Teodorescu P.P. Mechanical Systems, Classical Models Volume I: Particle Mechanics
Подождите немного. Документ загружается.

MECHANICAL SYSTEMS, CLASSICAL MODELS
350
1
2
n
n
ω
λ =± ,
(5.3.34')
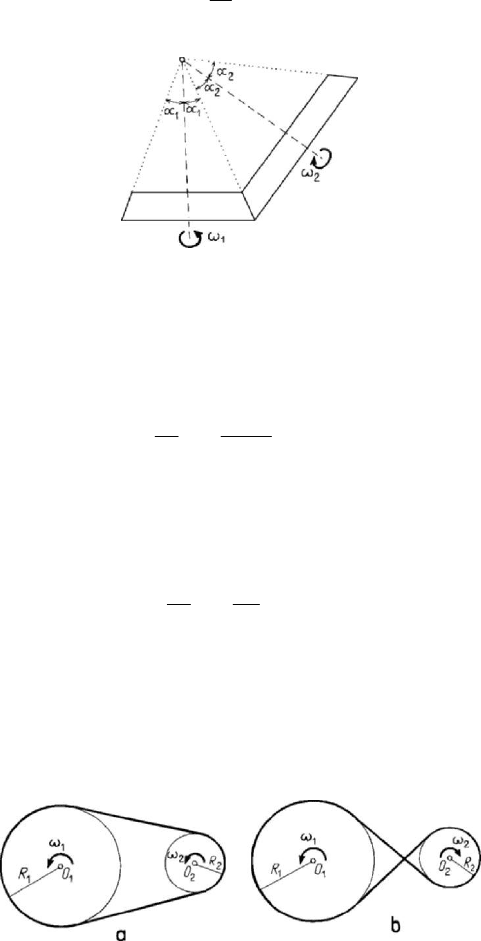
Figure 5.35. Gear wheels with concurrent rotation axes.
where
1
n and
2
n represent the number of rotations per unit time. In the case in which
the rotation axes are concurrent, the wheels are truncated cones of vertex angles
1
α
and
2
α (Fig.5.35), respectively, and we get
12
21
sin
sin
ω
ωα
λ
ωα
==± ;
(5.3.35)
if we have to do with trains of gears, then
1
R and
2
R of the formula (5.3.34) are the
radii of the two centrodes, and the formula may be written also in the form given by
Willis
11
22
N
N
ω
ω
λ
ω
==±,
(5.3.34'')
where
1
N
,
2
N
represent the number of teeth of the two wheels, respectively. We
mention also the trains of gear rack wheels, as well as the helical gear wheels (for
which the rotation axes have arbitrary relative positions). A more complex character
have the planetary and differential trains of gears. We mention also the worm-spiral
wheel trains (endless screw-helical wheel trains).
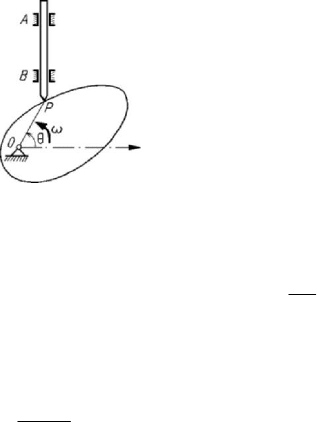
Figure 5.36. Mechanisms with flexible elements (a); using of crossed belts.
The mechanisms with flexible elements may use belts, cables, chains etc. In this
case, the direction of rotation is maintained (Fig.5.36,a); the direction may be changed
Kinematics
351
if crossed belts are used (Fig.5.36,b). The formulae (5.3.34), (5.3.34,b) remain still
valid.
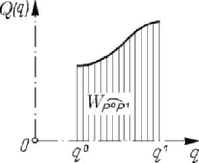
Figure 5.37. Cam gears.
The cam gears are used to transform the motions. The cam plays the rôle of a leading
element, having the pole
O
fixed, while the draw bar AB is the follower,
P
being
the point of contact (Fig.5.37). The point
P is moving after the law
()OP r f t==
,
where
()
f
t is a periodic function; if the cam has a rotation of angle
0
tθω θ=+, then
the shape of the cam is expressed in polar co-ordinates in the form
(
)
0
rf
θθ
ω
−
= .
(5.3.36)
Chapter 6
DYNAMICS OF THE PARTICLE WITH RESPECT TO
AN INERTIAL FRAME OF REFERENCE
Dynamics deals with the motion of mechanical systems subjected to the action of
given forces. We begin this study with a single particle in motion with respect to an
inertial frame of reference; as it was shown in Chap. 1, Subsec. 1.1.4, it is the frame
with respect to which the basic laws of mechanics are verified. If these laws hold with
respect to a certain frame, in a Newtonian model, then they are verified in any other
frame in rectilinear and uniform motion with respect to the first one, obtaining thus a set
of inertial frames of reference. To study the motion in such a frame, we emphasize the
corresponding general theorems, both for the free and the constraint (frictionless or
with friction) particle.
1. Introductory notions. General theorems
After introducing mechanical quantities which play an essential rôle in the frame of
the Newtonian model, we formulate the problem of the free particle, emphasizing the
methods of solving it; the theorems of existence and uniqueness are thus presented and
stress is put on the notion of first integral. The principle of relativity allows to establish
the Galileo-Newton transformations group. Starting from the general theorems
corresponding to the motion of the particle, one obtains the conservation theorems,
hence the first integrals of the equations of motion; the first integral of areas leads then
to the notion of central force.
1.1 Introductory notions
In what follows, we introduce the notions of momentum, moment of momentum,
work, kinetic and potential energy, power and mechanical efficiency; the conservative
and non-conservative forces are then considered. We mention also the formulation of
the problem of the free particle in motion and the presentation of the equations of
motion in curvilinear co-ordinates.
1.1.1 Momentum. Moment of momentum. Torsor of momentum
We have introduced the notion of momentum in Chap. 1, Subsec. 1.1.6; thus the
momentum (linear momentum) of a particle
P
of position vector r with respect to a
given fixed frame of reference (which is supposed to be inertial), is expressed in the
form
35 3
MECHANICAL SYSTEMS, CLASSICAL MODELS
354
mm
=
=
Hvr
(6.1.1)
and is a vector collinear with the velocity
v
of the respective particle.
The moment of the momentum with respect to the pole
O of the frame of reference
is called moment of momentum (angular momentum) of the particle, with respect to this
pole, and is given by
2
OO
mm m=×=×=×=
Ω
KrHrv rr , (6.1.2)
where we have introduced the areal velocity (5.1.16). In general, we may consider a
moment of momentum with respect to any given fixed point (fixed with respect to an
inertial frame of reference).
In components, we have
iii
Hmvmx
=
= , 2
j
Oi Oi ijk k
Km mxxΩ
=
=∈ ,
1, 2, 3i
=
. (6.1.3)
The notion of torsor, introduced in Chap. 2, Subsec. 2.1.3, allows to write
{
}
() ,
OO
τ
=HHK;
(6.1.4)
hence, the set formed by the linear and angular momentum of a particle represents the
torsor of the momentum of the respective particle with respect to the considered pole.
We notice that the torsor (6.1.4) may be obtained from the torsor (5.1.16') multiplying it
by the mass
m . The notion of torsor plays thus – in the problems of dynamics – a rôle
analogous to that performed in statics.
1.1.2 Work. Kinetic and potential energy. Conservative forces
The notion of work (mechanical work) has been introduced in Chap. 3, Subsec.
2.1.2, in the form of real elementary work (3.2.3); considering only real displacements,
we may omit the adjective “real” in what follows. In this case, the elementary work of
the given forces is of the form
ddd
ii
WFx
=
⋅=Fr , (6.1.5)
where
F
is the resultant of the given forces which act upon the particle
P
, which
effects a real displacement
dr
; analogously, the elementary work of the constraint
forces is given by
ddd
ii
R
WRx
=
⋅=Rr , (6.1.5')
where
R is the resultant of the constraint forces applied at the point P . Using the
property of distributivity of the scalar product with respect to the addition of vectors, it
results that the elementary work of a resultant force is equal to the sum of the
elementary works of the component forces which act upon the same particle. The same
property allows us to state that the elementary work of a resultant displacement
is equal to the sum of the elementary works corresponding to successive component
Dynamics of the particle with respect to an inertial frame of reference
355
displacements; in this case, if the particle
P describes a trajectory C between the
points
0
P and
1
P , the work of the given force is expressed by
01 01
01
dd
ii
PP PP
PP
WFx=⋅=
∫∫
Fr .
(6.1.6)
The work is a scalar quantity, expressed in ergs in the CGS-system or in joules in the
SI-system (see also Table 1.1).
We notice that we may express the elementary work in the form
d
dddprprdWtrF=⋅ = =
F
r
Fv F r
(6.1.5'')
too, obtaining – in general – a Pfaff form (it is not an exact differential).
The given force may be of the form
(,;)t
=
FFrr
; if we know the trajectory
()t=rr, then the elementary work depends only on time, and the curvilinear integral
(6.1.6) becomes a simple one. If the position of the particle and the force
F
are
specified by a parameter
q
( ()q
=
rr , ()q
=
FF ), then
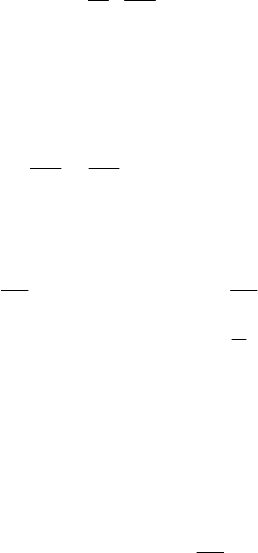
d () ()d () ()d ()d
ii
W q qq Fqxqq Qqq
′
′
=⋅ = =Fr
,
(6.1.5''')
Figure 6.1. Work diagram.
and the work of the given forces is expressed with the aid of a simple integral too; in
this case, we may introduce the work diagram (Fig.6.1), sometimes useful in practice. If
the force
F depends only on the position of the particle ( (;)t
=
FFr), then the work
depends only on the trajectory and is independent on the velocity by which that one is
travelled through.
In the case of a conservative force
F (which derives from a simple potential, being
of the form
gradU=F
, ()UU
=
r , the elementary work becomes an exact
differential
ddWU
=
, (6.1.7)
the work
W depending only on the extreme positions of the particle
(
01
0
1
() ()
PP
WUU=−rr). If the trajectory C is a closed curve, then the
corresponding work vanishes (
0
C
W
=
).
MECHANICAL SYSTEMS, CLASSICAL MODELS
356
In the case of a quasi-conservative force, which derives from a simple quasi-
potential
(;)UU t= r , the elementary work is no more an exact differential, but is of
the form
dgraddd dWU UUt=⋅=−
r ,
(6.1.8)
where we emphasized the partial derivative with respect to time.
In Chap. 1, Subsec. 1.1.12, we have introduced the generalized potential
00jj
UUUvU=⋅+ = +Uv , (6.1.9)
where
00
()UU
=
r and ()UU
=
r are scalar and vector potentials, respectively. The
components of the conservative force, defined by means of this potential, are of the
form
[
]
j
j
FU
=
, 1, 2, 3j
=
, (6.1.10)
where we have put in evidence the Euler-Lagrange derivative, corresponding to the
index
j , given by
[]
,
d
d
j
j
j
U
UU
tx
∂
⎛⎞
=−
⎜⎟
∂
⎝⎠
;
(6.1.10')
this derivative corresponds to the formula (1.1.88) and allows to express these
components by a formula analogous to (1.1.82). Taking into account (6.1.9) and noting
that
j
jj
UU
U
xv
∂
∂
==
∂∂
,
we obtain
()
0
dd
grad grad
dd
UU
tt
=−= ⋅+−
UU
FUv
.
(6.1.11)
Replacing the vector potential U by the vector potential
gradϕ=+UU
, ()ϕϕ= r ,
and taking into account the relation
d/d gradtϕϕ
=
⋅v , as well as that one may
invert the order of application of the operators (
grad(d / d ) (d/ d )gradtt
=
) for a
function
ϕ of class
2
C , we find the same force F ; hence, the vector potential is
determined abstraction of a field of gradients. The velocity
v
being a function only on
time, the formula (A.2.31) allows us to write
d
grad( ) ( ) curl curl
dt
⋅=⋅∇+× = +×
U
UvvUvU vU
;
Dynamics of the particle with respect to an inertial frame of reference
357
taking into account (6.1.9), we may express the conservative force
F in the form
(
)
00,
,,
grad curl
j
j
kj jk k
UUUvU=+×=−+
⎡
⎤
⎣
⎦
FvU i
.
(6.1.11')
The above observation concerning the transformation of a vector potential
→UU is
easily verified (
curl gradϕ
=
0 ).
In the case of a generalized quasi-potential, the two quasi-potentials are of the form
00
(;)UU t= r and (;)t=UUr, respectively; the expression (6.1.11) of the quasi-
conservative force remains still valid. Noting that
d/d ( )t
=
⋅∇ +
UvUU, where the
point indicates the partial derivative with respect to time, we may express the force
F
in the form
0
grad curlU=+×−
FvUU.
(6.1.11'')
If to the transformation of vector quasi-potential
→UU, considered above, we
associate the transformation of scalar quasi-potential
000
UUUϕ→=+ , hence if we
effect the transformation
d/dUUU tϕ→=+
, then the form (6.1.11) (or the form
(6.1.11')) of the quasi-conservative force remains invariant; that is a gauge
transformation.
In the case of a conservative force which derives from a generalized potential, the
elementary work is given by
0
ddgradd(,curl,d)WU=⋅ = ⋅ +Fr r v Ur,
hence it is a total differential
0
ddWU
=
. (6.1.12)
Thus, the formulae (6.1.11') and (6.1.12) show that the scalar potential
0
U
plays the
rôle of the simple potential in the frame of the generalized potential (6.1.9), and the
vector potential has no contribution in what concerns the elementary work; all the
considerations made for the simple potential remain still valid. If the force is quasi-
conservative, deriving from a generalized quasi-potential, we obtain
00 0 0
dd d dd( )dWUUt U Ut=−−⋅=−⋅+
Ur Uv
(
)
00,
(grad ) d d
j
jj
UUUx=−⋅=−
Ur ;
(6.1.12')
one can easily see that the gauge transformation mentioned above has not one influence
on this elementary work too.
We notice also that a conservative force derives always from a generalized or a
simple potential as it depends or not explicitly on the velocity of the particle.
The notion of work appeared in XIXth century with the occasion of experiments
concerning the transformation of mechanical motion into heat (a non-mechanical form
MECHANICAL SYSTEMS, CLASSICAL MODELS
358
of motion of the matter); one observes that in this transformation there is a constant
ratio between the effected work and the obtained heat. The work represents thus a
measure of the mechanical motion of a particle, which is transformed in a non-
mechanical motion of it.
As well, the work allows a dynamic measurement of the action of a force. The
positive work is a motive work
m
W , which puts the particle in motion, while the
negative work is a resistent work
r
W for which it is necessary to use up external
energy. The work vanishes if the force or the displacement vanish or if they are
perpendicular one to the other.
We notice that one may use a quantity of state to characterize the mechanical motion
of a particle. Indeed, taking into account Newton’s basic law (1.1.89''), we have,
successively,
ddd
dd()d d dd
ddd
W mmmm
ttt
=⋅ = ⋅ = ⋅ = ⋅ = ⋅
vr
Fr v r r v vv
(
)
(
)
22
d1 d1
d
d2 d2
mmvT
tt
===v
,
introducing the scalar quantity
22
11
22
Tm mv==v
,
(6.1.13)
called kinetic energy of the particle
P ; this quantity depends on the mass and the
velocity of the particle. Taking into account the above considerations concerning the
work, it follows that the kinetic energy is a quantity of state of the particle, which
measures its mechanical motion and its capacity to be transformed into a non-
mechanical motion.
Taking into account the modality of introducing the kinetic energy, we notice that
the simple potential
U (or the scalar potential
0
U ) is a quantity of energetical nature;
hence, we introduce the function
VU
=
−
(6.1.14)
or
0
VU
=
−
, (6.1.14')
where
()VV
=
r is called potential energy.
The sum
ETV
=
+
(6.1.15)
is called total mechanical energy (or mechanical energy).

Dynamics of the particle with respect to an inertial frame of reference
359
1.1.3 Power. Mechanical efficiency. Power of non-conservative forces
The quantity
d
d
W
P
t
=
(6.1.16)
is called power (mechanical power) and is measured in erg/s in the CGS-system or in
J/s=W in the SI-system (see Table 1.1); in practice, 1 HP=75 kgf · m/s (HP means
horse-power) is used too. Taking into account (6.1.5), we may also write
d
d
P
t
=
⋅=⋅
r
FFv
.
(6.1.16')
This quantity is used to the calibration of motors, engines, apparatuses etc.
Assuming that an engine may be modelled as a particle, the motive work is equal to
the resistent one (
mr
WW= ), in a regime working of it; here and in what follows we
consider the work in absolute value (always positive). We notice that the resistent work
is formed by the useful work
u
W , realized by the engine for the goal for which it was
built up, and by the passive (lost) work
p
W
, used up by the passive forces (frictions,
various resistent forces etc.); we have thus
mup
WWW
=
+
, the engine playing the
rôle of a transformer of work. To the motive, the useful and the passive work
correspond the motive power
m
P , the useful power
u
P and the passive power
p
P
(
mup
PPP=+
), respectively, taken – in what follows – also in absolute value (always
positive).
We call mechanical efficiency the ratio
111
pp
uu
mmmm
WP
WP
WWPP
η ==−==−<
,
(6.1.17)
which is always subunitary (if not, the engine would be a “perpetuum mobile”), being a
transfer function of the power; the ratio
//
pm pm
WW PP
=
put in evidence is the loss
factor.
If we introduce the force transmission factor and the velocity transmission factor
(used in Chap. 5, Subsec. 3.3.3) by relations
m
F
u
F
F
λ = ,
m
v
u
v
v
λ = ,
(6.1.18)
where
m
v
and
u
v
are the components of the velocity (in modulus) along the direction
of the motive force
m
F and of the useful force
u
F , respectively, we may write
umm
v
F
muu
PFv
PFv
ηλ λ = ;
noting that
mmm
PFv= and
uuu
PFv
=
, we get
MECHANICAL SYSTEMS, CLASSICAL MODELS
360
Theorem 6.1.1 (the black box law). The product of the force transmission factor by the
velocity transmission factor and by the mechanical efficiency of an engine is equal to
unity
1
v
F
λλη
=
. (6.1.19)
Because the transmission factors may be obtained experimentally, this law determines
the mechanical efficiency, so that it is not necessary to disassemble the engine for this (as
it would be in the interior of a black box). In the case of an ideal engine (for which
1η = ,
the friction being so small that it can be neglected), we obtain
1
v
F
λλ
=
; (6.1.19')
in this case, the force transmission factor is the inverse of the velocity transmission
factor.
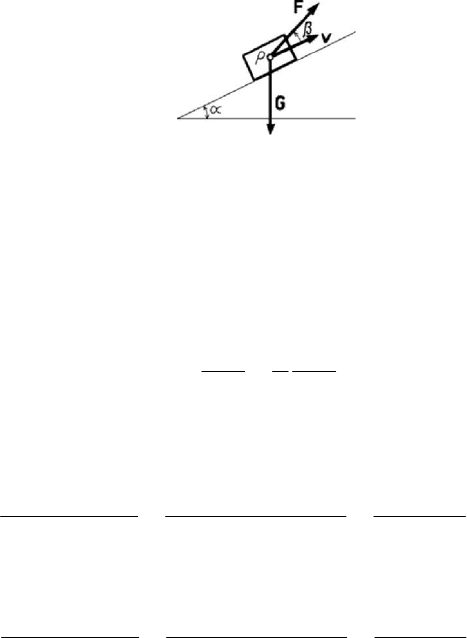
Figure 6.2. Case of inclined plane.
For instance, in the case of the inclined plane (which makes an angle
α with the
horizontal line (Fig.6.2)) with friction (coefficient of sliding friction
tan
f
ϕ= ),
considered in Chap. 4, Subsec. 2.1.6, which allows to move up a rigid solid (modelled
by a material point
P ), of weight G , with the aid of a force F (which makes the angle
β
with the inclined plane), we have (
m
FF
=
,
u
FG
=
, cos
m
vvβ
=
, sin
u
vvα= )
1sin
cos
v
F
G
F
α
η
λλ β
==
;
if the inclined plane is used to move up a rigid solid, then we use the relation (4.2.13)
and obtain the mechanical efficiency
sin cos( ) sin (cos sin )
1tan
cos sin( ) cos (sin cos ) 1 cot
f
f
ff
αβϕ αβ β
β
η
βαϕ βα α α
−+
+
== =
+++
,
(6.1.20)
while if it is used to move down the heavy bodies, then the relation (4.2.14) leads to
sin cos( ) sin (cos sin )
1tan
cos sin( ) cos (sin cos ) 1 cot
f
f
ff
αβϕ αβ β
β
η
βαϕ βα α α
+−
−
== =
−−−
.
(6.1.20')
If
0β = , then we obtain