Teodorescu P.P. Mechanical Systems, Classical Models Volume I: Particle Mechanics
Подождите немного. Документ загружается.


Dynamics of the particle with respect to an inertial frame of reference
391
(
)
2
2
d
()
d
q
qq
t
ϕ==
and we obtain
0
0
d
()
q
q
tt
η
ϕη
−=±
∫
,
(6.2.18')
where the position of the particle at the initial moment has been emphasized. The sign
taken in this formula is that of the generalized velocity
q (the sign of the initial
velocity, which is preserved if
q
does not vanish); if
q
vanishes, then the velocity v
vanishes too, while the sign is specified by the sense of the velocity v , hence by the
sense of the tangential component of the given force
F .
The trajectory and the velocity of the particle being determined, in the case of a fixed
curve, as well as in the case of a movable one, we may put in evidence the constraint
force
R , by calculating the scalars
1
λ and
2
λ from two of the equations (6.2.16') (the
system (6.2.16') is – in this case – compatible).
Projecting the equation of motion (6.2.5) on the axes of Frenet’s intrinsic frame, in
case of stationary constraints, we obtain
(,;)mv ms F sst
τ
=
=
,
2
v
mFR
νν
ρ
=+
, 0FR
ββ
+
= .
(6.2.19)
The first of these equations does not contain the constraint force, so that it determines
the motion of the particle along the trajectory (as a matter of fact, multiplying both
members of the equation by
ds , we get the theorem of kinetic energy), while the other
two equations give the components of the constraint force in the plane normal to the
trajectory (in a simpler form as that previously mentioned)
2
v
RFm
νν
ρ
=− +
, RF
ββ
=
− .
(6.2.20)
The first equation (6.2.19) shows that the law of motion does not change if the curve is
deformed without changing its length or by modifying the force
F , but maintaining its
tangential component (only the constraint force is changing); in particular, we may
transform the curve into a straight line, reducing the problem to the study of a
rectilinear motion.
If
F is a conservative force, deriving from a simple potential ()UU
=
r or from a
generalized potential (the simple part of which is
00
()UU
=
r ), then we may write a
conservation theorem of energy in the form (6.1.55) or (6.1.55'); the component of the
constraint force along the principal normal is thus of the form
2
()RF Uh
νν
ρ
=− + +
,
(6.2.20')
MECHANICAL SYSTEMS, CLASSICAL MODELS
392
and is obtained without knowing the motion of the particle on the trajectory (in case of
a generalized potential we replace the function
U by the function
0
U ).
In the general case of rheonomic constraints we may use Lagrange’s equations
(6.1.24'); because we have only one generalized co-ordinate
q , we obtain the
differential equation (
(;)qt=rr )
d
(,;)
d
TT
Qqqt
tq q
∂
∂
⎛⎞
−=
⎜⎟
∂∂
⎝⎠
,
(6.2.21)
where
2
1
2
Tmq
qt
∂∂
⎛⎞
=+
⎜⎟
∂∂
⎝⎠
rr
, (,;)Qt
q
∂
=
⋅
∂
r
Frr
,
(6.2.21')
the unknown function being
()qqt
=
. In particular, we may consider (;)st=rr ,
where
s is the curvilinear co-ordinate along the curve C ; a scalar product of the
equation of motion (6.2.5) by the unit vector
d/ds
=
r
τ
, tangent to the curve C ,
leads to (
0⋅=R τ )
mF
τ
⋅
=⋅=
rF
τ
τ ;
but
s
t
∂
=+
∂
r
r
τ
,
2
2
ss
t
∂
=++
∂
r
r
ττ
,
so that the equation of motion, which is a generalization of the equation (6.2.19),
becomes
2
2
ms F
t
τ
∂
+⋅=
∂
r
τ ,
(6.2.22)
where the unknown function is
()sst
=
.
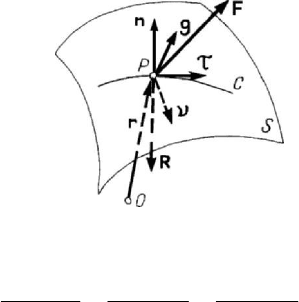
2.2.2 Motion of a particle constrained to stay on a surface
Let
P
be a particle in motion on a smooth movable or fixed surface
S
(Fig.6.8) of
equation (6.2.3) or (6.2.3'). The constraint force is given by (6.2.6) and the equation of
motion becomes
gradmfλ
=
+
rF
; (6.2.23)
in components, we may write
,ii i
mx F fλ
=
+ , 1, 2, 3i
=
. (6.2.23')
Dynamics of the particle with respect to an inertial frame of reference
393
The equations (6.2.3) and (6.2.23') form a system of four scalar equations for the three
unknown functions
()
ii
xxt= and for the parameter λ , which specifies the constraint
force. Thus, the equations (6.2.23') allow to write
Figure 6.8. Motion of a particle constrained to stay on a surface S.
11 22 33
,1 ,2 ,3
mx F mx F mx F
fff
−
−−
==
.
Adding also the equation (6.2.3), we may determine the trajectory of the particle; the
parameter
λ is then given by any of the equations (6.2.23').
In the case of a unilateral constraint (case in which the particle may leave the surface,
remaining on one part of it), one must take into consideration the direction of the
constraint force
R
. Thus, if the force
R
is directed towards the part in which the
particle may leave the surface, that one will remain on the surface. We notice that the
force
R
is directed towards the part of the surface for which
0
f
≷
if
0λ ≷
; hence,
the particle remains on the surface only if the parameter
λ maintains its sign.
Consequently, if this parameter vanishes and changes of sign, then the particle leaves
the surface and moves – further – as a free particle.
In the case of a rheonomic constraint, we may write
grad d d 0
f
ft
⋅
+=
r ,
and the real work of the constraint force is given by
ddgraddd
R
Wfftλλ=⋅ = ⋅ =−
Rr r ;
indeed, the real displacement of the particle is not tangent to the surface frozen at the
moment
t , while the constraint force R is normal to this surface at the point P . If the
constraint is scleronomic (or – at least – catastatic), then
d0
R
W
=
, and the theorem of
kinetic energy can be written in the form (6.1.48); because the particle is constrained to
stay on a surface, and has two degrees of freedom, it is necessary one equation more to
can specify the motion.
Using Darboux’s frame, we may write, in case of a fixed surface,
MECHANICAL SYSTEMS, CLASSICAL MODELS
394
mv F
τ
=
,
2
n
n
v
mFR
ρ
=
+ ,
2
g
g
v
mF
ρ
=
;
(6.2.24)
the first and the last equation determine the motion corresponding to the two mentioned
degrees of freedom, while the second equation gives the constraint force
2
n
n
v
RFm
ρ
=− +
.
(6.2.25)
If the force
F is conservative, deriving – for instance – from a simple potential
()UU= r , we may use the formula (6.1.55), and the constraint force is given by
2
()
n
n
RF Uh
ρ
=− + +
.
(6.2.25')
In the case of a given zero force (
=
F0), the first equation (6.2.24) shows that the
motion of the particle is uniform (the magnitude
v of the velocity is constant in time).
The component of the acceleration along the tangent to the trajectory vanishes, so that
the acceleration is directed towards the principal normal
ν
to the trajectory. The second
equation (6.2.24) emphasizes (
0
n
F
=
) that the acceleration vector is normal to the
surface
S
; hence, at the point
P
, the principal normal to the trajectory of the particle
has the same support as the normal to the surface
S
(
×
=n0
ν
). The last equation
(6.2.24) shows that (
0
g
F = ) the geodesic curvature vanishes; hence, the trajectory of
the particle
P is a geodesic of the surface S , the motion being uniform. This result
may be put in connection with the principle of inertia, the straight line being a geodesic
of the space
3
E ; in this case,
n
ρ →∞, while 0R
=
. It results the constraint force in
the form
2
0
n
v
Rm
ρ
=
,
(6.2.26)
where
0
v is the magnitude of the initial velocity. For instance, a particle which is
constrained to stay on a fixed sphere and is acted upon by a zero force describes a great
circle of it.
We notice that the trajectory is a geodesic if the necessary and sufficient condition
0
g
F = is fulfilled, hence if the force F belongs to the osculating plane of the
trajectory (determined by the unit vectors
τ
and
ν
,
×
=n0
ν
); in this case, the
motion is uniform only if
0F
τ
=
, hence if the given force is normal to the surface S .
If the particle has a uniform motion on a geodesic circle (
1/ const
g
ρ
=
, in the sense
of Darboux), then we have
const
g
F
=
, 0F
τ
=
, so that the given force is normal to
the trajectory, its projection on the tangent plane being constant during the motion. As
well, if
n
RF
=
− during the motion, then the trajectory is an asymptotic line of the
surface.

Dynamics of the particle with respect to an inertial frame of reference
395
As in the preceding subsection, in the case of rheonomic constraints we may use
Lagrange’s equations (6.1.24') in the form (we have two generalized co-ordinates
1
q
and
2
q , so that
(
)
12
,;qqt=rr )
1212
d
(, ,, ;)
d
TT
Qqqqqt
tq q
α
αα
∂∂
⎛⎞
−=
⎜⎟
∂∂
⎝⎠
, 1, 2α
=
,
(6.2.27)
where
2
12
12
1
2
Tm q q
qq t
∂∂∂
⎛⎞
=++
⎜⎟
∂∂∂
⎝⎠
rrr
, (,;)Qt
q
α
α
∂
=⋅
∂
r
Frr
;
(6.2.27')
the unknown functions
1
()qt and
2
()qt may be – eventually – curvilinear co-ordinates
1
s and
2
s on the surface
S
. In this case, taking into account the formula (6.1.24''') and
the results in Chap. 5, Subsec. 1.2.3, the equations of motion read
()
12
,
ms m s s g Q s s
αβ
αγ
ββ
α
βγ
⎧⎫
+=
⎨⎬
⎩⎭
,
Q
s
β
β
∂
=⋅
∂
r
F
,
,1,2αβ
=
,
(6.2.28)
and the unknown functions are
11
()sst
=
and
22
()sst
=
. Making
12
0QQ==
and
noting that one can take the time
t
proportional to the curvilinear co-ordinate s on the
trajectory (the motion is uniform), we find the equations of the geodesic curves
0
sss
αγ
β
α
βγ
⎧⎫
′′ ′ ′
+=
⎨⎬
⎩⎭
, 1, 2α
=
,
(6.2.29)
where
/sss
αα
′
=
∂∂, 1, 2α = .
We have seen that the conservation theorem of the mechanical energy allows – in the
conditions in which this theorem takes place – to determine easily the constraint force,
if the trajectory of the particle is known. In what concerns the conservation theorem of
moment of momentum, the condition
( ) grad
f
λ×+ =×+× =rFR rF r 0
must hold; this condition is fulfilled for any
λ if
×
=rF 0 and grad
f
×
=r0. We
obtain a scalar first integral if the components of the two moments along one of the axes
(for instance,
3
Ox ) vanish. Thus, we start from
1,2 2,1
0xf xf
−
= ; the associate system
of differential equations
123
21
ddd
0
xxx
xx
==
−
leads to the integrals
22
12 1
xxC+=,
32
xC
=
, so that
(
)
22
123
,0
f
fx x x
=
+=.
Hence, the surface
S must be a surface of rotation (with
3
Ox as symmetry axis);
MECHANICAL SYSTEMS, CLASSICAL MODELS
396
indeed, the support of the constraint force intersects – at any moment – the rotation
axis. If the particle
P is constrained to stay on a surface of rotation, while the force F
is coplanar with the symmetry axis of the surface, then we may write a first integral of
the form (6.1.54').
2.2.3 Motion of a particle subjected to constraints with friction
In the case of a constraint with friction, the constraint force R has not only the
normal component
N , which does not allow the particle to leave the constraint, but also
a tangential one
≠T0, which hinders the particle to move in the frame of this
constraint. As in the static case, considered in Chap. 4, Subsec. 1.1.8, in what follows
we use the Coulombian model introduced in Chap. 3, Subsec. 2.2.11, for the force of
friction; we assume that the constraints are holonomic and scleronomic. The force of
friction is tangent to the rough surface or curve on which stays the particle, its direction
being opposite to that of the motion.
In the case of a particle constrained to stay on a rigid fixed or movable curve
C , of
equations (6.2.1), the equation of motion reads
m
=
++
rFNT
. (6.2.30)
We introduce also the relations
f
=
TN,
r
r
v
=−
v
TT
,
(6.2.31)
where
r
v is the relative velocity of the particle; we notice that vers vers
r
+=Tv0.
If the particle is constrained to stay on a rigid fixed or movable surface
S , of equation
(6.2.3), then the equations which determine the unknown quantities will be of the form
(6.2.30) and (6.2.31) too. The relative velocity is given by
r
t
=
−vvv, where
() ()
t
Q
ttQP=+×
vv ω
is the velocity of transportation of the surface (or of the
curve);
Q is a point of the surface (or curve), while ()t
ω
is the instantaneous rotation.
Eliminating the force of friction
T , we obtain the vector equation
t
t
mNfN
−
=+ −
−
vv
rF n
vv
,
(6.2.32)
where
vers grad
f
=n , or the vector equation
11 22 1 2
t
t
mNNf
−
=+ + − +
−
vv
rF n n N N
vv
,
(6.2.32')
where
vers grad
f
αα
=
n , 1, 2α
=
. If the surface
S
(or the curve
C
) is fixed, then
the velocity of transportation vanishes (
t
=
v0).
If we consider the motion on a fixed curve with respect to Frenet’s frame, then we
get
Dynamics of the particle with respect to an inertial frame of reference
397
signmv F fN v
τ
=−
,
2
v
mFN
νν
ρ
=+
, 0 FN
ββ
=
+ ,
(6.2.33)
with
22
NNN
ν
β
=+
; the equations (6.2.33) and (6.2.1') determine thus the unknown
functions
()
ii
xxt= , 1, 2, 3i = , as well as the components ,NN
ν
β
of the constraint
force. Eliminating the constraint force, we may write the equation
2
2
2
d
sign
d
vv
mv mv F f F m F v
s
τν
β
ρ
⎛⎞
==−+−
⎜⎟
⎝⎠
,
(6.2.34)
which gives the velocity
()vvs
=
. In the case of a plane curve, the force F belonging
to the respective plane, we have
0F
β
=
and we get
(
)
2
2
d
d1
d2 d
v
vv
mv m F f m F
ss
τν
ρ
⎛⎞
== −
⎜⎟
⎝⎠
∓
,
(6.2.34')
where the sign corresponds to a direction of the constraint force opposite to the motion.
Integrating, we have
2
()vsϕ= ,
(6.2.35)
where
[]
2() 2() 2()
0
2
() e e e ( ) ( )d
s
fs fs f
sC F fF
m
ψψψσ
τν
ϕσσσ=+ +
∫
∓∓
,
(6.2.35')
with
d
()
s
sψ
ρ
=
∫
, constC
=
.
(6.2.35'')
Hence, we obtain
0
0
d
()
s
s
tt
σ
ϕσ
−=
∫
,
(6.2.35''')
the motion of the particle on the fixed curve
C being thus specified; returning to the
equations of motion (6.2.33), we emphasize the constraint force too.
In the case of a particle constrained to move on a fixed surface
S , we introduce
Darboux’s trihedron and find the equations
mv F fN
τ
=−
,
2
n
n
v
mFN
ρ
=
+ ,
2
g
g
v
mF
ρ
= ;
(6.2.36)
MECHANICAL SYSTEMS, CLASSICAL MODELS
398
these three equations, together with the equation (6.2.3'), form a system of four
equations for the unknown functions
()
ii
xxt
=
,
1, 2, 3i
=
, and the constraint force
N . Eliminating the constraint force between the first two equations, we get a new
equation which, together with the third equation (6.2.36), constitutes a system of two
differential equations for the unknown curvilinear co-ordinates
()sst
αα
=
,
1, 2α =
,
on the surface
S ; thus, the relation (6.2.3') is eliminated, and the co-ordinates which we
use are generalized co-ordinates. The constraint force may be easily determined from
the second equation (6.2.36). If
0
g
F
=
, then the motion takes place as in the case in
which the surface is smooth; that motion is uniform if and only if
FfN
τ
=
, hence if
and only if the tangential component of the given force equilibrates the force of sliding
friction.
2.2.4 Motion of a particle with a single degree of freedom in the conservative case
In the case of a particle (or of a mechanical system) with a single degree of freedom,
for which the equation of motion is of the form
()qfq
=
,
(6.2.37)
where
q is the generalized co-ordinate, we may set up a first integral of energy of the
form
()
[
]
22
00
2()qq UqUq−= −
,
() ()dUq fq q=
∫
,
(6.2.38)
by introducing the simple potential
U (or the scalar potential
0
U of a generalized
potential); hence, the corresponding mechanical system is a conservative system. As
well, one can show that a unidimensional conservative mechanical system (with a single
degree of freedom) or a pluridimensional one (if we succeed, by means of the first
integrals, to eliminate the corresponding parameters, obtaining a unidimensional one)
leads to an equation of motion of the form (6.2.37). We notice that this equation
corresponds to a non-linear free oscillation, without damping; the function
()
f
q is thus
a calling force. The equation (6.2.38) can be integrated in the form (6.2.18'), using the
notation
()
[
]
2
00
() 2 ()qq UqUqϕ =+ − .
(6.2.38')
One takes the sign + or – in (6.2.18') as the function
()qt is monotone increasing or
decreasing, respectively. It is necessary that
() 0qϕ ≥ , so that the motion be real.
Observing that
()
2
00
0qqϕ =≥ , we may assume that the function ()qt begins to
increase together with
t (corresponding to the direction of the initial velocity); the sign
+ is thus chosen. A study of the variation of the function
()qϕ and of its zeros leads to
interesting conclusions concerning the motion of the particle (or of the mechanical
system).
Noting
qp= , we may replace the equation (6.2.37) by the system
Dynamics of the particle with respect to an inertial frame of reference
399
d
d
q
p
t
=
,
d
()
d
p
f
q
t
= ,
(6.2.39)
which leads to
()
d
d
f
q
p
qp
= ;
(6.2.39')
the motion of the particle is thus equivalent to the motion of a representative point
P in
the phase space of co-ordinates
,qp. The trajectory C in this space pierces the Oq -
axis by a right angle, and the tangent to it is parallel to this axis for
() 0
f
q = , 0p ≠ ;
if we have also
0p = , then one obtains a singular point, corresponding to a position of
equilibrium, as it results from the system (6.2.39).
Expressing the first integral (6.2.38) in the form
2
2()pVqh+=,
2
00
2( )hq Vq=+ , () ()Vq Uq
=
− ,
(6.2.40)
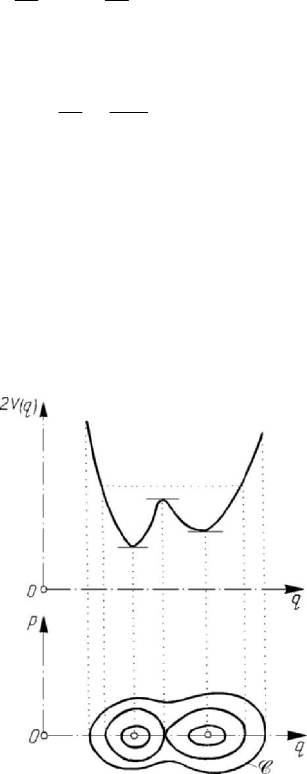
Figure 6.9. Motion of a particle with a single degree of freedom
in the conservative case.
where h is the energy constant, we notice that the trajectory C is symmetric with
respect to the
Oq
-axis and is situated in the domain 2()Vq h
≤
. On the basis of the
Lagrange-Dirichlet theorem (see Chap. 4, Subsec. 1.1.7), to the points of local
minimum of the potential energy
()Vq correspond stable positions of equilibrium,
while to the points of maximum correspond labile positions of equilibrium (Fig.6.9).
From the first equation (6.2.39), we see that – for
0p >
– q increases together with
the time
t , so that we may specify the direction of the trajectory. We obtain the period
of the motion in the form

MECHANICAL SYSTEMS, CLASSICAL MODELS
400
dp
T
q
=
∫
,
(6.2.41)
integrating along a closed curve.
2.2.5 Study of a dissipative mechanical system with a single degree of freedom
If, during the motion, intervenes the friction too, then the mechanical energy is no
more conserved, but diminishes in time, due to the phenomenon of dissipation.
Assuming that the force of friction is a function of velocity, the equation of motion
becomes
() ()qfq Fq=+ , () 0qF q
≤
,
(6.2.42)
the last relation emphasizing that the damping force
()Fq is opposite to the velocity; in
fact, the equation (6.2.42) characterizes the damped non-linear free oscillations, in the
unidimensional case (with a single degree of freedom). In the case of forced
oscillations, this equation is completed in the form
() () ()qfq Fq t=++ F , () 0qF q
≤
,
(6.2.42')
where we have introduced also the perturbing force
()tF . In the case in which the
product
()qF q is positive for small values of the velocity modulus q and negative for
great values of the same modulus, one obtains self-sustained oscillations.
As in the case of undamped oscillations, the equation (6.2.42) leads to
() ( )
d
d
f
qFp
p
qp
+
=
(6.2.43)
in the phase space, a field of vectors being thus defined, excepting the positions of
equilibrium (singular points). In the case in which the calling force
()
f
q is linear
(
()
f
qq= ) one can build up a polygonal line, which approximates the integral curve;
this procedure, due to Liénard, has been extended by J.L. Brown for the case in which
()
f
q is a non-linear function (the case of non-linear free oscillations).