Skiadas C.H., Skiadas C. Chaotic Modelling and Simulation. Analysis of Chaotic Models, Attractors and Forms
Подождите немного. Документ загружается.


154 Chaotic Modelling and Simulation
Questions and Exercises
1. Consider the system
˙x = −y
˙y = x(1 − x)
(a) Find its equilibrium points.
(b) Find the eigenvalues and eigenvectors at the equilibrium points, and char-
acterise the points according to their stability.
(c) Linearise the system, and find the type of stability at the equilibrium
points.
(d) Find a first integral of motion for the system.
(e) Draw various trajectories of the system in the (x, y) plane.
(f) Draw the trajectories that pass through equilibrium points.
(g) Find the maximum speed of the flow at the y direction (˙y).
2. Consider the system
˙x = 1 − y
˙y = x + ay
(a) Find the equilibrium points for the system.
(b) Find the characteristic equation at the equilibrium points.
(c) Characterise the equilibrium points for various values of a.
(d) Examine in particular the case a = 2.
3. For each of the following systems, (a) show that it is Hamiltonian, (b) com-
pute the Hamiltonian function, (c) determine the fixed points, and classify
them, and (d) plot, for various values of the parameters, the level curves of the
Hamiltonian, including the curves passing through the fixed points.
(a)
˙x = y(y − b)
˙y = ax
(b)
˙x = y
2
− b
2
˙y = x
(c)
˙x = y
2
− b
2
˙y = x
2
− a
2
4. Show that the system
˙x = 2xy
˙y = x
2
− y
2
is conservative, but not Hamiltonian. Find a system equivalent to it that is
Hamiltonian.

Non-Chaotic Systems 155
5. Show that the system
˙x =
1
x
˙y = −
1
y
is conservative, but not Hamiltonian. Find a system equivalent to it that is
Hamiltonian.
6. Show that each of the transformations described in section 7.2.1 have the indi-
cated effect on the matrix A and its eigenvalues.

Chapter 8
Rotations
In this chapter we examine the effects of introducing affine transformations to mod-
els, in particular the effect of introducing rotation. A wealth of very interesting
models arise from this seemingly simple change.
8.1 Introduction
The location (x
n
, y
n
) of a system is given in parametric form (r
n
, θ
n
) by:
x
n
= r
n
cos(θ
n
)
y
n
= r
n
sin(θ
n
)
(8.1)
where r =
p
x
2
+ y
2
and θ
n
is the rotation angle.
If we assume that transitioning from the n-th state to the n + 1-st state amounts to
a rotation by an angle ∆θ, then the new coordinates would be given by:
x
n+1
= r
n
cos(θ
n
+ ∆θ)
y
n+1
= r
n
sin(θ
n
+ ∆θ)
(8.2)
or after using the familiar trigonometric identities for the sum of two angles:
x
n+1
= r
n
cos(θ
n
) sin(∆θ) − sin(θ
n
) sin(∆θ)
y
n+1
= r
n
cos(θ
n
) sin(∆θ) + sin(θ
n
) cos(∆θ)
(8.3)
Therefore, the effect of rotation can be written directly using the following, which
may be familiar to you already:
x
n+1
= x
n
cos(∆θ) − y
n
sin(∆θ)
y
n+1
= x
n
sin(∆θ) + y
n
cos(∆θ)
(8.4)
When the rotation is followed by a translation equal to a and parallel to the x axis,
then the tranformation (8.4) is replaced by:
x
n+1
= a + x
n
cos(∆θ) − y
n
sin(∆θ)
y
n+1
= x
n
sin(∆θ) + y
n
cos(∆θ)
(8.5)
157

158 Chaotic Modelling and Simulation
We can consider the system (8.5) as a simple system of difference equations. Let us
work out an analogous system of differential equations. The time elapsed between
two successive iterations is ∆t and is usually set to 1. Then, taking into account that
˙x =
dx
dt
≈
∆x
∆t
= x
n
− x
n−1
and similarly for ˙y, we obtain the differential equations:
˙x = a + x
cos(∆θ) − 1
− y sin(∆θ)
˙y = x sin(∆θ) + y
cos(∆θ) − 1
(8.6)
8.2 A Simple R otation-Translation System of Differen-
tial Equations
If the rotation angle is small, ∆θ ≪ 1, the system (8.6), using first order Taylor
approximations for cos and sin, can be simplified to:
˙x = a − y∆θ
˙y = x∆θ
(8.7)
This is a Hamiltonian system, whose first integral of motion can be computed from
the differential equation:
∂y
∂x
=
x∆θ
a − y∆θ
This equation leads to the form:
1
ady = (∆θ)rdr (8.8)
The solution of equation (8.8) depends on the form of the function ∆θ. A reason-
able assumption would be that ∆θ is “radial,” i.e. depends only on the distance r from
the origin, and not of the direction. A standard choice in mechanics, based on the
transverse component of the acceleration, is that the rotational change is inversely
proportional to the square distance, i.e. that:
∆θ ≈
h
1
r
2
Another important case is that of a mass M rotating in a circular orbit under a
central force
f (r) =
MG
r
2
1
We have used here that r
2
= x
2
+ y
2
, and consequently rdr = xdx + ydy.
Rotations 159
where G is the gravity constant. The equations of motion then result in
∆θ ≈
˙
θ =
r
MG
r
3
In this case, equation (8.8) becomes:
ady =
r
MG
r
dr
Its solution is
r =
(ay + h)
2
4MG
where h is an integration constant. This can also be rewritten as
x
2
=
(ay + h)
2
4MG
− y
!
(ay + h)
2
4MG
+ y
!
(8.9)
The fixed point of the system is at
(x, y) =
0,
MG
a
2
at which point the value of h is:
h =
MG
a
The path of the trajectory in the (x, y) plane for this value of h divides the plane in
two segments. When h >
MG
a
, the trajectories diverge and the rotating object heads
off to infinity. When h <
MG
a
the rotating mass moves inside the space bounded by
the above trajectory.
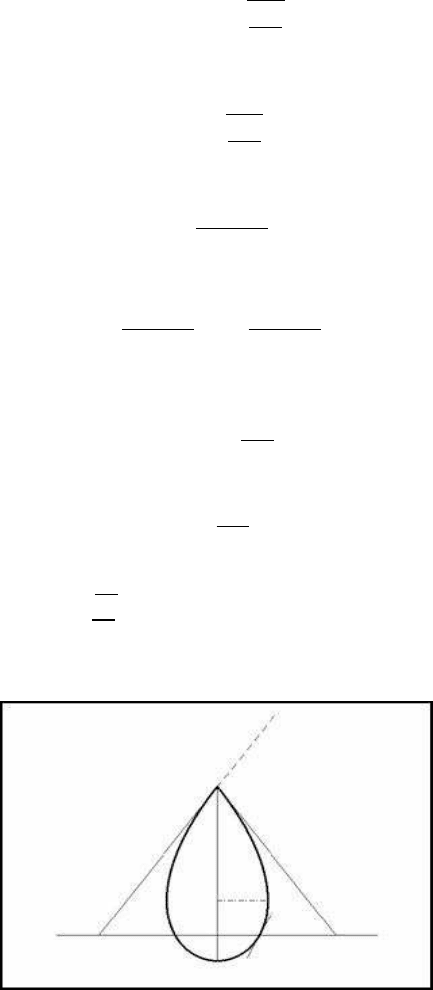
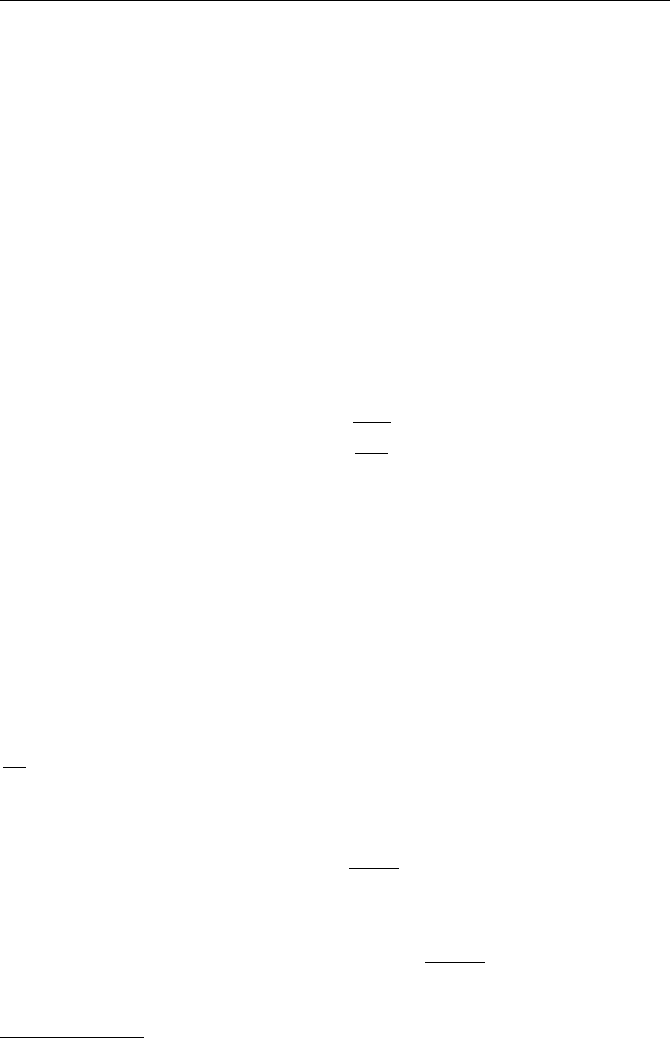
FIGURE 8.1: The limiting trajectory
160 Chaotic Modelling and Simulation
Some very interesting properties of equation (8.8) are illustrated in Figure 8.1.
The trajectory in the limit of escape has an egg shape, similar to but different from
those discussed in Chapter 7. The sharp corner is at the maximum value of y =
MG
a
2
,
where x = 0. This is the fixed point for the system, which is not stable.
The minimum value of y is that where the maximum rotation speed is achieved.
This can be found by setting x = 0 in equation (8.9). This gives us two solutions, the
fixed point at y =
MG
a
2
as already discussed, and the solution to the equation:
(ay + h)
2
= −4ahy
The largest solution of this equation is:
y =
2
√
2 − 3
MG
a
2
≈ −0.1716
MG
a
2
(8.10)
The maximum value of x is given by:
x
max
=
MG
a
2
s
5
√
5 − 11
2
≈ 0.3
MG
a
2
This is computed by equating to zero the first derivative of x with respect to y, that
is:
∂x
∂y
=
˙x
˙y
=
1
x
a
8(MG)
2
ay +
MG
a
3
− y
!
= 0 (8.11)
Setting z =
a
h
y, equation (8.11) becomes:
(z + 1)
3
= 8z
This can be easily seen to have the three roots:
z = 1, z =
√
5 − 2, z = −
√
5 − 2
The first of these corresponds to the fixed point
0,
MG
a
2
. The second is the one we
are after, and the corresponding y value is:
y =
MG
a
2
(
√
5 − 2)
When y = 0, then
x =
MG
4a
2
=
h
4a
, r =
h
2
4MG
=
h
4a
and ∆θ =
8a
2
h
so from (8.7) we get:
dy
dx
=
˙y
˙x
=
x∆θ
a − y∆θ
=
h
4a
·
8a
2
h
a
= 2
Rotations 161
This tangent appears in Figure 8.1.
The tangent at the top sharp corner of the egg-shaped path can be seen by writing
equation (8.8) in a coordinate system centered at this point. For this reason, let:
z = y −
MG
a
2
= y −
h
a
Then, in terms of (x, z), equation (8.8) can be written as:
0 = −x
2
+
a
4h
z
2
·
2h
a
+ 2z +
a
4h
z
2
!
= −x
2
+
1
2
z
2
+ ···
where the omitted terms are of higher order in z. This means that near (x, z) = (0, 0),
our orbit behaves exactly like the function:
0 = −x
2
+
1
2
z
2
=
1
√
2
z − x
!
1
√
2
z + x
!
So the two tangent lines are given by the equations:
y =
h
a
±
√
2x
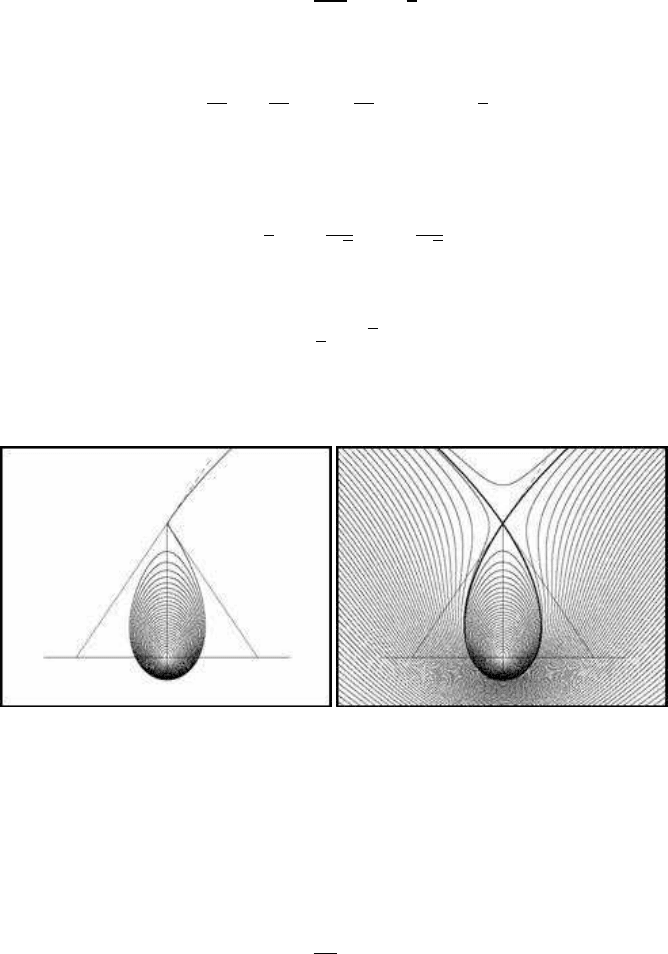
(a) Rotating paths (b) Paths in the plane
FIGURE 8.2: Rotating paths
Figure 8.2(a) illustrates the path of a moving particle. The particle follows an anti-
clockwise direction. It starts from a point near zero and rotates away from the centre
until the highest permitted place. Then, it escapes to infinity following the tangent on
the top of the egg-shaped path. In Figure 8.2(b), a large number of paths are drawn.
Every path has the same value for h =
MG
a
2
. The paths outside the egg-shaped limits
162 Chaotic Modelling and Simulation
have direction from left to right and they do not transverse the egg-shaped region of
the plane. The iterative formula used for the above simulations is:
x
n+1
= x
n
+
a − y
n
√
MGr
3
n
d
y
n+1
= y
n
+ x
n
√
MGr
3
n
d
r
n
=
q
x
2
n
+ y
2
n
(8.12)
where, for the above figures, a = 2, MG = 100 and d = 0.05.
Other interesting properties of the aforementioned egg-shaped forms arise by us-
ing elements from mechanics. From the equations of motion, it is clear that the para-
meter a is a constant speed with direction parallel to the x axis. The rotational speed
has two components: ˙x, ˙y. However, at the top and at the bottom of the egg-shaped
form only the x component of the velocity is present, since x = 0. The rotational
speed, or the transverse component of the velocity, is v =
q
MG
y
. This speed must be
equal to a. Thus, without using the equations for the trajectories, the value of y at
the top, x = 0, is estimated from the equality v − a = 0. Thus,
s
MG
y
= a
and
y =
MG
a
2
To obtain the equation for the total speed at the lower point of the curve, we must
take into account that this speed must be equal to the escape speed:
v + a = v
esc
(8.13)
The escape speed for a mass rotating around a large body is known from mechanics
to be:
v
esc
=
s
2MG
y
Thus, equation (8.13) becomes:
s
MG
y
+ a =
s
2MG
y
Finally, from this last equation the value of y is:
y =
MG
a
2
(
√
2 − 1)
2
This is, up to a sign, the same result obtained in equation (8.10). It is obvious
that the system in these particular cases obeys the laws of classical mechanics. This
egg-like form is a set of vortex curves with relative stability and strength.
Rotations 163
8.3 A Discrete Rotation-Translation Model
The analysis above is significant in helping us understand the dynamics under-
lying the rotation analogue in the discrete case. The iterative scheme based on the
difference equations for rotation-translation is more difficult to handle analytically,
but, on the other hand, it is closer to a real life situation. No approximation is needed,
whereas, the egg-shaped scheme and the trajectories are retained. Moreover, the tra-
jectories inside the egg-shaped boundary are perfectly closed loops. Additionally, the
chaotic nature of the rotation-translation procedure near the centre becomes appar-
ent. In the equations (8.4), we introduce an area contracting parameter b (0 < b < 1),
and the final equations used are the following
x
n+1
= a + b
(
x
n
cos ∆θ − y
n
sin ∆θ
)
y
n+1
= b
(
x
n
sin ∆θ + y
n
cos ∆θ
)
(8.14)
where the same approximation
∆θ
n
≈
s
MG
r
3
n
is used.
A convenient formulation of the last iterative map expressing rotation and transla-
tion is achieved by using the following difference equation
f
n+1
= a + b f
n
e
i∆θ
(8.15)
where f
n
= x
n
+ iy
n
.
The Jacobian determinant of this map is J = b
2
= λ
1
λ
2
. This is an area contracting
map if the Jacobian J is less than 1. The eigenvalues of the Jacobian are λ
1
and λ
2
,
and the translation parameter is a.
A very interesting property of the map (8.14) is the existence of a disk F of radius
ab
1−b
centered at (a, 0) in the (x, y) plane. The points inside the disk remain inside it
under the map.
2
To locate the fixed points of this transformation, let us change coordinates by
setting:
z
n
= f
n
−
a
1 − b
2
Then the transformation can be rewritten as:
z
n+1
− z
n
=
be
i∆θ
− 1
z
n
+ ab
e
i∆θ
− b
1 − b
2
!
2
This fact is left as an exercise for the reader.