Руководство по программированию Siemens. Расширенное программирование SINUMERIK 840D/840Di/810D
Подождите немного. Документ загружается.

7
09.01 Трансформации
7
ООО Siemens 2001 Все права защищены.
SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01 7-231
Трансформации
7.1 Трех-, четырех- и пятиосевая трансформация: TRAORI ......................................... 7-232
7.1.1 Программирование ориентации инструмента..................................................... 7-235
7.1.2 Соотношение осей ориентации - ORIWKS, ORIMKS ......................................... 7-240
7.1.3 Сингулярные позиции и их обработка ................................................................. 7-241
7.1.4 Оси ориентации (от ПО 5.2).................................................................................. 7-242
7.1.5 Декартово PTP-перемещение (от ПО 5.2)........................................................... 7-245
7.2 Фрезерная обработка токарных деталей: TRANSMIT.............................................. 7-250
7.3 Трансформация боковой поверхности цилиндра: TRACYL..................................... 7-253
7.4 Наклонная ось: TRAANG............................................................................................. 7-259
7.4.1 Программирование наклонной оси: G05, G07 (от ПО 5.3) ................................. 7-263
7.5 Граничные условия при выборе трансформации ..................................................... 7-265
7.6 Отключение трансформации: TRAFOOF .................................................................. 7-267
7.7 Связанные трансформации........................................................................................ 7-268
7.8 Переключаемые геометрические оси, GEOAX ......................................................... 7-271
7
Трансформации 09.01
7
840D
NCU 572
NCU 573
840Di
ООО Siemens 2001 Все права защищены.
7-232 SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01
7.1 Трех-, четырех- и пятиосевая трансформация: TRAORI
Для обеспечения оптимального режима резания
при обработке пространственно искривленных
плоскостей угол установки инструмента должен
быть изменяемым.
С помощью какой конструкции станка это
достигается, зафиксировано в осевых данных.
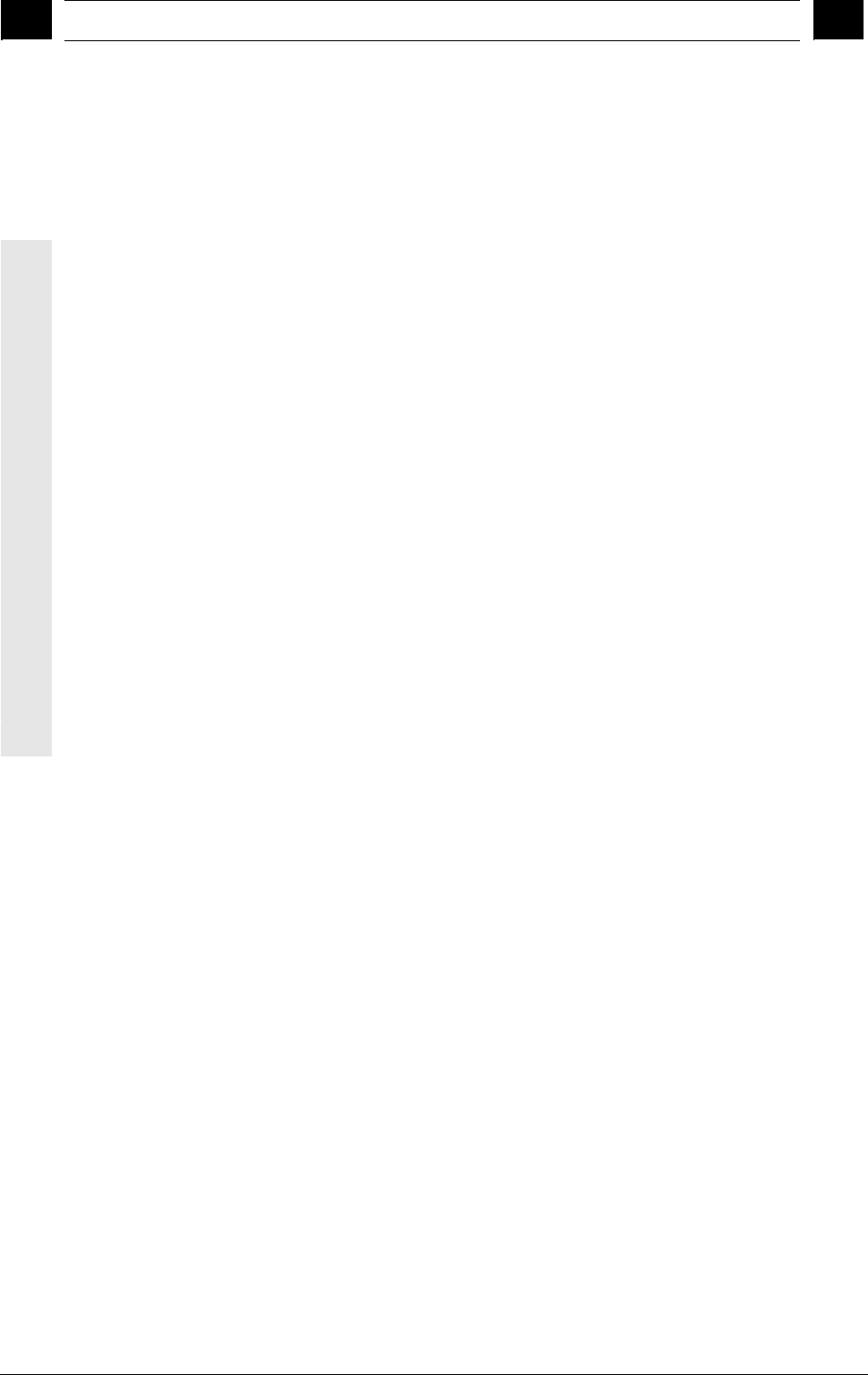
Карданная инструментальная головка
Здесь три линейные оси (X, Y, Z) и две оси
ориентации определяют угол установки
инструмента. Одна из двух осей ориентации
устанавливается как наклонная ось, здесь в
примере A' – во многих случаях как установка
45°.
Осевая последовательность осей ориентации и
направление ориентации инструмента
устанавливаются в зависимости от кинематики
станка через машинные данные. На
изображенных здесь примерах расположения
представлены на примере кинематики станка CA!
7
09.01 Трансформации
7
840D
NCU 572
NCU 573
840Di
ООО Siemens 2001 Все права защищены.
SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01 7-233
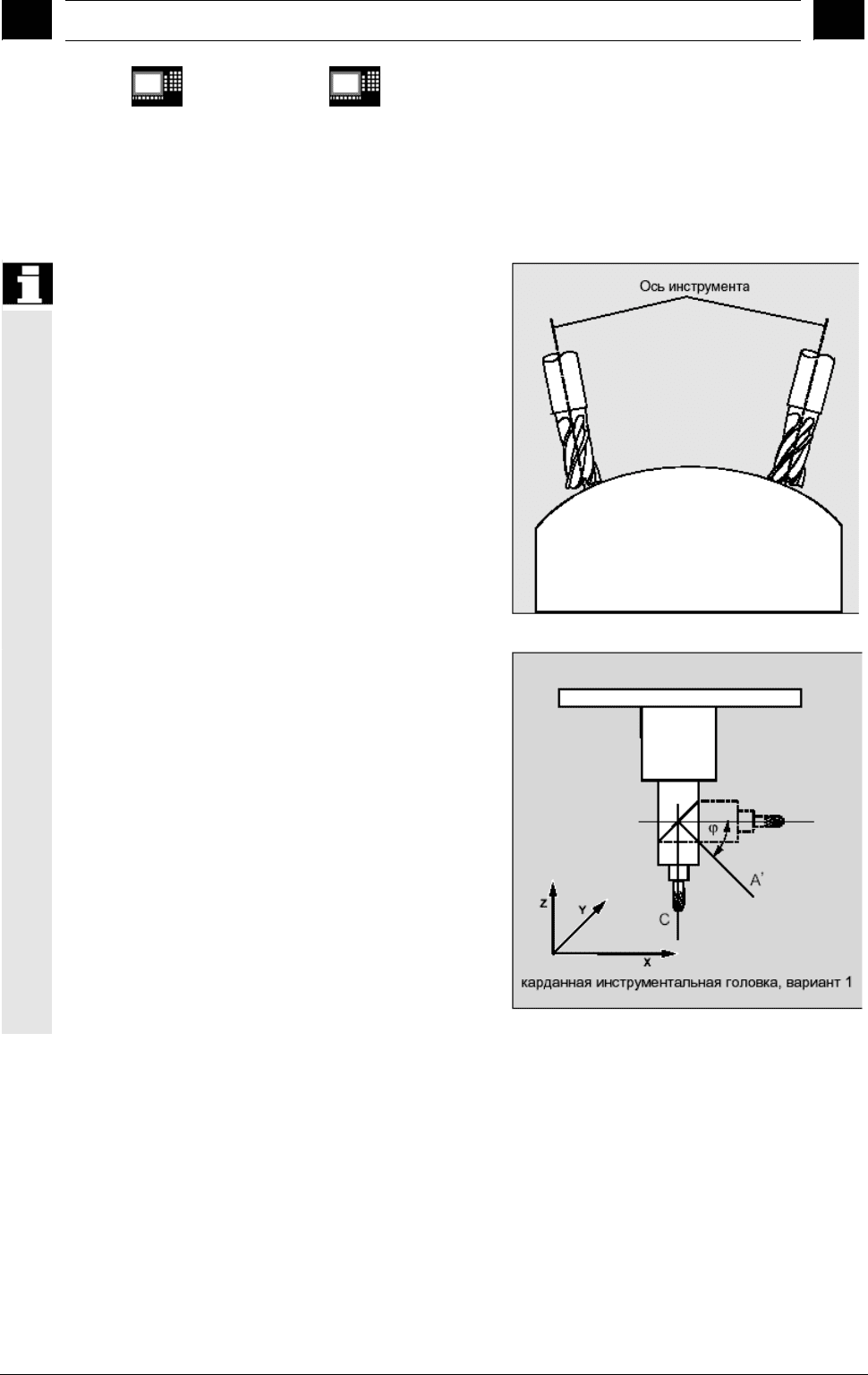
Действуют следующие возможные связи:
A' лежит под углом ϕ к X-оси
B' лежит под углом ϕ к X-оси
C' лежит под углом ϕ к X-оси
Угол ϕ может проектироваться в диапазоне 0° до
+89° через машинные данные.
В зависимости от выбранного направления
ориентации инструмента активная рабочая
плоскость (G17, G18, G19) должна быть
установлена в NC-программе таким образом,
чтобы продольная коррекция инструмента
действовала в направлении ориентации
инструмента.
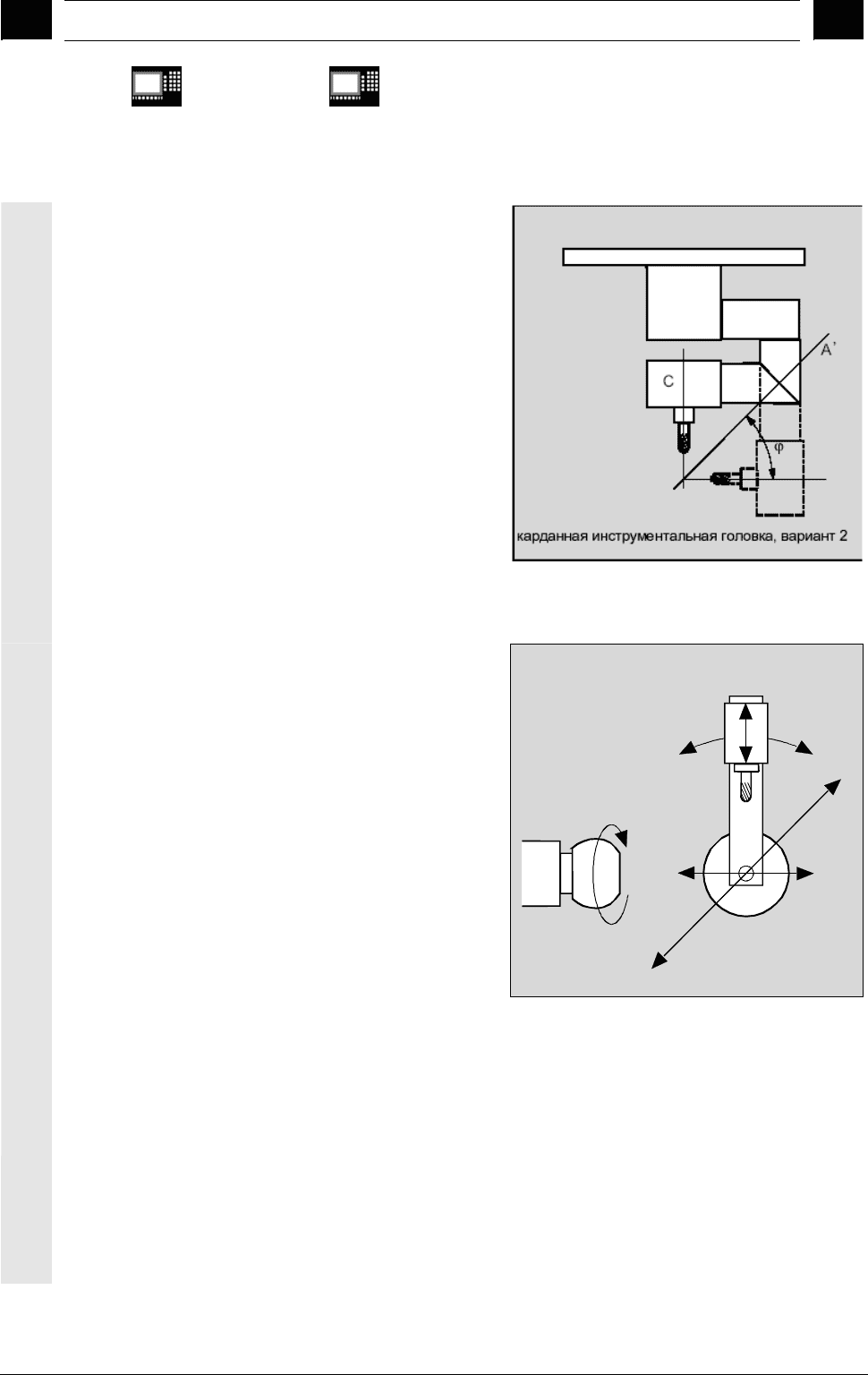
Трансформация с поворотной линейной осью
Здесь речь идет о схеме с подвижной деталью и
подвижным инструментом.
Кинематика состоит из трех линейных осей
(X, Y, Z) и двух расположенных под прямым
углом осей вращения. Первая круговая ось, к
примеру, приводится в движение через крестовой
суппорт двумя линейными осями, инструмент
расположен параллельно третьей линейной оси.
Вторая ось вращения поворачивает деталь.
Третья линейная ось (ось качания) находится на
уровне крестового суппорта.
Осевая последовательность поворотных осей и
направление ориентации инструмента
устанавливается в зависимости от кинематики
станка через машинные данные.
Действуют следующие возможные связи:
B
A
Z
Y
X
Оси: Осевые последовательности:
1. Круговая ось A A B B C C
2. Круговая ось B C A C A B
Поворотная линейная ось Z Y Z X Y X

7
Трансформации 09.01
7
840D
NCU 572
NCU 573
840Di
ООО Siemens 2001 Все права защищены.
7-234 SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01
3- х и 4-х осевые трансформации
Программирование
TRAORI(n)
TRAFOOF
Объяснение команд
TRAORI
Активизирует первую согласованную трансформацию ориентации
TRAORI(n)
Активизирует согласованную с помощью n трансформацию
ориентации
n
Номер трансформации (n = 1 или 2), TRAORI(1) соответствует
TRAORI
TRAFOOF
Выключить трансформацию
Прочие указания
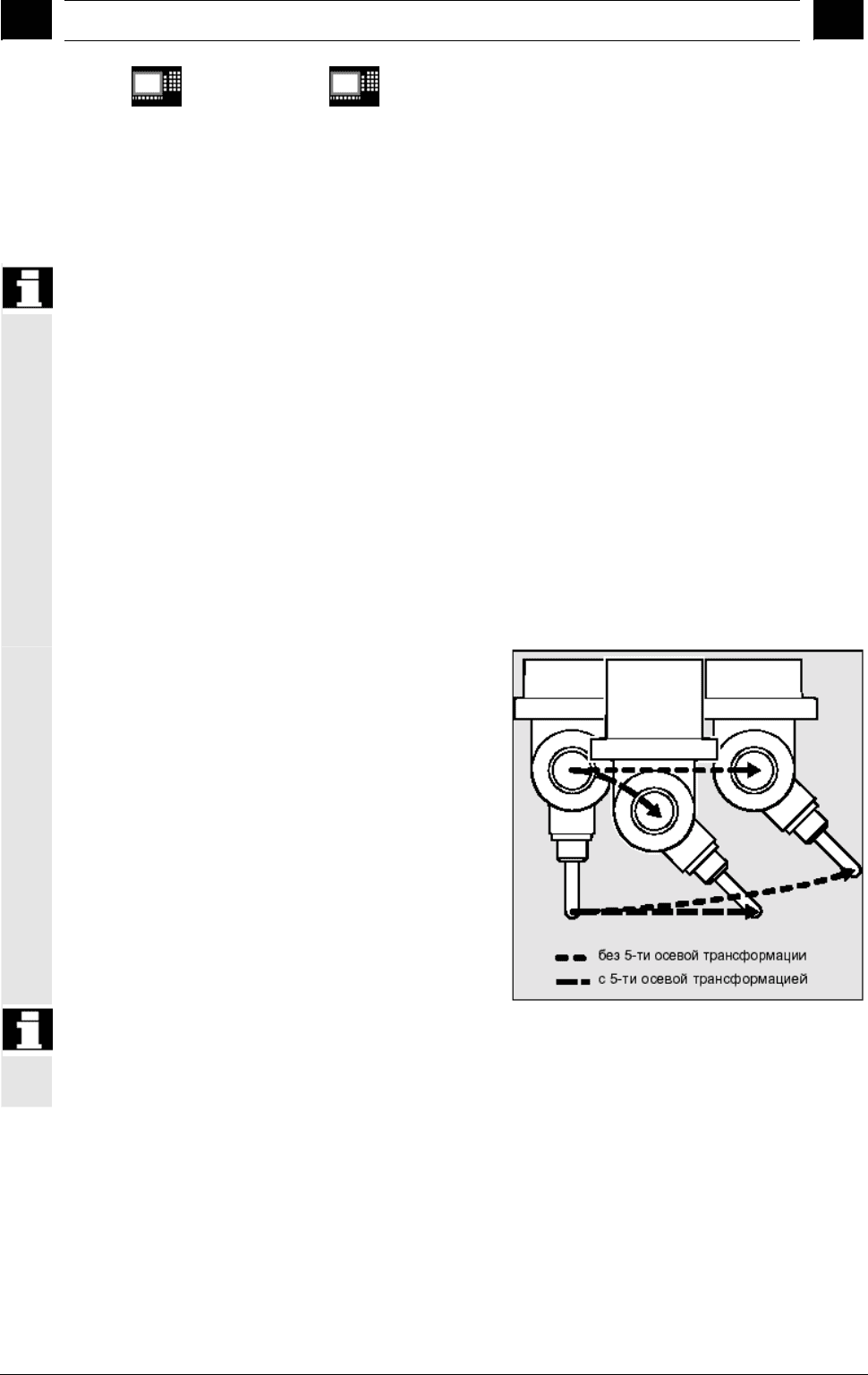
После включения трансформации данные
позиции (X, Y, Z) всегда относятся к острию
инструмента.
Изменение позиций участвующих в
трансформации круговых осей приводит к таким
компенсационным движениям других осей
станка, что позиция острия инструмента остается
неизменной.
7
09.01 Трансформации
7
840D
NCU 572
NCU 573
840Di
ООО Siemens 2001 Все права защищены.
SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01 7-235
7.1.1 Программирование ориентации инструмента
Как правило, 5-ти осевые программы создаются
CAD/CAM-системами и не задаются на СЧПУ.
Поэтому следующие объяснения относятся
прежде всего к программистам постпроцессоров.
Для программирования ориентации инструмента
имеется 3 возможности:
1. Программирование движения круговых осей.
Изменение ориентации всегда
осуществляется в базовой кинематической
системе или в системе координат станка. Оси
ориентации перемещаются как синхронные
оси.
2. Программирование эйлеровых углов или RPY-
углов через A2, B2, C2
или
программирование вектора направления
через A3, B3, C3. Вектор направления
направлен от острия инструмента в сторону
крепления инструмента.
3. Программирование через угол предварения
LEAD и
боковой угол TILT (торцовое фрезерование).
Во всех случаях программирование ориентации
допускается только при включенной
трансформации ориентации.
Преимущество: Эти программы могут
применяться к любой кинематике станка.
7
Трансформации 09.01
7
840D
NCU 572
NCU 573
840Di
ООО Siemens 2001 Все права защищены.
7-236 SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01
Программирование
G1 X Y Z A B C
Программирование движения круговых осей
G1 X Y Z A2= B2= C2=
Программирование эйлеровых углов
G1 X Y Z A3= B3= C3=
Программирование вектора направления
G1 X Y Z A4= B4= C4=
Программирование вектора нормалей плоскостей
в начале кадра
G1 X Y Z A5= B5= C5=
Программирование вектора нормалей плоскостей
в конце кадра
LEAD
Угол предварения для программирования
ориентации инструмента
TILT
Боковой угол для программирования ориентации
инструмента
Через машинные данные можно переключаться
между эйлеровыми и RPY-углами.
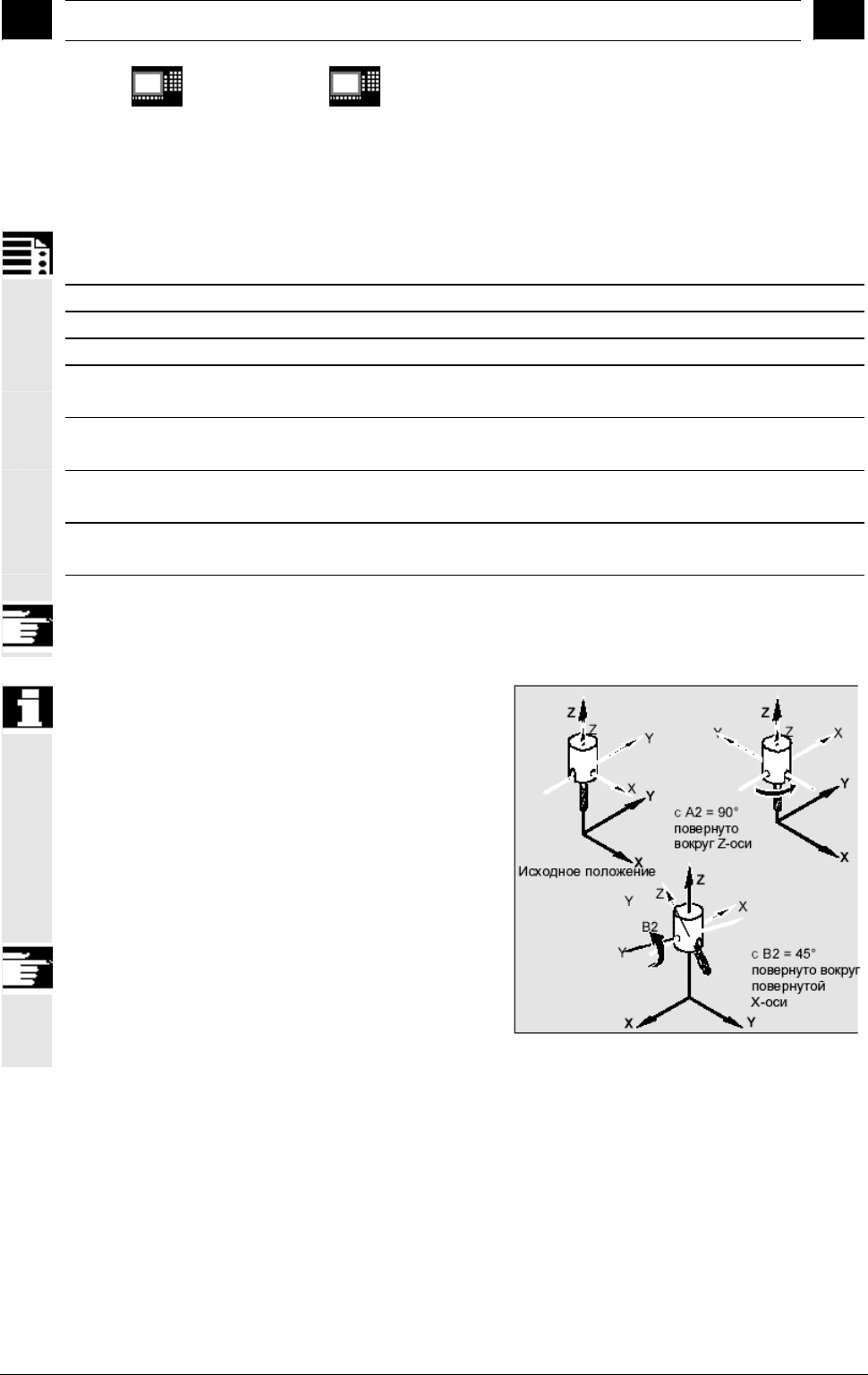
Программирование в эйлеровых углах
Запрограммированные при программировании
ориентации с помощью A2, B2, C2 величины
интерпретируются как эйлеровы углы (в
градусах).
Для получения вектора ориентации сначала
вектор в Z-направлении с помощью А2
поворачивается вокруг Z-оси, потом с помощью
В2 вокруг новой Х-оси и в завершении с помощью
С2 вокруг новой Z-оси.
В этом случае значение C2 (вращение вокруг
новой Z-оси) не имеет значения и не должно
программироваться.
7
09.01 Трансформации
7
840D
NCU 572
NCU 573
840Di
ООО Siemens 2001 Все права защищены.
SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01 7-237
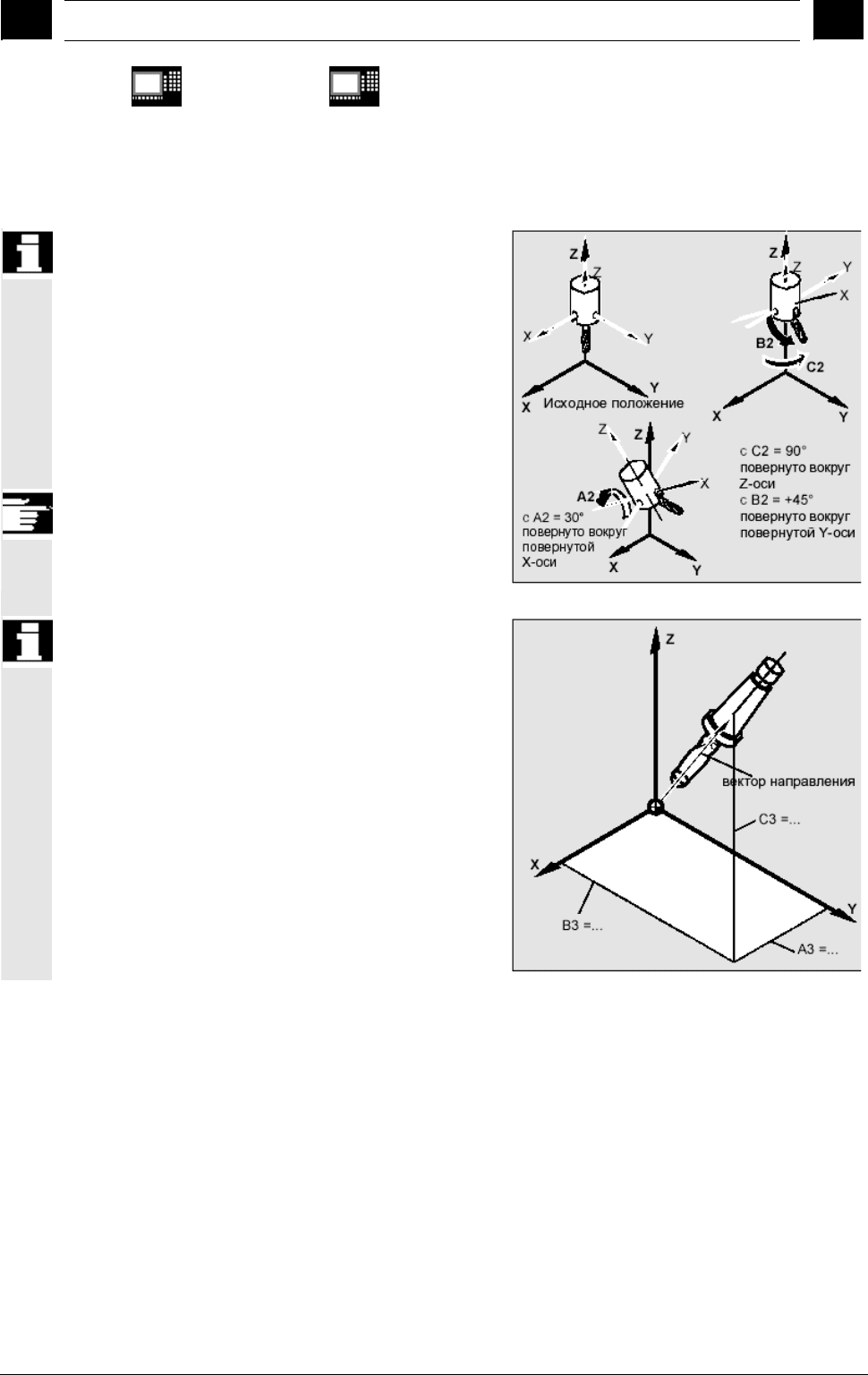
Программирование в RPY-углах
Запрограммированные при программировании
ориентации с помощью A2, B2, C2 величины
интерпретируются как RPY-углы (в градусах).
Для получения вектора ориентации сначала
вектор в Z-направлении с помощью С2
поворачивается вокруг Z-оси, потом с помощью
В2 вокруг новой Y-оси и в завершении с помощью
A2 вокруг новой Х-оси..
В отличии от программирования эйлеровых углов
здесь все три значения влияют на вектор
ориентации.
Программирование вектора направления
Компоненты вектора направления
программируются с помощью A3, B3, C3. Вектор
показывает в направлении крепления
инструмента; длина вектора при этом не имеет
значения.
Не запрограммированные компоненты вектора
устанавливается равными нулю.
7
Трансформации 09.01
7
840D
NCU 572
NCU 573
840Di
ООО Siemens 2001 Все права защищены.
7-238 SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01
Торцовое фрезерование
Торцовое фрезерование служит для обработки
поверхностей с любым искривлением.
Для этого вида 3D-фрезы необходимо
построчное описание 3D-траекторий на
поверхности детали.
Вычисления осуществляются с учетом формы
инструмента и размеров инструмента – обычно в
CAM.
Готовые вычисленные NC-кадры после через
постпроцессоры считываются в СЧПУ.
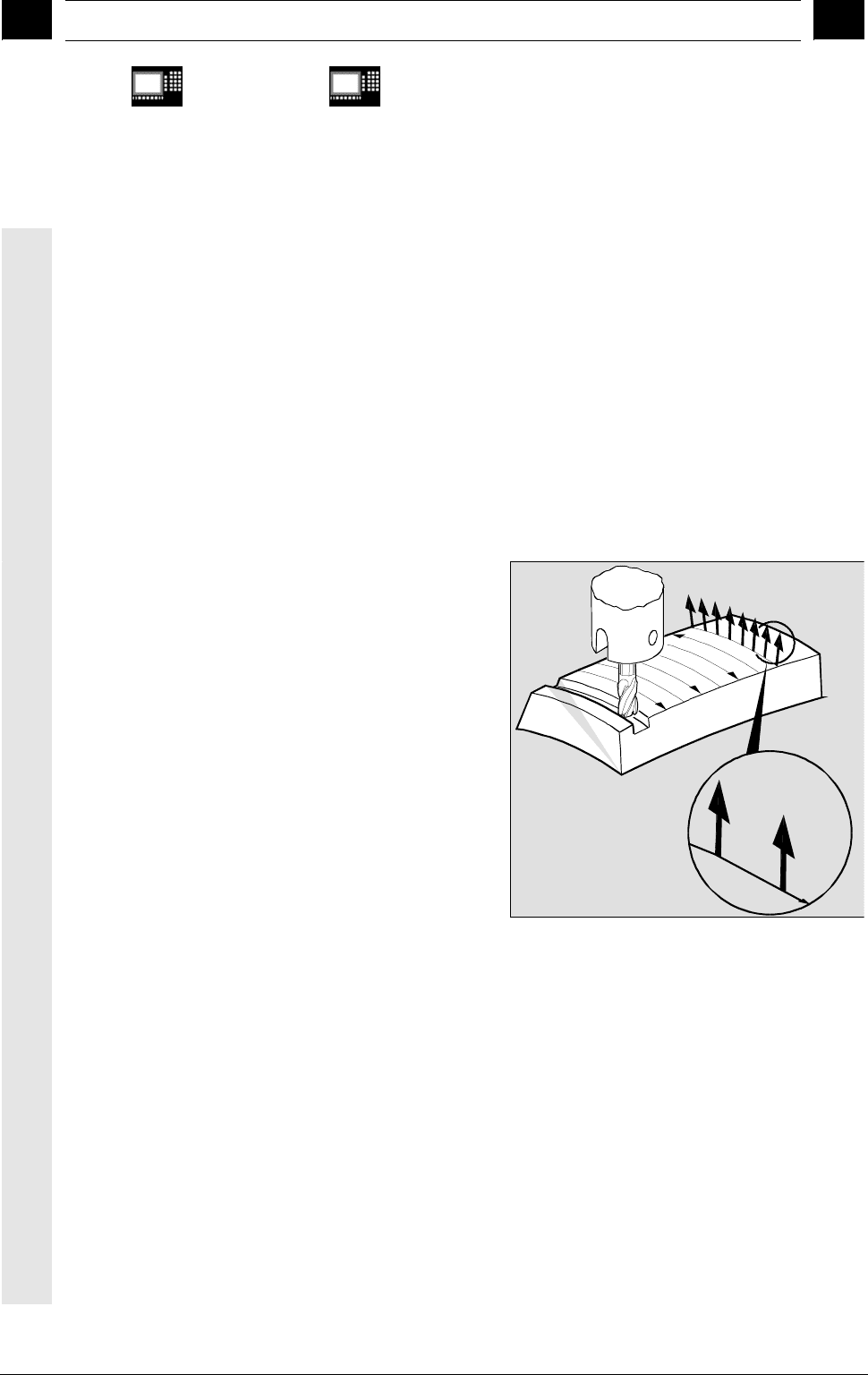
Описание плоскостей
Описание изгиба траектории осуществляется
через векторы нормалей плоскостей со
следующими компонентами:
A4, B4, C4 стартовый вектор в начале кадра
A5, B5, C5 конечный вектор в конце кадра
Если в кадре находится только стартовый вектор,
то вектор нормалей плоскостей остается
постоянным на всем кадре.
Если в кадре находится только конечный вектор,
то осуществляется интерполяция от конечной
величины предыдущего кадра через большую
круговую интерполяцию к запрограммированной
конечной величине.
Если запрограммированы стартовый и конечный
векторы, то интерполяция между двумя
направлениями также осуществляется через
большую круговую интерполяцию. Благодаря
этому могут создаваться постоянно ровные пути
траектории.
В исходном положении векторы нормалей
плоскостей показывают – независимо от
активной плоскости G17 до G19 – в Z-
направлении.
A4
B4
C4
A5
B5
C5
7
09.01 Трансформации
7
840D
NCU 572
NCU 573
840Di
ООО Siemens 2001 Все права защищены.
SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01 7-239
Длина вектора не имеет значения.
Не запрограммированные компоненты вектора
устанавливаются на ноль.
При активном ORIWKS (см. следующие
страницы) векторы нормалей плоскостей
относятся к активному фрейму и вращаются при
вращении фрейма.
Вектор нормалей плоскостей должен находится
внутри устанавливаемой через машинные
данные предельной величины вертикально к
касательной к траектории, в ином случае
сигнализируется тревога.
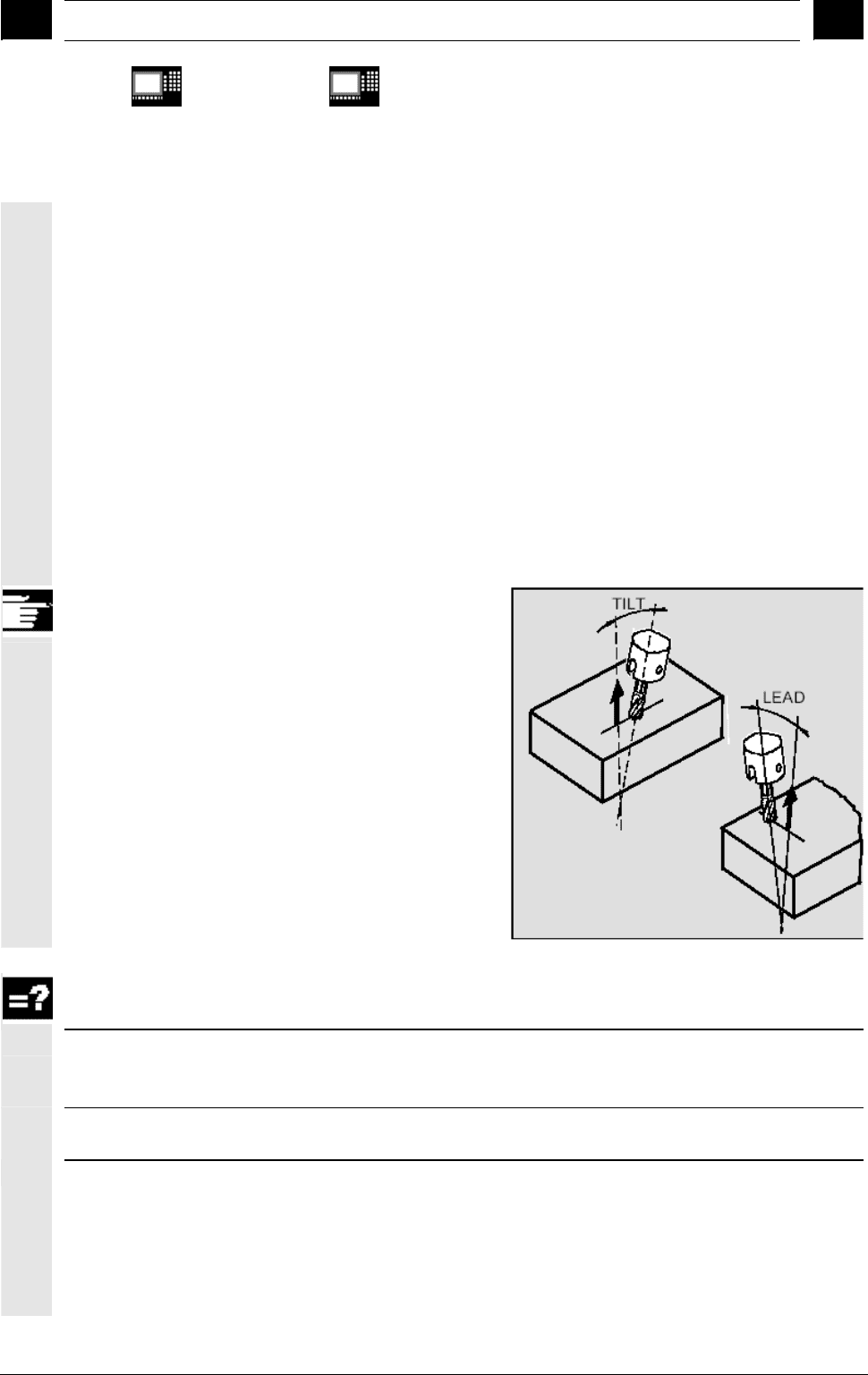
Программирование ориентации инструмента с
помощью LEAD и TILT
Результирующая ориентация инструмента
получается из:
− касательной к траектории,
− вектора нормалей плоскостей
− угла предварения LEAD
− бокового угла TILT на конце кадра
Объяснение команд
LEAD
угол относительно вектора нормалей плоскостей, в плоскости,
образованной касательной к траектории и вектором нормалей
плоскостей
TILT
угол в плоскости, вертикально к касательной к траектории
относительно вектора нормалей плоскостей
Поведение при внутренних углах (для 3D-
WZK)
Если кадр укорачивается на внутреннем угле, то
результирующая ориентация инструмента также
достигается на конце кадра.

7
Трансформации 09.01
7
840D
NCU 572
NCU 573
840Di
ООО Siemens 2001 Все права защищены.
7-240 SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01
7.1.2 Соотношение осей ориентации - ORIWKS, ORIMKS
Программирование
N.. ORIMKS
или
N.. ORIWKS
Объяснение команд
ORIMKS
вращение в системе координат станка
ORIWKS
вращение в системе координат детали
Функция
При программировании ориентации в системе
координат детали через эйлеров или RPY-угол
или вектор ориентации можно установить ход
вращательного движения через
ORIMKS/ORIWKS.
Выполнение
У ORIMKS выполненное движение инструмента
зависит от кинематики станка. При изменении
ориентации с фиксированным в пространстве
острием инструмента осуществляется линейная
интерполяция между позициями круговых осей.
У ORIWKS движение инструмента не зависит от
кинематики станка. При изменении ориентации с
фиксированным в пространстве острием
инструмента инструмент движется в плоскости,
образованной начальным и конечным вектором.