Skiadas C.H., Skiadas C. Chaotic Modelling and Simulation. Analysis of Chaotic Models, Attractors and Forms
Подождите немного. Документ загружается.

134 Chaotic Modelling and Simulation
(b) Compare the behaviour of the system to that of the system:
˙x = y
˙y = −sin(x)
(c) In both cases, replace sin(x) with its first-order Taylor approximation,
and examine the resulting systems.
(d) What is the differences when we use the third-order Taylor approxima-
tion for sin(x)?
7. Let b > 0. Find the fixed points of the system
˙x = y
˙y = −bx(x − 1)
and determine the stability of the system at the points.
8. Compute the eigenvalues of the Lorenz model.
9. Consider the system:
˙x = a − (b + 1)x + x
2
y
˙y = bx − x
2
y
(a) Find the equilibrium points of the system.
(b) Determine the system’s stability at these points.
(c) Analyse the special cases when b = 1 and b = −1.
10. Show that when c − ab > 0, equation (6.12) has at least one positive root.
11. Determine if the equilibrium points M
+
, M
−
for the Lorenz model, given by
equation (6.19), are stable.
12. Explain the butterfly effect.

Chapter 7
Non-Chaotic Systems
In this chapter we discuss various aspects of non-chaotic systems, that will be helpful
in analysing other, more complex, systems. In section 7.1 we define conservative and
Hamiltonian systems, while in section 7.2 we give a brief account of linear systems
of differential equations, and the qualitative behaviour of their solutions near the
equilibrium point. These are models for the local behaviour of more complicated
systems near their equilibrium points.
In the remaining sections, we look at a number of interesting conservative systems.
7.1 Conservative Systems
In this section we consider two-dimensional conservative systems, that is, systems
that have a non-trivial first integral of motion. For a system
˙x = F(x, y, t)
˙y = G(x, y, t)
(7.1)
A first integral of motion is a function f (x, y), of x and y, that is independent of time.
As a consequence:
d
dt
f (x, y) = ˙x
∂ f
∂x
+ ˙y
∂ f
∂y
= 0 (7.2)
There is a direct connection between the level curves of the first integral and the
trajectories of the system: If f is a first integral of the system (7.1), then f is constant
on every trajectory of the system. Thus, every trajectory is part of some level curve
of f , determined by the value of f at the initial conditions (x
0
, y
0
). Hence, each level
curve of f is a union of trajectories.
The first integral derives its name from the usual method of computing it, by direct
integration of the differential equation:
dy
dx
=
G
F
(7.3)
This follows from (7.2), as follows. We consider a particular level curve of f ,
f (x, y) = c, and consequently we think of f as an implicit equation for y as a function
135
136 Chaotic Modelling and Simulation
of x. In that case, we have
∂ f
∂x
+
∂ f
∂y
dy
dx
= 0
which gives us:
d
dt
f (x, y) = ˙x
∂ f
∂x
+ ˙y
∂ f
∂y
= −˙x
dy
dx
∂ f
∂y
+ ˙y
∂ f
∂y
=
∂ f
∂y
−˙x
dy
dx
+ ˙y
!
(7.4)
Equating the last term to zero, and using equation (7.1), we end up with equa-
tion (7.3). The value of the integration parameter is directly related to the level
of the curve.
Since F, G in general depend on t, this integral may not be independent of t. How-
ever, in the case where F, G are independent of the time t, integration of (7.3) will
result in a first integral of motion for the system. We will examine a number of
particular such systems in this chapter.
Before we proceed, let us elaborate a bit more on the equations. As we saw
in (7.2), the first integral of motion, f (x, y), and consequently the implicit equations
for the trajectories of the system, are determined by the equation:
F
∂ f
∂x
+ G
∂ f
∂y
= 0 (7.5)
Note that this equation will remain true if F, G are both multiplied by the same
function of x, y. To see this geometrically, notice that the trajectories are determined
completely by the direction of their tangent vector at any point, and this direction is
that of the vector ( ˙x, ˙y) = (F, G). Therefore, multiplying both F, G with the same
factor has no effect on this direction.
This means that there is a family of conservative systems sharing the same first in-
tegral of motion. From all these systems, there is one that stands out. Note that (7.5)
can be rewritten as:
F
∂ f
∂y
= −
G
∂ f
∂x
Rescaling F, G amounts to selecting a value for this ratio, so a natural choice would
be to set it to 1, in which case F, G, and hence the solutions of the system, are
completely determined from f by:
F =
∂ f
∂y
and G = −
∂ f
∂x
(7.6)
In this case, we will call f the Hamiltonian of the system, and we will call the
system a Hamiltonian system. All the systems we will consider in this section are
Hamiltonian.
Equations (7.6) provide a necessary condition for the Hamiltonian to exist, since
they imply that:
∂F
∂x
= −
∂G
∂y
=
∂
2
H
∂x∂y
Non-Chaotic Systems 137
In the case where F, G are independent of t, this is also sufficient, and the Hamilto-
nian can be computed by simply solving the system (7.6).
Hamiltonian systems play a central role in Hamiltonian Mechanics. The equations
of motion of Hamiltonian systems can be completely described using their Hamilto-
nian, from equations (7.5) and (7.6).
7.1.1 The simplest conservative system
The simplest conservative system is given by
˙x = y
˙y = −x
(7.7)
The corresponding differential equation for the integral of motion is
dy
dx
= −
x
y
(7.8)
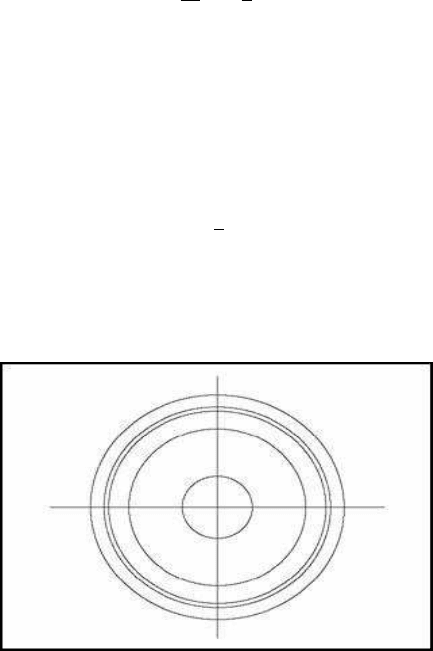
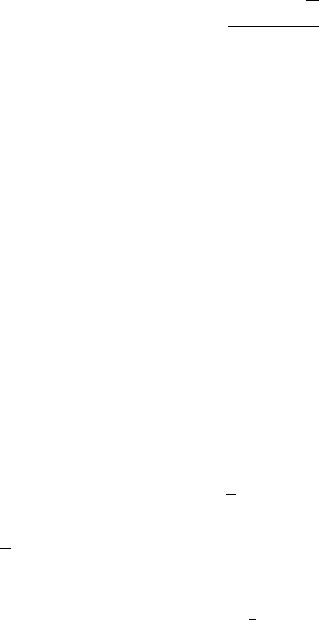
The solutions to (7.8) are concentric circles
x
2
+ y
2
= h
where h is a positive constant (Figure 7.1). Consequently, the system is conservative.
Its first integral of motion is:
H(x, y) =
1
2
x
2
+ y
2
The level curves are therefore concentric circles, whose radius is determined by the
initial conditions (x
0
, y
0
).
FIGURE 7.1: The simplest conservative system
138 Chaotic Modelling and Simulation
Note that this is indeed a Hamiltonian system, as:
∂H
∂y
= y = ˙x and −
∂H
∂x
= −x = ˙y
We could have come to the same conclusions by solving the system:
∂H
∂x
= ˙x = y
∂H
∂y
= −˙y = x
Integrating the first equation would yield H(x, y) =
1
2
y
2
+ c(x), and substituting into
the second equation would yield c(x) =
1
2
x
2
+ c.
7.1.2 Equilibrium points in Hamiltonian systems
Before we proceed to more complicated examples, it is worthwhile discussing
the behaviour of a system in a neighbourhood of an equilibrium point. Equilibrium
points are found by setting ˙x and ˙y to 0. In the case of a Hamiltonian system, this
corresponds to
∂H
∂x
=
∂H
∂y
= 0
So the equilibrium points of a Hamiltonian system are precisely the critical points of
the Hamiltonian H. For instance, in the system 7.7 the origin is the only equilibrium
point.
If (x
0
, y
0
) is an equilibrium point, then the Taylor expansion of H around (x
0
, y
0
)
will be:
H(x, y) = H(x
0
, y
0
) +
1
2
h
xx
(x − x
0
)
2
+ h
xy
(x − x
0
)(y −y
0
) +
1
2
h
yy
(y −y
0
)
2
+ ··· (7.9)
where
h
xx
=
∂
2
H
∂x
2
x
0
, y
0
, h
xy
=
∂
2
H
∂x∂y
x
0
, y
0
, h
yy
=
∂
2
H
∂y
2
x
0
, y
0
are the second-order partial derivatives of H at (x
0
, y
0
), and the terms ignored are
of higher order in x − x
0
, y − y
0
. If, for simplicity, we change coordinates so that
(x
0
, y
0
) = (0, 0), and we further denote h
0
= H(x
0
, y
0
) = H(0, 0), then the equa-
tion (7.9) becomes:
H(x, y) = h
0
+
1
2
h
xx
x
2
+ h
xy
xy +
1
2
h
yy
y
2
+ ···
Non-Chaotic Systems 139
So, the behaviour of the trajectories of the system, i.e. of the level curves of H, near
the equilibrium point, is determined by the quadratic form:
1
1
2
h
xx
x
2
+ 2h
xy
xy + h
yy
y
2
(7.10)
Depending on the number of real roots of the characteristic polynomial
2
k(X) =
h
xx
+ 2h
xy
X + h
yy
X
2
, these trajectories may look elliptic, hyperbolic, or parabolic.
3
If k(X) has no roots, then the trajectories near the equilibrium point are elliptical,
and the point is a stable equilibrium point. If k(X) has two distinct roots, then the
trajectories are hyperbolas, and their asymptotes are the lines with slopes the two
roots (this will be elaborated further in the next section).
For instance, the system (7.7) has an equilibrium point at (0, 0), whereupon H is
written, locally, as:
1
2
x
2
+
1
2
y
2
In this case, the polynomial in question is 1 + X
2
, which has no real roots. Hence,
the system will exhibit elliptical orbits near (0, 0).
4
7.2 Linear Systems
Near an equilibrium point (we will assume this point is 0, 0), system (7.1) can be
approximated by a linear system:
˙x = ax + by
˙y = cx + dy
(7.11)
where a, b, c and d are real numbers or, in a more general analysis, real functions of
t of a special form.
We will now discuss in greater detail the classical theory of system (7.11). This
system has, as already mentioned, an equilibrium point at (x, y) = (0, 0). We will
1
This quadratic form is the quadratic form associated to the Hessian matrix:
∂
2
H
∂x
2
∂
2
H
∂x∂y
∂
2
H
∂y∂x
∂
2
H
∂y
2
2
This number depends of course on the discriminant of the polynomial, which is the determinant of
the Hessian matrix.
3
That is, in the case that the critical point is non-degenerate, i.e. in the case where the characteristic
polynomial is not identically zero.
4
In this case, of course, the orbits will remain elliptical even away from 0, 0.
140 Chaotic Modelling and Simulation
denote by A the matrix of coefficients:
A =
"
a b
c d
#
The eigenvalues of this matrix are called the eigenvalues of system (7.11), and
they are given by the equation
|
A − λI
|
=
a − λ b
c d − λ
= 0
or, in simpler terms:
λ
2
− (a + d)λ + (ad − bc) = 0
If we note, that a + d and ad − bc are respectively the trace and determinant of A,
we can write the equation for the eigenvalues as:
λ
2
− tr(A)λ + det (A) = 0
The solutions to this are
λ
1,2
=
tr(A) ±
√
∆
2
(7.12)
where, as usual, ∆ denotes the discriminant:
∆ = tr(A)
2
− 4 det(A) (7.13)
Before we proceed to a classification of equilibrium points according to the qual-
itative behaviour of the solutions near these points, we will discuss the effects of
various transformations on the shape of the matrix A.
7.2.1 Transformations on linear systems
We start by considering a simple coordinate rescaling:
u = kx v = k
′
y
(7.14)
The transformed system (7.11) then takes the form
˙u = au + rbv
˙v =
1
r
cu + dv
where r =
k
k
′
. So the matrix of the new system, A
′
, is:
A
′
=
"
a rb
1
r
c d
#

Non-Chaotic Systems 141
The trace and determinant thus remain invariant:
tr(A
′
) = tr(A)
det(A
′
) = det(A)
A more general change of coordinates amounts to the transformation
h
u v
i
= C
h
x y
i
(7.15)
where C is an invertible matrix of constants. The corresponding matrix A
′
is then a
matrix similar to A:
A
′
= CAC
′
Hence, this again keeps the trace and determinant invariant.
Another simple transformation involves time rescaling:
5
u(t) = x(kt) v(t) = y(kt)
(7.16)
System (7.11) then becomes:
˙u = kau + kbv
˙v = kcu + kdv
Thus the matrix of the system becomes
A
′
= kA
and hence
tr(A
′
) = k tr(A)
det(A
′
) = k
2
det(A)
According to (7.12) and (7.13), the eigenvalues are simply rescaled by k.
Finally, the transformation
u(t) = e
−kt
x(t) v(t) = e
−kt
y(t)
(7.17)
results in a system with matrix
A
′
= A − kI
with the corresponding changes this implies to the trace and determinant:
tr(A
′
) = tr(A) − 2k
det(A
′
) = k
2
− k tr(A) + det(A)
Note however, that this transformation does keep the discriminant
∆ = tr(A)
2
− 4 det(A)
invariant, and hence it amounts to a parallel translation of the eigenvalues by −k.
This transformation changes radically the behaviour of solutions near (0, 0), but in a
very controlled way, and we will utilise it in the next section.
5
This does not alter in any essential way the behaviour of solutions near the point (0, 0), provided
k > 0.
142 Chaotic Modelling and Simulation
7.2.2 Qualitative behaviour at equilibrium points
We will now proceed to analyse the qualitative behaviour of solutions near equi-
librium points, using the transformations from section 7.2.1. First off, the sign of
tr A is of paramount importance. Using transformation (7.17), we can always reduce
to the case where tr(A) = 0, i.e. where d = −a, and we will do so for the next couple
of paragraphs. The condition tr(A) = 0 is exactly the condition for system (7.11) to
be conservative. In that case, the system has the first integral:
f (x, y) = cx
2
− 2axy − by
2
We have to distinguish a couple of cases here.
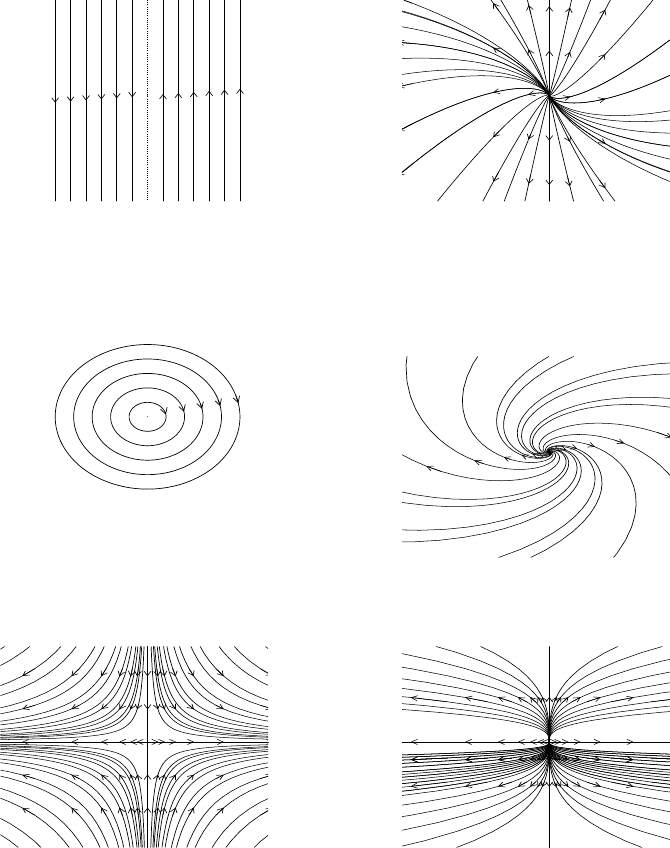
1. ∆ = 0, i.e. the first integral f is degenerate, and there is only one, double,
eigenvalue, namely 0. Up to a change of coordinates, we may assume f (x, y) =
x
2
, i.e. that the linear system is:
˙x = 0
˙y = x
The solutions are then:
x(t) = A
y(t) = At + B
This case is illustrated in Figures 7.2(a) and 7.2(b).
2. ∆ < 0. Then, there are two complex eigenvalues, which, after performing
transformation (7.16), we may assume to be ±i. Then, up to a change of
coordinates, we may assume f (x, y) = x
2
+ y
2
, i.e. that the linear system
is
˙x = −y
˙y = x
The solutions are then:
x(t) = A cos(t) + B sin(t)
y(t) = B cos(t) − A sin(t)
This case is illustrated in Figures 7.2(c) and 7.2(d).
3. ∆ > 0. Then there are two distinct real eigenvalues, which, after performing
tranformation (7.16), we may assume to be ±1. After a change of coordinates,
we may assume that f (x, y) = xy, i.e. that the system is:
˙x = x
˙y = −y
The solutions are then:
x(t) = Ae
t
y(t) = Be
−t
Non-Chaotic Systems 143
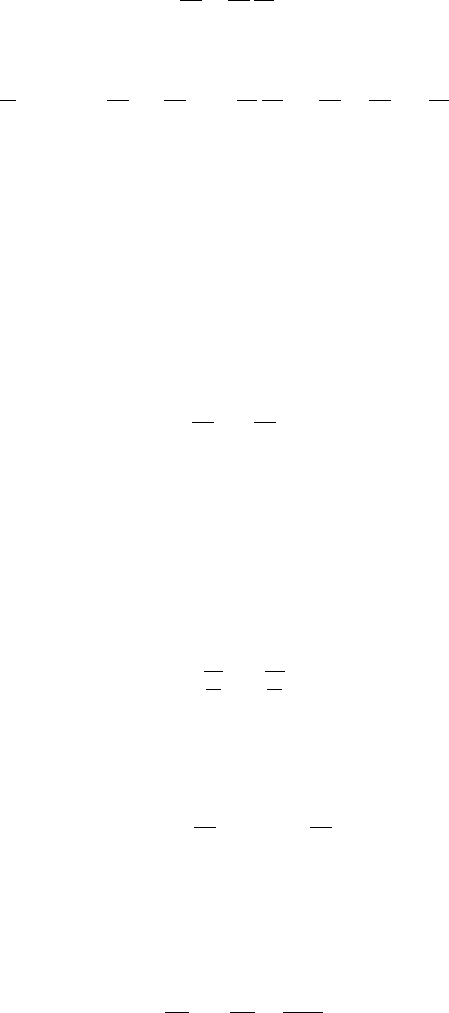
(a) ∆ = 0 , tr(A) = 0 (b) ∆ = 0, tr(A) > 0
(c) Center point, ∆ < 0, tr(A) = 0 (d) Spiral source, ∆ < 0 , tr(A) > 0
(e) Saddle point, ∆ > 0, tr(A) = 0 (f) ∆ > 0 , tr(A) > 0
FIGURE 7.2: Qualitative classification of equilibrium points