Teodorescu P.P. Mechanical Systems, Classical Models Volume I: Particle Mechanics
Подождите немного. Документ загружается.

Problems of dynamics of the particle
421
a confirmation that the trajectory is rectilinear. Choosing this trajectory as
Ox -axis, we
obtain
(
)
00
vfgttv=− − + ,
()()
2
0000
2
f
g
xttvttx
=
−−+−+,
0
00
v
tttt
f
g
∗
≤≤ = +
,
(7.1.35'')
where the time
t
∗
is given by the condition
(
)
0vt
∗
=
; timing the time t
∗
, one may
obtain – experimentally – the coefficient of sliding friction
f
. After a time
0
tt
∗
− , the
particle travels through the distance
2
0
/2lv fg= ; inversely, measuring
l
one
determines the initial velocity
0
2vfgl= .
(7.1.35''')
We may thus estimate the velocity of a car if we know the braking distance
l .
If the initial velocity vanishes (
0
0v
=
), then it results 3/2θπ
=
, so that the
sliding of the particle on the inclined plane takes place along the line of greatest slope,
the trajectory being rectilinear; using the above equations, the acceleration at a given
moment is specified by (along the
2
Ox -axis)
2
sin( )
cos
ag
αϕ
ϕ
−
=−
.
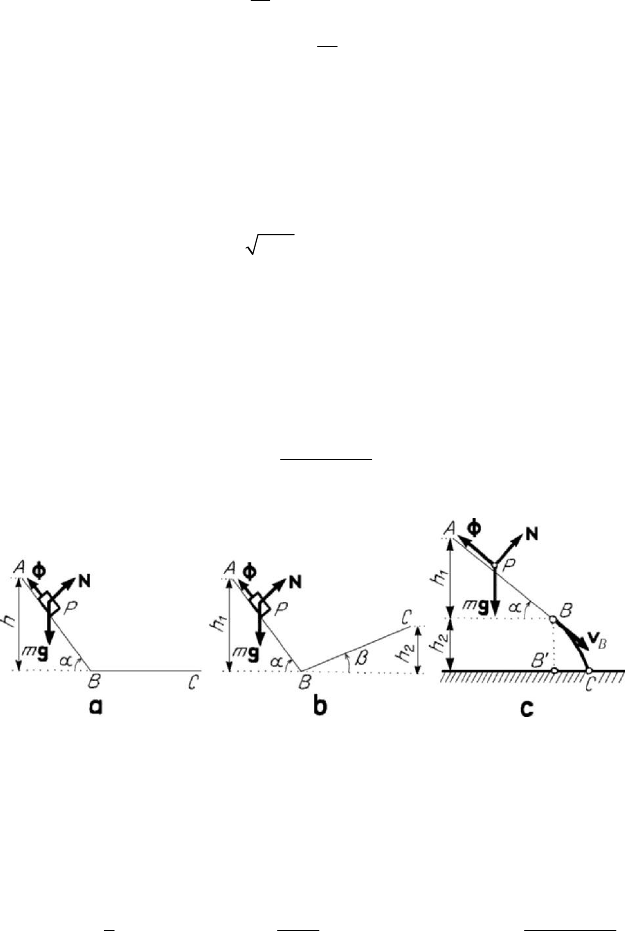
Figure 7.7. Motion of a heavy particle constrained to sliding friction on an inclined plane:
motion continues on a horizontal plane (a); motion continues on
an inclined plane (b); silo’s problem (c).
Applying the theorem of kinetic energy in a finite form (6.1.48''), we obtain the velocity
at the point
B , assuming that the body, modelled as a particle, departs from A without
initial velocity (Fig.7.7,a); noting that
0
A
T = ,
2
1
2
BB
Tmv= ,
sin( )
(sin cos )
sin sin cos
AB
h
Wmg f mgh
αϕ
αα
ααϕ
−
=−=
,
it follows
MECHANICAL SYSTEMS, CLASSICAL MODELS
422
sin( )
2
sin cos
B
vgh
αϕ
αϕ
−
=
.
(7.1.36)
In the absence of frictions,
2
B
vgh=
, as in the case of a free falling along the
vertical (Torricelli’s formula). Applying further the theorem of kinetic energy, we see
that the body moves on the horizontal line till the point
C , so that (Fig.7.7,a)
sin( )
sin sin
BC h
αϕ
αϕ
−
=
;
(7.1.36')
in the case of vanishing friction,
C tends to infinity. If the plane BC makes the angle
β
with the horizontal line, the body moves till the height
2
h , given by (Fig.7.7,b)
21 1
sin sin( )
sin sin( )
hh h
βαϕ
αβϕ
−
=<
+
;
(7.1.36'')
in the case in which the friction is vanishing, we have
21
hh
=
. This is the problem of
the sledge. If, from the point
B , the particle is falling freely till the point C (the
problem of the silo, Fig.7.7,c), then the motion takes place along a parabola, so that
2
2
22
1
tan
2
cos
B
g
hBCBC
v
α
α
′′
=+
.
(7.1.36''')
1.3 Pendulary motion
As we have seen in Subsec. 1.2.4, a heavy particle constrained to stay on a fixed
curve has an oscillatory motion; such a motion is called also a pendulary motion. In
what follows, we consider the case of a curve in a vertical plane, in particular the case
in which the curve is a circle, an ellipse or a cycloid; we study then the general case of
motion, as well as the case of small displacements in the neighbourhood of a stable
position of equilibrium. Starting from the motion of a heavy particle on a surface of
rotation, we present the general problem of the spherical pendulum too.
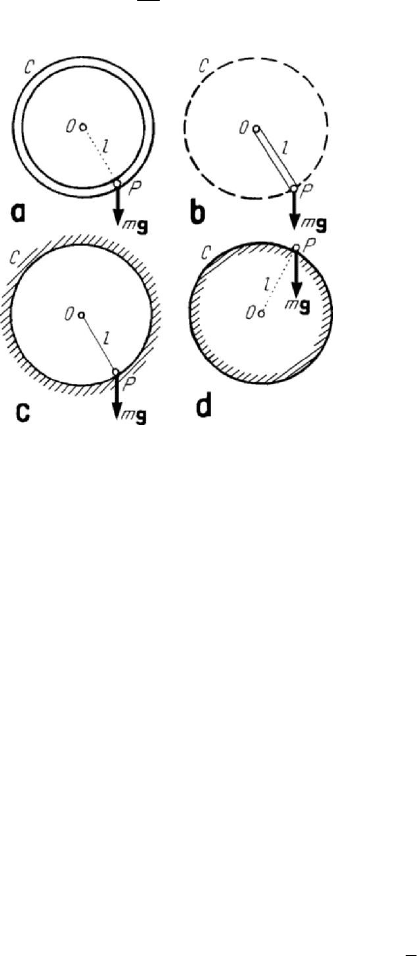
1.3.1 Simple pendulum
A simple pendulum (or mathematical pendulum) is a heavy particle which moves
without friction on a circle
C of radius l , situated in a vertical plane. The constraint
may be bilateral (e.g., a ball modelled as a particle constrained to move in the interior of
a circular tube (Fig.7.8,a) or a ball linked to the centre
O of the circle by an
inextensible and incompressible bar
OP , of negligible mass with respect to that of the
particle (Fig.7.8,b)) or unilateral (e.g., a ball linked to the centre
O by an inextensible
and perfectly flexible thread (Fig.7.8,c) or a ball constrained to move on a whole
cylinder, which has a horizontal axis (Fig.7.8,d)).
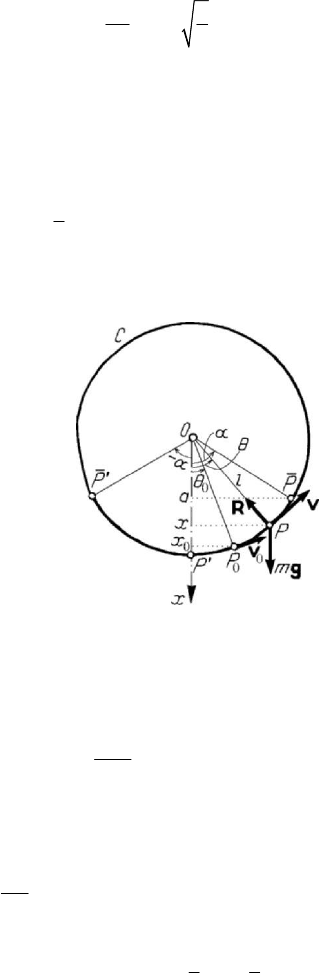
If we choose the
Ox -axis in the same direction as that of the gravity acceleration g
(Fig.7.9), then the theorem of kinetic energy in finite form, applied between the points
0
P and P , allows to write
Problems of dynamics of the particle
423
22 2
00 0 0
2( ) 2 (cos cos) 2( )vv gxxv gl gaxθθ=− −=− − =− −,
2
0
0
2
v
ax
g
=−,
(7.1.37)
Figure 7.8. Motion of a heavy particle constrained to stay on a circle in a vertical plane: bilateral
constraint (a,b); unilateral constraint (c,d).
where
00
vlθ=
is the modulus of the initial velocity (for the sake of simplicity, we will
say the initial velocity) at the point
0
P
(corresponding to the results in Subsec. 1.2.4).
The equation
xa= is that of a straight line which may be reached by a particle
launched up, along the local vertical, with the initial velocity
0
v ; the motion is
characterized by the constant
a in the case of a bilateral constraint. Indeed, if the
straight line
xa= pierces the circle
C
(
lal
−
<<
), then the motion is oscillatory, if
this line is tangent to the circle (
al
=
−
), then the motion is asymptotic, while if the
line does not pierce the circle (
al
<
−
), then the motion is circular. We notice that for
al=
we have
0
0v =
, corresponding a stable position of equilibrium; we cannot have
al> . From (7.1.37) it results that the velocity
vlθ
=
may vanish for an angle given
by
2
00
cos cos / 2vglθθ=− or by
()
222
00
sin ( / 2) sin /2 / 4vglθθ=+. This
condition can never be satisfied if
2
0
4vgl> (or
22
0
4θω>
,
2
/glω = ), the motion
being circular. If
2
0
4vgl< , then the condition may be fulfilled for some values of the
angle
0
θ , hence for some initial positions, e.g., for
0
0θ
=
; in this case, the motion is
oscillatory. If
2
0
4vgl= , then we must have
0
0θ
=
, the motion being asymptotic.
First of all, let us suppose that the motion is oscillatory; we denote
cosal α=
,
where
0 απ
<
< is the angle corresponding to the limit position
P
(for which
0v = ) of the particle P , specifying thus the amplitude of the motion. The relation
(7.1.37) becomes
MECHANICAL SYSTEMS, CLASSICAL MODELS
424
22
2(cos cos)θωθ α=−
;
(7.1.38)
differentiating with respect to time, we may also write (we suppose
0θ
≠
)
2
sin 0θω θ
+
=
.
(7.1.38')
This equation (called the equation of the mathematical pendulum) is often encountered
in problems of mechanics in one of the two equivalent forms mentioned above; in fact,
the relation (7.1.38) corresponds to a first integral of the equation of motion (7.1.38').
The particle departs from the initial position
0
P with the velocity
0
v and travels up
on the circle with a velocity which diminishes in intensity; at the extreme position
P ,
the velocity vanishes. Returning on the travelled arc of circle, the velocity increases; the
particle passes through the initial position
0
P
and reaches the lowest point P
′
of the
trajectory, where it has the maximal velocity; then the velocity decreases till the particle
reaches the point
P
′
for which θα
=
− . The particle returns then to P
′
and
P
a.s.o.
Hence, the motion is oscillatory. From the relation (7.1.38), we also notice that the
velocity
()vt depends only on the position of the particle, being a periodic function of
this position (of angle
θ ); integrating this equation with separate variables, we may
write (during the motion we have
cos cosθα> )
0
0
1d
2
cos cos
tt
θ
θ
ϑ
ω
ϑα
=+
−
∫
,
(7.1.39)
where
0
θ
corresponds to the position at the arbitrary moment
0
t
(which may be
different from the initial moment
0
t ). Hence, one can see that the interval of time
0
tt− depends only on the positions corresponding to the two moments; it results that
the oscillatory motion is periodical, of period
T . We notice too that changing the
direction of motion on the arc of circle the sign of the velocity changes; its modulus
remains the same when passing through the same point, so that the arc
PP
′
is travelled
through in an interval of time
/2T . Because the relation (7.1.38) is even with respect
to
θ , it results that, at points symmetric with respect to the Ox -axis, we have the same
velocity (travelling up or down); hence, the arc
PP
′
is travelled through in a quarter of
period. In this case, the period
T
is given by the relation
0
22 d
cos cos
T
α
ϑ
ω
ϑα
=
−
∫
.
(7.1.39')
Observing that
22
cos cos 2 sin ( /2) sin ( / 2)θα α θ−= −
⎡
⎤
⎣
⎦
and denoting
sin( / 2)θ sink ϕ
=
, sin( / 2)k α= , we may write
0
0
22
1d
1sin
tt
k
ϕ
ϕ
ψ
ω
ψ
=+
−
∫
,
(7.1.40)

Problems of dynamics of the particle
425
where
0
ϕ is specified by the relation
(
)
00
sin /2 sinkθϕ= ; denoting sin zϕ = , we
may also write
()( )
0
0
222
d1
11
z
z
tt
k
ζ
ω
ζζ
=+
−−
∫
,
(7.1.40')
where
0
z is specified by the relation
00
sin zϕ
=
. Introducing, after Legendre, the
elliptic integral of the first kind
()( )
sin
22 2 22
00
dd
(,)
1sin 1 1
z
Fk
kzkz
ϕϕ
ψ
ϕ
ψ
==
−−−
∫∫
,
(7.1.41)
where
ϕ is the amplitude, while k is the modulus of the integral, we obtain
[]
00
1
(,) ( ,)tt F k F kϕϕ
ω
=+ −
.
(7.1.40'')
Denoting
utω= , we may write
00
(,) ( ,)uu F k F kϕϕ−= − ,
(7.1.40''')
where
00
utω
=
. Taking
0
0t
=
, with no loss of generality, and assuming that
0
0θ =
, there results
(
)
000 0
,0zuF kϕϕ=== =
, so that
(,)uF kϕ
=
.
(7.1.42)
As it was noticed by Abel, it is easier to express the angle
ϕ as a function of the
variable
u , in the form
sin sn uϕ
=
, (7.1.42')
where
sn is the symbol of the elliptic sine (the amplitude sine), one of the Jacobi’s
elliptic functions; analogously, one may use the elliptic cosine (the amplitude cosine),
denoted by the symbol
cn ( cos cn uϕ
=
).
Starting from the formula (7.1.39'), the period of the motion is given by
()( )
/2 1
22 2 22
00
d44 4 d
()
1sin 1 1
z
TKk
kzkz
π
ϕ
ωω ω
ϕ
== =
−−−
∫∫
,
g
l
ω =
,
(7.1.43)
where
() ( /2,)Kk F kπ= is the complete elliptic integral of the first kind. Observing
that
2
1k <
, one obtains the development into series (we use Newton’s binomial series)
MECHANICAL SYSTEMS, CLASSICAL MODELS
426
()
1/2
22 2 2
22
1
(2 )!
1 sin 1 sin
2(!)
nn
n
n
n
kk
n
ϕϕ
∞
−
=
−=+
∑
.
This series is absolute and uniform convergent on the interval
[
]
0,2π , and we may
integrate it term by term; taking into account Wallis’ formula
/2
2
22
0
(2 )!
sin d
2
2(!)
n
n
n
n
π
π
ϕϕ=
∫
,
(7.1.44)
one obtains the period
[]
2
2
44
1
(2 )!
21 sin
2
2(!)
n
n
n
n
l
T
g
n
α
π
∞
=
⎧
⎫
=+
⎨
⎬
⎩⎭
∑
.
(7.1.43')
Because we may develop
sin( /2)α into an absolute convergent series with respect to
α too, we obtain also for T such a development, of the form
24
2
11
2 1 ...
16 12
16
l
T
g
αα
π
⎛⎞
=+++
⎜⎟
⎝⎠
.
(7.1.43'')
We observe that the ratio between the second and the first term of the series is equal to
2
/16α
; as well, the ratio between the third and the second term is given by
2
(11/12) /16α a.s.o. Hence, the series is rapidly convergent; practically, we may take
2
21
16
l
T
g
α
π
⎛⎞
=+
⎜⎟
⎝⎠
.
(7.1.43''')
If
0.4α = (it corresponds to the angle 22 55 06
′
′′
°
), then the correction brought by the
second term of the development is not greater than
%1 . The astronomic watches have
amplitudes of
130
′
° , corresponding a correction of approximately 0.05‰ . In general,
the period
T
depends on the angle α , but is independent of the mass m of the
particle. In the case of small oscillations around a stable position of equilibrium (in
Chap. 4, Subsec. 1.1.7 we have seen that the point
P
′
represents a stable position of
equilibrium), the equation (7.1.38') has the form (we approximate
sin θ
by
θ
)
2
0θωθ
+
=
,
(7.1.45)
wherefrom
() cos( )ttθαωϕ
=
− ,
(7.1.45')
the angle
ϕ being specified by the initial conditions, while the period is given by
Galileo’s formula
Problems of dynamics of the particle
427
2
2
l
T
g
π
π
ω
==
;
(7.1.45'')
we notice that this result (intuited by considerations of homogeneity in Chap. 1, Subsec.
2.2.4) approximates the development into series (7.1.43''). The period
T thus obtained
depends on the length
l of the pendulum and on the gravity acceleration g at the
respective place on Earth’s surface. Because this period does not depend on the
amplitude
α , we say that the respective motion is isochronic (the small oscillations
around a stable position of equilibrium take place in the same interval of time). A
particle
P left free from
P
without initial velocity reaches the lowest position P
′
in a
time equal to
/4T , which does not depend on the initial position (angle α ); in this
case, this motion is called tautochronous.
Figure 7.9. Simple pendulum.
The equation of motion along the principal normal to the trajectory is written in the
form (Fig.7.9)
2
cos
mv
Rmg
l
θ=− ,
where
R is the constraint force directed towards the centre
O
; taking into account
(7.1.37), we get
(3 2 ) (3 cos 2 cos )
mg
Rxamg
l
θα=−= −.
(7.1.38'')
One obtains
max
(3 2cos )Rmg α=− . The constraint force diminishes if the particle
P becomes closer to the extreme positions P and P
′
; it vanishes for 2/3xa= , then it
changes of sign (in case of a bilateral constraint). From (7.1.37) too, we notice that
xa> during the motion; the constraint force vanishes if 2/3aa> , hence for 0a < .
On the other hand,
2/3al>− , so that 3/2al>− ; it results that the constraint force
MECHANICAL SYSTEMS, CLASSICAL MODELS
428
vanishes only for
3/2 0la−<< (hence, cos 0α
<
and /2απ> ). Replacing the
expression of
a , we find the condition
()
00 0
232gx v g l x<< +
,
(7.1.46)
which must be fulfilled by the initial velocity, at the initial position, so that the particle
be capable to reach the position (in any case, above the horizontal diameter) at which
the constraint force may vanish. In particular, if
0
xl
=
, then we have
0
25gl v gl<< .
(7.1.46')
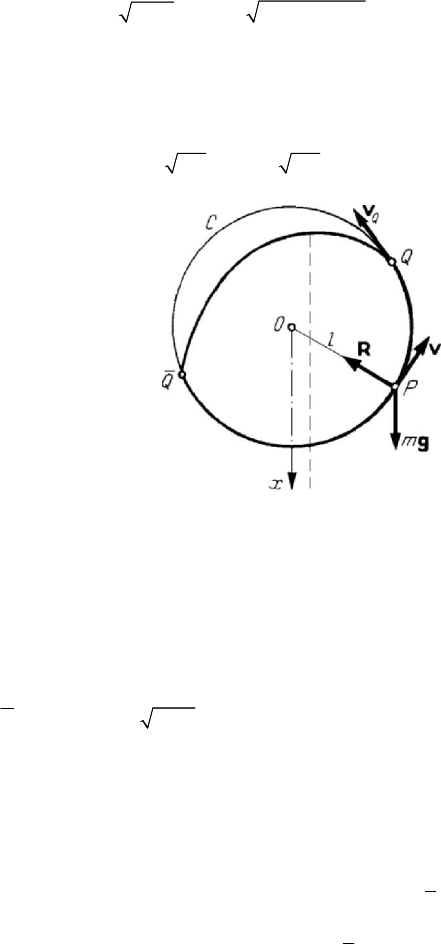
Figure 7.10. Simple pendulum; unilateral constraint.
If the constraint is unilateral, being obtained with the aid of a perfect flexible,
torsionable and inextensible thread, then that one is tensioned if
R is positive. At the
moment at which
0R = (at the point Q , Fig.7.10), the particle leaves the circle and
moves as a free particle acted upon by its own weight. It will describe thus an arc of
parabola of vertical axis, which is connected to the circle at the point in which the
constraint force vanishes; the particle moves further till it meets again the circle at the
point
Q . If
00
02vgx≤≤ , then the motion is oscillatory even in the case of a
unilateral constraint.
1.3.2 Circular and asymptotic motion
If
2
0
4vgl>
, hence if al
<
− , then the equation (7.1.38) takes the form
(
)
22 2
2(cos ) 2 2sin
2
lglaglal
θ
θθ
=−=−−
(
)
22
2( )1 sin
2
gl a k
θ
=−− ,
(7.1.47)
Problems of dynamics of the particle
429
where
2
2/( )klla
=
− ,
2
01k
<
< ; hence, the angular velocity θ
(the velocity v
too) never vanishes, and maintains its sign. The motion of the particle becomes circular
and periodic (the velocity depends only on the position).
Denoting
2/ 2( )lglaτ =−, we get
()( )
00
00
222
22
dd
2
11
1sin
2
z
z
tt t
k
k
θ
θ
ζπϑ
τ
ϑ
ζζ
=+ =+
−−
−
∫∫
,
(7.1.47')
where
0
θ corresponds to an arbitrary moment
0
t (in general, distinct from the initial
moment) and where we have made a change of variable
sin( / 2)z θ
=
, denoting also
00
sin( /2)z θ=
. Assuming that
00
0t θ
=
=
, it results
0
0z
=
, so that we may use
the equations
sin sn
2
u
θ
= , cos cn
2
u
θ
= ,
(7.1.47'')
where we have introduced the notation
/utτ
=
. The period
T
in which the whole
circumference is described is equal to twice the time necessary to arrive from the lowest
point (
xl= ) to the highest one (xl
=
− ); hence (
00
0t θ
=
=
)
()( )
1
222
00
22
dd
2
11
1sin
2
z
T
zkz
k
π
θ
ττ
θ
==
−−
−
∫∫
(
)
(
)
22
24
113
1...
224
kk
πτ
⋅
⎡⎤
=+ + +
⎢⎥
⋅
⎣⎦
.
(7.1.47''')
The corresponding constraint force is given by the same relation (7.1.38''); if
()
00
32vglx>+, then the constraint force does not vanish and remains with its
positive sign, and if the relation is an equality, then the constraint force vanishes at the
highest point (
xl=− ). We notice that
max
(3 2cos )Rmg α=− ,
min
(3 2cos )Rmg α
=
−+ ,
max
min
5RRmg
=
−=.
(7.1.48)
If
al=−, hence if
2
0
4vgl= , then the equation of motion becomes
22 22
2(1cos)4 cos
2
θ
θω θω
=+=
;
(7.1.49)
by integration, one obtains
()
0
0
11
tan ( ) tan ( )
44
tt
e
ω
θπ θ π
−
+= + .
(7.1.49')

MECHANICAL SYSTEMS, CLASSICAL MODELS
430
For
t →∞ we have θπ→ ; the particle reaches the highest point on the trajectory (a
labile position of equilibrium) in an infinite time; the respective motion is called an
asymptotic motion. The constraint force is given by
(3 2 ) (2 3cos )
mg
Rxlmg
l
θ=+=+
;
(7.1.49'')
in this case
max
5Rmg= , for 0θ
=
. The minimal constraint force
min
Rmg=− , for
θπ= , can be obtained only in the case of a bilateral constraint; in the case of a
unilateral one, beginning with the point
Q , determined by 2/3xl
=
− (hence, by
cos 2 / 3θ =− , corresponding to 131 48 37θ
′
′′
=
° ), the motion is on an arc of parabola.
Analogously, one may study the problem of the swing, which may be modelled as a
simple pendulum with a thread of length variable in time (
()llt
=
).
1.3.3 Motion of a simple pendulum in a resistent medium
Introducing the resistance
R of the medium, tangent to the trajectory and of
direction opposite to that of the velocity, and writing the equation of motion along the
tangent, one obtains
sinml mg Rθθ
=
−−
.
(7.1.50)
Considering a resistance proportional to the velocity (viscous damping), of the form
2Rmlλθ=
, 0λ > , in the case of small oscillations ( sin θθ
≅
), the equation (7.1.50)
becomes
2
20θλθωθ
+
+=
;
(7.1.51)
assuming that
22
ωλ>
and denoting
222
μωλ=−, we obtain the general integral
() e ( cos sin )
t
tAtBt
λ
θμμ
−
=+
,
(7.1.51')
where the constants
A and B may be determined by the initial conditions
(
)
00
tθθ= ,
()
00
tθθ=
. We may thus write (for the sake of simplicity, we assume that
0
0t = )
()
000
1
() e cos sin
t
tt t
λ
θθμλθθμ
μ
−
⎡⎤
=++
⎢⎥
⎣⎦
,
(7.1.52)
()
2
000
1
() e cos sin
t
tt t
λ
θθμωθλθμ
μ
−
⎡⎤
=−+
⎢⎥
⎣⎦
.
(7.1.52')
If, in particular, we have
0
0θ
=
, then the particle departs without initial velocity from
the point
0
P and reaches the point
1
P , where the velocity