Skiadas C.H., Skiadas C. Chaotic Modelling and Simulation. Analysis of Chaotic Models, Attractors and Forms
Подождите немного. Документ загружается.

114 Chaotic Modelling and Simulation
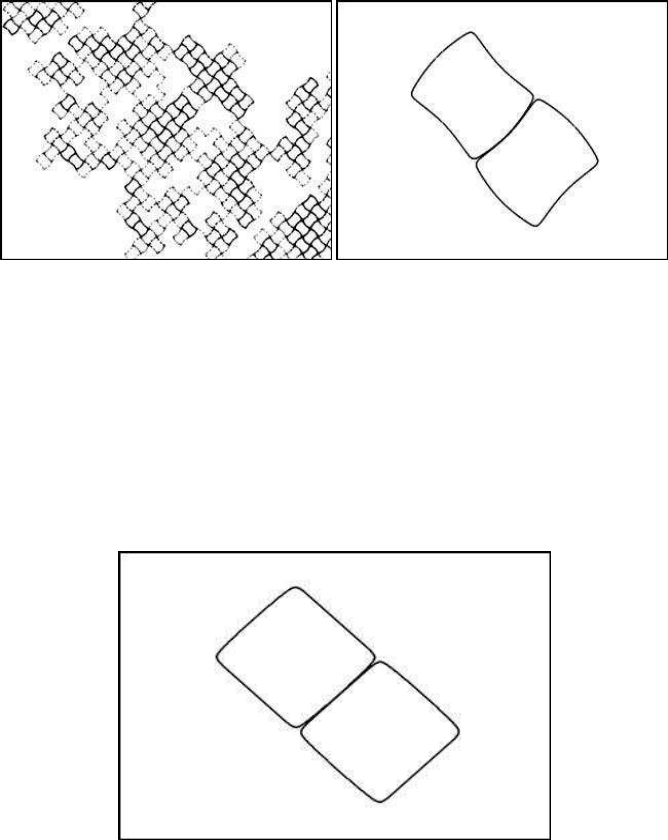
(a) a = 1.2 (b) Close look at the two shapes, a = 0.8
FIGURE 5.19: The sine delay model for b = 1
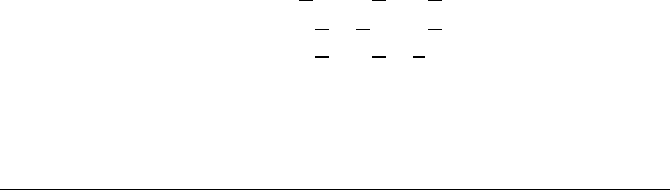
FIGURE 5.20: The sine delay model (a = 0.1)

The H´enon Model 115
Questions and Exercises
1. Verify that the fixed points and period-doubling bifurcations of the H
´
enon map
for b = 1 and b = −1 are as described in section 5.1.
2. Examine the behaviour of the H
´
enon map for b = 3.
3. For each of the maps (5.9), (5.10) and (5.11):
(a) Determine the fixed points and second-order fixed orbits, and their sta-
bility.
(b) Rewrite them as systems of 3 difference equations without delay, and
calculate the Jacobian determinants of these systems.
4. Determine the fixed points of the sine delay model given by equation (5.18)
when b = 1, and their stability. Use this information to explain the carpet-like
forms arising when b = 1 (Figure 5.19(a)).
5. Continuing from the previous question, run simulations with different para-
meter values, and examine whether the carpet-like formations are present, and
how they spread across the plane.
6. Explain why for small b there is a relationship between the maxima and min-
ima of the sine delay model (x
t
, x
t+1
) map and the maxima and minima of the
equation for the fixed points of the map.
7. Estimate the number of maxima and minima of the fixed point equation for the
sine delay model:
f (x) = (1 − b)x − a sin(x)
Hint: Find an equation for those maxima and minima from f
′
(x) = 0, and
estimate the n beyond which f (c) > 0 at the minima.

Chapter 6
Three-Dimensional and
Higher-Dimensional Models
In this chapter, we present a number of higher-dimensional models that exhibit
chaotic behaviour. Before we delve into particular examples, though, a general dis-
cussion of the behaviour of such systems near their equilibrium points is necessary.
6.1 Equilibrium Points and Characteristic Matrices
Let us consider a general autonomous system of the form
˙x = ˙x(x, y, z)
˙y = ˙y(x, y, z)
˙x = ˙z(x, y, z)
(6.1)
and suppose x
0
= (x
0
, y
0
, z
0
) is an equilibrium point for it, i.e. a point where
˙
x
0
= ( ˙x
0
, ˙y
0
, ˙z
0
) = (0, 0, 0).
Consider the matrix:
A =
∂ ˙x
∂x
∂ ˙x
∂y
∂ ˙x
∂z
∂˙y
∂x
∂˙y
∂y
∂˙y
∂z
∂˙z
∂x
∂˙z
∂y
∂˙z
∂z
Then, at a point x = x
0
+ h sufficiently close to x
0
, we can assume, using a first order
Taylor approximation, that
˙
x is given by:
˙
x =
˙
x
0
+ A · h = A · h
Suppose now that the matrix A has a real eigenvalue, say λ
1
, with eigenvector
h
1
. Then, the orbit of a particle placed at x
0
+ δh
1
will move away from x
0
, in the
direction of the vector h
1
, since its position after a short time t would be:
x(t) ≈
(
x
0
+ δh
1
)
+
˙
x · t = x
0
+ (δ + λ
1
t)h
1
.
117
118 Chaotic Modelling and Simulation
So any equilibrium point with a positive eigenvalue will be unstable. To determine
these eigenvalues, we need to compute the roots of the characteristic polynomial
|
A − λI
|
=
∂ ˙x
∂x
− λ
∂ ˙x
∂y
∂ ˙x
∂z
∂˙y
∂x
∂˙y
∂y
− λ
∂˙y
∂z
∂˙z
∂x
∂˙z
∂y
∂˙z
∂z
− λ
The matrix A − λI is called the characteristic matrix of the system.
6.2 The Lotka-Volterra Model
As an illustration of the above theory in a simpler case, let us consider a classical
two-dimensional system, the Lotka-Volterra model, also known as the predator-prey
model. In its simplified form, the Lotka-Volterra model has the form:
˙x = x − xy
˙y = −y + xy
(6.2)
In the terminology of Chapter 7, this is a conservative system with first integral of
motion:
f (x, y) = xye
−x−y
It has two equilibrium points, at (x, y) = (0, 0) and at (x, y) = (1, 1). The characteris-
tic polynomial is given by
−y + 1 − λ −x
y x − 1 − λ
= λ
2
− (x − y)λ + (x + y − 1)
At (x, y) = (0, 0), the characteristic equation is
λ
2
− 1 = 0
and the system has two real eigenvalues λ
1,2
= ±1. The eigenvectors correspond to
the two directions where there are no predators, and where there are no prey. Since
one of these eigenvalues is positive, the system is unstable. At (x, y) = (1, 1), the
characteristic equation is
λ
2
+ 1 = 0
and the system has two imaginary eigenvalues, λ
1,2
= ±i. The system will cycle
around this point.
Using linearization, we see that near (0, 0), the system can be replaced by the
simpler system
˙x = x
˙y = −y

Three-Dimensional and Higher-Dimensional Models 119
whose orbits are the hyperbolas xy = c. Near (1, 1), if we use coordinates (ξ, η) =
(x − 1, y − 1) centred at 1, 1, the system can be replaced by the simpler system
˙
ξ = −η
˙η = ξ
whose orbits are counterclockwise circles ξ
2
+ η
2
= (x − 1)
2
+ (y − 1)
2
= c.
6.3 The Arneodo Model
The simplest three-dimensional chaotic models are based on a system of three
linear differential equations, on which we add a non-linear term. An example of
such a system is the Arneodo model:
˙x = y
˙y = z
˙z = −
z + sy − mx + x
2
(6.3)
where s and m are parameters.
This model was proposed by Arneodo et al. (1979, 1980, 1981a), in their work on
systems that exhibit multiple periodicity and chaos. The Jacobian determinant of the
model is
J = −m + 2x.
There are two stationary (equilibrium) points, the origin (0, 0, 0), and (m, 0, 0).
In Figure 6.1, the (x, y) diagram of the system is shown (s = 3.8 and m = 7.5, the
initial values are (x
0
= 0.5 and y
0
= z
0
= 1). An integration method was used with
integration step d = 0.001.
A slight variation, replacing the last equation in (6.3) with
˙z = −
z + sy − mx + x
3
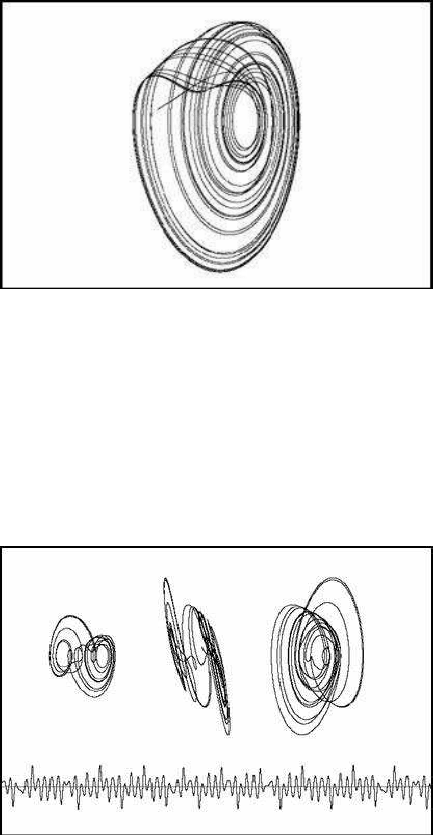
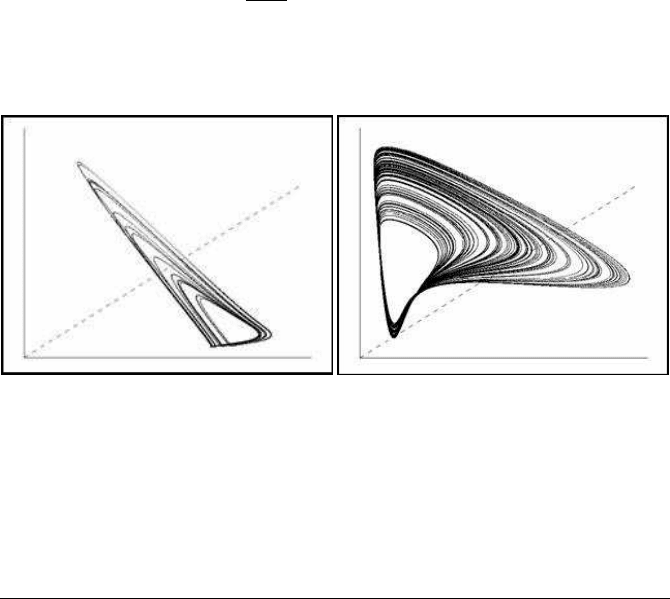
leads to a model with a more stable behaviour. Figure 6.2 shows the projections of
the three-dimensional solution path of this system to the three planes (x, y), (x, z) and
(y, z) respectively. The parameters are as above, except that m = 5. The bottom part
of this figure shows the chaotic oscillations in the (y, t) space.
The resulting paths of this modified system have a somewhat more complicated
form than those of (6.3). There are three stationary points:
( 0, 0, 0)
(
√
m, 0, 0)
(−
√
m, 0, 0)
(6.4)
The Jacobian of the modified system is J = −m + 3x
2
.
120 Chaotic Modelling and Simulation
FIGURE 6.1: The Arneodo model
FIGURE 6.2: A modified Arneodo model
Three-Dimensional and Higher-Dimensional Models 121
6.4 An Autocatalytic Attractor
Autocatalytic reactions often give rise to chaotic phenomena. The representation
of chemical reaction models by mathematical non-linear models is possible and has
been studied extensively (Prigogine and Lefever, 1968; Prigogine et al., 1969; Nico-
lis, 1971; Nicolis and Portnow, 1973; Nicolis and Prigogine, 1977, 1981; Nicolis
et al., 1983). It is more difficult to find a good representation of the numerous in-
termediate stages of a chemical reaction. The number of these stages influences the
complexity of the system, and, consequently, gives rise to a process with the chaotic
behaviour. Non-linear modelling theory suggests that at least one non-linear part
must be present in each reaction cycle in order for chaotic phenomena to appear.
A three-dimensional chaotic model is perhaps the simplest case, representing an
autocatalytic reaction with three stages. Such a model, for appropriate parameter val-
ues, may demonstrate chaotic behaviour, giving rise to a three-dimensional chaotic
attractor. A typical such model is given by the following system:
˙x = k + λz − x y
2
− x
˙y =
xy
2
+ x − y
e
˙z = y − z
(6.5)
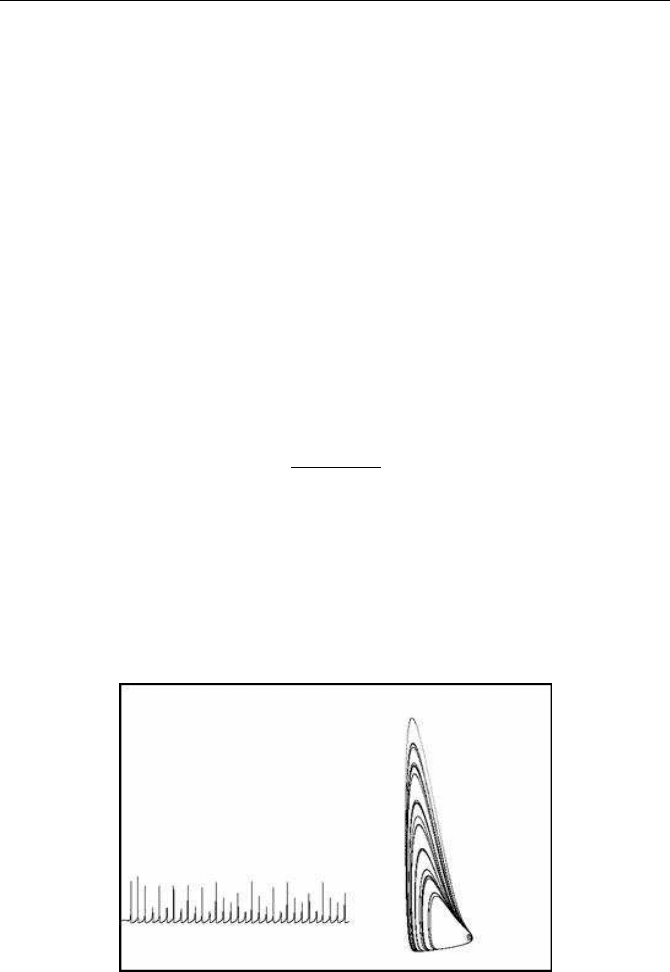
When the parameters of system (6.5) take the values k = 0.7567, λ = 0.3 and e =
0.013, Figure 6.3 arises. On the right side we see the two-dimensional (x, y) phase
portrait, while on the left side we see the temporal variation of chaotic oscillations in
the y direction (i.e. the (t, y) diagram).
FIGURE 6.3: An autocatalytic attractor
122 Chaotic Modelling and Simulation
A three-dimensional view (x, z, y) of the phase portrait of the autocatalytic reac-
tion is presented in Figure 6.4(a). The view from the (y, z, x) coordinate system is
presented in Figure 6.4(b). The parameters in both cases are k = 2.5, m = 0.017 and
e = 0.013, and the integration step is d = 0.0001. In this case the system (6.5) has
been modified slightly, with the first equation replaced by:
˙x =
1
1 + k
+ m
!
(k + z) − xy
2
− x
(a) In the (x, z, y) coordinate system (b) In the (y, z, x) coordinate system
FIGURE 6.4: Three-dimensional views of the autocatalytic model
6.5 A Four-Dimensional Autocatalytic Attractor
The following four-dimensional model expresses a sequence of four chemical au-
tocatalytic reactions:
˙x
1
= x
1
− x
1
x
2
− 0.24x
2
1
+ 200x
4
+ a
˙x
2
= x
1
x
2
− x
2
− 10x
2
x
3
˙x
3
= 0.01 + 10x
2
x
3
− 20x
3
˙x
4
= 0.24x
2
1
− 100x
4
(6.6)
The non-linear character of (6.6) is due to the second order term in x
1
, which
appears in the first and fourth equations, and to the couplings x
1
x
2
in the first and the
Three-Dimensional and Higher-Dimensional Models 123
second equations and x
2
x
3
in the second and third equations. The control parameter,
a, has value −0.12, and the integration step is d = 0.003.
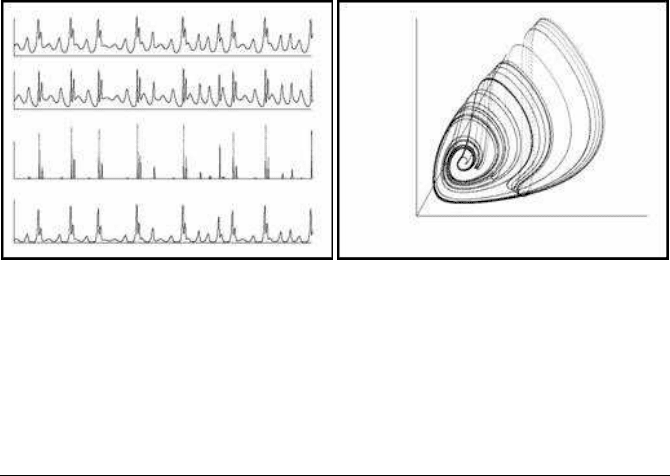
Figure 6.5(a) illustrates, from top to bottom, the (x
1
, t), (x
2
, t), (x
3
, t) and (x
4
, t) di-
agrams. The chaotic behaviour is similar, yet more complicated than in the previous
cases, whereas the time oscillations are of a purely chaotic nature, with several peaks
and intermediate chaotic stages. This is a very good example of chemical oscillations
and the related chaotic waves. Figure 6.5(b) shows the three-dimensional (x
1
, x
2
, x
3
)
diagram representing the chaotic attractor of (6.6).
(a) Temporal chaotic oscillations (b) The (x
1
, x
2
, x
3
) diagram
FIGURE 6.5: A four-dimensional autocatalytic model
6.6 The R¨ossler Model
One of the simplest three-dimensional models is the R¨ossler model (see R
¨
ossler,
1976d):
˙x = −y − z
˙y = x − ez
˙z = f + xz − mz
(6.7)
The model contains a single non-linear term, xz, which enters in the third equation,
and three parameters, e, f and m.
Figure 6.6(a) is a three-dimensional view of the R
¨
ossler model when the para-
meters are: e = 0.2, f = 0.2 and m = 5.7. Figure 6.6(b) shows, from left to right,