Russ J.C. Image Analysis of Food Microstructure
Подождите немного. Документ загружается.

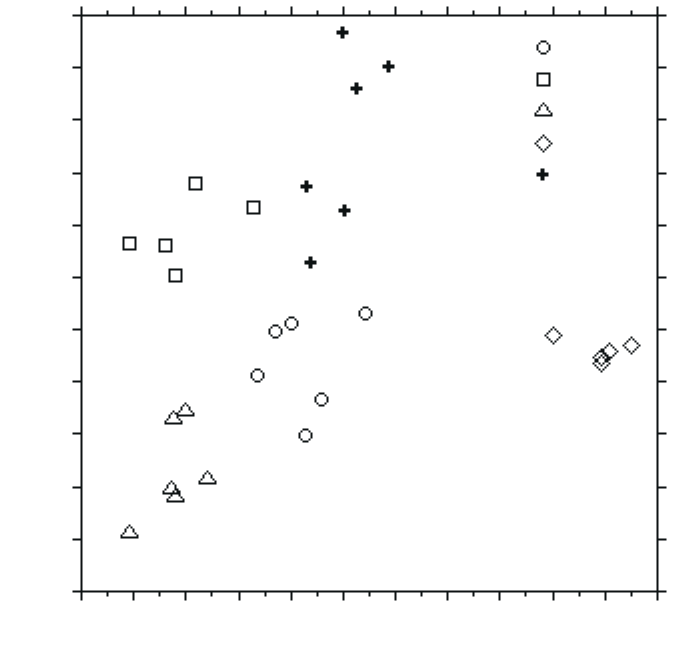
FIGURE 5.54 Two-parameter plot of inscribed radius and radius ratio (inscribed/circum-
scribed) separates the five nut classes.
.35 .4 .45 .5 .55 .6 .65 .7 .75 .8 .85 .9
Radius_Ratio
.45
.5
.55
.6
.65
.7
.75
.8
.85
.9
.95
1
Inscrib.Rad.(cm)
almond
brazil
cashew
filbert
walnut
2241_C05.fm Page 357 Thursday, April 28, 2005 10:30 AM
Copyright © 2005 CRC Press LLC
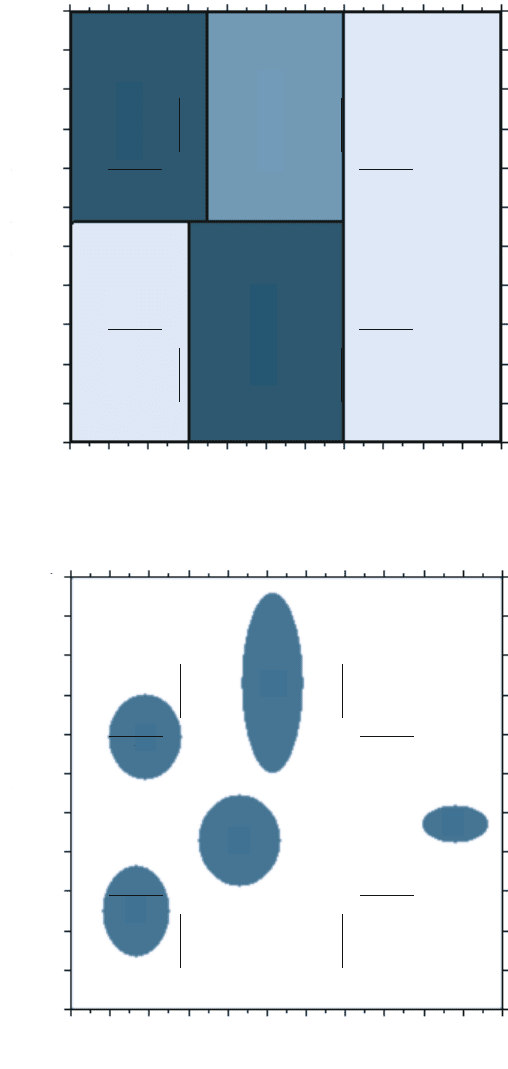
FIGURE 5.55 Parameter ranges that classify the five nut types.
FIGURE 5.56 Nut classes described by mean and standard deviation.
.35 .4 .45 .5 .55 .6 .65 .7 .75 .8 .85 .9
Radius Ratio
Inscribed Radius
.45
.5
.55
.6
.65
.7
.75
.8
.85
.9
.95
1
Brazil
Cashew
Almond
Walnut
Filbert
.35 .4 .45 .5 .55 .6 .65 .7 .75 .8 .85 .9
Radius Ratio
Inscribed Radius
.45
.5
.55
.6
.65
.7
.75
.8
.85
.9
.95
1
A
B
C
W
F
2241_C05.fm Page 358 Thursday, April 28, 2005 10:30 AM
Copyright © 2005 CRC Press LLC
CONCLUSIONS
In addition to the stereological measurement of structure, described in Chapter
1, there is often interest in the individual features present in an image. Counting the
features present must take into account the effects of a finite image size, and deal
with the features that are intersected by the edges. Additional edge corrections are
needed when feature measurements are performed.
Feature measurements can be grouped into measures of size, shape, position
(either absolute or relative to other features present) and color or density values
based on the pixel values recorded. Calibration of the image dimensions and intensity
values are usually based on measurement of known standards and depend on the
stability and reproducibility of the system.
The variety of possible measures of size, shape, and position results in a large
number of measurement parameters which software can measure. The algorithms
used vary in accuracy, but a greater concern is the problem of deciding which
parameters are useful in each application. That decision must rely on the user’s
independent knowledge of the specimens, their preparation, and the imaging tech-
niques used.
Interpretation of measured data often makes use of descriptive statistics such as
mean and standard deviation, histogram plots showing the distribution of measured
values, and regression plots that relate one measurement to another. Comparisons
of different populations generally require nonparametric procedures if the measured
values are not normally distributed. Classification (feature identification) is also a
statistical process, which usually depends on the measurement of representative
training sets from each population.
2241_C05.fm Page 359 Thursday, April 28, 2005 10:30 AM
Copyright © 2005 CRC Press LLC