222 22
12
dd d sin cosd d
a
saubuuru
b
ρρ
′′
=+= + =
for the element of arc of ellipse. But
ddsrθ= , so that
()
d/dab uθ = ; the velocity of
the mass centre will be
()
/
C
vrrabuθ
′
==
. Applying the theorem of kinetic energy,
as in the preceding case, we get the equation
(
)
2
222 22
sin cos
C
a
ia ub uu
b
⎡⎤
++
⎢⎥
⎣⎦
()()
[]
00
2 sin cos cos cos sin singa u u b u uαα=−+−
,
(14.2.34)
which allows to compute the time t as function of the anomaly u by a quadrature. From
a kinematical point of view, the motion of the sphere is obtained by rolling an
epicycloid on the
1
Ox
′′
-axis.
We present firstly the general equations of motion of the airplane; this one will be
modelled as a free rigid mechanical system with a plane of symmetry, subjected to the
action of given forces: own weight (dead and useful load), forces of aerodynamical
resistance and driving forces. The inertial frame of reference
′
R
, called geodesic
frame, has the origin
O
′
at the initial position of the mass centre C; the
1
Ox
′′
-axis is
taken along the direction of the initial velocity of the centre C and the
3
Ox
′′
-axis along
the descendent vertical. The non-inertial frame
R will be rigidly linked to the airplane,
having the pole at C; the
1
Ox -axis is along the longitudinal axis of the airplane, its
sense coinciding with the sense of advance, while the
3
Ox
-axis is contained in the
symmetry plane.
14.2.2.4 Dynamics of Motion of the Airplane
261
14 Dynamics of the Rigid Solid
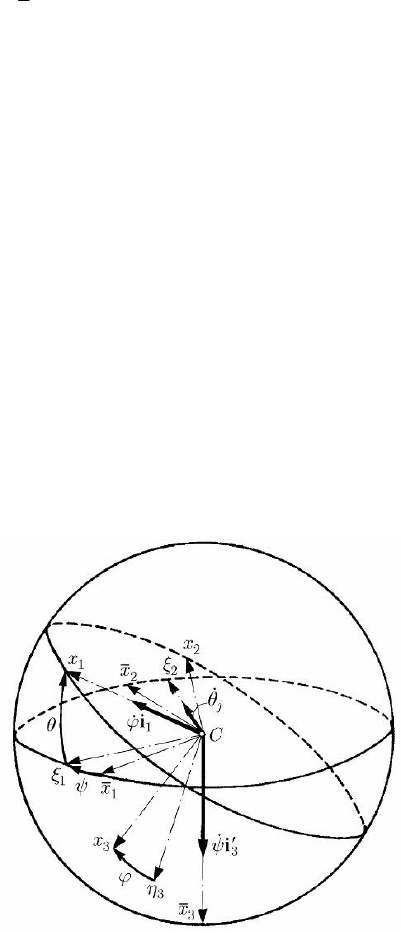
Fig. 14.18 Dynamics of the motion of an airplane
To pass from the initial position of the airplane to its actual position, hence from the
frame
′
R to the frame R, one performs a translation, which brings the pole O
′
at the
pole C so as to coincide with the frame
R (the axes of which are parallel to those of
the frame
′
R ) and a rotation, composed of three successive rotations (Fig. 14.18); i) a
rotation of angle
ψ (angle of gyration, which puts in evidence the rotation with
respect to the initial direction), about the
3
Cx -axis, which carries the
1
Cx -axis in the
vertical plane which contains
3
Cx (let be
123
Cxξξ the frame in this position); ii) a
rotation of angle
θ (angle of pitching, which is the angle of inclination of the
longitudinal axis of the airplane), about the
2
Cξ -axis, which carries the
1
Cξ -axis in the
position
1
Cx (let
12 3
Cx ξη be the corresponding position of the frame); iii) a rotation
of angle
ϕ (the angle of rolling, which indicates the inclination on a wing), about the
axis
1
Cx , which carries
2
C ξ in the position
2
Cx and
3
C η in
3
Cx . These three
rotations are, in fact, specified by angles of Eulerian type (
ψ, θ and ϕ), adapted to the
problem of motion of the airplane. As in Chap. 3, Subsec. 2.2.3, we introduce the
column matrices (3.2.11), the unit vectors
j
i ,
1, 2, 3
j
=
, of the frame R being
expressed with respect to the unit vectors
k
′
i , 1,2, 3k = , of the frame
′
R
by means
of the matric product (3.2.11''). Noting that
cos sin 0
sin cos 0
001
ψψ
ψψ
⎡⎤
⎢⎥
=−
⎢⎥
⎢⎥
⎢⎥
⎣⎦
Ψ
,
cos 0 sin
01 0
sin 0 cos
θθ
θθ
⎡
⎤
−
⎢
⎥
=
⎢
⎥
⎢
⎥
⎢
⎥
⎣
⎦
Θ
,
10 0
0cos sin
0sincos
ϕϕ
ϕϕ
⎡
⎤
⎢
⎥
=
⎢
⎥
⎢
⎥
−
⎢
⎥
⎣
⎦
Φ
,
(14.2.35)
262
MECHANICAL SYSTEMS, CLASSICAL MODELS
Ψ
Θ
we introduce the matrix of components
j
j
kk
β
′
=⋅ii
, ,1,2,3jk= , which specifies
the direction cosines of the axes of the frame
R with respect to the axes of the frame
R in the form
cos cos sin cos sin
sin cos cos sin sin cos cos sin sin sin cos sin
sin sin cos sin cos cos sin sin sin cos cos cos
ψθ ψθ θ
ψϕ ψθϕ ψϕ ψθϕ θϕ
ψϕ ψθϕ ψϕ ψθϕ θϕ
⎡⎤
−
⎢⎥
=− + +
⎢⎥
⎢⎥
+−+
⎢⎥
⎣⎦
β
.
(14.2.35')
Observing that
31
ψθϕ
′
=++
i
j
iω
,
2
versC ξ=
j
, we obtain the components of the
rotation angular velocity vector in the frame
R in the form
1
sinωϕψθ=−
,
2
cos sin cosωψθϕθϕ=+
,
3
cos cos sinωψθϕθϕ=−
,
(14.2.36)
β