Руководство по программированию Siemens. Расширенное программирование SINUMERIK 840D/840Di/810D
Подождите немного. Документ загружается.

9
09.01 Параметры движения по траектории
9
840D
NCU 571
840D
NCU 572
NCU 573
810D
840Di
ООО Siemens 2001 Все права защищены.
SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01 9-331
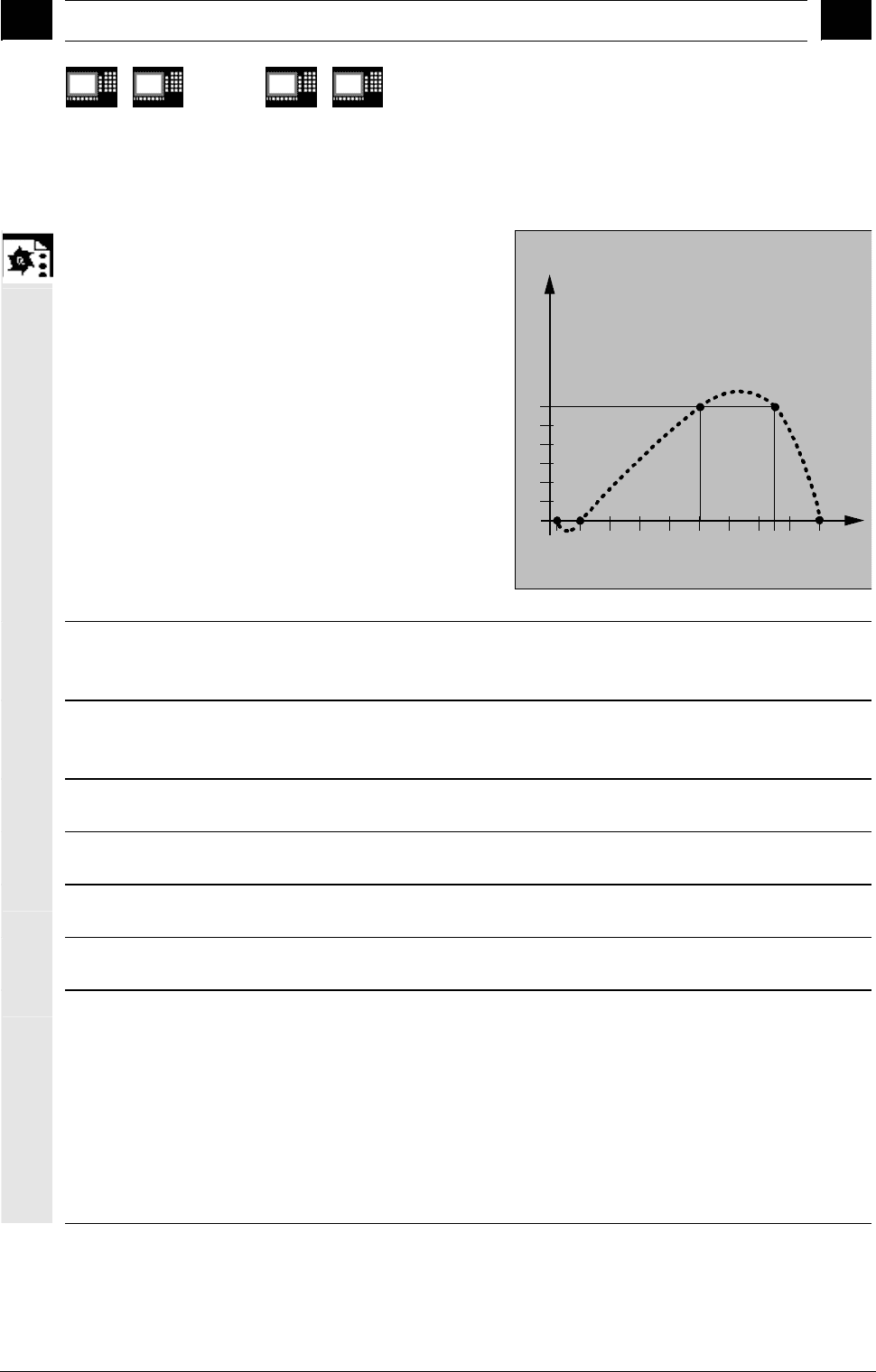
Пример программирования 1
Определение таблицы кривых
Y
X
205
1
2
3
4
5
6
100 150 180
N100 CTABDEF(Y,X,3,0)
Начало определения не периодической таблицы
кривых с номером 3
N110 X0 Y0
1-ый оператор движения, определяет стартовое
значение и 1-ое опорное место:
ведущее значение: 5; ведомое значение: 0
N120 X20 Y0
2-ое опорное место: ведущее значение: 0…20;
ведомое значение: стартовое значение …0
N130 X100 Y6
3-е опорное место: ведущее значение: 20…100;
ведомое значение: 0…6
N140 X150 Y6
4-ое опорное место: ведущее значение: 100…150;
ведомое значение: 6…6
N150 X180 Y0
5-ое опорное место: ведущее значение: 150…180;
ведомое значение: 6…0
N200 CTABEND
Конец определения; таблица кривых создается в
ее внутреннем представлении как полином макс. 3-
его порядка; вычисление участка кривой с
указанными опорными местами зависит от
модально выбранного вида интерполяции
(круговая, линейная, сплайн-интерполяция);
состояние программы обработки деталей до
начала определения восстанавливается.
9
Параметры движения по траектории 09.01
9
840D
NCU 571
840D
NCU 572
NCU 573
810D
840Di
ООО Siemens 2001 Все права защищены.
9-332 SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01
Пример программирования 2
Определение периодической таблицы кривых с
номером 2, диапазон ведущего значения от 0 до
360, движение ведомой оси от 0 к 45
и обратно к 0:
N10 DEF REAL DEPPOS;
N20 DEF REAL GRADIENT;
N30 CTABDEF(Y,X,2,1)
Начало определения
N40 G1 X=0 Y=0
N50 POLY
N60 PO[X]=(45.0)
N70 PO[X]=(90.0) PO[Y]=(45.0,135.0,-
90)
N80 PO[X]=(270.0)
N90 PO[X]=(315.0) PO[Y]=(0.0,-
135.0,90)
N100 PO[X]=(360.0)
N110 CTABEND
Конец определения
Тест кривой через связь Y с X:
N120 G1 F1000 X0
N130 LEADON(Y,X,2)
N140 X360
N150 X0
N160 LEADOF(Y,X)
Чтение функции таблиц при ведущем значении
75.0:
N170 DEPPOS=CTAB(75.0,2,GRADIENT)
Позиционирование ведущей и ведомой оси:
N180 G0 X75 Y=DEPPOS
После включения связи синхронизация ведомой
оси не требуется:
N190 LEADON(Y,X,2)
N200 G1 X110 F1000
N210 LEADOF(Y,X)
N220 M30
9
09.01 Параметры движения по траектории
9
840D
NCU 571
840D
NCU 572
NCU 573
810D
840Di
ООО Siemens 2001 Все права защищены.
SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01 9-333
9.4 Осевое соединение по ведущему значению, LEADON, LEADOF
Программирование
LEADON(FAchse,LAchse,n)
LEADOF(FAchses,LAchse,n)
Объяснение
LEADON
Включение соединения по ведущему значению
LEADOF
Выключение соединения по ведущему значению
FAchse
Ведомая ось
LAchse
Ведущая ось
n
Номер таблиц кривых
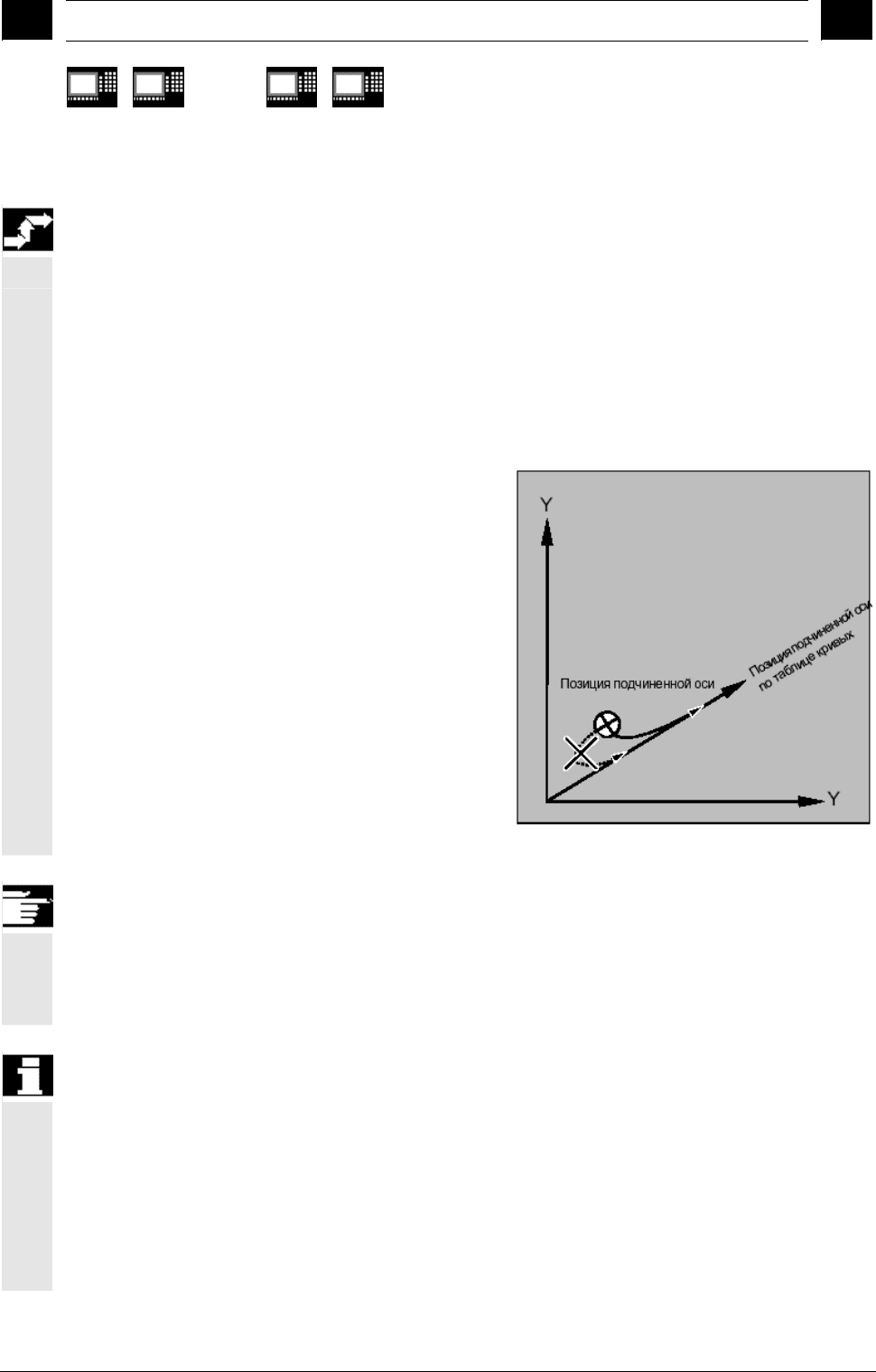
Функция
При осевом соединении по ведущему значению
ведущая и ведомая ось перемещаются
синхронно. При этом соответствующая позиция
ведомой оси через таблицу кривых или
вычисленный из нее полином однозначно
подчинена – при необходимости
смоделированной – позиции ведущей оси.
Ведущей осью называется та ось, которая дает
входные значения для таблицы кривых.
Ведомой называется ось, которая принимает
вычисленные через таблицу кривых позиции.
X
Y
Соединение по ведущему значению может
включаться и выключаться как из программы
обработки деталей, так и при движении из
синхронного действия (глава 10).
Соединение по ведущему значению всегда
действует в базовой кинематической системе.
Для создания таблиц кривых см. раздел
"Таблицы кривых" в этой главе. По «Соединению
по ведущему значению»см. /FB/, M3, Буксировка
и соединение по ведущему значению.
9
Параметры движения по траектории 09.01
9
840D
NCU 571
840D
NCU 572
NCU 573
810D
840Di
ООО Siemens 2001 Все права защищены.
9-334 SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01
Выполнение
Соединение по ведущему значению требует
синхронизации ведущей и ведомой оси. Эта
синхронизация может быть получена только в
том случае, если ведомая ось при включении
соединения по ведущему значению находится
внутри диапазона допуска вычисленного из
таблицы кривых участка кривой.
Диапазон допуска для позиции ведомой оси
определен через машинные данные 37200
COUPLE_POS_TOL_COARSE.
Если при включении соединения по ведущему
значению ведомая ось еще не находится в
соответствующей позиции, то синхронный ход
создается сразу же после того, как только
вычисленное заданное значение позиции для
ведомой оси приблизится к фактической позиции
ведомой оси. При этом ведомая ось в процессе
синхронизации перемещается в направлении,
определенном через заданную скорость ведомой
оси (вычисляется из скорости ведущей оси и
CTAB).
Прочие указания
Если вычисленная позиция ведомой оси при
включении соединения по ведущему значению
удаляется от актуальной позиции ведомой оси, то
синхронных ход не создается.
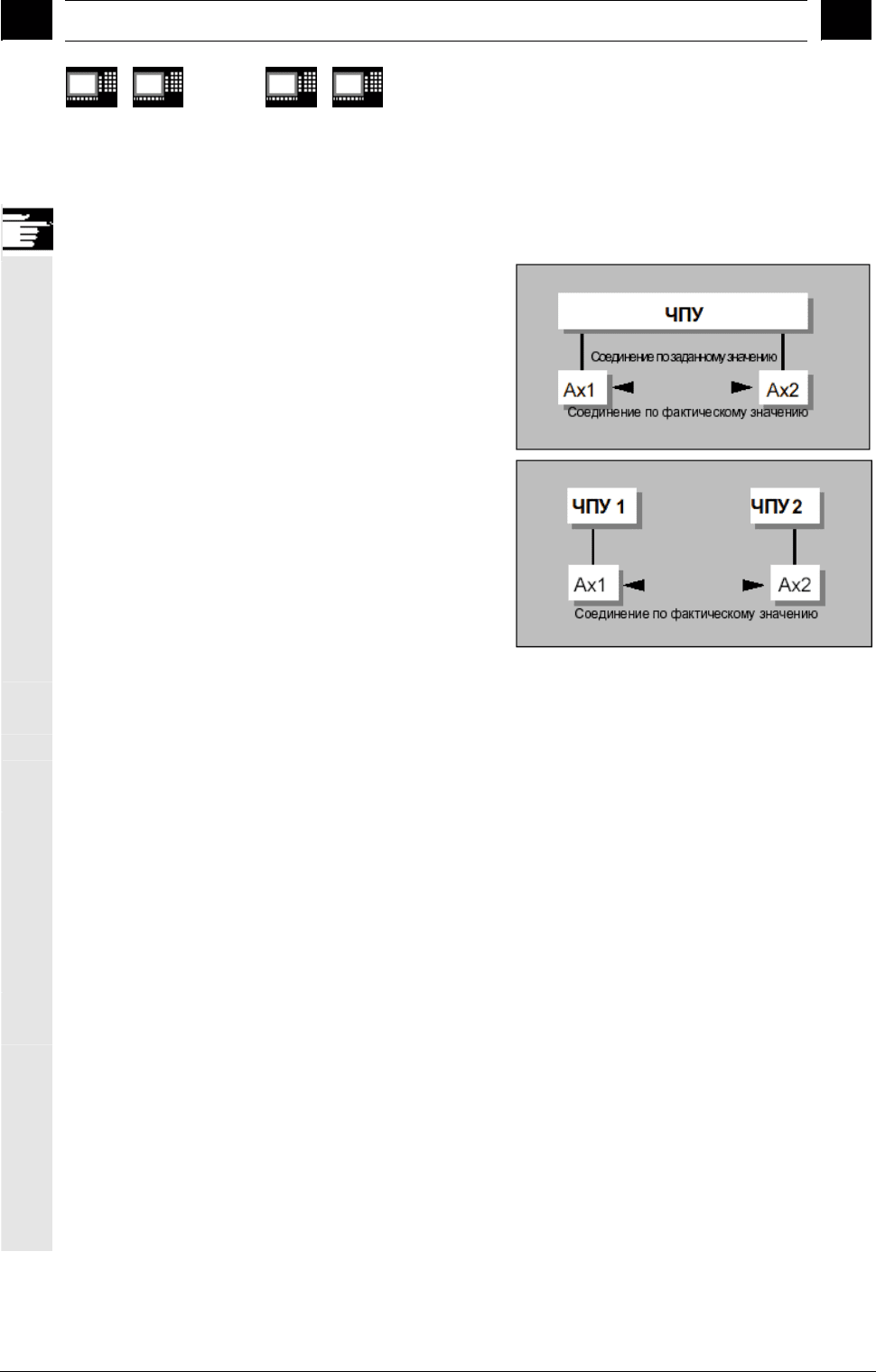
Соединение по фактическому и заданному
значению
В качестве ведущих значений, т.е. исходных
значений для вычисления позиции ведомой оси,
могут использоваться:
• фактические значения позиции ведущей оси:
соединение по фактическому значению
• заданные значения позиции ведущей оси:
соединение по заданному значению.
9
09.01 Параметры движения по траектории
9
840D
NCU 571
840D
NCU 572
NCU 573
810D
840Di
ООО Siemens 2001 Все права защищены.
SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01 9-335
Прочие указания
Соединение по заданному значению создает по
сравнению с соединением по фактическому
значению лучший синхронный ход между
ведущей и ведомой осью и поэтому является
стандартной предварительной установкой.
Соединение по заданному значению возможно
только при интерполяции ведущей и ведомой оси
одним и тем же ЧПУ. В случае внешней ведущей
оси ведомая ось может быть связана с ведущей
осью только через фактические значения.
Переключение между соединением по
фактическому и заданному значению
Переключение возможно через установочные
данные $SA_LEAD_TYPE.
Переключение между соединением по
фактической и заданной величине всегда должно
осуществляться при остановленной ведомой оси.
Так как только при остановке после
переключения осуществляется новая
синхронизация.
Пример использования:
Чтение фактических значений не может
осуществляться без ошибок при сильных
вибрациях станка. Поэтому при использовании
соединения по ведущему значению в операциях с
прессовым транспортом и сильными вибрациями
может быть необходимо переключение с
соединения по фактическому значению на
соединение по заданному значению.
9
Параметры движения по траектории 09.01
9
840D
NCU 571
840D
NCU 572
NCU 573
810D
840Di
ООО Siemens 2001 Все права защищены.
9-336 SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01
Моделирование ведущего значения при соединении по
заданному значению
Через машинные данные интерполятор для ведущей оси
может быть отделен от сервопривода. Таким образом, при
соединении по заданному значению заданные значения
могут создаваться без фактического движения ведущей оси.
Созданные через соединение по заданному значению
ведущие значения, к примеру, для использования в
синхронных действиях, могут считываться из следующих
переменных:
- $AA_LEAD_P
Ведущее значение позиции
- $AA_LEAD_V
Ведущее значение скорости
Прочие указания
Ведущие значения могут создаваться по выбору с помощью
других самостоятельно запрограммированных методов.
Созданные таким образом ведущие значения записываются
в переменные
- $AA_LEAD_SP
Ведущее значение позиции
- $AA_LEAD_SV
Ведущее значение скорости
и считываются из них. Для использования этих переменных
должны быть заданы установочные данные
$SA_LEAD_TYPE = 2.
Состояние связи
Выключение соединения по ведущему значению,
LEADOF
При выключении соединения по ведущему значению
ведомая ось снова становится обычной командной осью!
Осевое соединение по ведущему значению и различные рабочие состояния
В зависимости от установки в машинных данных соединения по ведущему
значению выключаются с помощью RESET.

9
09.01 Параметры движения по траектории
9
840D
NCU 571
840D
NCU 572
NCU 573
810D
840Di
ООО Siemens 2001 Все права защищены.
SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01 9-337
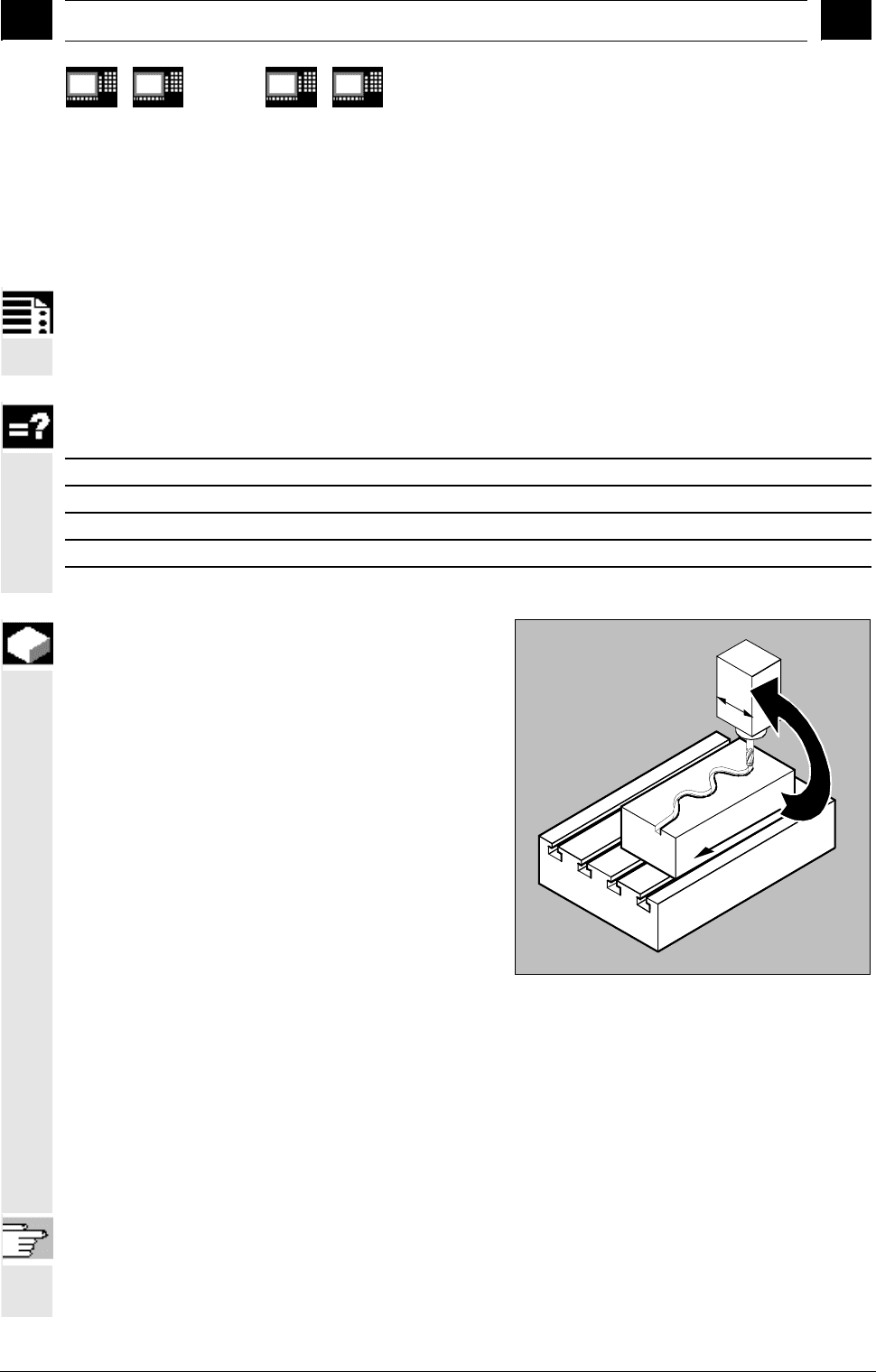
Пример программирования
У пресса обычное механическое соединение между
ведущей осью (вал пуансона) и осями трансфертной
системы из трансфертных и вспомогательных осей
должно быть заменено на электронную систему связи.
Этот пример показывает, как у пресса механическая
трансфертная система заменяется на электронную
трансфертную систему. Процессы соединения и
разъединения реализуются как статические синхронные
действия.
Трансфертные оси и вспомогательные оси управляются
ведущей осью LW (вал пуансона), как ведомые оси,
определенные через таблицы кривых.
Ведомые оси
X подающая или продольная ось
YL замыкающая или поперечная ось
ZL ходовая (подъемная) ось
U вальцовая подача, вспомогательная ось
V корректир. головка, вспомогательная ось
W смазка, вспомогательная ось
Управление состоянием
Процессы коммутации и соединения управляются
через переменные реального времени:
$AC_MARKER[i]=n
с:
i номер идентификатора
n величина состояния
Действия
В качестве действий в синхронных действиях выступают, к примеру:
• замыкание, LEADON(ведомая ось, ведущая ось, номер таблиц кривых)
• размыкание, LEADOF(ведомая ось, ведущая ось)
• установка фактического значения, PRESETON(ось, значение)
• установка идентификатора, $AC_MARKER[i]= значение
• вид соединения: реальное/виртуальное ведущее значение
• Запуск позиций осей, POS[ось]=значение
Условия
В качестве условий обрабатываются цифровые быстрые входы, переменные реального
времени $AC_MARKER и сравнения позиций, связанные логическим оператором AND.
Указание
В следующем примере смена целей, вставки и выделение используются исключительно
для улучшения читаемости программирования. Для СЧПУ находящиеся под одним
номером кадра операторы стоят в одной строке.
Комментарий
9
Параметры движения по траектории 09.01
9
840D
NCU 571
840D
NCU 572
NCU 573
810D
840Di
ООО Siemens 2001 Все права защищены.
9-338 SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01
; определяет все статические синхронные действия.
; **** сброс маркера
N2 $AC_MARKER[0]=0 $AC_MARKER[1]=0
$AC_MARKER[2]=0 $AC_MARKER[3]=0
$AC_MARKER[4]=0 $AC_MARKER[5]=0
$AC_MARKER[6]=0 $AC_MARKER[7]=0
; **** E1 0=>1 замыкание трансферта ВКЛ
N10 IDS=1 EVERY ($A_IN[1]==1) AND
($A_IN[16]==1) AND ($AC_MARKER[0]==0)
DO LEADON(X,LW,1) LEADON(YL,LW,2)
LEADON(ZL,LW,3) $AC_MARKER[0]=1
;**** E1 0=>1 замыкание вальцовой подачи
ВКЛ
N20 IDS=11 EVERY ($A_IN[1]==1) AND
($A_IN[5]==0) AND ($AC_MARKER[5]==0)
DO LEADON(U,LW,4) PRESETON(U,0)
$AC_MARKER[5]=1
; **** E1 0->1 замыкание кор. головки ВКЛ
N21 IDS=12 EVERY ($A_IN[1]==1) AND
($A_IN[5]==0) AND ($AC_MARKER[6]==0)
DO LEADON(V,LW,4) PRESETON(V,0)
$AC_MARKER[6]=1
; **** E1 0->1 замыкание смазки ВКЛ
N22 IDS=13 EVERY ($A_IN[1]==1) AND
($A_IN[5]==0) AND ($AC_MARKER[7]==0)
DO LEADON(W,LW,4) PRESETON(W,0)
$AC_MARKER[7]=1
; **** E2 0=>1 размыкание
N30 IDS=3 EVERY ($A_IN[2]==1)
DO LEADOF(X,LW) LEADOF(YL,LW)
LEADOF(ZL,LW) LEADOF(U,LW)
LEADOF(V,LW) LEADOF(W,LW) $AC_MARKER[0]=0
$AC_MARKER[1]=0 $AC_MARKER[3]=0
$AC_MARKER[4]=0 $AC_MARKER[5]=0
$AC_MARKER[6]=0 $AC_MARKER[7]=0
....
N110 G04 F01
N120 M30
9
09.01 Параметры движения по траектории
9
840D
NCU 571
840D
NCU 572
NCU 573
840Di
ООО Siemens 2001 Все права защищены.
SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01 9-339
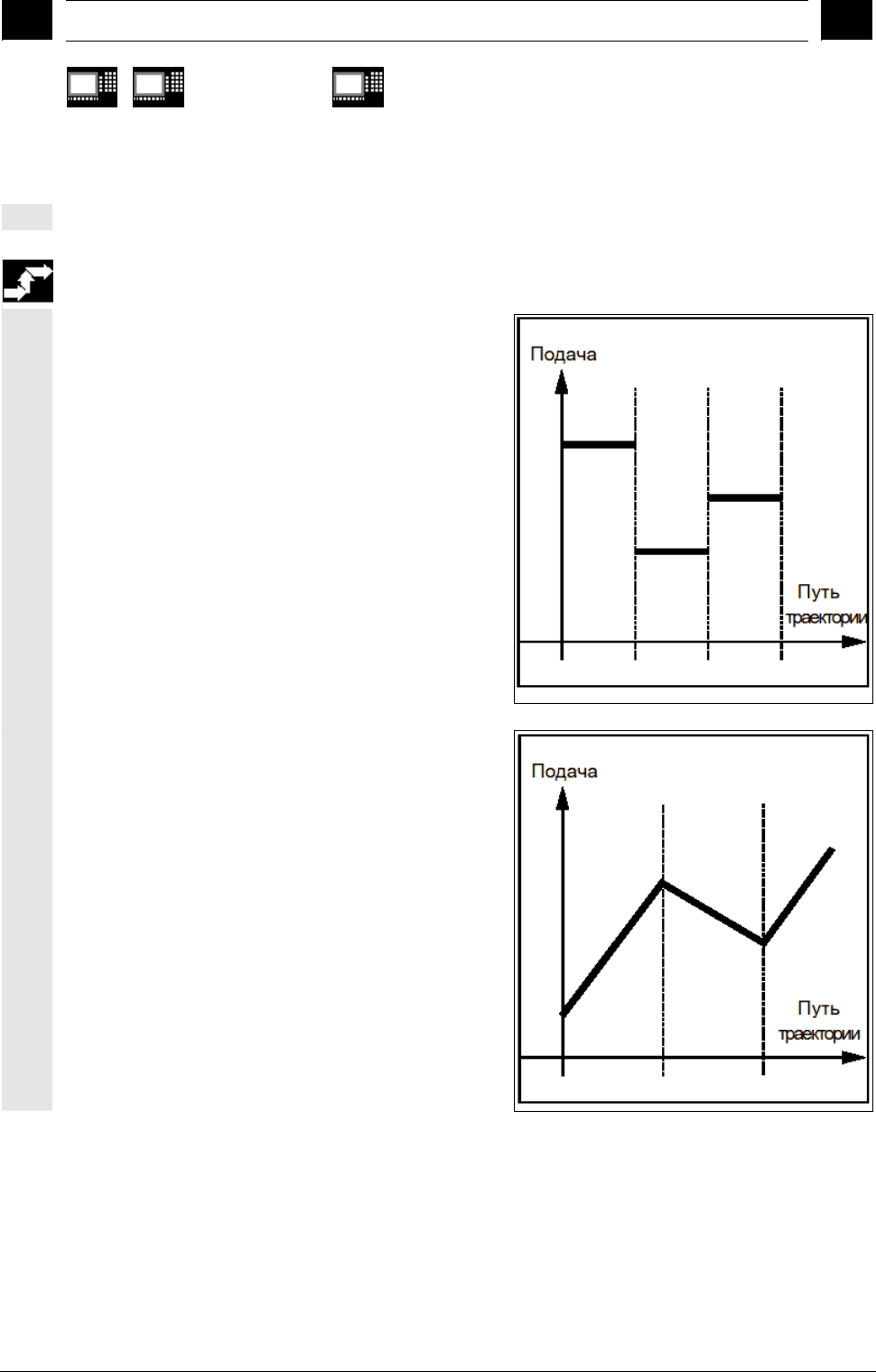
9.5 Ход подачи, FNORM, FLIN, FCUB, FPO
Программирование
F… FNORM
F… FLIN
F… FCUB
F=FPO(…,…,…)
Объяснение
FNORM
Первичная установка. Величина подачи задается через путь
траектории кадра и действует после этого как модальная величина.
FLIN
Линейный профиль скорости траектории:
Величина подачи выводится от актуального значения в начале
кадра до конца кадра через путь траектории линейно и действует
после этого как модальная величина.
FCUB
Кубический профиль скорости траектории:
Запрограммированные покадрово F-величины соединяются -
относительно конечной точки кадра - сплайном. Сплайн начинается
и заканчивается тангенциально к предыдущим или последующим
данным подачи.
Если в кадре отсутствует F-адрес, то для этого используется
последняя запрограммированная F-величина.
F=FPO…
Профиль скорости траектории через полином:
F-адрес обозначает ход подачи через полином от актуальной
величины до конца кадра. Конечная величина действует после
этого как модальная величина.
Функция
Для гибкой задачи хода подачи
программирование подачи по DIN 66025
дополняется линейными и кубическими ходами.
Кубические ходы могут программироваться
напрямую или как интерполирующие сплайны.
Благодаря этому – в зависимости от изгиба
обрабатываемой детали – могут
программироваться непрерывно ровные ходы
скорости.
Эти ходы скорости позволяют осуществлять
изменения ускорения без рывка и тем самым
обеспечить изготовление однородных
9
Параметры движения по траектории 09.01
9
840D
NCU 571
840D
NCU 572
NCU 573
840Di
ООО Siemens 2001 Все права защищены.
9-340 SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01
поверхностей детали.
Выполнение
FNORM
Адрес подачи F обозначает подачу траектории
как постоянную величину по DIN 66025.
Более подробная информация содержится в
руководстве по программированию «Основы
программирования».
FLIN
Ход подачи выполняется от актуальной величины
подачи к запрограммированной F-величине
линейно до конца кадра.
Пример:
N30 F1400 FLIN X50