Russ J.C. Image Analysis of Food Microstructure
Подождите немного. Документ загружается.

For some purposes, such as locating spots on electrophoresis gels, the absolute
coordinates are important (in that case, the density-weighted centroid seems the
most reasonable choice). In many more applications, it is neighbor distances that
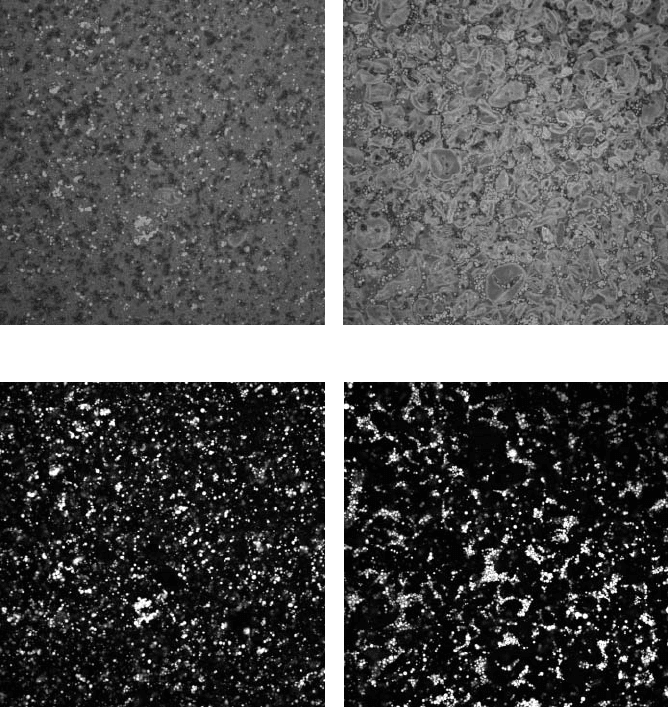
provide a way to measure spatial distributions. In the example shown in Figure 5.29,
the two different custards have visually obvious differences in the uniformity with
which the fat globules are dispersed. They have been processed by thresholding the
red channel in a color image (because they were stained with Nile Red) and plotting
the ultimate eroded points (the local peaks in the Euclidean distance map), which
were then used as the locations of the features.
(a) (b)
(c) (d)
FIGURE 5.29 Measuring the spatial dispersion of fat in custard (courtesy of Anke M. Jan-
ssen, ATO B.V., Food Structure and Technology): (a, b) two custards (see Color Figures 3.56
and 4.7; see color insert following page 150); (c, d) thresholded red channels.
2241_C05.fm Page 317 Thursday, April 28, 2005 10:30 AM
Copyright © 2005 CRC Press LLC
The nearest neighbor distances are calculated with the Pythagorean theorem
from the absolute coordinates of the features in the image. A search is needed to
locate the minimum value, but with modern computers this is very fast for images
containing only hundreds or thousands of features. The key to using nearest neighbor
distance as a measure of spatial distribution lies in the characteristics of a random
distribution, in which each feature is independent and feels no force attraction or
repulsion from the others (like sprinkling pepper onto a table). In that case, as shown
in Figure 5.30, the nearest neighbor distances have a Poisson distribution. This is
the hallmark of a random distribution. The Poisson distribution has very simple
statistical properties, one of which is that the mean value can be calculated simply
from the number of points. For a random distribution the mean nearest neighbor
distance will be
(5.3)
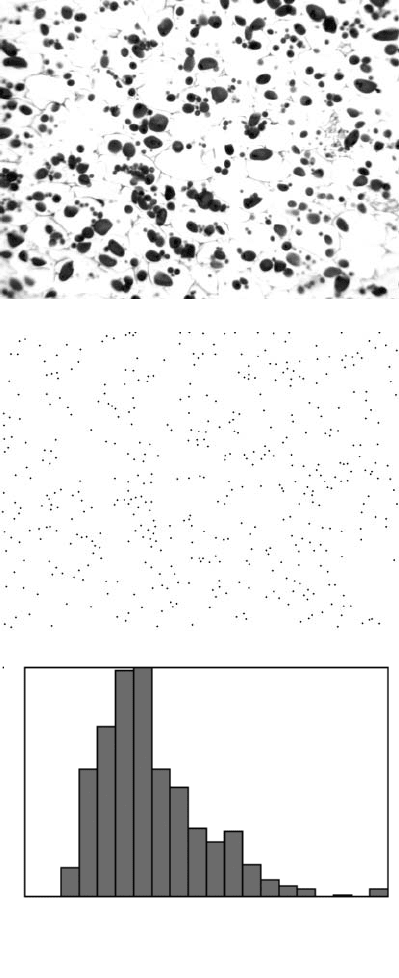
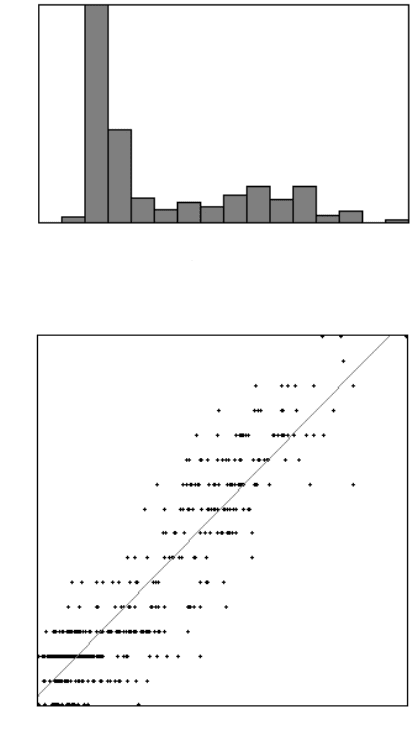
For the starch granules in potato tissue shown in Figure 5.30 the histogram has
the shape of a Poisson distribution and a mean value of 35.085 (pixels). The calcu-
lated mean nearest neighbor distance for 447 features in an image that is 1600 ×
1200 pixels in size is 32.76. These values are statistically indistinguishable for that
number of features so we would conclude that the distribution of starch grains cannot
be distinguished from random.
If the features are clustered together, the mean nearest neighbor distance is less
than that calculated using the equation for the random distribution. Conversely if
they are self-avoiding, the actual mean nearest neighbor distance is greater. The ratio
of the actual mean nearest neighbor distance to the value calculated for a random
spatial distribution is a useful measure of the tendency of the distribution toward
clustering or self-avoidance. Since the distance values are compared only as ratios,
the actual image calibrated magnification is not needed for this purpose.
Applying this procedure to the fat globules in the images of Figure 5.29 reports
the following results:
From these results it is evident that one of the two custards has a random distribution
of fat globules, but in the other there is clustering present.
Conversely, Figure 4.41 of Chapter 4 showed a distribution of protein bodies
and starch granules that were self-avoiding. There can be many reasons for clustering
Actual Mean Calculated Mean
Image
Nearest Neighbor
Distance (in.)
Distance for
Random case (in.)
Figure 25(c)0.12880.0985
Figure 25(d)0.12540.1248
Mean Nearest Neighbor Distance =
Number
Area
0.5
2241_C05.fm Page 318 Thursday, April 28, 2005 10:30 AM
Copyright © 2005 CRC Press LLC
(a)
(b)
(c)
FIGURE 5.30 The spatial distribution of starch granules in potato: (a) magenta channel from
the color image in Chapter 3, Figure 3.57 and Color Figure 3.57 (see color insert folllowing
page 150); (b) ultimate eroded points for the starch granules; (c) distribution plot of measured
nearest neighbor distances.
Min = 0 Nearest Neighbor Distance(µm) Max = 100
To tal = 447, 20 bins
Mean = 35.0851, Std. Dev. = 15.5192
Skew = 1.62929, Kurtosis = 8.47838
0
79
Count
2241_C05.fm Page 319 Thursday, April 28, 2005 10:30 AM
Copyright © 2005 CRC Press LLC
or self-avoidance, including chemical depletion, surface tension, electrostatic forces,
etc. Finding that a non-random structure is present is only the first step in under-
standing the reasons for the structure to have formed. Figure 5.14 showed an image
of rice grains dispersed for length measurement. The means of dispersal, a vibrating
table, should produce mechanical interactions between the grains causing them to
separate. Measuring the mean nearest neighbor distance produces a result of 5.204 mm,
which is much greater than the value of 2.440 mm predicted for a random distribu-
tion. This confirms the (expected) self-avoiding nature of the dispersal.
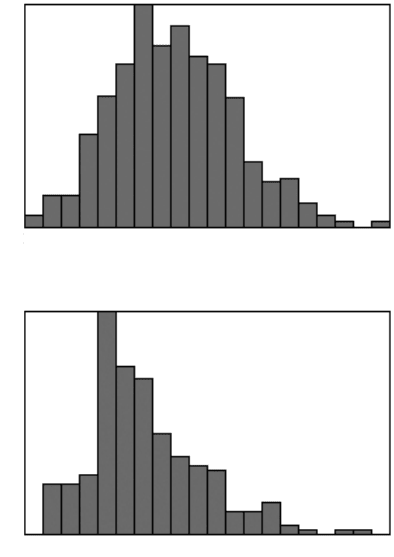
In this image there is a significant difference between the nearest neighbor
distance based on centroid-to-centroid spacing and the distance of closest approach
or minimum separation between features. Figure 5.31 shows plots of the two different
distances, and Figure 5.32 illustrates the meaning of the two parameters. In many
structures, the identity of the feature that is nearest by one definition is not even the
same as that which is closest by the other, which leads to some interesting but
complex possibilities for performing statistical analysis on neighbor pairs. It is also
interesting to observe that the nearest neighbor directions and the feature orientations
in the rice image are not isotropic, as shown in Figure 5.33. In other words, there
(a)
(b)
FIGURE 5.31 Plots of the distribution of nearest neighbor distance for the rice grains in
Figure 5.14: (a) based on centroid-to-centroid distance; (b) based on the minimum edge-to-
edge separation distance.
3.054
Nearest Neighbor Distance (mm)
8.409
0
35
Count
Total = 261
0.0
Minimum Separation Distance (mm)
3.0
0
50
Count
Total = 261
2241_C05.fm Page 320 Thursday, April 28, 2005 10:30 AM
Copyright © 2005 CRC Press LLC
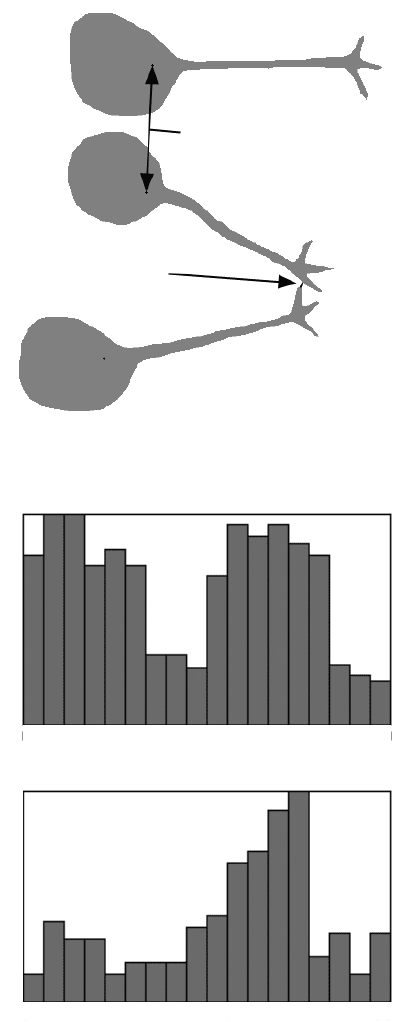
FIGURE 5.32 Diagram illustrating the nearest neighbor distance based on centroid-to-cen-
troid spacing and edge-to-edge minimum separation, which may not be to the same neighbor.
(a)
(b)
FIGURE 5.33 Plots revealing anisotropy in the rice grains in Figure 5.14: (a) nearest neighbor
direction; (b) orientation angle of the grains.
Nearest
Neighbor
Distance
Minimum
Separation
Distance
0
Nearest Neighbor Direction (deg)
360
0
22
Count
Total = 261
0
Orientation Angle (deg)
180
0
38
Count
2241_C05.fm Page 321 Thursday, April 28, 2005 10:30 AM
Copyright © 2005 CRC Press LLC
is a tendency toward alignment of the features, as might be expected from consid-
eration of how the dispersal is accomplished.
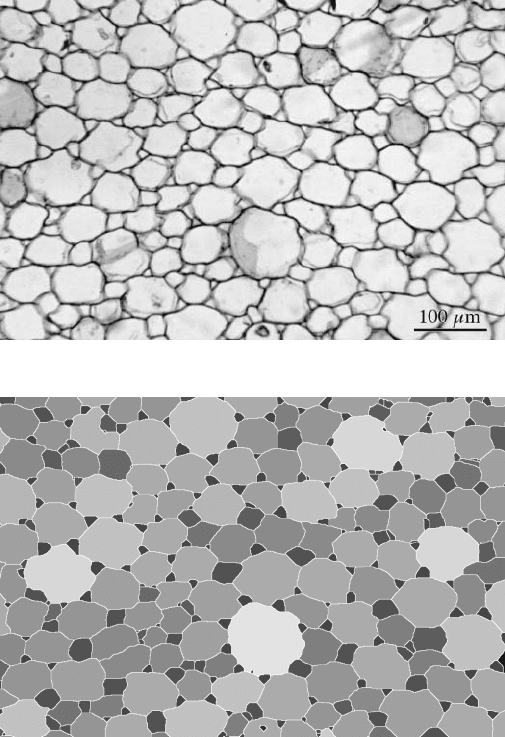
Another type of neighbor relationship is the number of adjacent features, which
is often the same as the number of sides on a polygonal feature. This arises most
often in cell structures such as the corn plant section in Figure 5.34. In three
dimensions the cells are polyhedra. Where the section plane cuts through the center
of a cell, it produces a polygon with many sides and a large number of adjacent
(a)
(b)
FIGURE 5.34 Section through corn plant tissue: (a) original image; (b) cells with grey scale
values representing the number of touching neighbors; (c) plot of the number of sides (note
the large number of three-sided cell sections); (d) regression plot of number of adjacent
neighbors vs. cell size.
2241_C05.fm Page 322 Thursday, April 28, 2005 10:30 AM
Copyright © 2005 CRC Press LLC
neighbors. While the number of neighbors seen in the section is less than the number
of touching neighbors in three dimensions, the analysis of number of neighbors still
reveals some important characteristics of different types of structures. The maximum
shown in the image is a cell with 16 neighbors. Where the location of the cut passes
through a corner of the three-dimensional cell it produces a small section with a
small number of sides. Note the very large number of three-sided sections, most of
which occupy positions between the larger cells. As shown in the figure, there is a
strong correlation between size and number of adjacent neighbors.
(c)
(d)
FIGURE 5.34 (continued)
0
223
Count
Min = 1 Adjacent Feature Count Max = 16
Mean = 4.42485, Std. Dev.=4.27309
To t al = 717
16
1
Adjacent Feature Count
min=1.128 Equivalent Circular Diameter
max=124.7
Equation: Y = 0.12385 * X + 1.25098
R-squared = 0.91532, 517 points
2241_C05.fm Page 323 Thursday, April 28, 2005 10:30 AM
Copyright © 2005 CRC Press LLC
GRADIENTS
One major reason for interest in the location of features is to discover and
characterize gradients in structure. Most natural materials, and many manufactured
ones, are far from uniform, but instead have systematic and consistent variations in
size, shape, density, etc., as a function of location. In many cases, the direction of
the gradient is perpendicular to some surface or boundary. The complexity of struc-
ture and the natural variation in the size, shape, density, etc. of the individual features,
can make it very difficult to detect visually the true nature of the gradient. Hence,
computer measurement may be required.
Depending on the image magnification and the scale of the gradient, position
may be measured by the Euclidean distance map or by simple X- or Y-coordinates.
If the distance from some boundary or feature within the image is important, the
EDM is the tool of choice. This was illustrated in Figures 4.42 to 4.44 in Chapter
4. For situations such as determining a gradient normal to a surface, if the image
shows a section taken perpendicular to the surface, the Y-coordinate of a feature in
the image may provide the required position information. In either case, plots of
feature property vs. position are used to reveal and characterize the gradient.
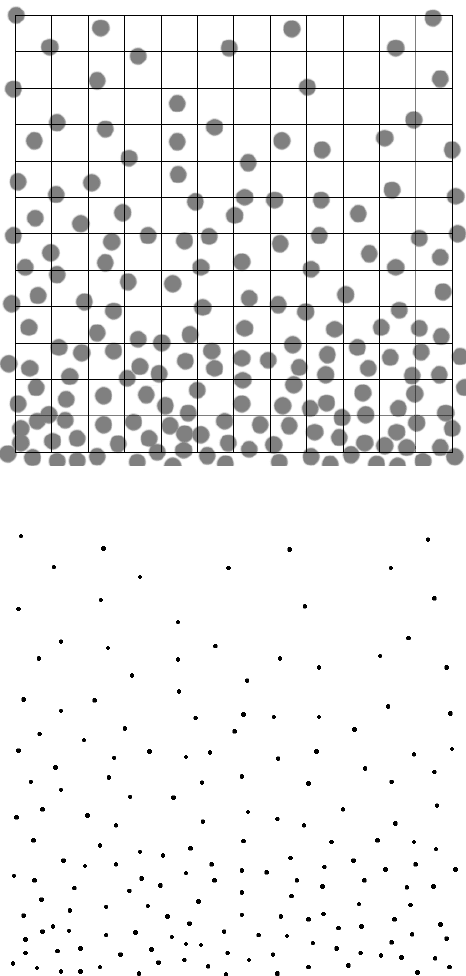
As an example, Figure 5.35 repeats a diagram from Chapter 1 (Figure 1.13).
Instead of counting the number of hits made by points in a grid to estimate the vertical
gradient, as done there, procedures based on feature measurement will be used. A
plot of area fraction vs. vertical position can be generated by counting the number
of pixels covered by features at each vertical position (Figure 5.35c). However, that
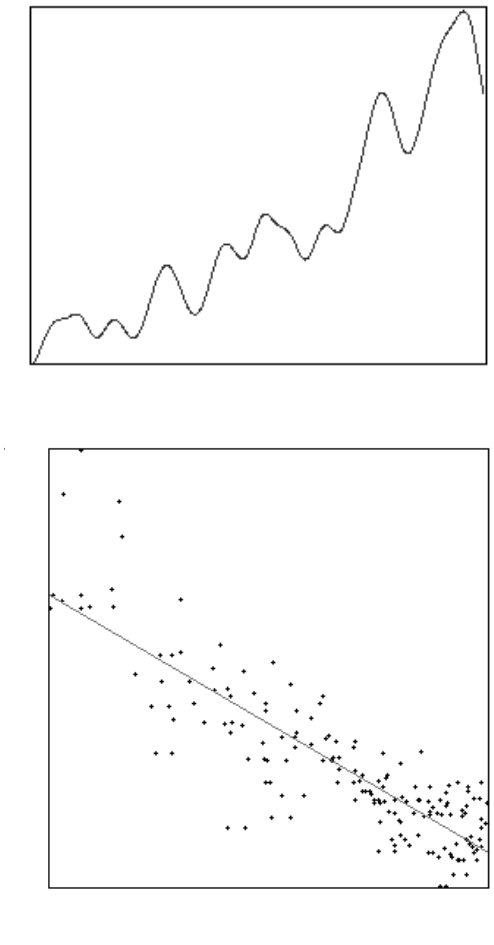
is not a feature-specific measurement. Visually, the nearest neighbor distance for
each feature changes most strikingly from bottom to top of the image. Reducing
each feature to its ultimate eroded point and measuring the nearest neighbor distance
for each feature produces a graph (Figure 5.35d) that shows this gradient.
All of the features in the preceding example were identical in size and shape, it
is only their distance from their neighbors that varies. More often the variation is
in the size, shape and density parameters of the individual features. In the example
in Figure 5.36, the size of each cell in plant tissue is measured. The procedure used
was to threshold the image, skeletonize the binary result and then convert the skeleton
to a 4-connected line that separates the cells. Measurement of the size (equivalent
circular diameter) of each cell and plotting it against the horizontal position (of the
centroid) produces the result shown in Figure 5.36(e). This plot is difficult to
interpret, because of the scatter in the data. The band of small cells about 40% of
the way across the width of the image is present, but not easy to describe. Interpre-
tation of the data can be simplified by coloring each cell with a grey scale value
that is set proportional to the size value (Figure 5.36d). A plot of the average pixel
brightness value as a function of horizontal position averages all of the size infor-
mation and shows the location of the band of small cells, as well as the overall
complex trend of size with position.
Sometimes the color coding of features is not even required. In the example of
Figure 5.37, an intensity plot on the original image suffices to show the structural
gradient. The image is a cross-section of a bean. There is a radial variation in cell
2241_C05.fm Page 324 Thursday, April 28, 2005 10:30 AM
Copyright © 2005 CRC Press LLC
(a)
(b)
FIGURE 5.35 Measuring a vertical gradient: (a) original with superimposed grid; (b) ultimate
eroded points; (c) plot of area fraction vs. position; (d) plot of nearest neighbor distance vs.
position.
2241_C05.fm Page 325 Thursday, April 28, 2005 10:30 AM
Copyright © 2005 CRC Press LLC
(c)
(d)
FIGURE 5.35 (continued)
Ver tical Position
0
52
Area Fraction (%)
72.12
13.41
Nearest Neighbor Distance
min=15 Vertical Position (pixels) max=507
Equation: Y = -0.07013 * X + 53.7397
R-s
q
uared = 0.86095
,
168
p
oints
2241_C05.fm Page 326 Thursday, April 28, 2005 10:30 AM
Copyright © 2005 CRC Press LLC