Teodorescu P.P. Mechanical Systems, Classical Models Volume I: Particle Mechanics
Подождите немного. Документ загружается.

MECHANICAL SYSTEMS, CLASSICAL MODELS
340
where the angular velocity and acceleration are given by the formulae (5.3.7'), (5.3.15'),
respectively.
We mention that the formula (5.3.19) may lead to a torsor of the angular
accelerations, less useful that the torsor of the angular velocities, because of its
complicated form.
3.3 Kinematics of systems of rigid solids
After some general considerations concerning the systems of rigid solids (called also
multibody systems, where it is understood that the bodies are rigid ones), we introduce
the notion of mechanism, as an example of such systems; the results thus obtained allow
to present some applications concerning the transmission of displacements, velocities
and accelerations.
3.3.1 Systems of rigid solids
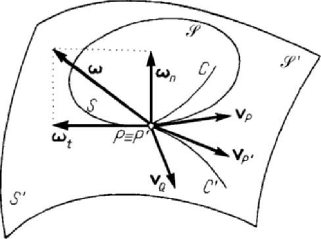
The results obtained for the relative motion of a rigid solid may be used also for
systems of rigid solids. Let be thus two rigid solids
S and
′
S , bounded by two
convex surfaces
S and S
′
, respectively, which at any moment t , have the same
tangent in an ordinary common point
PP
′
≡
, PS
∈
, PS
′
′
∈
(Fig.5.29); we assume
that the solid
′
S is fixed, while the solid S is movable, remaining at any moment in
contact with the solid
′
S . Let us suppose that a movable point Q coincides with
PP
′
≡ at any moment t ; the locus of the point Q with respect to the movable
surface
S is a curve C , its velocity
P
v being a relative velocity, and with respect to
the fixed surface
S
′
a curve C
′
, its velocity
P
v , being an absolute velocity. Taking
into account the relation (5.3.3), we obtain the velocity of the point
Q as a velocity of
transport with respect to the surface
S
′
in the form
Figure 5.29. Motion of a rigid solid over another rigid solid.
QP
P
′
=
−vvv
. (5.3.21)
Because the velocities
P
′
v and
P
v are contained in the common tangent plane, the
velocity
Q
v which characterizes the sliding of the surface S over the surface S
′
will
Kinematics
341
belong to the same plane. The distribution of the velocities is known if, besides the
velocity
()
Q
tv , the angular velocity ()t
ω
, which passes through the point P , is also
given. The motion of the rigid solid
S with respect to the rigid solid
′
S is thus
characterized by a translation of velocity
()
Q
tv and by a rotation of angular velocity
()tω . The vector ()tω may be decomposed in two components: an angular velocity
()
n
tω , along the normal to the tangent plane, which characterizes a pivoting about the
respective axis, and an angular velocity
()
t
t
ω
, contained in the tangent plane, which
characterizes a rolling about the corresponding axis. We can say that the general motion
of the rigid solid
S over the rigid solid
′
S takes place so that the surface S is rolling
and pivoting with sliding over the surface
S
′
. If
()
Q
t
=
v0
, then the motion of the
rigid solid
S over the rigid solid
′
S is an instantaneous rotation (pivoting and
rolling) about an instantaneous axis of rotation passing through the point of contact.
The fixed axoid intersects the surface
S
′
after the curve C
′
, while the movable axoid
intersects the surface
S
after the curve
C
; in this case,
P
P
′
=
vv, so that the curve
C
is rolling without sliding over the curve
C
′
during the motion. If
Q
≠
v0 but
n
= 0ω
(
t
=ωω), then the surface S is rolling with sliding over the surface S
′
, along an
instantaneous axis of rotation and sliding; if
Q
=
v0 too, then the motion is only a
rotation without sliding.
Let be the frames
1
R ,
2
R ,…,
n
R
. rigidly linked to the rigid solids
1
S ,
2
S ,…,
n
S
, respectively. Denoting by
j
k
ω
the angular velocity in the motion of the frame
j
R
with respect to the frame
k
R and by (/ )
j
∂
∂ V the derivative with respect to time of a
vector
V in the frame
j
R , we may write
1,
1
ii
i
i
+
+
∂∂
=+×
∂∂
VV Vω ,
1,2,..., 1in
=
−
,
1,
1
n
n
∂
∂
=
+×
∂∂
VV Vω ;
summing with respect to
i and noting that the vector V is arbitrary, we obtain the
relation (equivalent to the relation (5.3.7'))
21 32 , 1 1,
...
nn n−
++ + =0ωω ω ω , (5.3.22)
which links the relative rotations of
n rigid solids. In particular, one obtains the
remarkable relations
ij ji
+=0ωω ,
ij
ik kj
=+ωωω, ijki
≠
≠≠, , , 1, 2,...,ijk n
=
. (5.3.22')
Starting from

MECHANICAL SYSTEMS, CLASSICAL MODELS
342
ij ij ji ij
ij
OO OO OO
∂∂
=+×
∂∂
J
JJJJGJJJJJG JJJJJG
ω ,
ij i j
OO
=
−
J
JJJJG
rr,
we find also the relation
ij ji ij i ji j
+
+×+×=vv r r0ωω , ij
≠
, , 1,2,...,ij n
=
, (5.3.23)
complementary to the first relation (5.3.22'), where
ij
v is the velocity of the pole
i
O of
the frame
i
R with respect to the pole
j
O of the frame
j
R
. Starting from the relation
(5.3.7) and using the relation (5.3.23), we get the relation
11
1, 1, 1, 1 1, 1
11
nn
ii n ii i n
ii
−−
+++
==
++ ×+×=
∑∑
vv r r0ωω
, 2n ≥ ,
(5.3.24)
corresponding to the frames
1
R ,
2
R ,…,
n
R
, the position vectors being those of a
point
P of the rigid solid with respect to the above mentioned frames. We mention that
one may write the relation (5.3.24) also in the form
11
1, 1, 1 1, 1 1,
11
nn
ii n i ii n
ii
PO PO
−−
+++
==
++ × +×=
∑∑
J
JJJJJG JJJJG
vv 0ωω,
2n ≥
;
(5.3.24')
the formulae (5.3.22) and (5.3.24') allow thus to use the static-kinematic analogy for the
sliding vectors
1,ii+
ω ,
1,2,..., 1in
=
−
, and
1,n
ω
, the velocities
1,ii+
v ,
1,2,..., 1in=−, and
1,n
v playing the rôle of moments of those vectors.
The relation (5.3.13) may lead, on the same way, to some interesting results.
Noting that
j
ijijiji ij
ij j
∂∂ ∂
=+×=−
∂∂ ∂
ωωωω ω
,
we obtain the relation
ij ji
+
=
0
ω
ω . (5.3.25)
The relation (5.3.15') allows to write
12
1, 1, 1,1 2, 1
11
nn
ii n i ii
ii
−−
++++
==
++ ×
∑∑
ωω ωω
(5.3.26)
in this case; in particular, one obtains
ij
ik kj ik kj
=
+−×
ωωωωω. (5.3.25')
Using a relation of the form (2.1.50'), as for the distribution of velocities, and starting
from the relation (5.3.15), we get a relation of the form
Kinematics
343
1
1, 1, 1, 1, 1, 1,
111
nnn
tt CC
ii n ii n ii n
iii
−
++ +
===
++ ++ +
∑∑∑
aa aa aa
11, 11,
1
n
iii n
i
PO PO
++
=
+×+×+
∑
J
JJJJJG JJJJG
ωω
2
21,12,1
1
()
n
ii ii
i
PO
−
++++
=
×
×=
∑
J
JJJJJG
0ωω ;
(5.3.27)
thus, the formulae (5.3.26), (5.3.27) lead also to the static-kinematic analogy for the
sliding vectors of the nature of angular accelerations, where the relative accelerations,
the accelerations of transport and the accelerations of Coriolis play the rôle of moments
of those vectors.
Analogous results can be obtained starting from the relation (5.3.19) too.
We consider also a mechanical system made up by three rigid solids
i
S ,
j
S and
k
S , which have a plane-parallel motion. The rigid solid
i
S has a motion of rotation
with respect to the rigid solid
j
S about an instantaneous axis of rotation, normal to the
plane of motion at the instantaneous centre of rotation
ij
I , with an angular velocity
ij
ω ; analogously, one introduce the instantaneous centres of rotation
j
k
I and
ki
I , as
well as the corresponding angular velocities
j
k
ω
and
ki
ω
. Taking into account the
second relation (5.3.22'), there results that the three parallel vectors are also coplanar, so
that one may state
Theorem 5.3.11 (theorem of the three instantaneous centres of rotation). If a
mechanical system made up by three rigid solids
i
S ,
j
S and
k
S has a plane-parallel
motion, then the three instantaneous centres of rotation
ij
I ,
j
k
I and
ki
I
corresponding
to their relative motions are collinear.
We notice that
ij ji
II≡ , hence the instantaneous centre of rotation of the rigid solid
i
S with respect to the rigid solid
j
S
coincides with the instantaneous centre of
rotation of the rigid solid
j
S with respect to the rigid solid
i
S .
3.3.2 Kinematic chains. Mechanisms
The rigid solids which constitute a system of rigid solids are called elements; one of
those elements may be considered fixed, the other elements being – in general –
movable. The link which restricts the motion of an element with respect to another one
is called kinematic couple relative to the two elements; one may say also that this is the
possibility to transmit the motion from one element to another one. Among the
kinematic couples we mention: the articulation (it allows the rotations), the coulisse or
the slideway (it allows the displacement in a given direction) and the simple support (it
does not allow displacement in a given direction). An element of a kinematic couple is
considered fixed, studying – in fact – the relative motion of the second element with
respect to the first one. The conditions of linkage (the restrictions of the relative
motion) diminish the number of degrees of freedom of the free element (which is six).
We denote by
c the number of the conditions of linkage; if 0c
=
, then the elements
are free one with respect to the other, while if
6c
=
, then the two elements are built in
one into the other (rigid constraint). Hence
15c
≤
≤ ; if N is the number of degrees
MECHANICAL SYSTEMS, CLASSICAL MODELS
344
of freedom which remain, then we have
6cN
=
− . We may thus classify (after
Malyshev) the kinematic couples in five classes, after the number of the conditions of
linkage. We mention thus the plane-sphere and the plane-plane couple (of class I and
class II, respectively), the spherical and the plane couple (of class III), the annular and
the cylindrical couple (of class IV), the couple of rotation, of translation and the helical
couple (of class V); for instance, the plane-sphere couple allows two translations and
three rotations, while the cylindrical couple allows only a translation and a rotation. If
the relative motion of the two elements is a plane-parallel motion, then we have to do
with a plane couple; otherwise, the couple is a space one. In another classification, we
have: inferior kinematic couples, if the contact zone is a surface, and superior kinematic
couples, if the contact zone is a line or a point.
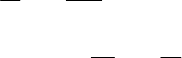
A system of rigid solids (elements) linked by kinematic couples, which allow the
motion from one element to the other, by successive transformations, is called a
kinematic chain. If there is at least a singular element, which belongs to only one
kinematic couple, then the kinematic chain is called open (Fig.5.30,a); otherwise (if
each element of it belongs at least to two kinematic couples), the kinematic chain is
called closed (Fig.5.30,b). A kinematic chain is simple if each element of it belongs at
the most to two kinematic couples (Fig.5.30). Otherwise, the kinematic chains are
Figure 5.30. Kinematic chains: open (a) and closed (b).
complex, having at least an element involved in more than two kinematic couples; these
chains may be open or closed too (Fig.5.31,a,b). If all the couples are plane, then the
kinematic chain is plane; otherwise, it is spatial. We call basis of the kinematic
Figure 5.31. Complex kinematic chains: open (a) and closed (b).
chain an element of it which is considered fixed; the other elements are leading elements (if
they induce the motion coming from the exterior to the other elements) or followers
(if they receive the motion from the first elements). A kinematic chain for which at any
Kinematics
345
position of one or several leading elements of it corresponds a unique position for all
the other followers (with respect to the considered basis) is called desmodromous;
otherwise, the kinematic chain is called non-desmodromous. For instance, the
articulated quadrangle of vertices
,,,ABC D and sides ,,,abcd (Fig.5.32), for which
a is the basis, while the element
b
is leading is a desmodromous kinematic chain, the
elements
c and
d
being followers. In analogous conditions, an articulated pentagon,
e.g., is a non-desmodromous kinematic chain.
The number of degrees of freedom of a kinematic chain, constituted of
n elements,
linked by
c
n couples of class c , 1,2,...,5c
=
, is given by
5
1
6
c
c
Nn cn
=
=−
∑
.
(5.3.28)
If one of the elements of the kinematic chain is a basis, then its degree of mobility is
specified by the Somov-Malyshev formula (the structural formula of the kinematic
chains)
5
1
6( 1)
c
c
Mn cn
=
=−−
∑
,
(5.3.28')
the kinematic couples being independent. If there exist
l restrictions of motion (due,
for instance, to some anterior common linkages), then we have
5
1
(6 ) ( )
c
cl
Nlncln
=+
=− − −
∑
,
(5.3.29)
the degree of mobility being given by Dobrovolski’s formula
5
1
(6 )( 1) ( )
c
l
cl
Mln cln
=+
=− −− −
∑
.
(5.3.29')
In the plane case (
3l = ), we get
5
4
32Nnn n
=
−− and
3
3( 1)Mn=−−
4
n
5
2n− , the latter formula being due to Chebyshev.
A closed kinematic chain which has a basis and is subjected to a desmodromous
motion is called a mechanism; the number of its leading elements is – in general – equal
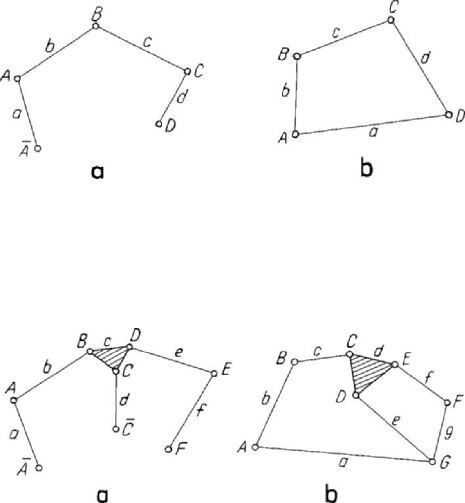
to the number of its degrees of mobility. In the case of the articulated quadrangle
( 4n = ,
4
0n = ,
5
4n = ) (Fig.5.32), Chebyshev’s formula gives 3(4 1)M =−
24 1−⋅ = . In this particular case, we distinguish six centres of rotation, i.e.: four
centres of permanent rotation (the fixed centres of rotation
ba
IA
≡
and
da
ID≡ and
the movable centres of rotation
cb
IB
≡
and
dc
IC
≡
) and two instantaneous centres
of rotation
ca
I and
db
I ; corresponding to the Theorem 5.3.11, we notice that the above
mentioned centres of rotation are three abreast on the four sides of the quadrangle. In
general, a mechanism made up of
n elements has (1)/2nn
−
centres of rotation; if
MECHANICAL SYSTEMS, CLASSICAL MODELS
346
the mechanism is a polygon, then
n centres are permanent (two of them being fixed),
while
(3)/2nn
−
are instantaneous ones.
Figure 5.32. Desmodromous articulated quadrangle.
3.3.3 Applications to the transmission of displacements, velocities and
accelerations
The determination of the kinematic characteristics of a mechanism (i.e., the
positions, the velocities and the accelerations of its points) is of particular importance in
the study of it; the methods of computation used are analytical, graphical, or grapho-
analytical ones.
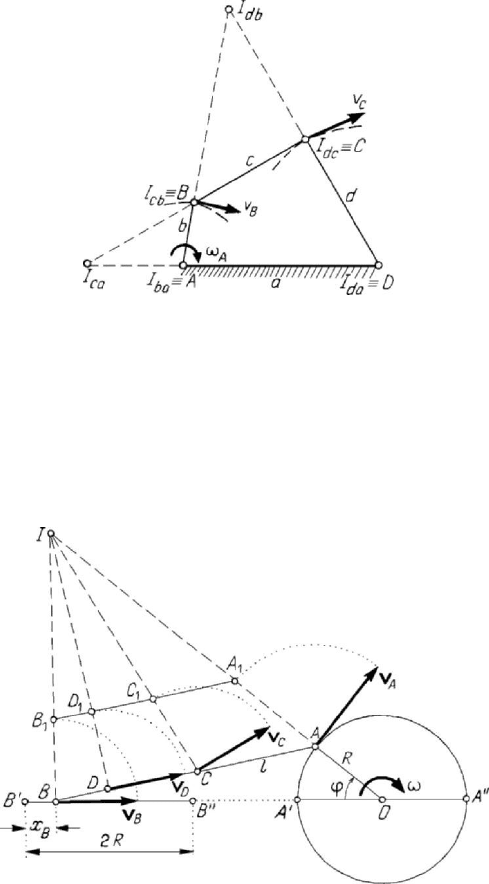
Figure 5.33. Crank and connecting-rod mechanism.
Let be, for instance, the crank and connecting-rod mechanism
BAO (one of the
most usual mechanisms, which transforms a rectilinear motion in a circular one)
(Fig.5.33). the leading element is the crank
AO , articulated at
O
and of length R ,
Kinematics
347
the position of which is specified by the angle
ϕ with respect to the position OA
′
,
corresponding to the dead-point (dead-position); in the latter case, the extremity
B of
the connecting-rod
BA , which glides at B and is of length l , is at the point B
′
.
Taking the point
B
′
as origin for the displacements, the position of the point B at a
given moment will be
(
)
22
(1 cos ) 1 1 sin
B
xBBR lϕλϕ
′
==− +−−
,
R
l
λ
=
.
The ratio
λ being subunitary (in general, 1/3λ
<
), we may use binomial’s formula
for the radical, so that
(
)
2
22 2
(1 cos ) sin 2 sin 1 cos
222
B
R
xR
l
ϕϕ
ϕϕ λ
≅− + = + .
(5.3.30)
Hence, one has the velocity
(
)
sin sin 2 sin (1 cos )
2
B
AA
R
vv v
l
ϕϕ ϕλϕ=+ = +,
A
vRω
=
, ωϕ= .
(5.3.31)
We must have
cos cos 2 0ϕλ ϕ+= for
maxB
v , wherefrom
()
2
1
cos 1 1 8
4
ϕλλ
λ
=−++ ≅, 90ϕ
<
° ,
using the same approximation method as above; consequently,
()
22
2
max
11 1
22
B
AA
vvv
λλ
λ
⎛⎞ ⎛⎞
≅− + ≅+
⎜⎟ ⎜⎟
⎝⎠ ⎝⎠
(5.3.31')
For
1/5λ = we obtain 78 27 47ϕ
′
′′
≅
° and
max
1.02
B
A
vv
≅
.
The acceleration is given by
2
(cos cos 2 ) sin (1 cos )
B
aR Rωϕλϕωϕλϕ=+++
.
(5.3.32)
In case of a constant regime (
constω
=
), it results
(cos cos2 )
B
A
aa ϕλ ϕ=+,
2
A
aRω= .
(5.3.32')
We get
max
(1 )
B
A
aaλ=+ for 0ϕ
=
° and
min
(1 )
B
A
aaλ
=
−− for 180ϕ =°; we
can also have
min
(1 )/ 8
B
A
aaλλ=− + too for cos 1/ 4ϕλ
=
− .
Another analytical method is the method of independent cycles, at the basis of which
stay the formulae (5.3.22) and (5.3.24'), allowing to write two vector equations of
equilibrium for each independent cycle of the considered mechanism; in the case of
n
MECHANICAL SYSTEMS, CLASSICAL MODELS
348
independent cycles, one may write
2n vector equations to determine the velocities
1,n
v ,
1,ii+
v and the angular velocities
1,n
ω
,
1,ii+
ω
,
1,2,..., 1in
=
−
. The formulae
(5.3.26), (5.3.27) lead to an analogous method of computation for the distribution of
accelerations. But the analytical methods are difficult to use in the case of more intricate
mechanisms.
Among the graphical or grapho-analytical methods we mention – first of all – the
method of connecting-rod curves to determine the displacements of the points of
elements of this nature.
To determine the velocities, one can use – sometimes – the method of the
instantaneous centre of rotation; for instance, in the case of the just considered crank
and connecting-rod mechanism (Fig.5.33), the centre
I can be easily obtained, so that
I
OA
IA
ωω= ,
CI
ICωω= ,
(5.3.33)
for an arbitrary point
C of the driving rod. The velocities’ turning down method,
emphasized in Subsec. 2.3.4, allows to determine graphically the magnitude and the
direction of velocities; taking into account Fig.5.19, we may obtain the drawing of
Fig.5.33. The point
D , the foot of the normal from I to the connecting-rod AB , is the
point of minimal magnitude of the velocity, which has the direction of the connecting-
rod, and is its characteristic point. We mention that it is not necessary to obtain
previously the point
I ; that is an advantage of the latter method. But if this point is
specified and a particular scale for the velocities is chosen, so that the magnitude of the
velocity of a point be equal to the corresponding instantaneous radius (in our case
A
vIA= ), then the velocities of all the points will have the moduli equal to the
corresponding instantaneous radii; this is the method of the normal velocities. Euler’s
formula (5.2.3') leads to the method of the relative motion (the method of the vector
equations). As well, the formulae (5.2.4), (5.2.4') stay at the basis of the method of
velocities’ projections; thus, if we know the velocities of the points
A and B , which
correspond to two elements of a mechanism, then we may obtain the projections of the
velocity of a point
C , rigidly linked to each of the points A and B and non-collinear
with these points, on the straight lines
AC and BC , hence obtaining the velocity of
the point
C . The drawing of the velocities’ plane and the similarity theorem (for
velocities) lead to the method of velocities’ polygon for a plane-parallel motion. Using
the theorem of the three instantaneous centres of rotation (see Subsec. 3.3.1), one may
often determine the distribution of the velocities in the case of a plane mechanism (the
method of collinearity of the instantaneous centres of rotation).
To determine the accelerations of an element, we may use the graphical
representation of the accelerations of its points. As in the case of velocities, we mention
the method of relative motion (the method of vector equations), based on the formulae
(5.2.6)-(5.2.6''), the projections’ method, based on the formula (5.2.10), and the method
of accelerations’ polygon, based on the introduction of the accelerations’ plane and on
the similarity theorem (for accelerations), introduced in Subsec. 2.3.4.
We notice that a mechanism realizes a transformation of an input quantity
(displacement, velocity, acceleration) into an output quantity of the same nature; thus,
Kinematics
349
the output quantity will be equal to the input one, amplified by a coefficient, which is a
transmission ratio (or a transfer function), hence
o
i
d
ddλ
=
,
ov
i
vvλ
=
, d being a
displacement and
v a velocity, where the indices o and i stay for output and input,
respectively, while
d
λ ,
v
λ are the corresponding transmission ratios. We mention that,
in the case of accelerations, we cannot speak about a transmission ratio, but only if
const
v
λ = , case in which
ov
i
aaλ
=
with analogous notations; otherwise, the ratio
a
λ of transmission of accelerations depends not only on the position of the leading
element, but also on its velocity and acceleration.
Among the mechanisms which realize these transformations, we mention – first of
all – the mechanisms with articulated levels. One of the simplest mechanisms of this
type is the articulated quadrangle, which may be – in particular – an articulated
parallelogram. The link mechanisms may be with a translation, oscillating or rotation
link; to the first category belongs also the crank and connecting-rod mechanism, just
considered. We mention also the case in which the axle of the link does not pass
through the articulation of the crank, as well as the case of eccentric gears (for which
the ratio
/Rlλ = is very small). Another mechanism of this kind is the shaping
mechanism. The director mechanisms may be used to obtain a rectilinear or a
curvilinear trajectory; they may be reversers (exact director mechanisms) or
approximate mechanisms. The mechanisms with a Cardan joint are based on a Cardan
(universal) coupling.
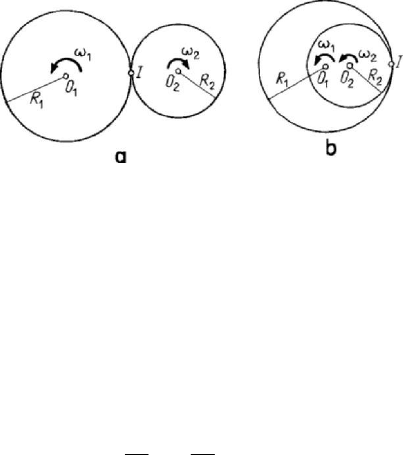
Figure 5.34. Wheel mechanisms with (exterior) (a) or interior (b) wheels.
In the case of wheel mechanisms, one must have in view the relative position of the
axes of rotation and the angular velocities; we mention that the wheels may be exterior
(Fig.5.34,a) (the rotation direction is changed) or interior (Fig.5.34,b) (the rotation
direction is maintained). The transmission may be obtained by friction wheels or by
gear wheels (trains of gears). In the case in which the axes of rotation are parallel
(Fig.5.34), having a rolling without sliding, the velocity of their point of contact (which
is an instantaneous centre of rotation too) is the same, so that the transmission ratio is
given by
12
21
R
R
ω
ω
λ
ω
==±,
(5.3.34)
where one takes the sign + or – as the direction of rotation is maintained or not; if the
motions of rotation are uniform, then we may write