Teodorescu P.P. Mechanical Systems, Classical Models Volume I: Particle Mechanics
Подождите немного. Документ загружается.

Problems of dynamics of the particle
451
we find thus again the equations (6.2.29), the latter ones being deduced in the
hypothesis of a uniform motion. In this last case (we have
2
/2 constTmv== too),
we may write
(
)
2
2
222
00
2
dd
d
d
ss
vgqqgqqvv
t
t
αα
αβ β αβ β
′′ ′′
== = =
,
what was to be expected, because
1gqq
α
αβ β
′
′
=
represents a first integral of the system
of equations (7.2.19'''), where one of these equations may be replaced by the respective
first integral.
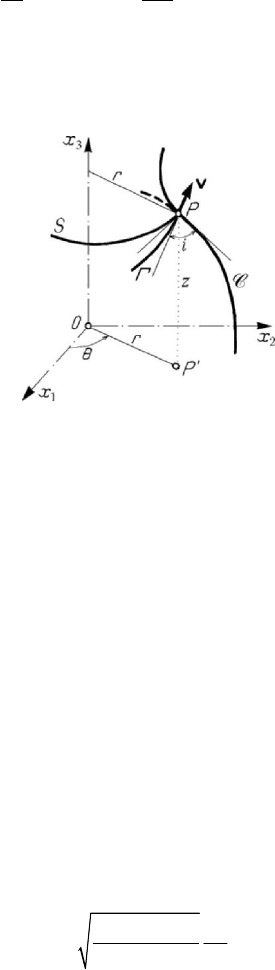
Figure 7.19. Motion of a particle on a geodesic curve of a surface of rotation.
Let us consider, in particular, the case in which the surface
S is a surface of rotation
of parametric equations
1
cosxrθ
=
,
2
sinxrθ
=
,
3
()xz rϕ
=
= , where ,,rzθ are
cylindrical co-ordinates (Fig.7.19); in this case,
(
)
22222
d1 d dsrrϕθ
′
=+ +
,
d/drϕϕ
′
=
. In the case of a uniform motion
222
0
ddsvt= , obtaining thus the first
integral
(
)
22 22 2
0
1constrr vϕθ
′
++==
;
(7.2.20)
we notice that the support of the constraint force passes through the rotation axis, so
that a first integral of areas for the projection
P
′
of the particle P on the plane
12
Ox x
reads
22
00
constrr Cθθ===
.
(7.2.20')
The solution of the problem is thus reduced to quadratures. Eliminating the time
t
between the two first integrals, we obtain
(
)
2222 422
1ddd/rr r kϕθθ
′
++=
,
222
0
/kCv= , so that the equation of the geodesic curves passing through the point
(
000 0
,, ()rz rθϕ
=
) is given by
[]
0
2
0
22
1()
d
r
r
k
k
ϕρ
ρ
θθ
ρ
ρ
′
+
=+
−
∫
;
(7.2.21)

MECHANICAL SYSTEMS, CLASSICAL MODELS
452
the constant
k of the family of geodesic lines is determined imposing the condition that
the respective line passes through a second given point. If the geodesic curve
Γ pierces
the meridian
C of the point P by an incidence angle i , then the components of the
velocity
v along the meridian and the parallel of the point are cosvi and sinvi,
respectively. The moment of the velocity
v with respect to the axis of rotation
3
Ox
will be equal to
C (corresponding to the first integral of areas) and is given only by the
component
sinvi with the arm level r (Fig.7.19); it results that sinrv i C= . Because
0
vv= , one obtains Clairaut’s formula
sinrik
=
, (7.2.22)
where
k is the constant of the family of geodesic lines (the ratio of the constants of the
two first integrals). Reciprocally, if the relation (7.2.22) takes place for all the points of
a curve on a surface, then that one is a geodesic line or a parallel of the surface of
rotation.
2.2 Other applications
In what follows, some particular cases of motion of a particle will be presented, e.g.,
the motion of a particle on a circular helix; as well, some particular methods to solve
problems of dynamics of the particle are considered, for instance the method of
transformation of motions.
2.2.1 Motion of a particle on a circular helix
Let be a heavy particle, constrained to move on a circular helix of parametric
equations
1
cosxRθ= ,
2
sinxRθ
=
,
3
/2 tanxp Rθπ θ α
=
= , where p is the
pitch of the helix, while
α is the angle made by the helix with a horizontal parallel of
the circular cylinder, of radius
R , on which the helix is enveloped (see Chap. 5,
Subsec. 1.3.3, Fig.5.9); in general, we assume that the motion takes place in a resistent
medium, characterized by a viscous resistance
vλ , 0λ > . Euler’s equations of motion
read
mv F v
τ
λ=−
,
2
mv
FR
νν
ρ
=+, 0 FR
ββ
=
+ .
If the initial velocity
0
v is directed so that 0θ
<
(the particle “moves down” on the
helix), then we have
12 3
cos (sin cos ) sinαθ θ α=−−ii iτ ,
12
cos sinθθ
=
−−ii
ν
,
12 3
sin (sin cos ) cosαθ θ α=− − −ii iβ .
so that, for the given force
m
=
Fg we get the components
sinFmg
τ
α= , 0F
ν
=
, cosFmg
β
α
=
− .
Problems of dynamics of the particle
453
The equation of projection along the tangent leads to
()
sin 1
kt
g
ve
k
α
−
=−, k
m
λ
= ,
(7.2.23)
where we have put the initial condition (0) 0v
=
. But /cosvRθα=−
, so that we
obtain (
(0)tanRhθα= )
()
2
sin 2
1
tan
2
kt
hg
kt e
R
kR
α
θ
α
−
=+ −−.
(7.2.23')
In particular, in the case of falling in vacuum (
0λ
=
, hence 0k
=
), we develop
into series the exponential function, obtaining
sinvgt α= ,
2
sin 2
tan 4
hgt
RR
α
θ
α
=−
.
(7.2.23'')
The other two intrinsic equations give the components of the constraint force.
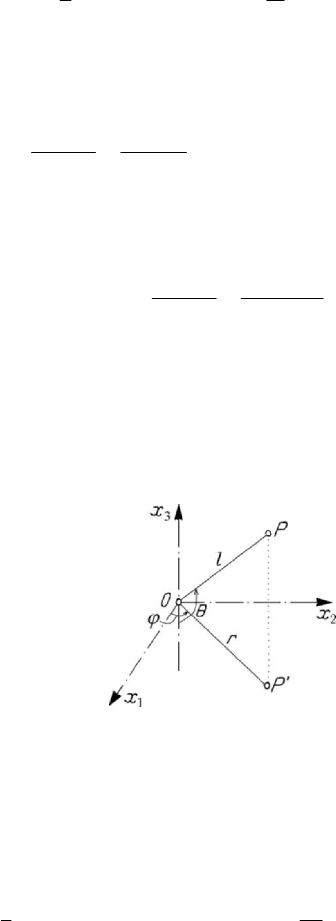
2.2.2 The simple pendulum in a motion of rotation
Let us suppose that the vertical circle on which moves a heavy particle (in particular,
the simple pendulum considered in Subsec. 1.3.1) is rotating with a constant angular
velocity
ω around its vertical diameter. The co-ordinates of the particle are
Figure 7.20. Simple pendulum in a motion of rotation.
1
sin cosxl tθω= ,
2
cos sinxl tθω
=
,
3
cosxlθ
=
− ,
where the applicate
3
x is directed towards the local ascendent vertical (Fig.7.20).
Because the constraint is rheonomic, we use Lagrange’s equation (6.2.21), where
()
22 2 2
1
sin
2
Tmlθω θ=+
,
d
sin
d
Qm mgl θ
θ
=⋅=−
r
g
;
we obtain thus

MECHANICAL SYSTEMS, CLASSICAL MODELS
454
2
sin cos sin 0
g
l
θω θ θ θ−+=
.
(7.2.24)
Introducing the non-dimensional variable
tϕω
=
, we also may write this equation
in the form (
ddtϕω= , d/dθθϕ
′
=
)
(cos )sinθθλθ
′′
=− ,
2
g
l
λ
ω
=
;
(7.2.24')
multiplying by
2θ
and integrating, one obtains the first integral
(
)
22
sin 2 cos constθθλθ−+ =
,
(7.2.24'')
the equation
()θθϕ= of the trajectory being thus obtained by a quadrature.
The above considerations are valid for pendulary motions as well as for circular
ones.
2.2.3 Transformation of motions
We – often – have seen that in the study of a motion one may use the results obtained
for other simpler motions. For instance, we have seen that the study of arbitrary
tautochronous motions is reduced to the study of rectilinear tautochronous motions; that
is, in fact, a transformation of motions.
In Subsec. 2.1.5, an interesting analogy between the equilibrium of a perfectly
flexible, torsionable and inextensible thread and a motion of a particle on a
brachistochrone has been stated; that one may be considered as a transformation of
motion too.
The motion of a particle on a smooth surface may be studied by means of the
equations (6.2.24) with respect to Darboux’s trihedron. Let us deform the surface,
assuming that this is possible, so that the lengths of the lines drawn on the surface do
remain invariable; in such a transformation, also the geodesic curvatures remain
invariant. Let us modify the force
F so that its projection on the plane tangent to the
surface (hence, the components
F
τ
and
g
F ) do remain unchanged; in this case, the first
and the third equation (6.2.24) which specify the motion remain – further – valid, and
the motion is the same as in the first case (the study of this new motion may be much
more simple); obviously, the constraint force given by the second equation (6.2.24) is
another one. In the case of a developable surface, the problem may be – eventually –
reduced to a plane problem. For instance, the trajectory of a heavy particle constrained
to move on a vertical circular cylinder is obtained by enveloping on it a parabola of
vertical axis (obtained by the motion of a heavy particle in a vertical plane). We notice
that, in Subsec. 2.2.1, we have considered the case of a heavy particle constrained to
move on a circular helix, which is a geodesic line of the circular cylinder on which lays
the curve; but that problem is different from that mentioned above, which may be
solved also by means of the equation (7.1.59'). If the initial velocity vanishes or is
directed towards the local vertical, then the trajectory is just this vertical, which is a
geodesic line of the circular cylinder too (in this case,
0
g
F
=
), and the equation
Problems of dynamics of the particle
455
(7.1.59') leads to Torricelli’s formula (7.1.28''). Analogously, the trajectory of a heavy
particle constrained to move on a cone of rotation of vertical axis is obtained
enveloping on this cone the plane trajectory of a particle acted upon by a central force,
the magnitude of which is constant.
In the plane
12
Ox x , let be a particle P of mass m , acted upon by a given force
which depends only on the position (
()
=
FFr); the equations of motion are of the
form
12
(, )mx F x x
αα
=
, 1, 2α
=
.
(7.2.25)
The space homographic transformation
ax b
x
ax c
α
αβ β
α
γγ
+
′
=
+
, ,,, constabac
αγ
αβ
=
, ,, 1,2αβγ
=
,
(7.2.26)
and the time transformation for which
2
d
d
()
t
kt
ax c
γγ
′
=
+
(7.2.26')
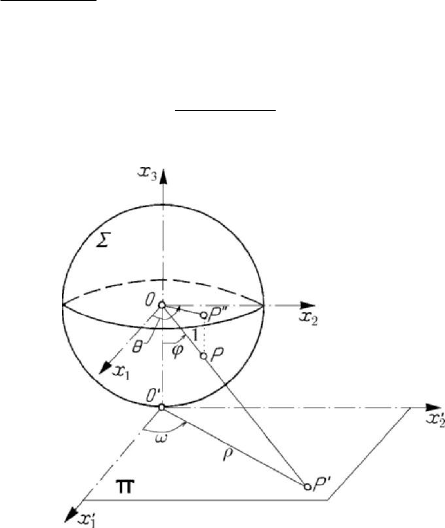
Figure 7.21. Transformation of a spherical motion.
lead to the motion of a particle
P
′
acted upon by a force which depends only on the
position (
()
′
′′
=
FFr) too; P. Appell showed that the trajectory of the particle P
′
is
the homographic transformation of the trajectory of the particle
P , the direction of the
force
′
F being also the homographic transformation of the direction of the force F . In
particular, if
F is a central force, then the force
′
F is a central one too or has a fixed
direction. One may also prove that the most general transformation of the form
()xx
αα
′′
=
r , 1, 2α = , d()dttλ
′
=
r , so that for any ()
=
FFr to have ()
′′′
=FFr,
is a homographic transformation.
MECHANICAL SYSTEMS, CLASSICAL MODELS
456
One may imagine also other transformations of interest, e.g., the transformation of a
spherical motion (on a sphere) in a plane motion. Let thus be a sphere
Σ of radius
equal to unity (for the sake of simplicity) and of centre
O , and a plane Π tangent to
the sphere at the point
O
′
(Fig.7.21). By a central transformation, used in the
geographic map technique, to a point
P of longitude θ and colatitude ϕ on the sphere
we make to correspond a point
P
′
, of polar co-ordinates ,ρω, at which the radius OP
pierces the plane
Π ; thus, to the straight lines of the plane correspond great circles of
the sphere and inversely. We notice that
tanρϕ
=
, ωθ
=
. If the particle P is of
mass equal to unity, then the corresponding equations of motion on the sphere read
(
)
2
dd
sin ( , )
ddtt
θ
ϕΘθϕ=
,
(
)
2
2
2
d
d
sin cos ( , )
d
d
t
t
ϕ
θ
ϕϕ Φθϕ−=
;
(7.2.27)
as well, the equations of motion of a particle
P
′
of mass equal to unity in the plane Π
are written in the form
(
)
2
2
2
d
d
(, )
d
d
R
t
t
ρ
ω
ρρω−=
′
′
,
(
)
2
dd
(, )
ddtt
ω
ρΩρω=
′′
.
(7.2.27')
P. Appell showed that, in the case of a central transformation for which
2
dcosdttϕ
′
= , the equations (7.2.27) become (7.2.27'), where
2
cosR Φϕ= ,
2
cosΩΘ ϕ= . Obviously, the plane motion may be studied easier than the spherical
one.
2.2.4 Motion on synchronous curves and surfaces
Let be – in a fixed plane – a family of curves
{
}
C , which depend on a parameter
and pass through the fixed point
O
. Let us launch from
O
, at the initial moment
0
tt=
, with initial velocities of equal modulus
0
v , identical particles
P
, acted upon by
forces which derive from a given potential; the locus of the positions of the particles
P
at the same moment
t
is the curve
Γ
. The curves
{
}
Γ form a family of curves which
depend on the parameter
t and are called synchronous curves of the curves
{
}
C . If
the family of curves
{
}
C belongs to the three-dimensional space, then the locus of the
positions of the particles
P at the same moment t is a surface Σ ; the family of
surfaces
{
}
Σ
depends on the parameter t and forms the synchronous surfaces of the
curves
{
}
C .
Euler showed that, if
0
0v
=
, the given force corresponding to a gravitational field,
the lines
{
}
C being straight lines in a vertical plane and passing through
O
, then the
synchronous curves
{
}
Γ are circles.
Let be the family of lines
{
}
C , called trajectories, which pass through the point O ,
and the family of lines
{
}
C
′
, called synodal lines, which pass through the same point.
One may prove that there exists an infinity of given conservative forces
F so that a
particle departing from
O with a given initial velocity, along one of the lines
{
}
C
,

Problems of dynamics of the particle
457
reaches a point
P in the same interval of time in which it would reach it along that
curve
{
}
C
′
which would pass through the same point. Obviously, the families of
curves
{
}
C
and
{
}
C
′
may invert their rôles. We mention that, if the synchronous lines
are orthogonal to the trajectories, in a plane motion, then the latter ones coincide with
the synodal lines, being brachistochrones for the considered forces. These problems
have been studied by Fouret, Saint-Germain and Vâlcovici.
2.3 Stability of equilibrium of a particle
In what follows, we make some considerations concerning the stability of
equilibrium of a free or constraint particle, completing thus the results in Chap. 4,
Subsec. 1.1.5; the results thus obtained will be then used for representations in the
phase plane.
2.3.1 Stability of equilibrium of a free particle
In Chap. 4, Subsec. 1.1.7, we have presented the Lagrange-Dirichlet theorem, which
states that a position
0
P of a free particle P , acted upon by a field of conservative
forces is a position of stable equilibrium if the simple potential
U has an isolated
maximum at that point. The demonstration which has been given has rather an intuitive
character; we will use the conservation theorem of mechanical energy for a rigorous
demonstration.
We notice that the potential
()U r is determined making abstraction of an additive
constant; choosing the point
0
P as origin O , we may take (0) 0U
=
. Let be a closed
convex surface
S which contains the point O (e.g., a sphere of centre O ), of arbitrary
small dimensions, so that in the interior and on the surface the function
()U r be
negative, vanishing only at
O . We may assume that there exists 0p > sufficiently
small so that to have
Up−>, hence
0UP
+
<
on the surface
S
. Let
0
P
be an
initial position of the particle
P
in the interior of the surface
S
, the corresponding
velocity being
0
v ; taking into account the conservation theorem of mechanical energy,
we may write
(
)
22
00
/2 /2mv U mv U=+ − ,
0
0U
<
. We may determine the
position and the magnitude of the velocity at the initial moment by the condition
2
00
/2mv U p−<; to do this, it is sufficient – for instance – to take
2
/2 /2mv p< ,
0
/2Up−< . The first relation shows that
0
/vpmη
′
<=
. As well, the function
U
being continuous and vanishing at the origin, it results that there exists
0η > so that
0
OP η< , corresponding
0
/2Up−< . Thus, if – in the interior of the surface S – we
give to the particle an initial position at a distance of
O less than η , with an initial
velocity less than
η
′
, then the conservation theorem of mechanical energy leads to the
inequality
2
/2mv U p<+, which proves that the particle cannot come out from the
interior of the surface
S ; indeed, if the particle P would reach the surface S , then the
sum
Up+ would become negative, situation impossible if we take into account the
previous relation. One may thus state that it corresponds an
0ε > , so that
OP ε<
,
MECHANICAL SYSTEMS, CLASSICAL MODELS
458
()PPt= . As well,
2
/2mv p
<
, because 0U
<
; it results () 2 /vt p m<
0ε
′
=>. The conditions that the point
0
PO
≡
be a stable position of equilibrium are
thus fulfilled and the Lagrange-Dirichlet theorem is proved for a free particle. For
instance, for a free particle in rectilinear motion, acted upon by a force
()Fx kx=− ,
0k > , which derives from the simple potential
2
() /2Ux kx=− , the origin of the co-
ordinate axis represents a stable position of equilibrium.
This demonstration remains valid in the case of a generalized potential
U , where the
rôle of the function which has an isolated maximum is played by the scalar potential
0
U .
In what concerns the reciprocal of this theorem, the problem is not sufficiently
clarified. One may show that, in certain particular cases, a point may represent a stable
position of equilibrium, the potential
U having not an isolated maximum at that point.
Analogously, it is proved that a position of equilibrium
0
P is a position of labile
equilibrium if the potential
U
has an isolated minimum at that point. The conditions
imposed by the Lagrange-Dirichlet theorem are – obviously – sufficient conditions. A
more profound study of this problem will be made latter, after Lyapunov, in connection
with the study of the stability of motion in the frame of Lagrangian or Hamiltonian
mechanics. We mention the affirmation of T. Levi-Civita who said that “the instability
is the rule, while the stability is rather an exception”.
In the case of a non-conservative field of forces, the positions of equilibrium are
recognized – in general – using the property of definition, that is perturbing arbitrarily
such a position and studying the returning modality of the particle.
2.3.2 Stability of equilibrium of a particle subjected to constraints
In the case of a particle constrained to stay on a fixed smooth surface
S , one may
introduce the generalized forces
(,)Quv
α
, 1, 2α
=
, given by (4.1.47), as we have
seen in Chap. 4, Subsec. 1.1.7; if
12
ddd(,)Qu Qv Uuv+= , that is a total
differential, then we are led to the study of the extrema of the function
(,)UUuv= ,
where
u and v are generalized co-ordinates, the holonomic, scleronomic constraints
being eliminated. We may always make so as to have a maximum equal to zero for
U at the point
0
P coinciding with the origin ( (0,0) 0U
=
). We draw a closed curve
C around the point
0
P
, on the surface S , so that to have
0U
<
on that curve;
hence, there exists
0p > so that 0Up
+
< on C . Displacing the particle from
0
P
at a neighbouring point, in the interior of the curve
C , we may follow the
demonstration given in the previous subsection, so that the Lagrange-Dirichlet
theorem is applicable in this case too.
Analogously, if the particle is constrained to stay on a fixed smooth curve
C , we
have seen in Chap. 4, Subsec. 1.1.7 too that the generalized force
()Qq , given by
(4.1.48) may be introduced, hence the function
() ()dUq Qq q=
∫
, being thus led to the
study of the isolated maxima of that function. We assume that
(0) 0U =
at the point
Problems of dynamics of the particle
459
0
P ; then we follow the previous demonstration, displacing the particle in the interior of
an arbitrary interval
[
]
,ηη− , which contains the point
0
P .
Using the potential energy
V given by (6.1.14), (6.1.14') and starting from the
Theorem 4.1.3, we may, finally, state
Theorem 7.2.2 (Lagrange-Dirichlet). The position of equilibrium
0
P of a particle P
subjected to holonomic, scleronomic constraints, in the presence of a field of
conservative forces, the potential energy having an isolated minimum at that point, is a
stable position of equilibrium.
This statement contains the case of the free particle as well the case of a constraint
one (in this case the potential energy must be expressed by means of generalized co-
ordinates, eliminating the constraint relations), where the conservative field may derive
from a simple or a generalized potential. If the potential energy has an isolated
maximum at the point
0
P , then that point represents a position of labile equilibrium.
In particular, in the case of a gravitational field
3
()Vmgx
=
r , one obtains the
Theorem 4.1.2 of Torricelli for a particle constrained to stay on a fixed smooth curve or
on a surface having the same properties.
2.3.3 Small oscillations of a heavy particle around the lowest point of a surface
Let be a surface
S which passes through the origin O , so that the tangent plane at
this point is horizontal, and the surface is over that plane in the vicinity of the respective
point. Corresponding to Torricelli’s theorem, the point
O is a stable position of
equilibrium for a heavy particle
P . Taking the
3
Ox -axis along the local ascendent
vertical, the surface
S may be represented in the neighbourhood of the point O by a
Maclaurin series of the form
22
12
312
12
1
(, )
2
xx
xxx
RR
ϕ
⎛⎞
=++
⎜⎟
⎝⎠
,
(7.2.28)
where
1
R and
2
R are the principal radii of curvature (the extreme values of the radii
n
ρ ) of the surface at O , while
12
(, )xxϕ corresponds to terms of at least the third
degree with respect to the co-ordinates
12
,xx. Let us consider the small motions of the
particle
P around the point O . The simple potential which corresponds to the
gravitational field is
33
()Ux mgx
=
− ; eliminating the constraint relation (7.2.28) and
neglecting terms of higher order, we obtain
22
12
12
12
(, )
2
xx
mg
Ux x
RR
⎛⎞
=− +
⎜⎟
⎝⎠
and the force which acts upon the particle is given by
12
12
12
grad
xx
Umg
RR
⎛⎞
==− +
⎜⎟
⎝⎠
Fii.
MECHANICAL SYSTEMS, CLASSICAL MODELS
460
We obtain thus the equations of motion
2
111
xxω=− ,
2
222
xxω=− ,
2
1
1
g
R
ω =
,
2
2
2
g
R
ω =
.
(7.2.29)
Integrating, it results
11 1 1
cos( )xa tωϕ=−,
22 2 2
cos( )xa tωϕ
=
− ,
(7.2.29')
where the amplitudes
12
,aa and the phase shifts
12
,ϕϕ are determined by the initial
conditions. In particular, if
12
RRR
=
=
, then one obtains the small motions
corresponding to the spherical pendulum (see Subsec. 1.3.7); the general case will be
studied in Chap. 8, Subsec. 2.2.5.
2.3.4 Representations in the phase plane. Topological methods
In Chap. 6, Subsec. 2.2.4 we have seen how one may study the motion of a particle
with a single degree of freedom in the conservative case of equation
()qfq= in the
phase space of co-ordinates
,qp; the results thus obtained may be applied for linear
systems as well as for non-linear ones. As an example, we consider the simple
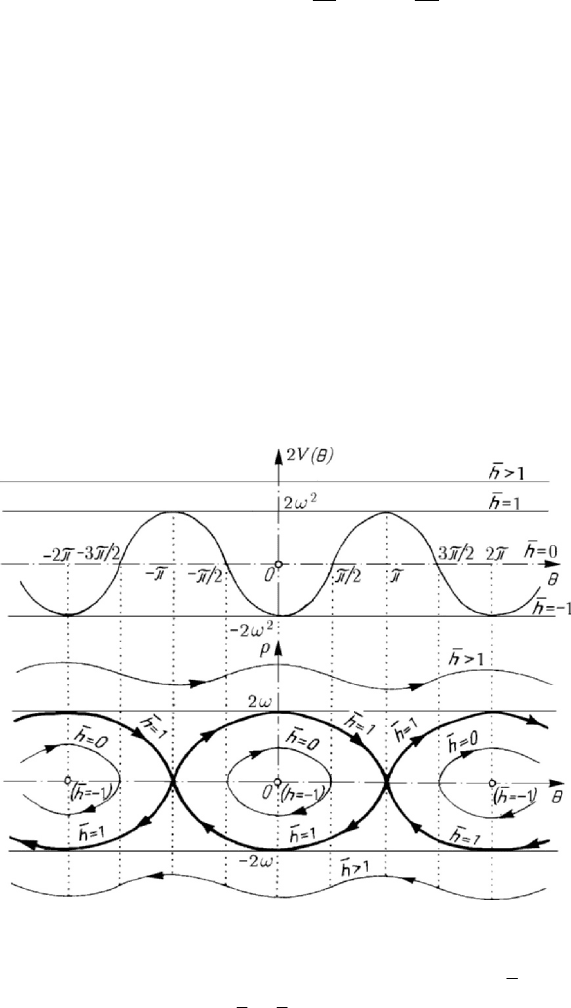
pendulum (see Subsec. 1.3.1) for which (
q θ
=
)
Figure 7.22. Simple pendulum; representation of the motion in the phase plane.
22
2cosphωθ=+, p θ
=
,
2
() cosV θωθ=− ,
2
g
l
ω
=
,
2
2hhω
=
, cosh α
=
− ,