Russ J.C. Image Analysis of Food Microstructure
Подождите немного. Документ загружается.

SIZE DISTRIBUTIONS
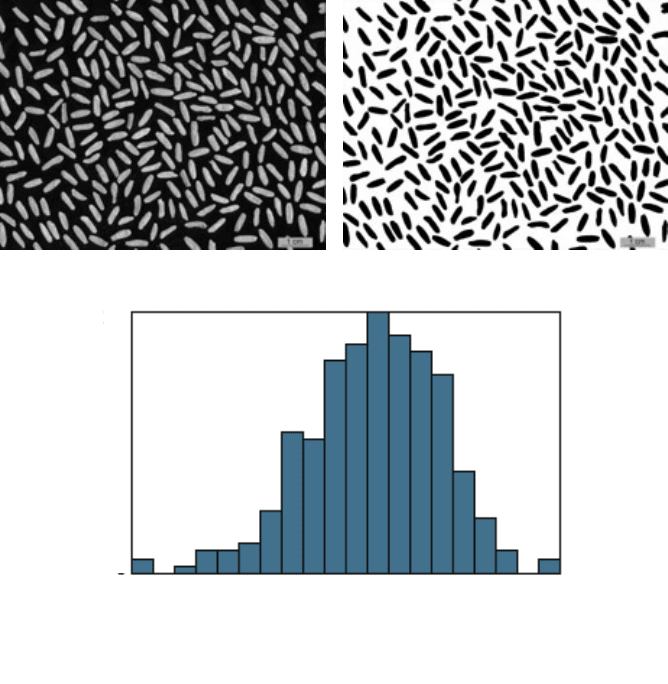
Distributions of the sizes for natural objects such as rice grains often produce
normal distributions. Statisticians know that the central limit theorem predicts that
in any population for which there are a great many independent variables (genetics,
nutrients, etc.) that affect a property such as size, the result tends toward a normal
distribution. The statistical interpretation of data is somewhat beyond the intended
scope of this text, but statistical properties such as the skew (ideally equal to 0) and
kurtosis (ideally equal to 3) are often used to judge whether a distribution can be
distinguished from a Gaussian, and a chi-squared test may also be used.
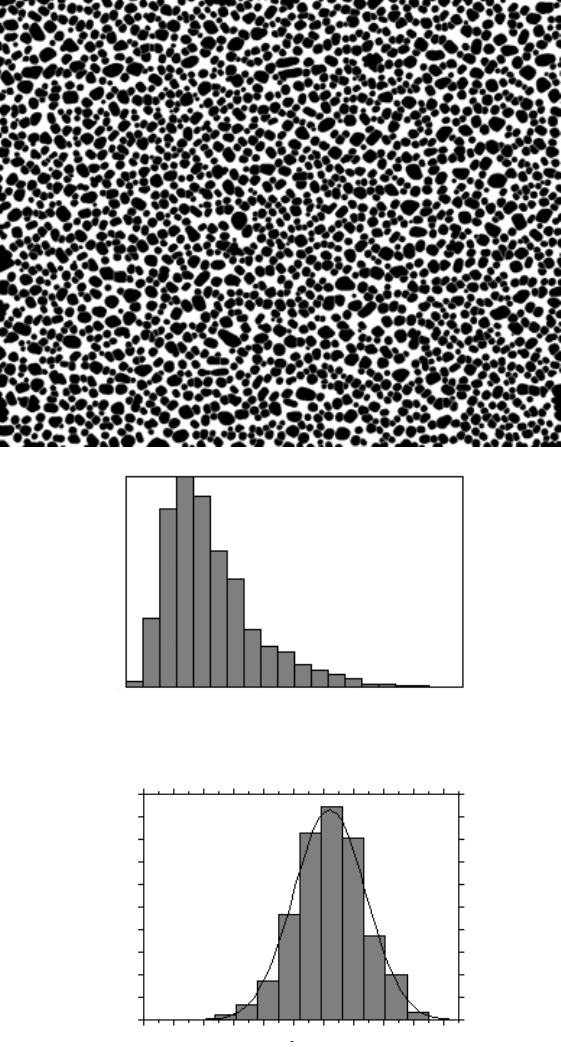
Another common type of distribution that arises from many thermodynamic
processes is a log-normal curve, with a few large features and many small ones. The
ice crystals in ice cream shown in Figure 5.15 provide an example. The sizes (areas
(a) (b)
(c)
FIGURE 5.14
Measurement of the length of rice grains: (a) original image; (b) thresholded;
(c) histogram of measurements.
Min = 0.56
Max = 0.95
Total = 261, 20 bins
Mean = 0.78088, Std.Dev.=0.06404
Skew = -0.40239, Kurtosis = 3.45471
0
34
Count
Length (cm)
2241_C05.fm Page 297 Thursday, April 28, 2005 10:30 AM
Copyright © 2005 CRC Press LLC

(a)
(b)
FIGURE 5.15
Ice crystals in ice cream (after some remelting has caused rounding of cor-
ners); (a) original image, courtesy of Ken Baker, Ken Baker Associates); (b) thresholding the
feature outlines; (c) filling the interiors and performing a watershed segmentation; (d) distri-
bution of sizes (area, with measurements in pixels); (e) replotted on a log scale with a
superimposed best-fit Gaussian curve for comparison.
2241_C05.fm Page 298 Thursday, April 28, 2005 10:30 AM
Copyright © 2005 CRC Press LLC
(c)
(d)
(e)
FIGURE 5.15 (continued)
Min = 2
Max = 1413
Total = 2031, 20 bins
Mean = 361.538, Std.Dev.=199.082
Skew = 1.40048, Kurtosis = 5.51926
0
385
Count
Area (pixels)
Log(Area)
0
50
100
150
200
250
300
350
400
450
500
Count
2241_C05.fm Page 299 Thursday, April 28, 2005 10:30 AM
Copyright © 2005 CRC Press LLC
(a)
(b)
(c)
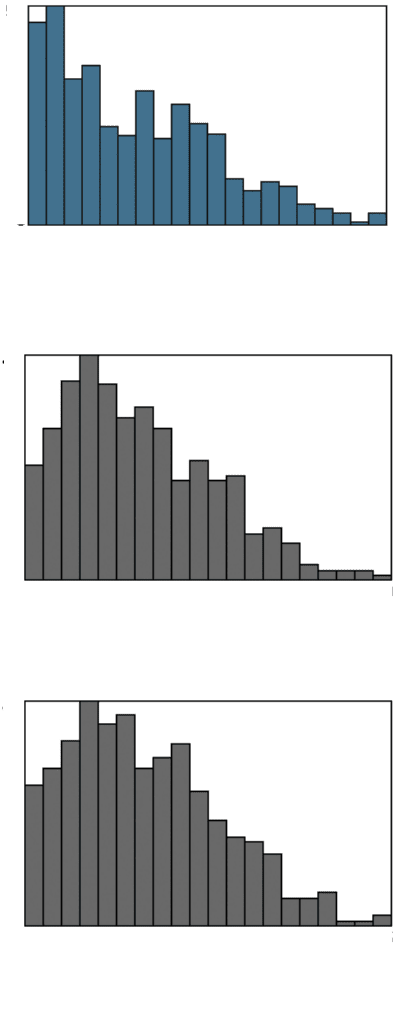
FIGURE 5.16
Size measurements on the cornstarch particles in Figure 5.1: (a) inscribed
circle; (b) circumscribed circle; (c) equivalent circular diameter.
Min = 1.00
Max = 17.41
To tal = 394, 20 bins
Mean = 6.29887, Std.Dev.=3.71002
Skew = 0.58911, Kurtosis = 2.75569
0
52
Count
Inscribed Radius
Min = 0.71
Max = 29.00
To tal = 394, 20 bins
Mean = 9.2432, Std.Dev.=5.76310
Skew = 0.61376, Kurtosis = 2.89793
0
44
Count
Circumscribed Radius
Min = 1.12
Max = 43.23
To tal = 394, 20 bins
Mean = 15.4848, Std.Dev.=9.04708
Skew = 0.52308, Kurtosis = 2.64997
0
41
Count
Equivalent Diameter
2241_C05.fm Page 300 Thursday, April 28, 2005 10:30 AM
Copyright © 2005 CRC Press LLC
measured in pixels) produce a plot that is skewed toward the right, but plotting
instead a histogram of the log values of the feature areas produces a Gaussian result.
The image in this example was processed by thresholding of the outlines of the
crystals, filling in the interiors, and applying a watershed segmentation.
But not all feature size distributions are Gaussian or log-normal. The cornstarch
particles shown in Figure 5.1 were measured using equivalent circular diameter,
inscribed circle radius, and circumscribed circle radius. The histograms (Figure 5.16)
do not have any easily-described shape, and furthermore each parameter produces
a graph with a unique appearance. It is not easy to characterize such measurements,
which often result when particle sizes and shapes vary widely.
COMPARISONS
When distributions have a simple shape such as a Gaussian, there are powerful
and efficient (and well known) statistical tools that can be used to compare different
groups of features to determine whether they come from the same parent population
or not. For two groups, the student’s t-test uses the means, standard deviations and
number of measurements to calculate a probability that the groups are distinguish-
able. For more than two groups, the same procedure becomes the Anova (analysis
of variance). These methods are supported in most statistical packages and can even
be implemented in spreadsheets such as Microsoft Excel
®
.
For measurements that do not have a simple distribution that can be described
by a few parameters such as mean and standard deviation, these methods are inap-
propriate and produce incorrect, even misleading results. Instead, it is necessary to
use non-parametric statistical comparisons. There are several such methods suitable for
comparing groups of measurements. The Mann-Whitney (also known as Wilcoxon)
procedure ranks the individual measurements from two groups in order and calcu-
lates the probability that the sequence of groups numbers could have been produced
by chance shuffling. It generalizes to the Kruskal-Wallis test for more than two
groups. These methods are most efficient for relatively small numbers of observations.
When large numbers of measurements have been obtained, as they usually are
when computer-based image analysis methods are employed, the ranking procedure
is burdensome. A much more efficient technique for large groups is the Kolmogorov-
Smirnov (K-S) test. This simply compares the cumulative distribution plots of the
two groups to find the greatest difference between them and compares that value to
a test value computed from the number of observations in each group. The probability
that the two groups do not come from the same population is then given directly.
Figure 5.17 illustrates the procedure for size data from two different groups of
measurements. The measurements of length have been replotted as cumulative
graphs, so that for each size the height of the line is the fraction of the group that
has equal or smaller values. In this specific case the horizontal axis has been
converted to a log scale, which does not affect the test at all since only the vertical
difference between the plots matters. The horizontal axis (the measured value) has
units, but the vertical axis does not (it simply varies from 0 to 1.0). Consequently,
the maximum difference between the two plots, wherever it occurs, is a pure number,
which is used to determine the probability that the two populations are different. If
2241_C05.fm Page 301 Thursday, April 28, 2005 10:30 AM
Copyright © 2005 CRC Press LLC
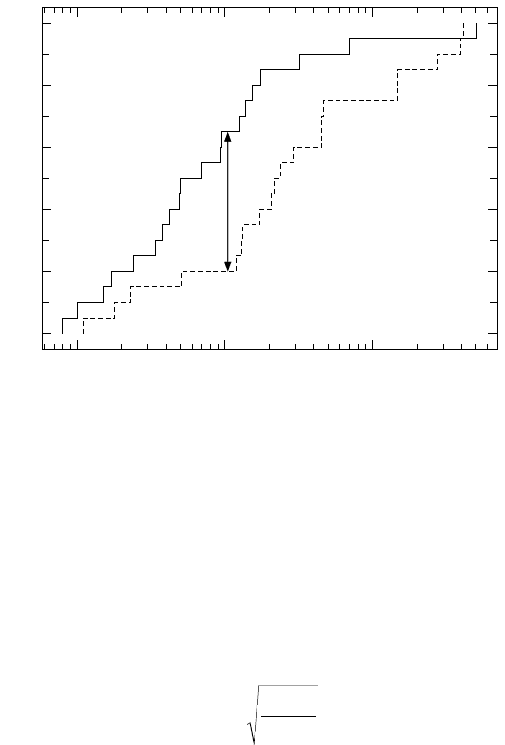
the difference value D is greater than the test value, then at that level of confidence
the two groups of measurements are probably from different populations.
Tables of K-S test values for various levels of significance can be found in many
statistical texts (e.g., D. J. Sheskin,
Parametric and Nonparametric Statistical Pro-
cedures
, Chapman & Hall/CRC, Boca Raton, FL, 2000), but for large populations
can be calculated as
(5.1)
where
n
1
and
n
2
are the number of measurements in each group, and
A
depends on
the level of significance. For values of probability of 90, 95 and 99%, respectively,
A
takes values of 1.07, 1.22 and 1.52.
Other nonparametric tests for comparing populations are available, such as the
D’Agostino and Stephens method. The K-S test is widely used because it is easy to
calculate and the graphics of the cumulative plots make it easy to understand. The
important message here is that many distributions produced by image measurements
are not Gaussian and cannot be properly analyzed by the familiar parametric tests.
This is especially true for shape parameters, which are discussed below. It is con-
sequently very important to use an appropriate non-parametric procedure for statis-
tical analysis.
FIGURE 5.17
Principle of the Kolmogorov-Smirnov nonparametric test. The largest differ-
ence D that occurs between cumulative plots of the features in the two distributions is used
to compute the probability that they represent different populations.
0.1
1.0
10.0
Length (mm)
0
20
40
60
80
100
Cumulative Percent
D
SA
nn
nn
=⋅
+
⋅
12
12
2241_C05.fm Page 302 Thursday, April 28, 2005 10:30 AM
Copyright © 2005 CRC Press LLC

EDGE CORRECTION
The measurements shown in Figures 5.15 and 5.16 were done with a correction
for edge-touching features. In the section above on counting, a procedure that
counted features intersecting two edges and ignored ones intersecting the other two
edges was used. But it is not possible to measure the features that intersect any edge,
because there is no information beyond the edge. Since large features are more likely
to intersect an edge than small ones, measurement and counting with no edge
correction would produce a biased set of measurements that systematically under-
represented large features. There are two solutions to this problem.
The older edge-correction procedure is based on the counting correction method.
As shown in Figure 5.18, a guard region is drawn inside the image. Features that
cross the lines that mark the edge of the active counting region are measured and
counted normally, as are all features that reside entirely within the active region.
Features that lie inside the guard region are not measured or counted, nor is any
feature that touches the edge of the image. Consequently, the guard frame must be
wide enough that no feature ever crosses the edge of the active region (which requires
that it be measured and counted) and also reaches the edge of the image (which
means that it cannot be measured). That means the guard frame must be wider than
the maximum dimension of any feature present.
FIGURE 5.18
Use of a guard frame for unbiased measurement. The straight lines mark the
limits of the active measurement area. Features that lie in the guard frame region or intersect
any edge of the image are neither measured nor counted.
2241_C05.fm Page 303 Thursday, April 28, 2005 10:30 AM
Copyright © 2005 CRC Press LLC

Because the guard frame method reduces the size of active counting region
compared to the full image area, and results in not measuring many features that
are present in the image (because they lie within the guard frame), many computer-
based systems that work with digital images use the second method. Every feature
that can be measured (does not intersect any edge of the field of view) is measured
and counted. But instead of counting in the usual way with integers, each feature is
counted using real numbers that compensate for the probability that other similar
features, randomly placed in the field of view, would intersect an edge and be
unmeasurable.
As shown in Figure 5.19 and Equation 5.2, the adjusted count is calculated from
the dimensions of the field of view and the projected dimensions of the feature in
the horizontal and vertical directions. For small features, the adjusted count is close to
1. But large features produce adjusted counts that can be significantly greater than 1,
because large features are more likely to intersect the edges of the field of view.
When distributions of feature measurements are plotted, the adjusted counts are used
to add up the number of features in each bin. Statistical calculations such as mean
and standard deviation must use the adjusted count as a weight factor for each
feature, complicating the math slightly.
(5.2)
The use of the adjusted count changes the shape of distributions slightly and
can markedly alter statistical values. Figure 5.20 shows the results for equivalent
circular diameter on the features within the entire image (not using a guard frame)
in Figure 5.18. Notice that the total count of features (ones that do not intersect any
FIGURE 5.19
When every feature within the image is measured, an adjusted count must be
used. The dimensions of the image (W
x
and W
y
) and the projected dimensions of the feature
(F
x
and F
y
) are used to calculate the adjusted count according to Equation 5.2.
AdjCount
WW
WFWF
XY
XX YY
.
()()
=
⋅
−⋅−
2241_C05.fm Page 304 Thursday, April 28, 2005 10:30 AM
Copyright © 2005 CRC Press LLC
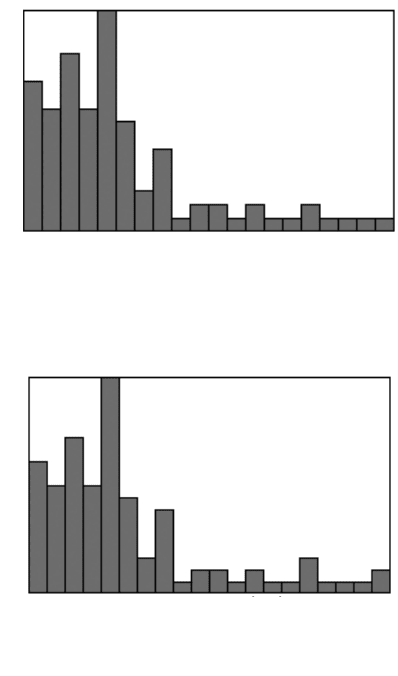
edge) is 92 without edge correction, but 106 with the correction, and the mean value
also increases by more than 10%.
As pointed out above, large features are more likely than small ones to intersect
the edge of the measuring field so that they cannot be measured. Features whose
widths are more than 30% of the size of the image will touch an edge more often
than not. Note that it is absolutely not permitted to adjust the position of the camera,
microscope stage, or objects to prevent features from touching the edge. In general,
any fiddling with the field of view to make the measurement process easier, or select
particular features based on aesthetic grounds, or for any other reason, is likely to
bias the data. There is a real danger in manual selection of fields to be measured.
The implementation of a structured randomized selection procedure in which the
opportunity for human selection is precluded is strongly encouraged to avoid intro-
ducing an unknown but potentially large bias in the results.
(a)
(b)
FIGURE 5.20
Effect of edge correction on the measurement data from the features in Figure
5.18: (a) without edge correction; (b) with edge correction.
Min = 1.95 Equivalent Diam.(cm) Max = 79.33
To tal = 92, 20 bins
Mean = 22.2584, Std. Dev. = 17.1842
Skew = 1.47378, Kurtosis = 4.64965
0
17
Count
Min = 1.95 Equivalent Diam.(cm) Max = 79.33
To tal = 106, 20 bins
Mean = 24.8842, Std. Dev. = 19.1968
Skew = 1.24078, Kurtosis = 3.63249
0
19
Count
2241_C05.fm Page 305 Thursday, April 28, 2005 10:30 AM
Copyright © 2005 CRC Press LLC
Edge intersection of large features can also be reduced by dropping the image
magnification so that the features are not as large. But if the image also contains
small features, they may become too small to cover enough pixels to provide an
accurate measurement. Features with widths smaller than about 20 pixels can be
counted, but their measurement has an inherent uncertainty because the way the
feature may happen to be positioned on the pixel grid can change the dimension by
1 pixel (a 5% error for something 20 pixels wide). For features of complex shape,
even more pixels are needed to record the details with fidelity.
Figure 5.21 shows three images of milk samples. After homogenization, all of
the droplets of fat are reduced to a fairly uniform and quite small size, so selection
of an appropriate magnification to count them and measure their size variation is
straightforward. The ratio of maximum to minimum diameter is less than 5:1. But
before homogenization, depending on the length of time the milk is allowed to stand
while fat droplets merge and rise toward the top (and depending on where the sample
is taken), the fat is present as a mixture of some very large and many very small
droplets. In the coarsest sample (Figure 5.21c) the ratio of diameters of the largest
to the smallest droplets is more than 50:1.
It is for samples such as these, in which large size ranges of features are present,
that images with a very large number of pixels are most essential. As an example, an
image with a width of 500 pixels would realistically be able to include features up to
about 100 pixels in width (20% of the size of the field of view), and down to about 20
pixels (smaller ones cannot be accurately measured). That is a size range of 5:1. But
to accommodate 50:1 if the minimum limit for the small sizes remains at 20 pixels and
the field of view must be five times the size of the largest (1000 pixel) features, an
image dimension of 5000 pixels is required, corresponding to a camera of about 20
million total pixels. Only a few very high-resolution cameras (or a desktop scanner)
can capture images of that size. It is the need to deal with both large and small features
in the same image that is the most important factor behind the drive to use cameras
with very high pixel counts for microstructural image analysis.
Furthermore, a 50:1 size range is not all that great. Human vision, with its 150
million light sensors, can (by the same reasoning process) satisfactorily deal with
features that cover about a 1000:1 size range. In other words, we can see features
that are millimeter in size and ones that are a meter in size at the same time. To see
smaller features, down to 100
µ
m for example, we must move our eyes closer to
the sample, and lose the ability to see large meter-size features. Conversely, to see
a 100 meter football field we look from far off and cannot see centimeter size
features. So humans are conditioned to expect to see features that cover a much
larger range of sizes than digital cameras can handle.
There are a few practical solutions to the need to measure both large and small
features in a specimen. One is to capture images at different magnifications, measure
them to record information only on features within the appropriate size range, and then
combine the data from the different magnifications. If that is done, it is important to
weight the different data sets not according to the number of images taken, but to the
area imaged at each magnification. That method will record the information on indi-
vidual features, but does not include information on how the small features are spatially
distributed with respect to the large ones. For that purpose, it is necessary to capture
2241_C05.fm Page 306 Thursday, April 28, 2005 10:30 AM
Copyright © 2005 CRC Press LLC