Руководство по программированию Siemens. Расширенное программирование SINUMERIK 840D/840Di/810D
Подождите немного. Документ загружается.

8
09.01 Коррекция инструмента
8
840D
NCU 572
NCU 573
840Di
ООО Siemens 2001 Все права защищены.
SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01 8-301
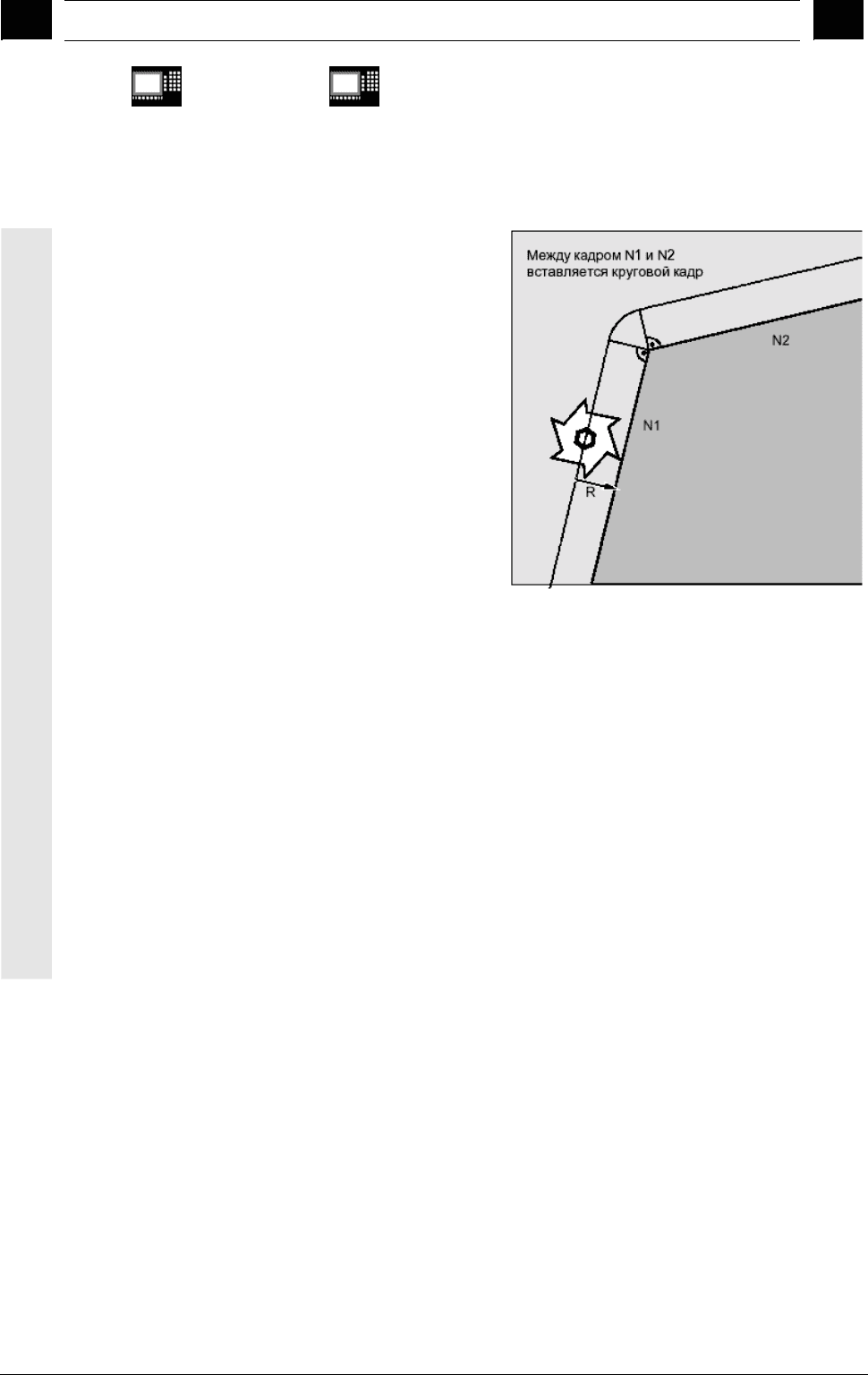
Поведение на внешних углах
На внешнем углу всегда вставляется круговой
кадр с радиусом фрезы.
С помощью программных команд ORIC или ORID
можно установить, будут ли осуществлены
изменения ориентации, запрограммированные
между кадрами N1 и N2, перед началом
вставленного кругового кадра или одновременно
с ним.
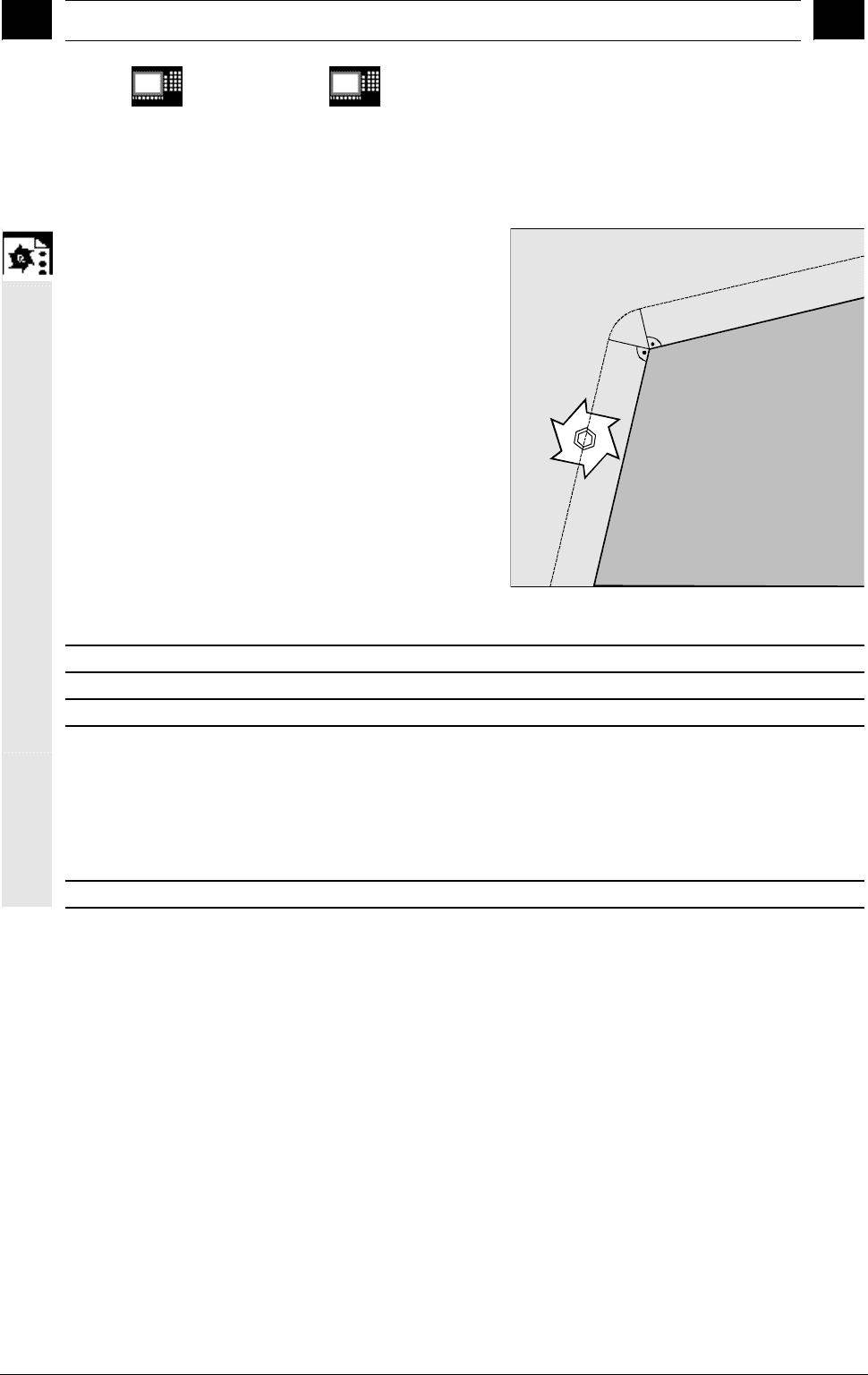
Если на внешних углах необходимо изменение
ориентации, то оно может осуществляться по-
выбору параллельно с интерполяцией или отдельно
с движением по траектории.
При ORID сначала исполняются вставленные
кадры без движения по траектории. Круговой
кадр вставляется непосредственно перед вторым
из двух кадров перемещения, образующих угол.
Если на внешнем углу вставлено несколько
кадров ориентации и включен ORIC, то круговое
движение в соответствии с величинами
изменений ориентации отдельных вставленные
кадров распределяется на них.
8
Коррекция инструмента 09.01
8
840D
NCU 572
NCU 573
840Di
ООО Siemens 2001 Все права защищены.
8-302 SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01
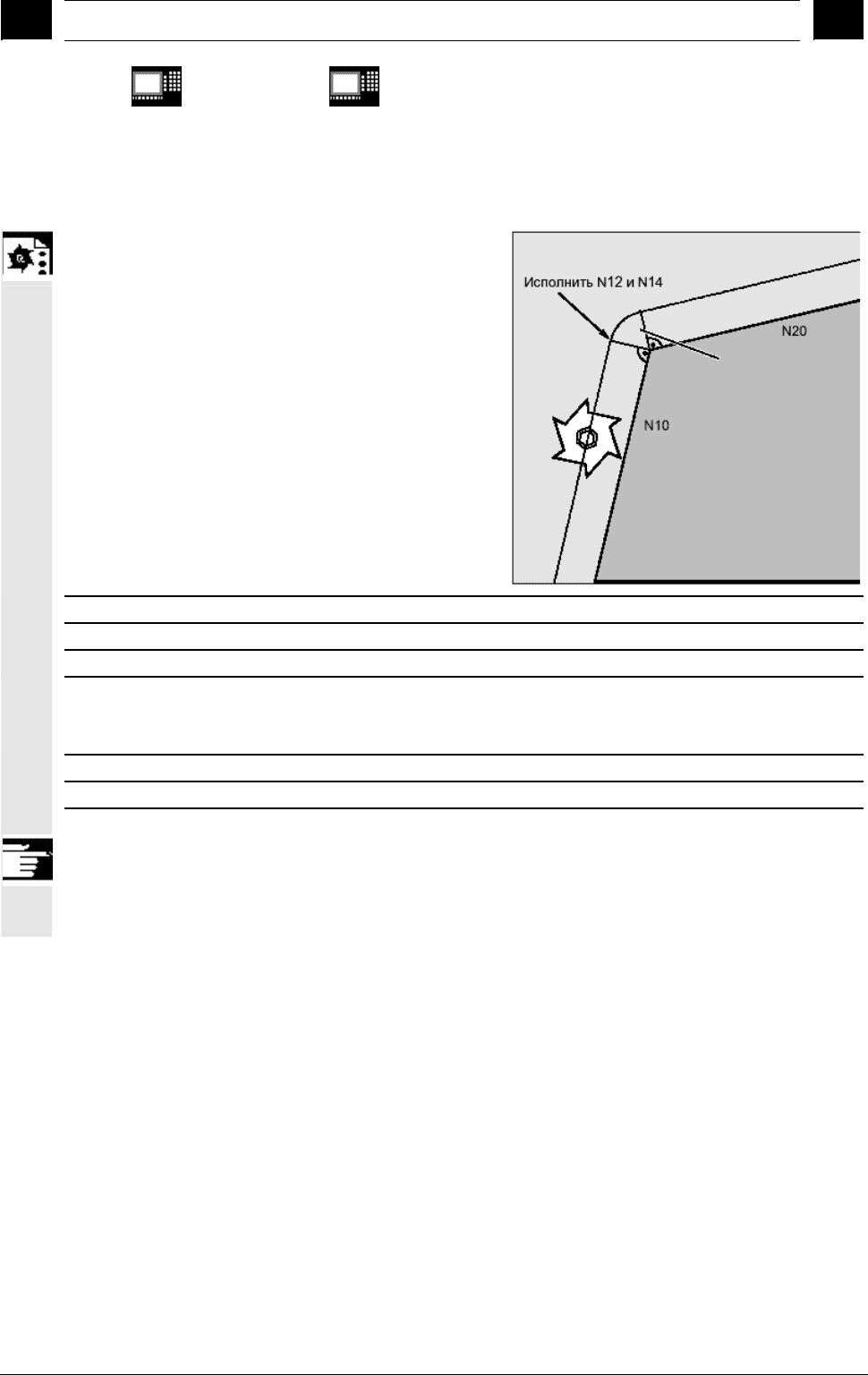
Пример программирования для ORIC
Если между кадрами перемещения N10 и N20
запрограммировано два или более кадра с
изменениями ориентации (к примеру, A2= B2=
C2=) и ORIC активенv, то вставленный круговой
кадр, в соответствии с величиной угловых
изменений, распределяется на эти
промежуточные кадры.
N10
N12
N14
N20
ORIC
N8 A2=… B2=… C2=…
N10 X… Y… Z…
N12 C2=… B2=…
N14 C2=… B2=…
Круговой кадр, вставляемый на внешнем
углу, распределяется на N12 и N14, в
соответствии с изменением ориентации.
Круговое движение и изменение
ориентации при этом осуществляются
параллельно.
N20 X =…Y=… Z=… G1 F200
8
09.01 Коррекция инструмента
8
840D
NCU 572
NCU 573
840Di
ООО Siemens 2001 Все права защищены.
SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01 8-303
Пример программирования для ORID
Если ORID активен, то исполняются все кадры
между обеими кадрами перемещения в конце
первого кадра перемещения. Круговой кадр с
постоянной ориентацией исполняется
непосредственно перед вторым кадром
перемещения.
ORID
N8 A2=… B2=… C2=…
N10 X… Y… Z…
N12 A2=… B2=… C2=…
Кадры N12 и N14 исполняются в конце
N10. После этого выводится круговой
кадр с актуальной ориентацией.
N14 M20
Вспомогательные функции и т.п.
N20 X… Y… Z…
Для вида изменения ориентации на внешнем углу
решающую роль играет программная команда,
которая активная в первом кадре перемещения
внешнего угла.
8
Коррекция инструмента 09.01
8
840D
NCU 572
NCU 573
840Di
ООО Siemens 2001 Все права защищены.
8-304 SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01
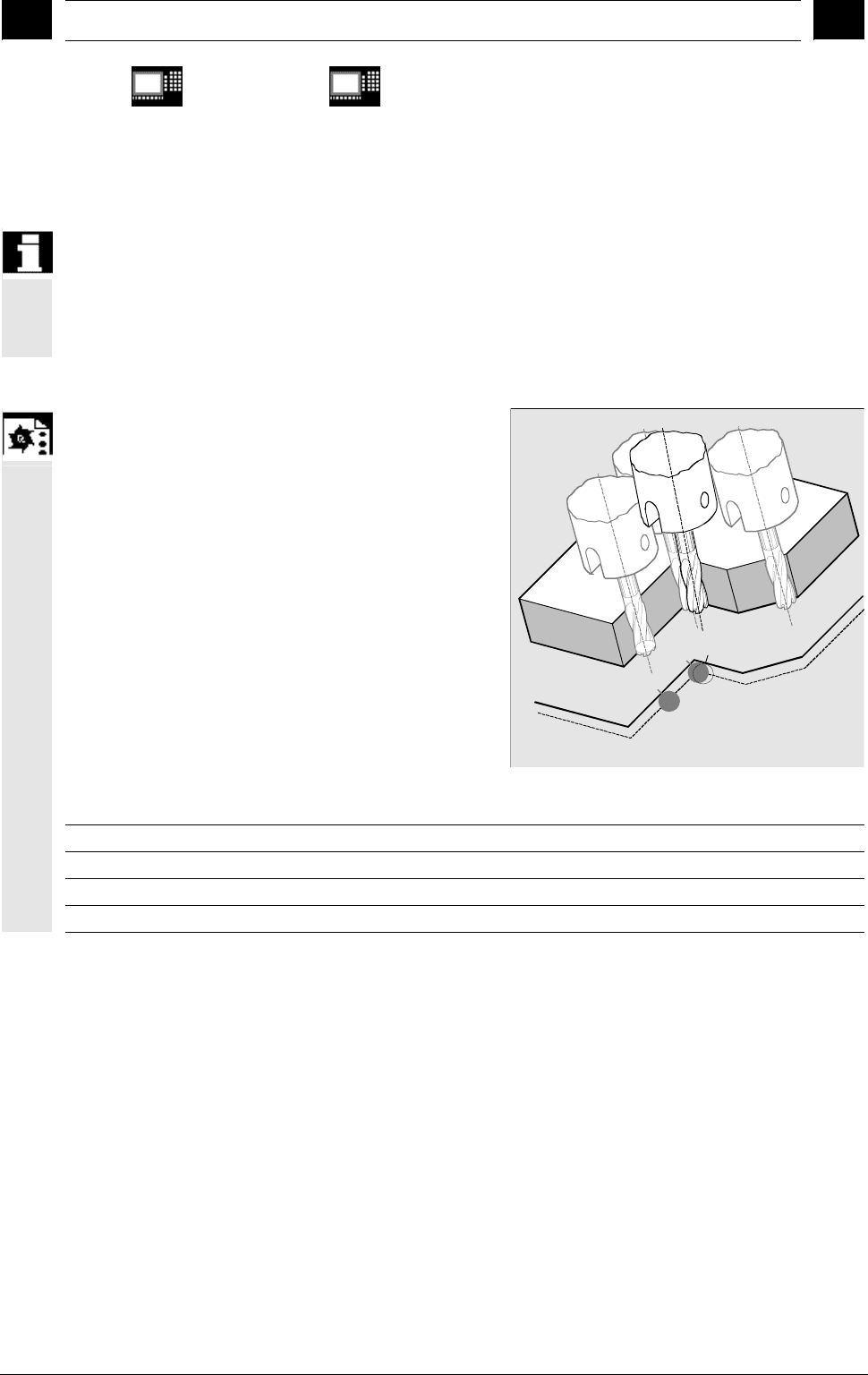
Без изменения ориентации
Если ориентация на границе кадра не
изменяется, то поперечным сечением
инструмента является круг, касающийся обеих
контуров.
Пример программирования
Изменение ориентации на внутреннем углу.
WRK
N10
N12
N15
ORIC
N10 X …Y… Z… G1 F500
N12 X …Y… Z… A2=… B2=…, C2=…
N15 X Y Z A2 B2 C2
8
09.01 Коррекция инструмента
8
840D
NCU 572
NCU 573
840Di
ООО Siemens 2001 Все права защищены.
SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01 8-305
8.7 Свободное распределение D-номеров, номера резцов CE (от ПО 5)
Начиная с ПО 5 D-номера могут использоваться
как номера коррекции. Дополнительно через
адрес СЕ может осуществляться адресация
номера резца.
Через системный параметр $TC_DPCE номер
резца может быть описан.
Предварительная установка: номер коррекции ==
номер резца.
Литература: FB, W1 (коррекция инструмента)
Изготовитель станка (MH 8.12)
Через машинные данные определяется
максимальное количество D-номеров (номеров
резцов) и максимальное количество резцов на
инструмент. Следующие команды имеют смысл
только тогда, когда максимальный номер резцов
(MD 18105) был определен большим, чем
количество резцов на инструмент (MD 18106).
Следовать указаниям изготовителя станка.
Прочие указания
Наряду с относительным распределением D-
номеров D-номера могут также распределяться
как 'плоские' или 'абсолютные' D-номера (1-
32000) без связи с T-номером (внутри функции
'плоская структура D-номеров).
8
Коррекция инструмента 09.01
8
840D
NCU 572
NCU 573
840Di
ООО Siemens 2001 Все права защищены.
8-306 SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01
8.7.1 Проверка D-номеров (CHKDNO)
Программирование
state=CHKDNO(Tno1,Tno2,Dno)
Объяснение параметров
state
TRUE: Однозначная задача D-номеров для проверенного
диапазона.
FALSE:
Произошел конфликт D-номеров или
Параметрирование недействительно. Через Tno1, Tno2
и Dno передаются параметры, которые приводят к
конфликту. Эти данные могут быть обработаны в
программе обработки деталей.
CHKDNO(Tno1,Tno2)
Проверяются все D-номера названных инструментов.
CHKDNO(Tno1)
Проверяются все D-номера Tno1 по отношению к другим
инструментам.
CHKDNO
Проверяются все D-номера всех инструментов по отношению к
всем другим инструментам.
Функция
С помощью CKKDNO проверяется,
распределены ли имеющиеся D-номера
однозначно.
D-номера определенных внутри TO-единицы
инструментов могут встречаться только один раз.
Запасной инструмент при этом не учитывается.
8
09.01 Коррекция инструмента
8
840D
NCU 572
NCU 573
840Di
ООО Siemens 2001 Все права защищены.
SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01 8-307
8.7.2 Переименование D-номеров (GETDNO, SETDNO)
Программирование
d = GETDNO(t,ce)
state = SETDNO(t,ce,d)
Объяснение параметров
d
D-номер резца инструмента
t
T-номер инструмента
ce
Номера резцов (CE-номера) инструмента
state
Указывает, может ли команда быть выполнена без ошибок (TRUE или
FALSE).
Функция
GETDNO
Эта команда подает D-номер определенного
резца (ce) инструмента с T-номером t.
Если D-номер к введенным параметрам не
существует, то устанавливается d=0. Если
D-номер не действителен, то возвращается
величина больше 32000.
SETDNO
С помощью этой команды присваивается
величина d D-номеру резца ce инструмента t.
Через state возвращается результат этого
оператора (TRUE или FALSE)
Если блок данных к введенным параметрам
отсутствует, то возвращается FALSE. Ошибки
синтаксиса вызывают тревогу. D-номер не может
быть явно установлен на 0.
Пример: (переименование D-номера)
$TC_DP2[1,2] = 120
$TC_DP3[1,2] = 5.5
$TC_DPCE[1,2] = 3; Schneidennummer CE
...
N10 def int DNrAlt, DNrNeu = 17
N20 DNrAlt = GETDNO(1,3)
N30 SETDNO(1,3,DNrNeu)
8
Коррекция инструмента 09.01
8
840D
NCU 572
NCU 573
840Di
ООО Siemens 2001 Все права защищены.
8-308 SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01
Таким образом резцу CE=3 присваивается новая
D-величина 17.
Теперь данные этого резца запрашиваются через
D-номер 17; как через системные параметры, так
и в программировании с NC-адресом.
Прочие указания
D-номера должны быть распределены
однозначно. Два различных резца одного
инструмента не могут иметь один и тот же D-
номер.
8.7.3 Определение T-номера для заданного D-номера (GETACTTD)
Программирование
status = GETACTTD(Tnr, Dnr)
Объяснении параметров
Dnr
D-номер, для которого должен быть найден T-номер.
Tnr
Найденный T-номер
status
0: T-номер был найден. Tnr получает значение T-номера.
-1: Для указанного D-номера T-номер не существует; Tnr=0.
-2: D-номер не является абсолютным. Tnr получает значение первого
найденного инструмента, содержащего D-номер со значением Dnr.
-5: Функция не может быть выполнена по иной причине.
Функция
С помощью GETACTTD для абсолютного
D-номера определяется соответствующий T-
номер. Проверка однозначности не
осуществляется. Если существует несколько
одинаковых D-номеров внутри TO-единицы, то
возвращается T-номер первого найденного
инструмента. При использовании ’плоских’
D-номеров использование команды не имеет
смысла, так как здесь всегда возвращается
величина 1 (нет T-номера в сохранении данных).
8
09.01 Коррекция инструмента
8
840D
NCU 572
NCU 573
840Di
ООО Siemens 2001 Все права защищены.
SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01 8-309
8.7.4 Установка D-номеров недействительными
Программирование
DZERO
Объяснение
DZERO
Обозначает все D-номера TO-единицы как недействительные
Функция
Команда служит для поддержки при
переоборудовании.
Обозначенные таким образом блоки данных
коррекции более не проверяются языковой
командой CHKDNO.
Чтобы сделать их снова доступными,
необходимо снова установить D-номер с
помощью SETDNO.
8
Коррекция инструмента 09.01
8
840D
NCU 572
NCU 573
840Di
ООО Siemens 2001 Все права защищены.
8-310 SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01
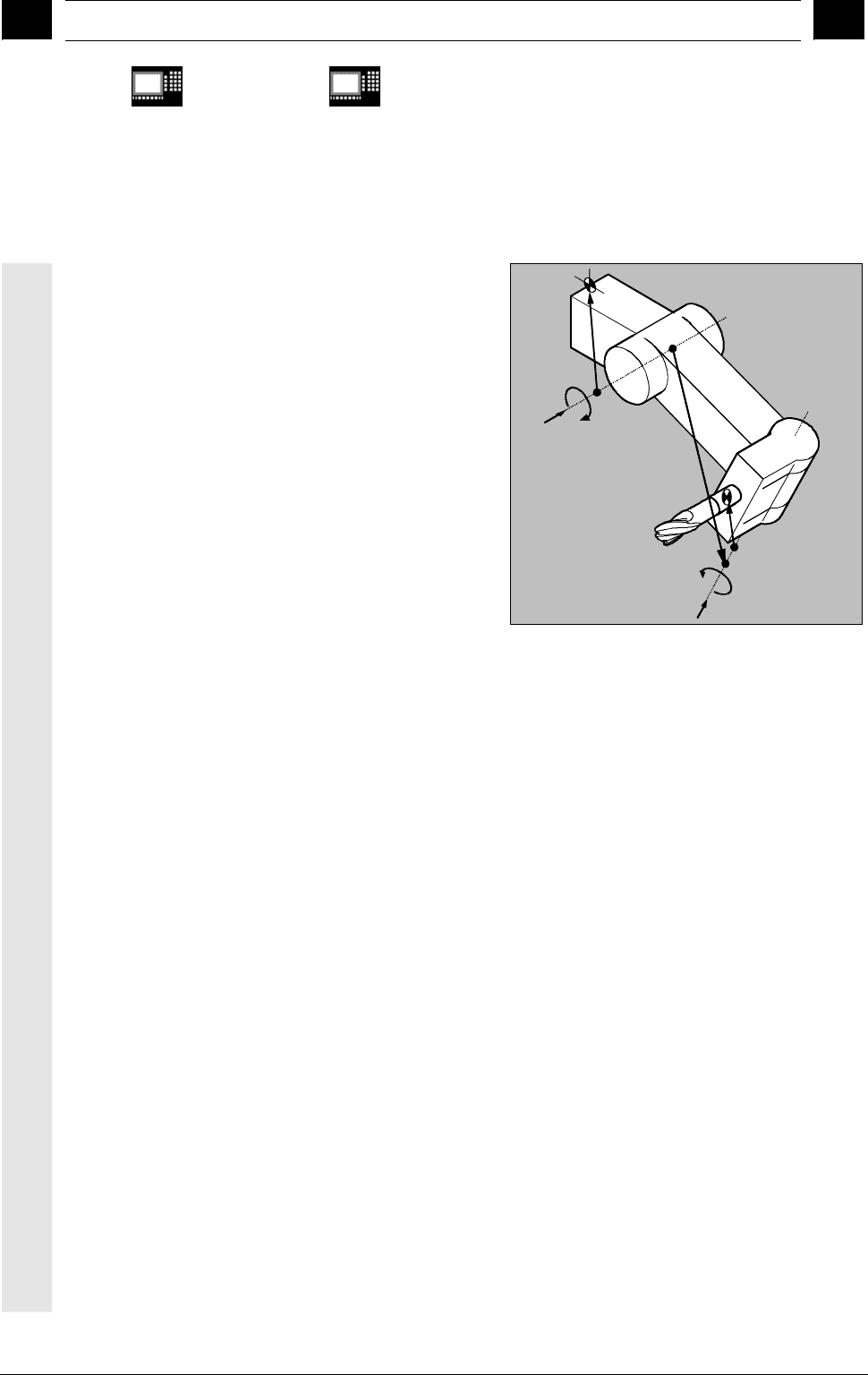
8.8 Кинематика держателя инструмента
Кинематика держателя инструмента с максимум
двумя осями вращения описывается с помощью 17
системных переменных $TC_CARR1[m] до
$TC_CARR17[m] (см. также руководство по
программированию “Расширенное
программирование”). Описание держателя
инструмента состоит из:
• векторного расстояния от первой оси вращения
до опорной точки держателя инструмента l
1
,
векторного расстояния от первой до второй оси
вращения l
2
, векторного расстояния от второй
оси вращения до опорной точки инструмента l
3
.
• векторов направления обеих осей вращения v
1
,
v
2
.
• углов поворота α
1
, α
2
вокруг обеих осей. Углы
поворота подсчитываются положительно с
направлением взгляда в направлении векторов
оси вращения по часовой стрелке.
Подвижная кинематика от ПО 5.3
Для станков с подвижной кинематикой (как
инструмент, так и деталь вращаются) к системным
переменным добавляются $TC_CARR18[m] до
$TC_CARR23[m] и они описываются следующим
образом:
Вращающийся стол состоит из:
• векторного расстояния второй оси вращения v
2
до опорной точки вращающегося стола I
4
третьей
оси вращения.
Круговые оси состоят из:
• обеих идентификаторов каналов для отношения
осей вращения v
1
и v
2
, к позициям которых
осуществляется обращение при необходимости
определения ориентации ориентируемого
держателя инструмента.
Тип кинематики с одной из величин T, P или M:
• тип кинематики T: вращается только
V
1
V
2
α
1
α
2
l
1
l
2
l
3