Руководство по программированию Siemens. Расширенное программирование SINUMERIK 840D/840Di/810D
Подождите немного. Документ загружается.

6
09.01 Фреймы
6
840D
NCU 571
840D
NCU 572
NCU 573
810D
840Di
ООО Siemens 2001 Все права защищены.
SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01 6-211
Соединение целых фреймов
Целый фрейм может быть подчинен другому
фрейму.
Программирование (примеры)
DEF FRAME EINSTELLUNG1
EINSTELLUNG1=CTRANS(X,10)
$P_PFRAME=EINSTELLUNG1
DEF FRAME EINSTELLUNG4
EINSTELLUNG4=$P_PFRAME
$P_PFRAME=EINSTELLUNG4
Актуальному программируемому
фрейму присваиваются величины
фрейма EINSTELLUNG1,
определенного пользователем.
Актуальный программируемый фрейм
архивируется и при необходимости
снова разархивируется.
Прочие указания
Диапазон значений для поворота RT
Поворот вокруг 1-ой геометрической оси: –180° до +180°
Поворот вокруг 2-ой геометрической оси: –89.999° до +90°
Поворот вокруг 3-ей геометрической оси: –180° до +180°
Цепочки фреймов
Программирование (примеры)
$P_IFRAME=$P_UIFR[15]:$P_UIFR[16]
$P_UIFR[3]=$P_UIFR[4]:$P_UIFR[5]
$P_UIFR[15] содержит, к примеру,
данные для смещений нулевой точки.
После этого – дополнительно –
обрабатываются данные из
$P_UIFR[16], к примеру, данные для
вращений.
Настраиваемый фрейм 3 создается
связыванием настраиваемых фреймов
4 и 5.
6
Фреймы 09.01
6
840D
NCU 571
840D
NCU 572
NCU 573
810D
840Di
ООО Siemens 2001 Все права защищены.
6-212 SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01
Функция
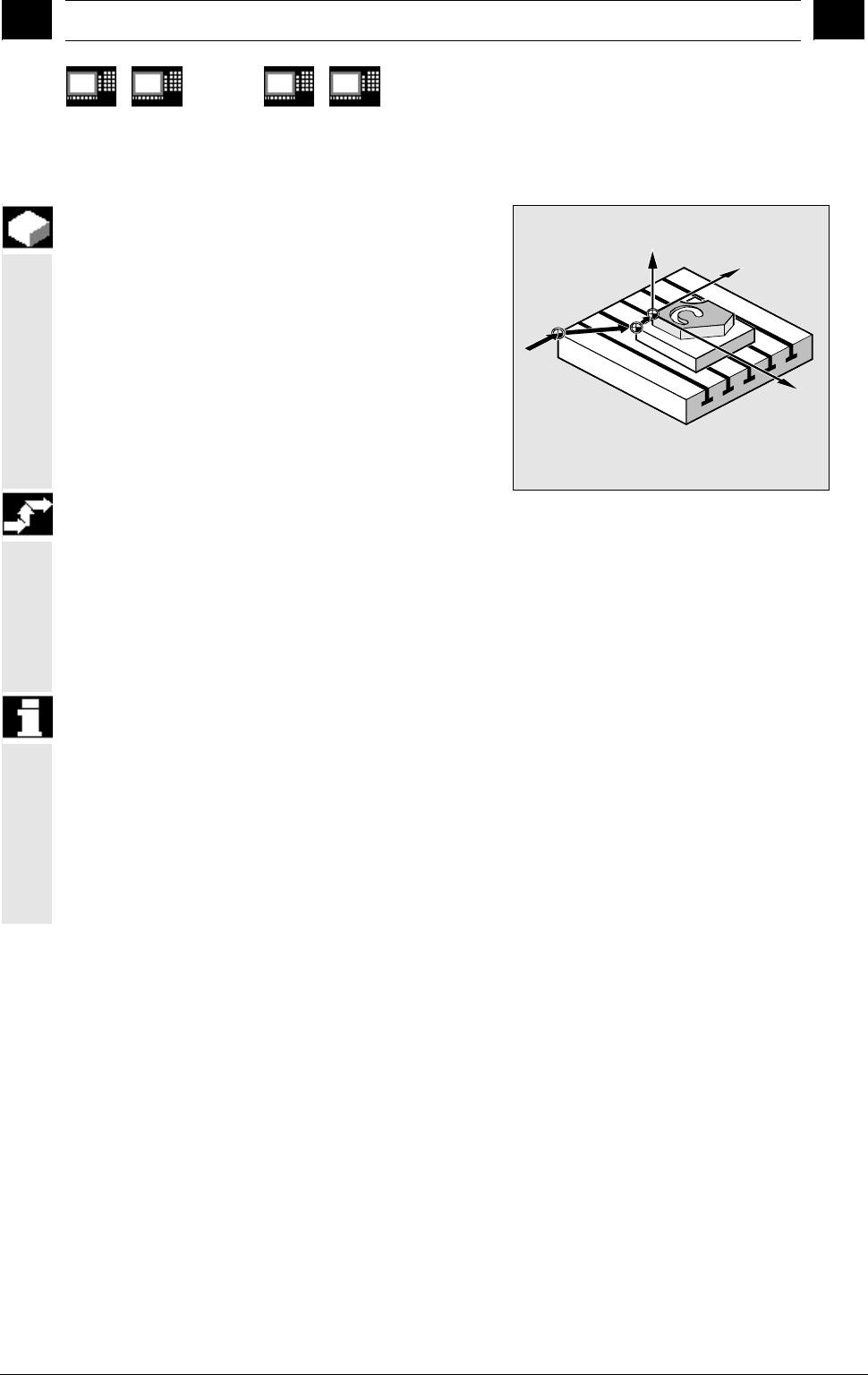
Цепочки фреймов подходят, к примеру, для
описания нескольких деталей, расположенных на
одной палетте, и которые должны
обрабатываться в одном технологическом
процессе.
Выполнение
Фреймы связываются друг с другом в
запрограммированной последовательности,
компоненты фрейма (смещения, повороты и т.п.)
последовательно исполняются.
G54
Z
X
Y
Для описание задач палетт компоненты фрейма
могут содержать, к примеру, только
определенные отдельные величины, через
соединение которых создаются различные
нулевые точки детали.
Обратить внимание на то, что фреймы должны
быть соединены друг с другом связывающим
оператором «двоеточие» :.
6
09.01 Фреймы
6
840D
NCU 571
840D
NCU 572
NCU 573
810D
840Di
ООО Siemens 2001 Все права защищены.
SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01 6-213
Определение новых фреймов
Программирование
DEF FRAME PALETTE 1
PALETTE1=CTRANS(…):CROT(…)…
Функция
Наряду с уже описанными заранее
определенными, настраиваемыми фреймами
существует возможность создавать новые
фреймы.
Здесь речь идет о переменной типа FRAME,
которая определяется присвоением любого
имени.
Выполнение
С помощью функций CTRANS, CROT, CSCALE и
CMIRROR фреймам в NC-программе можно
присваивать значения.
Более подробная информация на предыдущих
страницах.
Определение поворотов фрейма
Функция
Определение специфических пользовательских ориентаций
в пространстве осуществляется через повороты фрейма:
• ROT: одиночные повороты для всех геометрических
осей
• ROTS, AROTS, CROTS: поворот через указание
пространственного угла (максимум 2); см. описание в
/FB1/ K2: Системы координат.
• TOFRAME: поворот через фрейм "TOFRAME“, Z-ось
которого показывает в направлении инструмента.
• TOROT: поворот через фрейм "TOROT", который
переписывает только сегмент поворота уже
запрограммированных фреймов.
6
Фреймы 09.01
6
840D
NCU 571
840D
NCU 572
NCU 573
810D
840Di
ООО Siemens 2001 Все права защищены.
6-214 SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01
6.3 Грубое и точное смещение
Функция
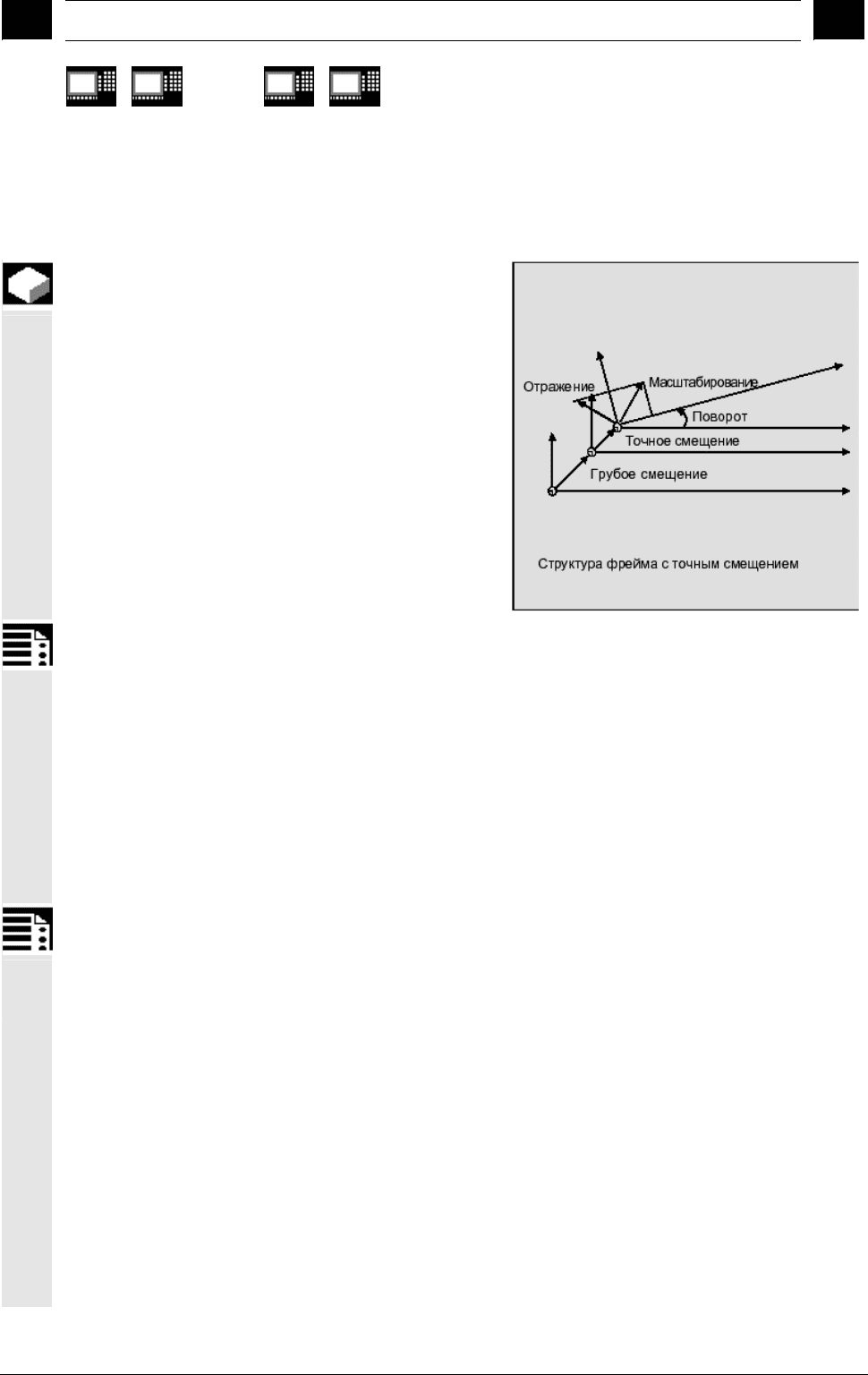
Точное смещение
С помощью команды CFINE(X, ..,Y, ...)
можно запрограммировать точное смещение
базового фрейма и всех настраиваемых
фреймов.
Грубое смещение
С помощью CTRANS(...) определяется грубое
смещение.
Грубое и точное смещение суммируются в общее
смещение.
Программирование
$P_UBFR=CTRANS(x, 10) : CFINE(x, 0.1) : CROT(x, 45) ;связь смещения,
точного смещения и поворота
$P_UIFR[1]=CFINE(x, 0.5, y, 1.0, z, 0.1) ;весь фрейм переписывается с
помощью CFINE вкл. грубое
смещение
Доступ к отдельным компонентам точного
смещения осуществляется через указание
компонентов FI.
Программирование
DEF REAL FINEX ;определение переменной FINEX
FINEX=$P_UIFR[$P_UIFRNUM, x, FI] ;считывание точного смещения через
переменную FINEX
FINEX=$P_UIFR[3, X, FI] ;
считывание точного смещения X-оси в третьем фрейме через
переменную FINEX
Точное смещение может быть осуществлено,
только если машинные данные MD18600:
MM_FRAME_FINE_TRANS=1.
Измененное через управление точное смещение
становится активным только после активизации
соответствующего фрейма, т.е активизация
осуществляется через G500, G54...G599.
Активизированное точное смещение остается
активным, пока активен фрейм.
6
09.01 Фреймы
6
840D
NCU 571
840D
NCU 572
NCU 573
810D
840Di
ООО Siemens 2001 Все права защищены.
SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01 6-215
Программируемый фрейм не имеет доли точного
смещения. Если программируемому фрейму
присваивается фрейм с точным смещением, то
его общее смещение образуется из суммы
грубого и точного смещения. При чтении
программируемого фрейма точное смещение
всегда равно нулю.
Изготовитель станка
От ПО 5
С помощью машинных данных MD18600
MM_FRAME_FINE_TRANS могут быть
осуществлены следующие варианты
проектирования точного смещения:
0: Точное смещение не может быть задано или
запрограммировано. G58 и G59 невозможны.
1: Точное смещение для настраиваемых
фреймов, базовых фреймов, программируемых
фреймов, G58 и G59 могут быть заданы или
запрограммированы.
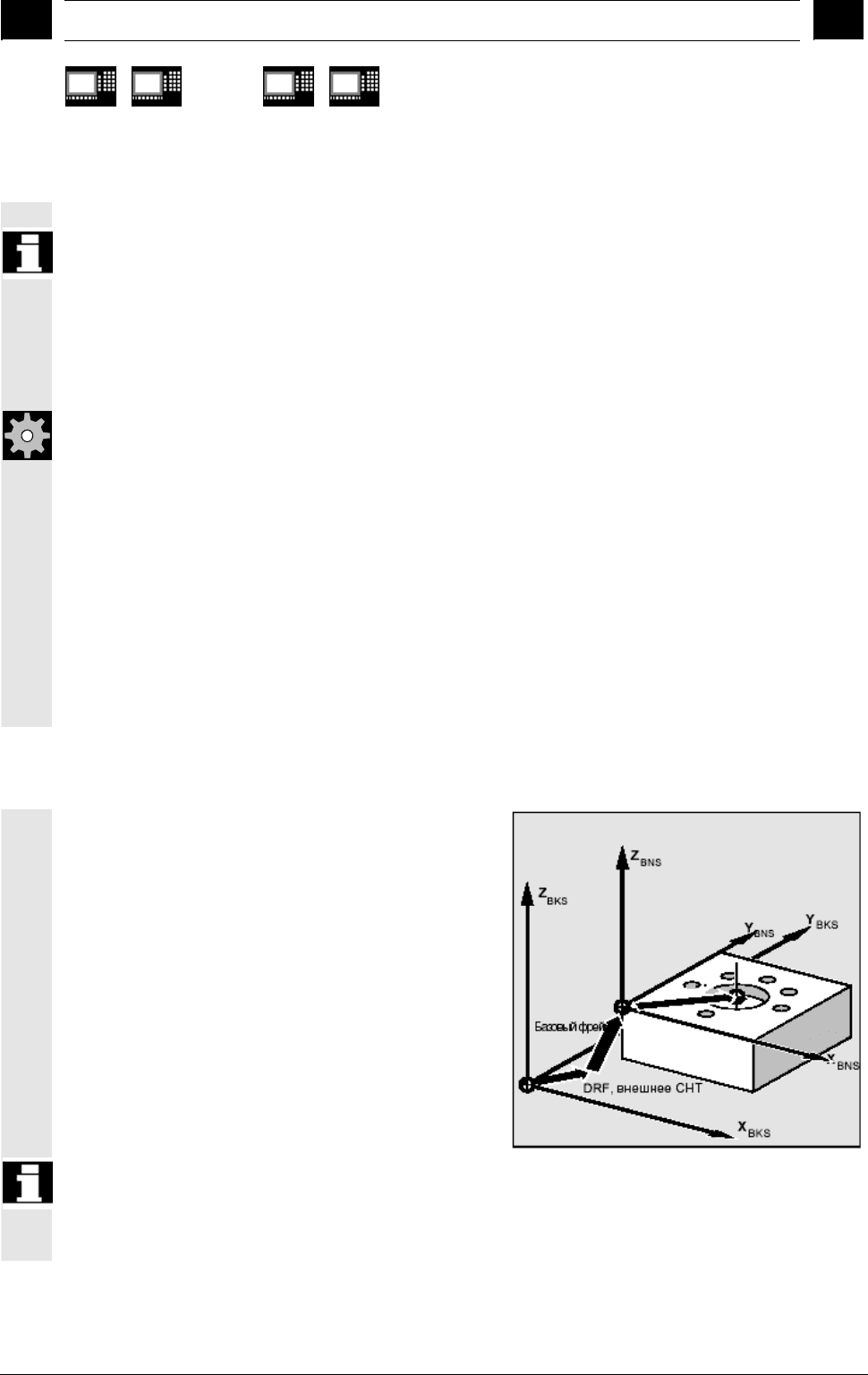
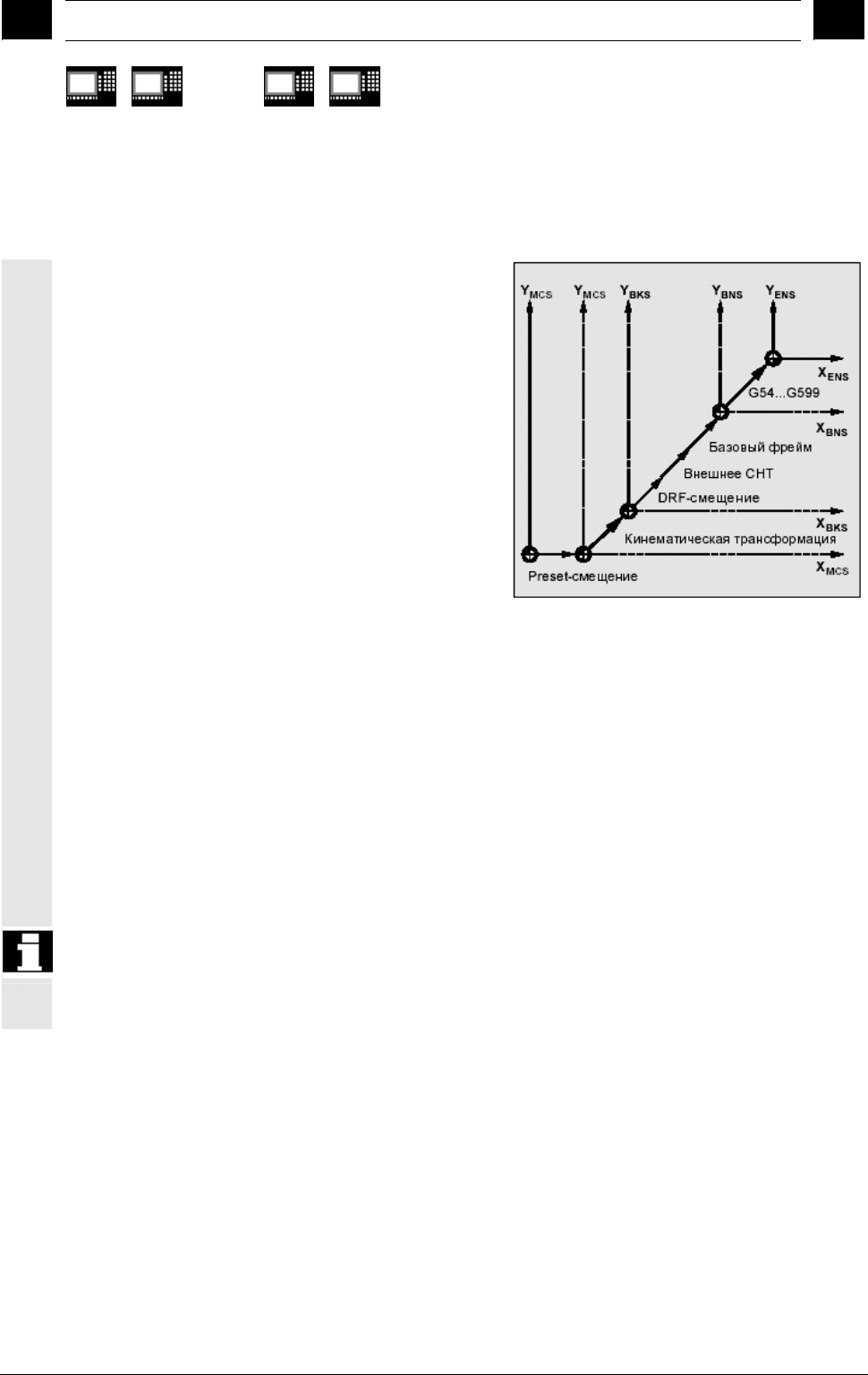
6.4 DRF-смещение
Смещение с помощью маховика, DRF
В дополнение ко всем рассмотренным в этой
главе смещениям смещения нулевой точки могут
устанавливаться с помощью маховика (DRF-
смещения).
DRF-смещение действует в базовой
кинематической системе. Связи см. рисунок.
Более подробную информацию см. руководство
по эксплуатации.
Стирание DRF-смещения, DRFOF
С помощью DRFOF стирается смещение с
помощью маховика для всех подчиненных каналу
осей. DRFOF находится в своем NC-кадре.
6
Фреймы 09.01
6
840D
NCU 571
840D
NCU 572
NCU 573
810D
840Di
ООО Siemens 2001 Все права защищены.
6-216 SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01
6.5 Внешнее смещение нулевой точки
Внешнее смещение нулевой точки
Благодаря этому имеется дополнительная
возможность смещения нулевой точки между
базовой кинематической системой и системой
координат детали.
Для внешнего смещения нулевой точки могут
быть запрограммированы только линейные
смещения.
Программирование значений смещения,
$AA_ETRANS
Программирование осуществляется через
загрузку специфических осевых системных
переменных.
Присвоение значения смещения
$AA_ETRANS[Achse]=R
I
R
I
это R-переменная типа REAL, которая
получает новое значение.
Внешнее смещение, как правило, указывается не
в программе обработки деталей, а
устанавливается PLC.
Записанная в программе обработки деталей
величина становится активной лишь после
установления на VDI-интерфейсе (NCU-PLC-
интерфейс) соответствующего сигнала.
6
09.01 Фреймы
6
840D
NCU 571
840D
NCU 572
NCU 573
810D
840Di
ООО Siemens 2001 Все права защищены.
SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01 6-217
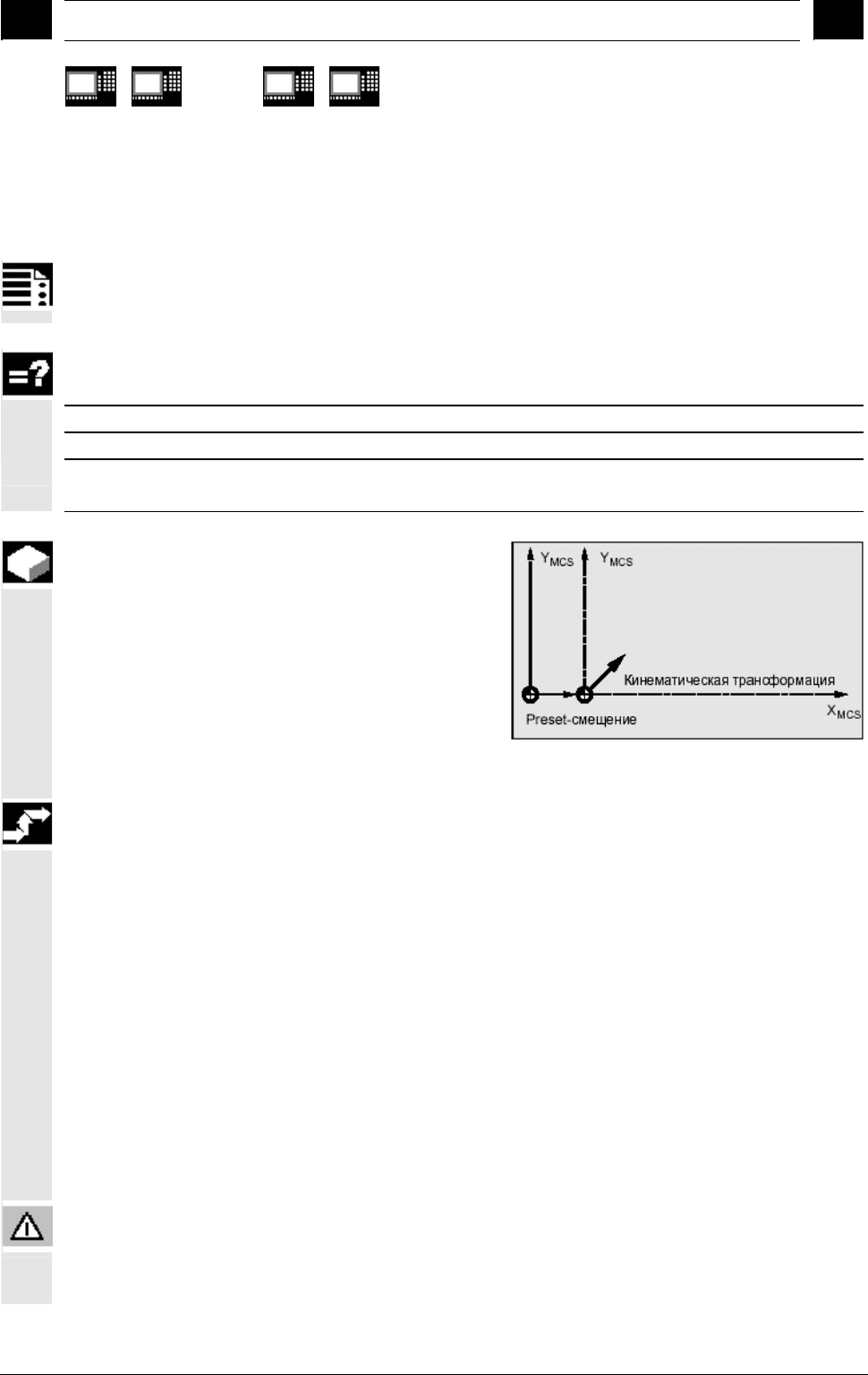
6.6 Программирование Preset-смещения, PRESETON
Программирование
PRESETON(ACHSE,WERT,…)
Объяснение команд
PRESETON
установка фактической величины
Achse
указание оси станка
Wert
новая фактическая величина, которая должна действовать для
указанной оси
Функция
В особых случаях требуется присвоение одной
или нескольким осям в актуальной позиции (при
остановке) новой, запрограммированной
фактической величины.
Выполнение
Присвоение фактических величин
осуществляется в системе координат станка –
величины относятся к осям станка.
Пример:
N10 G0 A760
N20 PRESETON(A1,60)
Ось A движется к позиции 760. Ось станка A1
получает в позиции 760 новую фактическую
величину 60.
С этого момента позиционирование
осуществляется в новой системе фактических
величин.
С помощью функции PRESETON референтная точка становится недействительной.
Поэтому данная функция должна использоваться только для осей без обязательной
референтной точки. Для восстановления первичной системы необходимо с помощью
G74 переместиться к референтным точкам – см. главу 3.1.
6
Фреймы 09.01
6
840D
NCU 571
840D
NCU 572
NCU 573
810D
840Di
ООО Siemens 2001 Все права защищены.
6-218 SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01
6.7 Деактивизация фреймов
Объяснение команд
DRFOF
Выключение (стирание) смещений с помощью маховика (DRF)
G53
Покадровое выключение программируемых и всех настраиваемых
фреймов
G153
Покадровое выключение программируемых, базовых и всех
настраиваемых фреймов
SUPA
Покадровое выключение программируемых, базовых, всех
настраиваемых фреймов и смещений с помощью маховика (DRF)
Прочие указания
Программируемые фреймы стираются
присвоением «нулевого фрейма» (без указания
оси) программируемому фрейму.
Пример:
$P_PFRAME=TRANS( )
$P_PFRAME=ROT( )
$P_PFRAME=SCALE( )
$P_PFRAME=MIRROR( )
6
09.01 Фреймы
6
840D
NCU 571
840D
NCU 572
NCU 573
810D
840Di
ООО Siemens 2001 Все права защищены.
SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01 6-219
6.8 Вычисление фрейма из трех точек измерения в пространстве, MEAFRAME
MEAFRAME это расширение языка 840D для
поддержки циклов измерения.
Эта функций имеется от ПО 4.3
Функций
Если деталь позиционируется для обработки, то ее
позиция и смещена, и повернута относительно
декартовой системы координат станка
относительно ее идеальной позиции.
Для точной обработки или измерения необходима
либо дорогостоящая физическая юстировка, либо
изменение движений в программе обработки
деталей.
Посредством зондирования трех точек в
пространстве может быть определен фрейм,
идеальные позиции которого известны.
Зондирование осуществляется с помощью
контактного или оптического сенсора, который
касается специальных, точно зафиксированных на
несущей плите отверстий или измерительных
шариков.
Функция MEAFRAME вычисляет фрейм из трех
идеальных и соответствующих измеренных точек.
Чтобы измеренные координаты могли быть
подчинены идеальным координатам с
комбинированным вращением/трансляцией,
образуемый точками измерения треугольник
должен быть конгруэнтен идеальному треугольнику.
Это осуществляется алгоритмом компенсации,
который минимизирует сумму квадратов
отклонений, которые преобразуют измеренный в
идеальный треугольник.
Эффективное необходимое искажение точек
измерения может служить индикатором качества
измерения и выдается как дополнительная
переменная MEAFRAME.
6
Фреймы 09.01
6
840D
NCU 571
840D
NCU 572
NCU 573
810D
840Di
ООО Siemens 2001 Все права защищены.
6-220 SINUMERIK 840D/840Di/810D Руководство по программированию. Расширенное программирование (PGA) - Выпуск 09.01
Программирование
MEAFRAME(IDEAL_POINT,MEAS_POINT,FIT_QUALITY)
Объяснение команд
MEAFRAME
Вычисление фрейма из трех точек измерения в пространстве
IDEAL_POINT
2-х размерное Real-поле, включающее три координаты идеальных
точек
MEAS_POINT
2-х размерное Real-поле, включающее три координаты измеренных
точек
FIT_QUALITY
Real-переменная, с помощью которой возвращается следующая
информация:
-1: Идеальные точки лежат практически на одной прямой: Фрейм
не может быть вычислен. Возвращаемая фрейм-переменная
содержит нейтральный фрейм.
-2: Точки измерения точки лежат практически на одной прямой:
Фрейм не может быть вычислен. Возвращаемая фрейм-
переменная содержит нейтральный фрейм.
-4: Вычисление матрицы вращения не удается по другим
причинам
положительная величина:
Сумма искажений (расстояния между точками), необходимая
для преобразования измеренного треугольника в
конгруэнтный идеальному треугольник.
Пример использования
; Программа обработки детали 1
;
DEF FRAME CORR_FRAME
;
; установка точек измерения
DEF REAL IDEAL_POINT[3,3] = SET(10.0,0.0,0.0, 0.0,10.0,0.0, 0.0,0.0,10.0)
DEF REAL MEAS_POINT[3,3] = SET(10.1,0.2,-0.2, -0.2,10.2,0.1, -0.2,0.2, 9.8); для теста
DEF REAL FIT_QUALITY = 0
;
DEF REAL ROT_FRAME_LIMIT = 5; разрешает поворот позиции детали макс. на 5
o
DEF REAL FIT_QUALITY_LIMIT = 3; разрешает макс. 3 mm смещения между идеальным ;
и измеренным треугольником
DEF REAL SHOW_MCS_POS1[3]
DEF REAL SHOW_MCS_POS2[3]
DEF REAL SHOW_MCS_POS3[3]
; =======================================================