Стрекалов А.В. Математические модели гидравлических систем для управления системами поддержания пластового давления
Подождите немного. Документ загружается.

321
среды, что также оказывает влияние на сопротивления, оказываемые
запорной арматурой.
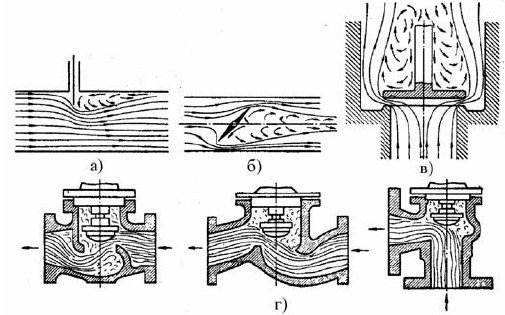
При движении потока сквозь УН также существуют три характер-
ных режима течения: ламинарный, переходный и турбулентный. По-
этому для повышения точности моделирования функции f
УН
(q) необ-
ходимо рассчитывать исходя из зависимости
f(Re)=
ζ
. Ввиду много-
образия управляемых УН (см. главу 3, «Классификация устройств по
управлению потоком») здесь мы не будем останавливаться на расчете
их полных гидравлических характеристик. В целом кривая f
УН
(q) имеет
форму, схожую с кривой полной гидравлической характеристики для
каналов связи, за исключением асимметрии относительно оси давле-
ний и оси расходов.
Самодействующие запорные устройства относятся к элементам
УН и УП. Вид “σ”
устройств для перекрытия и регулирования пара-
метров потока текучей среды представлен широким спектром конст-
рукций [89].
Здесь мы рассмотрим часто используемые в системах ППД обрат-
ные клапаны и редко или почти не используемые регуляторы расхода.
1. Обратный клапан
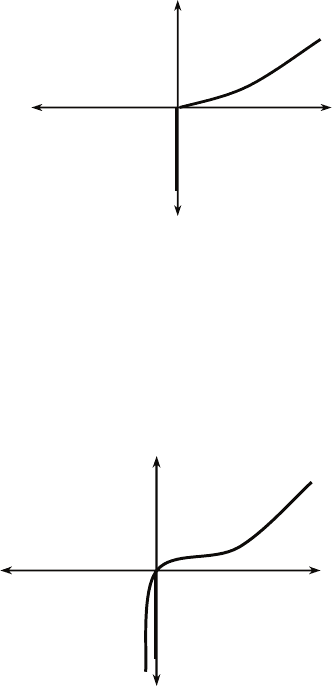
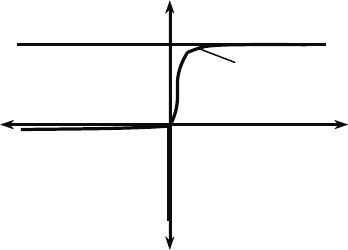
Характер воздействия обратных клапанов на энергию потока мож-
но определить обобщенной формой кривых f
о.к.
(q) (см. рис. 4.66).
Как видно из графика f
о.к.
(q), кривая проходит через начало коорди-
нат, однако, в отличие от управляемых УУ, она имеет ярко выражен-
Рис. 4.65. Линии тока для некоторых запорных устройств
322
Δ
p
q
f
о.к.
(q)
Рис. 4.67. Кривая полной гидравлической
характеристики обратного клапана
ную асимметричность крутизны в сторону оси давлений. В идеальном
случае, когда клапан обеспечивает надежное запирание обратного
(q <0) потока, форма кривой в третьей четверти должна соответство-
вать прямой, совпадающей с осью давлений. Такой вид функции с од-
ной стороны противоречит условию описания замыкающих отноше-
ний, а с другой стороны не отражает практические асп
екты экс-
плуатации обратных клапанов.
Используемые в системе ППД
обратные клапаны типа КОП при
небольших сроках эксплуатации
неполностью запирают обратный
поток в связи с низким эксплуа-
тационным ресурсом. Причем
такая ситуация в принципе не
является аварийной. Если же
конструкция обратного клапана
обеспечивает полное запирание
потока, тогда в зонах отсутствия
потока и в ус
ловиях температуры
окружающей среды ниже Т
кр
(точка замерзания) происходит замерзание трубопроводов, что может
повлечь их порыв. Поэтому для предотвращения таких аварий в затво-
ре клапана иногда даже делают технологическое отверстие, которое
обеспечивает незначительный обратный расход (q < 0) и трубопроводы
не перемерзают.
Таким образом, наиболее
адекватной физическому
смыслу действия обратного
клапана является функция
гидравлической характери-
стики, кривая которой по-
ка
зана на рис. 4.67. Она вы-
ражает собой разность гид-
равлических сопротивлений,
создаваемых потоку при его
прямом и обратном направле-
ниях.
В данном случае функция
является гладкой и строго
Δ
p
q
Рис. 4.66. Кривая гидравлической ха-
рактеристики обратного клапана (иде-
альный случай)
323
возрастающей. Часть кривой в первой четверти отражает гидравличе-
ские сопротивления при прямом движении потока и может быть по-
строена по известному коэффициенту местного сопротивления.
Что касается участка в третьей четверти, то здесь кривая отражает
скорее не количественный, а качественный характер воздействия об-
ратного клапана, т.е. сопротивление в технологическом отверстии. В
иде
альном случае, когда обратный клапан полностью перекрывает
поток коэффициент местного сопротивления при q < 0
ζ→
∞, при этом
кривая вырождается в прямую, совпадающую с осью давлений, одна-
ко, не теряющую связь между q и Δp при бесконечно малых изменени-
ях – dq.
Для практического использования функции f
о.к.
(q) в МТГС кривую
в третьей четверти можно получить, задав коэффициент
ζ
настолько
большим, насколько этого требует точность и позволяют величины h,
H (см. раздел 4.4), подставляемые вместо dq
i
при нахождении частных
производных при линеаризации функций f
.
(q). Величина
ζ
при q < 0
должна быть тем больше, чем выше интервал разброса расходов.
2.Регулятор расхода жидкости
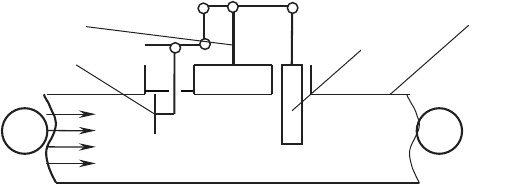
На рис. 4.67/1 показан общий принцип действия регуляторов рас-
хода. Он состоит из корпуса – 1 с заключенной в нем запирающей па-
рой – 2 (активный + пассивный элементы), приводной части – 3 и «дат-
чика» – 4, необходимого для связи между состоянием части – 2 и регу-
лируемым гидравлическим параметром, например расходом жидкости.
В зависимости от расхода и ск
орости потока на датчик – 4 оказывается
различное воздействие, которое регистрируется, и вырабатывается
некоторое воздействие приводной части – 3 на запирающую пару – 2.
Схема воздействия на затвор с помощью датчика – 4 и приводной
части – 3 настроена так, чтобы с помощью пары – 2 поддерживать но-
минальный расход посредством воздействия на поток в регуляторе и
ТГ
С в целом.
P
1
P
2
1
2
3
4
Рис. 4.67/1. Принципиальная схема регулятора расхода
324
Как видно из схемы, действие данного устройства относится к из-
бирательному дросселированию потока. Избирательность заключается
в том, что дросселирование потока происходит только при превыше-
нии расхода текучей среды выше установленного значения при пря-
мом направлении потока. Что касается энергетического воздействия на
обратный поток, то оно является побочным, т.е. конструкцией не уч
и-
тывается, и в зависимости от особенностей устройства может быть
большим или меньшим.
При обратном потоке
регулятор расхода будет
оказывать отрицательное
энергетическое действие,
связанное с неизбежным
для таких УП несовер-
шенством конструкции.
В нормальном режиме
работы, т.е. при прямом
направлении потока с
расходом q<Q
р
, регуля-
тор также не будет ока-
зывать целенаправленно-
го действия на энергию потока, т.е. зависимость перепада давления от
расхода будет близка к прямой, параллельной оси расходов. При росте
значения расхода выше Q
р
датчик – 4 и привод – 3 приводят в движе-
ние затвор, тем самым создавая гидравлическое сопротивление потоку.
Для адекватного учета действия таких устройств на ТГС необходи-
мо рассчитывать КПР с учетом изменения коэффициента местного
сопротивления запирающей пары – 2 в зависимости от расхода жидко-
сти, установившегося на текущее состояние регулятора (см. раздел 4.3
«Динамическая мод
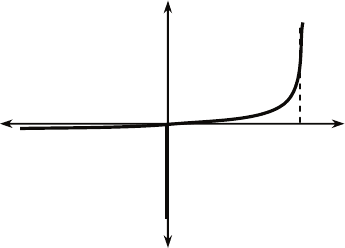
ель с распределенными параметрами»). Однако,
как отмечалось, модели регуляторов расхода и давления можно учесть
с некоторым допущением в виде постоянной гидравлической характе-
ристики f
р.р.
(q): зависимость перепада давления от расхода, установив-
шегося в регуляторе, будет выглядеть как кривая с крутизной к оси
давления (4.67/2).
Кривая такого замыкающего отношения для регуляторов расхода
будет состоять из трех частей. Первая часть символизирует гидравли-
ческие сопротивления при обратном потоке, в этом случае регулятор
не оказывает целенаправленного воздействия на энергию потока те
ку-
Δ
p
q
f
р.р.
(q)
Q
р
Рис. 4.67/2. Кривая полной гидравлической
характеристики регулятора расхода
325
чей среды, а сопротивление вызвано его конструкцией. Вторая часть
также отражает отрицательное нецеленаправленное воздействие на
энергию потока при его прямом направлении, которое также вызвано
несовершенством конструкции. Третья часть кривой показывает ак-
тивное (целенаправленное) воздействие на поток, вызванное его дрос-
селированием, посредством перемещения запирающего элемента. Как
видно из графика, активное отрицательное воздействие на эн
ергию
потока происходит после достижения значения регулируемого расхода
Q
р
. Естественно, до того, как это значение достигнуто воздействие на
поток не будет иметь желаемого результата.
На рис. 4.67/2 показана кривая Δp=f
р.р.
(q) полной характеристики
регулятора расхода. Как видно из кривой, активное воздействие на
поток данный УП осуществляет в зоне q >Q
р
, а при снижении расхода,
даже при полном открытии затвора, регулятор не в состоянии обеспе-
чить установленное значение Q
Р
. Регулятор расхода в ТГС не может
обеспечить точный расход Q
р
, однако, с определенной степенью точ-
ности способен его удержать при достаточном давлении на входе по-
тока. Такая форма кривой f
р.р
(q) необходима только для моделирования
регуляторов расхода в рамках модели установившегося течения: кру-
тизна участка после Q
Р
определяет точность и качество регулирования
расхода, но не отражает характер воздействия регуляторов при неуста-
новившемся течении. Для наиболее приближенного к реальности мо-
делирования в дифференциальной форме с учетом неустановившихся
процессов в ТГС (гидроудары, гидроволны и т.п.) оценка влияния ре-
гуляторов расхода и давления становится по настоящему адекватной
их физическому действию. Одна
ко, ограничения рассматриваемой мо-
дели позволяют наиболее адекватно учесть работу различных гидрав-
лических регуляторов только при использовании «динамической мо-
дели».
Такие допущения допустимы с точки зрения точности желаемых
результатов и снимают отягощение модели, обусловленное сложно
извлекаемыми на практике исходными данными.
Существует еще ряд специфических самодействующих устройств,
осуществляющих регулирование давления и рас
хода текучей среды,
которые могут быть учтены в модели установившегося течения с рас-
ширением ее до динамической или без. Например, регуляторы давле-
ния могут быть смоделированы только в динамической модели.
Регуляторы постоянного перепада давления могут быть смоделиро-
ваны в рамках установившегося течения посредством задания полной
характеристики. В идеальном случае это прямая, па
раллельная оси
326
Δ
p
q
f
р.
пд.
.
(q)
Δ
p
р
a)
б)
Рис. 4.68. Полная гидравлическая характери-
стика регулятора постоянного перепада дав-
ления:
а – идеальный случай; б – реальный
случай, функция f
р
.пд.
(q) в МТГС
расходов и пересекающая ось давлений в соответствующей регули-
руемому перепаду точке (см. рис. 4.68).
Сопоставление реальной и идеальной характеристик регулятора
постоянного перепада давления аналогично регуляторам расхода, т.е.
регулятор постоянного перепада не может адекватно работать при
q < 0, а асимптотический участок достигается относительно расхода не
мгновенно.
В предлагаемой модели
в отличие от сущес-
тв
ующих ранее, для систем
водоснабжения, газо- и
нефтесбора регуляторы
расхода и перепада дав-
ления, а также насосы
моделируются наряду с
другими известными объ-
ектами ТГС. В раз-
работанных ранее моделях
насосные агрегаты пред-
ставлялись в виде актив-
ного напора, не зависящего
от величины расхода, а
источники и приемники
жидкости задавались по-
ст
оянными величинами +/–Q. Тем самым математические модели пре-
терпевали существенные изменения, удаляющие их от особенностей
системной взаимосвязи между объектами.
Из приведенного материала ясно, что прежние варианты моделиро-
вания не отражают реальной картины функционирования гидравличе-
ских элементов и соответственно ТГС в целом. Особенно это касается
АСГ, НТС, УУ. Что касается различного род
а регуляторов, то здесь
стоит отметить, что пока они используются редко или почти не ис-
пользуются в системах ППД Западной Сибири, однако, их применение
уже назрело проблемами регулирования приемистостей и давления
нагнетания в системах заводнения. Применение регуляторов расхода и
давления решает множество задач управления в системах ППД. Но, к
сожалению, эксплуатационные по
казатели существующих регуляторов
далеки от совершенства, а их техническо-эксплуатационные показате-
327
ли далеко не идеальны и препятствуют их применению в жестких ус-
ловиях эксплуатации систем ППД.
Для гидросистем сложной структуры, представленной сетью водо-
проводов, множеством насосных агрегатов, трубопроводной арматуры
и скважин, актуальной является задача оптимального управления ком-
плексным или частными гидравлическими параметрами (давлениями и
расходами жидкости). Суть известных способов решения данной зада-
чи, в бо
льшинстве гидросистем нефтяных промыслов, сводится к
варьированию технических показателей гидросистемы таким образом,
чтобы обеспечить заданные технологией гидравлические параметры в
наиболее ответственных участках гидросистемы. На примере гидро-
систем поддержания пластового давления (ППД) это режимы закачки
в каждой скважине нагнетательного фонда.
Наиболее оптимальным следует считать процесс автоматического
управления гидросистемами, так ка
к иные способы во многом опира-
ются на сложные расчеты, рассматриваемые здесь, или умственный
аппарат человека, что отягощает задачу «человеческим фактором».
Здесь мы коснемся лишь некоторых аспектов автоматического управ-
ления режимами гидросистемы путем использования гидравлических
регуляторов.
В качестве устройств по изменению параметров потока в большин-
стве гидросистем применяются штуцеры, диафрагмы, клапанная и зо-
ло
тниковая запорная арматура, необходимые для создания дополни-
тельного гидравлического сопротивления на определенных участках
схемы. Их применение позволяет управлять потокораспределением
таким образом, чтобы обеспечить определенные установившиеся гид-
равлические параметры в заданных объектах системы, тем самым до-
биться технологических целей гидросистемы.
Рассмотрим предлагаемую технику и технологию автоматического
управления гидравлическими параметрами г
идросистем ППД.
Штуцеры и дросселирующая трубопроводная арматура в системах
ППД устанавливаются как на блоках гребенки при лучевой схеме, так
и непосредственно на скважинах при кольцевой или смешанной схеме
и в дополнение также непосредственно на кустовой насосной станции
(КНС) (в виде запорной арматуры золотникового подкласса – ”
А”).
Данные устройства, с одной стороны, служат для установления задан-
ного расхода жидкости (для нагнетательных скважин), а с другой, для
стабилизации давления (для КНС и устья нагнетательной скважины).
С точки зрения срока эксплуатации и стабильности воздействия на
гидросистему штуцеры, изготовленные из керамики, являются наибо-
328
лее эффективными, однако, их использование при автоматическом
управлении невозможно. В качестве элемента – 2 (см. рис. 4.67/1) для
автоматического управления гидравлическими параметрами предлага-
ется использовать УУ типа “
I” подкласса “В” вида “τ” (управляемые
УУ с нетелескопическим движением затвора клапанного подкласса).
Рассмотрим основные теоретические положения влияния техниче-
ских показателей УУ такого типа на гидравлические параметры гидро-
систем.
Основная проблема управления гидросистемой заключается в сле-
дующем: при изменении технического показателя в одном объекте
(запорная арматура, насосы, скважины и т.п.) влечет изменение ги
д-
равлических параметров во всех объектах гидросистемы [148].
Для описания закона управления гидравлическими параметрами в
гидросистемах необходимо на уровне теории выявить характер воз-
действия на гидросистему отдельных объектов.
На первой стадии необходимо оценить взаимосвязь между степе-
нью дросселирования в трубопроводной арматуре и расходом или дав-
лением жидкости в ней же. Это необходимо дл
я того, чтобы понять
характер влияния технического состояния дросселирующей арматуры
(например, положения запирающего элемента) на режим течения жид-
кости (расход) в данной армату-
ре.
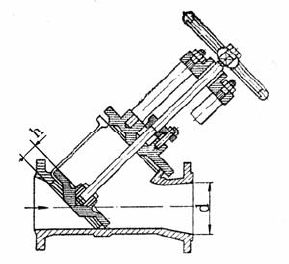
Рассматриваемым фактором
внутреннего состояния регулято-
ра будет положение затвора – h
над седлом, а постоянным фак-
тором диаметр проходного сече-
ния – d. Рассмотрим влияние ЗА
– УУ
IBτО2
(рис. 4.69) на ТГС.
Затвор (активный элемент) в
виде тарели или конуса, переме-
щающегося возвратно-поступа-
тельно параллельно или под уг-
лом к оси потока ТС в корпусе
арматуры.
В клапанных УУ между телами активного и пассивного элементов
в переходные процессы трение отсутствует, а при максимально откры-
том сечении потока рабочие поверхности ак
тивного элемента находят-
ся под воздействием текучей среды.
Рис. 4.69. Типовая клапанная
запорная арматура
329
Рассмотрим степень влияния данного устройства на энергию пото-
ка проходящей сквозь него жидкости.
Известен ряд исследований, показывающих зависимость перепада
давления (между входом и выходом данного устройства), от высоты
затвора над седлом и диаметра проходного сечения –
)d,h,q(PPp
РР
f
выхвх
=−=Δ
. Здесь такие зависимости рассматриваются
как аппроксимирующие экспериментальные данные, полученные при
пропускании сквозь данную арматуру воды. Приведем две из них –
()
()
2
2
8
dh
|q|qAd,h,qf
РР
π
ρ
⋅⋅=
,
где А = 0.51.
()
()
2
2
2
2
2
8
1408072
d
q
h
d
.
h
d
..d,h,qf
РР
π
ρ
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+−=
,
где
ρ
– плотность жидкости, кг/м
3
;
q – расход жидкости, м
3
/с;
h – высота затвора над седлом, м;
d – диаметр поперечного сечения, м.
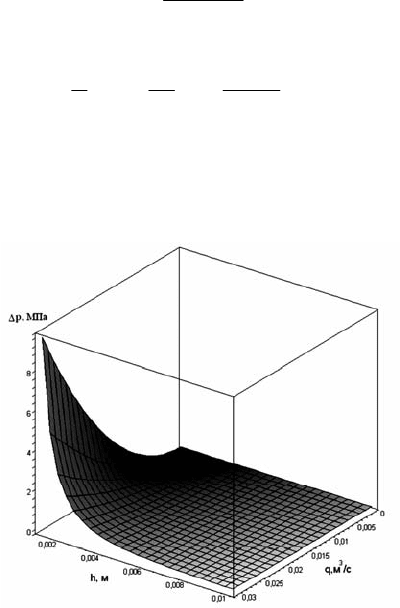
Рассмотрим графики зависимости по формуле (4.118) при d = 0.1 м,
1000=
ρ
кг/м
3
.
Как видно из рис.
4.70, зависимость пе-
репада давления от
расхода жидкости но-
сит квадратичный, а от
высоты затвора над
седлом суб-гипербо-
лический характер.
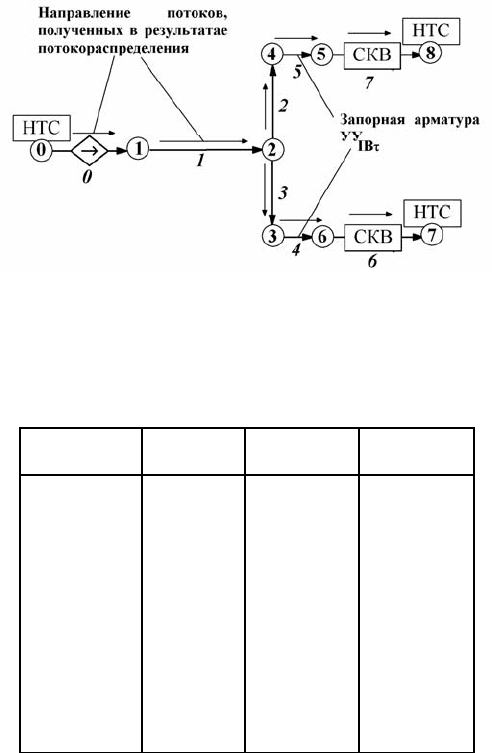
Рассмотрим влия-
ние фактора h данной
запорной арматуры,
стоящей в гидросисте-
ме, показанной на рис.
4.71, на расход жидко-
сти в этой арматуре,
т.е. в звеньях – 4 и 5.
Дл
я этого проведем
вычислительные экс-
(4.117)
(4.118)
Рис. 4.70. Поверхность зависимости
Δ
p=P
вх
– P
вых
=f
РР
(q, h)
330
перименты, воспользовавшись описанной ранее моделью (алгоритм
«АПУН»).
В табл. 4.4 табулированы полученные значения, а на рис. 4.72 по-
казан график кривой, описывающей зависимость расхода в звене 4 от
фактора h одной установленных запорных арматур при d = const.
Таблица 4.4. Зависимость расхода в запорной
арматуре и давления на ее концах от положения
затвора
h
4
, м q
4
, м
3
/сут P
3
, кгс/см
2
P
6
, кгс/см
2
0.0000001
0.00001
0.00005
0.0001
0.00015
0.0002
0.00035
0.0005
0.0006
0.0009
0.002
0.1
1.2
4.1
63.3
174
259.3
314.9
390.5
416.4
424.9
436.1
443.5
445
222.9
222.9
222.4
221.4
220.63
220.1
219.36
219.1
219.02
218.9
218.83
218.82
15.54
16.6
43.6
94.3
133.34
158.8
193.51
205.45
209.34
214.53
217.98
218.81
Рис. 4.71. Пример гидросистемы ППД с установленной на двух
ветках клапанной дросселирующей арматурой – звенья
4, 5: узлы
7 и 8 – точки входа в заводняемые пласты