Розенберг В.Я. Введение в теорию точности измерительных систем
Подождите немного. Документ загружается.

р*
"31
-л
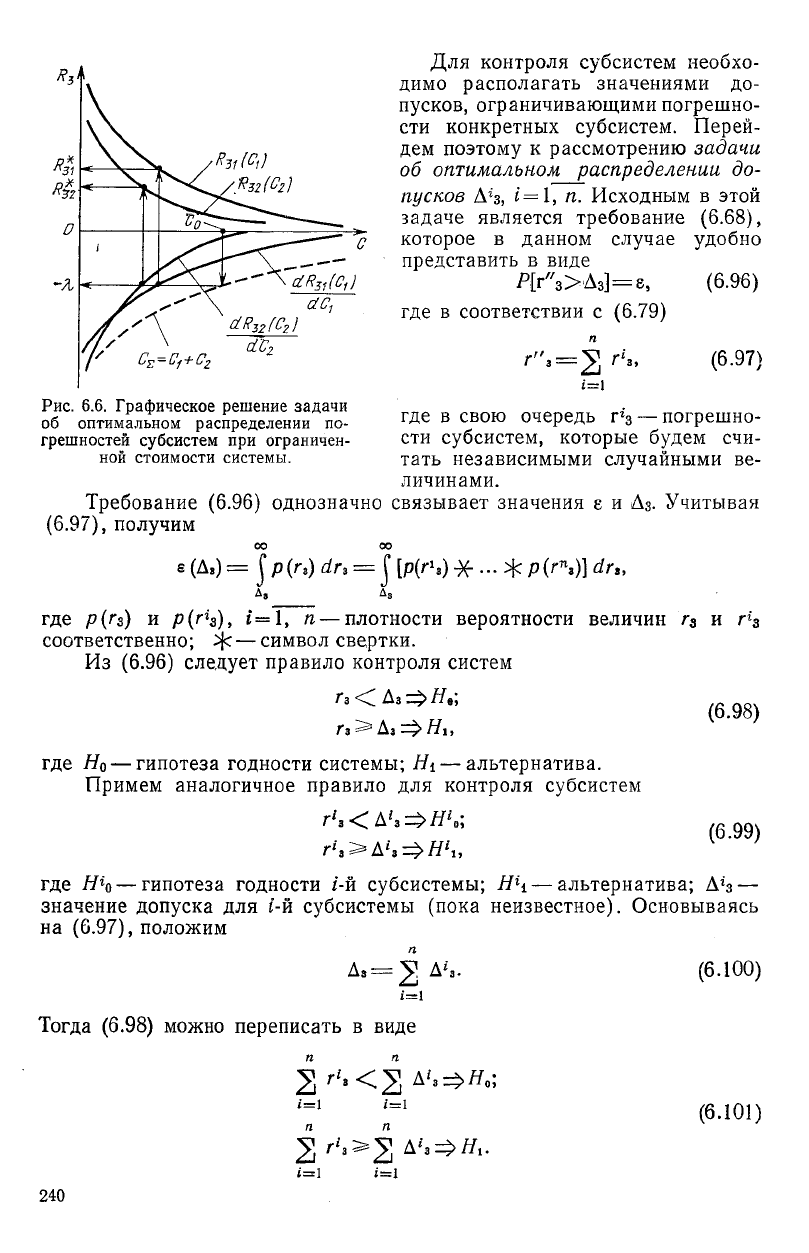
Для контроля субсистем необхо-
димо располагать значениями до-
пусков, ограничивающими погрешно-
сти конкретных субсистем. Перей-
дем поэтому к рассмотрению задачи
об оптимальном распределении до-
пусков Д»з, г=1, п. Исходным в этой
задаче является требование (6.68),
которое в данном случае удобно
представить в виде
Р[г
,/
з>Дз]=е, (6.96)
где в соответствии с (6.79)
г", = 2 г<з, (6.97)
1 = 1
Рис. 6.6. Графическое решение задачи
об оптимальном распределении по-
грешностей субсистем при ограничен-
ной стоимости системы.
где в свою очередь г
г
3
— погрешно-
сти субсистем, которые будем счи-
тать независимыми случайными ве-
личинами.
Требование (6.96) однозначно связывает значения е и Дз. Учитывая
(6.97), получим
ОО 00
6 (Д,) = |
Р (Гз)
Ли = | [Р(ГЧ) *
. • •
* р (г"з)] йгг,
где р(гз) и р(г*з), 1=1, п — плотности вероятности величин г
3
и г
3
соответственно; % — символ свертки.
Из (6.96) следует правило контроля систем
(6.98)
(6.99)
Гз
< Дз Я
в
;
Гз^Дз :фЯ„
где Н
0
— гипотеза годности системы; Н\ — альтернатива.
Примем аналогичное правило для контроля субсистем
г'з<Д'з=>#
г
„;
г'.^А'.^Я
1
,,
где
Н*о
— гипотеза годности /-й субсистемы; — альтернатива; Д*з—
значение допуска для г'-й субсистемы (пока неизвестное). Основываясь
на (6.97), положим
п
д
3
= 2 А
1
*. (6.100)
1 = 1
Тогда (6.98) можно переписать в виде
2 г'. <2 А'з=фЯ
0
;
1 = 1 1 = 1
2 г»,
1 = 1 1 = 1
(6.101)
240.
рМ)*
Зафиксируем некоторые значения Д'з (1=1, п). Из (6.101) следует
V* е {О} г
1
з
< Д', => Я,. (6.102а)
Обратное утверждение
31'еОТл}: (6.1026)
вообще говоря, неверно, поскольку превышение допуска погрешностью
одной субсистемы может быть случайно скомпенсировано уменьшенны-
ми значениями погрешностей осталь-
ных субсистем.
Отметим, что по этой причине чис-
ло субсистем, входящих в системы, за-
бракованных по правилу (6.98), будет
меньше, чем количество субсистем, за-
бракованных по правилу (6.99).
Таким образом, значения Д
г
'
3
не
определяются однозначно приведен-
ными выше соотношениями. Необхо-
димо дополнительное условие, позво-
ляющее выбрать Д'з единственным и
в каком-то смысле оптимальным обра-
зом. В качестве такого условия при-
мем требование, состоящее в том, что-
бы общая стоимость забракованных по
правилу (6.99) субсистем была мини-
мальной.
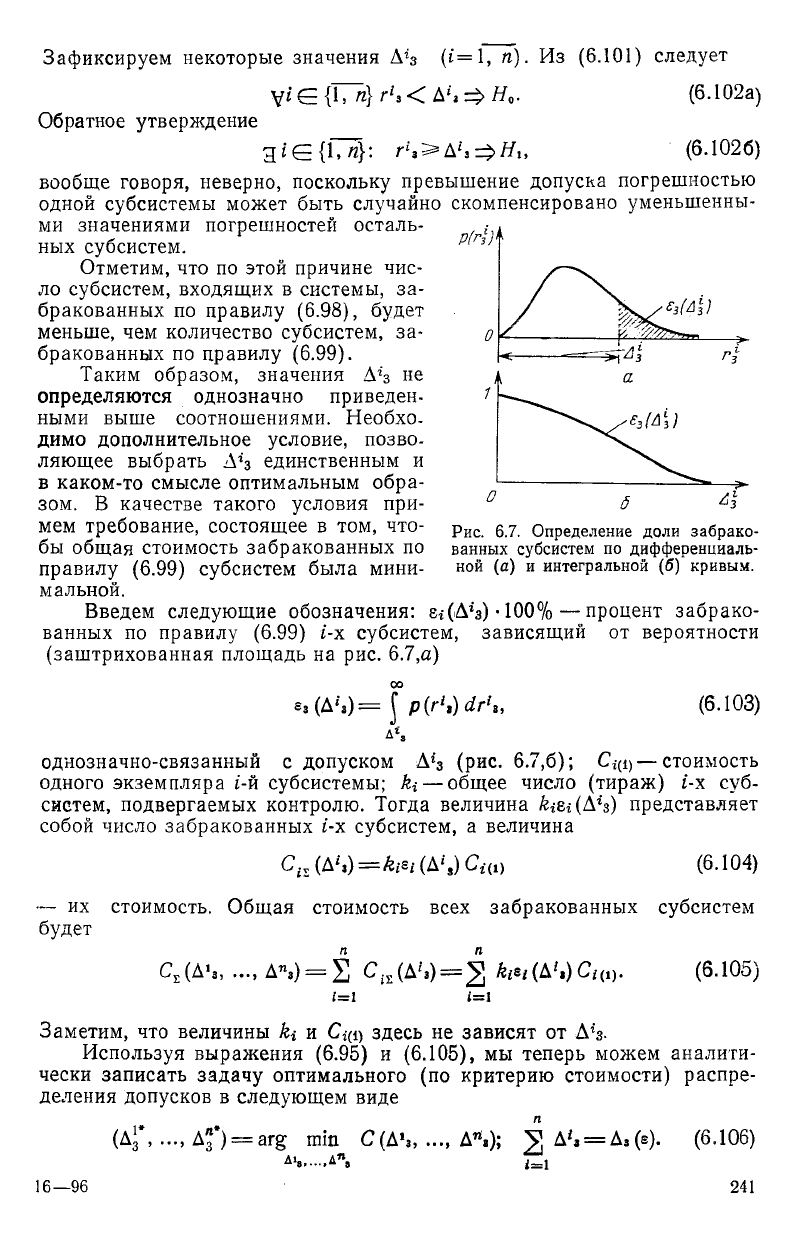
Введем следующие обозначения: ег(Д*з)
-
Ю0%—процент забрако-
ванных по правилу (6.99) 1-х субсистем, зависящий от вероятности
(заштрихованная площадь на рис. 6.7,а)
Рис. 6.7. Определение доли забрако-
ванных субсистем по дифференциаль-
ной (а) и интегральной (б) кривым.
8,(Д',)= { р{г
1
г)йг'
а
(6.103)
однозначно-связанный с допуском Д*з (рис. 6.7,6); Сцц— стоимость
одного экземпляра 1-й субсистемы; кг— общее число (тираж) 1-х суб-
систем, подвергаемых контролю. Тогда величина кгег(Д*з) представляет
собой число забракованных 1-х субсистем, а величина
С
к
(Д',) = А
/
8,(Д'
1
)С«
1
, (6.104)
— их стоимость. Общая стоимость всех забракованных субсистем
будет
С,(Д>
3
, = Е С„(Д',) = 2 *|«/(Д',)С
/(
„. (6.105)
1 = 1 1=1
Заметим, что величины кг и Сщ) здесь не зависят от Д*з-
Используя выражения (6.95) и (6.105), мы теперь можем аналити-
чески записать задачу оптимального (по критерию стоимости) распре-
деления допусков в следующем виде
:
аг% шш С (Д'з,
4'» А»,
1=1
:Д,(«). (6.106)
16—96 241
(6.108)
Решение этой задачи формально ничем не отличается от решения
.задачи (6.91) и совместно с (6.105) имеет вид
1цС
Н1)
с1е1{А
1
3
)1с1А
1
3
= —Х]
г
=17л. (6.107)
4. Определение ограничений. Если на всю систему заданы некото-
рые ограничения вида <рг(Л
р
)<Г/, /=1, 8 (см. (6.68)), то определение
ограничений вида
<р
г
(А
р
)<, // = 1,6/ (6.69) на ее субсистемы пред-
ставляет собой задачу распределения ресурсов, решаемую методом
динамического программирования [131 ... 134].
Представляет также интерес другая задача, возникающая при про-
изводстве субсистем универсального применения, когда эти субсистемы
.желательно оптимизировать по собственным характеристикам, независи-
мо от таких факторов, как входной процесс и структура всей системы,
а эти последние факторы учесть в качестве ограничений. При этом же-
лательно найти оценку вида
п
4 = 1
тде щ — функционалы, играющие роль ограничений, налагаемых на
.входной процесс и характеристики других субсистем и, таким образом,
учитывающие положение 1-й субси-
стемы в системе; — погрешность
1-й субсистемы, не зависящая от ее
положения и выражаемая через ее
собственную характеристику, точнее,
через уклонение реальной характе-
ристики от номинальной. Решение
этой задачи связано с применением
различных неравенств, дающих оцен-
ку сверху погрешностей субсистем,
в результате чего точность систем,
оптимизируемых указанным спосо-
бом, оказывается ниже, чем точность систем, оптимизируемых «прямым
методом» (методом динамического программирования) или методами,
•основанными на определении погрешностей субсистем выражениями
(6.73) или (6.78). Этот вопрос целесообразно рассмотреть на конкрет-
ных примерах, поскольку общие рекомендации дать затруднительно.
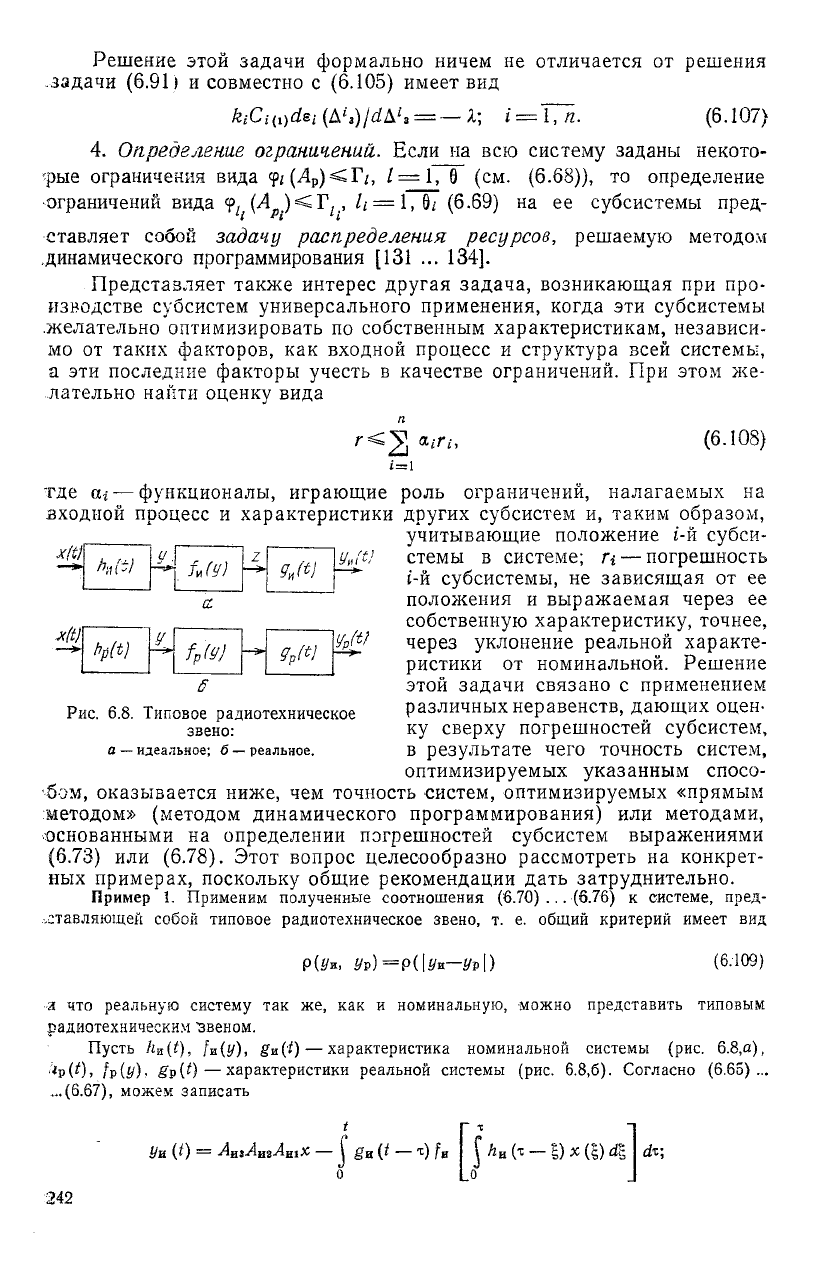
Пример 1. Применим полученные соотношения (6.70) ... (6.76) к системе, пред-
ставляющей собой типовое радиотехническое звено, т. е. общий критерий имеет вид
хШ
хШ
ш
у
уШ
г
а.
ЬрМ
•У
</пМ
Рис. 6.8. Типовое радиотехническое
звено:
а — идеальное; б — реальное.
9(Уж, Ур)=9(\Уж—Ур\)
(6.109)
•а что реальную систему так же, как и номинальную, можно представить типовым
радиотехническим "звеном.
Пусть А
и
(0> /и(у), §и('0 — характеристика номинальной системы (рис. 6.8,а),
Ы0—характеристики реальной системы (рис. 6.8,6). Согласно (6.65)...
...(6.67), можем записать
УИ
(0 = АиАпАщгХ - |
8а
(I - т) ^ к, (х - I) X (|)
242.

1 1 V
Ур {() = А
РЗ
А
Р2
А
Р
1Х = | 8
Р
(( — х) /р | Л
р
(х — |) х (I) й| Йх.
о [о ^
Используя (6.108) и (6.71), получим
р = р{ _[л
и
(х-|)х(|)4 й--{^р(^-х)Г
р
Г|ар(х>
— | (г —
X)
/а
о
Йх
—
х)
/и
5 М-
йх -
Лр (*-6)*(6) «
Йх
— 6)*(Б)«
(
о Ь
- т "1 1
8в((-*)Гр ^ Л
р
(х — |) X (|) йх-5^
р
(^-х)/р
!
Л
Р -
т
Л [=Р П еш(*-*) Ь.
|й
И
(х-|)х(1) й%-
-Г
Р
5 АР(Х-6)Х(5) Й§||ЙХ
_[А р (Х-1)Х(6) Й||1ЙХ
т. е.
р| =
Р
[Ар (0. (Л (0)] =
р
-
|л
р
(х-|)х©й| 1йх ;
р« = р[Ы*Мр(0. {*(<)}] = р( \ и |А
Р
(Х-|)Х(Е)Й1
•/р
Р» =
Р
1ёр (0. ?р (У)' Ар (0. {X (*)}] =
Р
'
— 8и Гр
З'йр (*-Б)*Ш«*Е
йх
16*
243

Пусть, например, результат измерения — скалярная величина. Тогда согласно
(4.25),
р(|Л
р
*—А
я
х\) = |Л
р
х—А
я
х\. (6.110)
Оценим р1, р
2
и р
3
. Оценка р1 (рис. 6.9) имеет вид
Ь =
I
I
X
5 Аи(*-Ъ)х(1 )й%
-/г
-Гн
5
Ар (-е
— Б) ж (Е) «
.0
т
| А
р
(-«-Е)х(Б)^
•
йг
йг.
хЩ
-
№
-
Ч у*;
/и (у) -
Р
Р,
Рис. 6.9. Схема определения погреш-
ности первой субсистемы.
Используя неравенство
I и [У (0] -
Г» [Уо
(011 <
1
У(()~Уо (01 шах Го (У),
{«}
справедливое для монотонно неубывающих функций, получим
I х
р1
< тах Гв (У) [
I
8* ((- О Г [Ар (?) -
А>
(|)] * (х -1)
]
йг <
о о
00 оо
< шахГи [у) тах х ({) Г [ (() I йхГ | к
р
{1) — к
я
({) | И.
(П {*} $ о
Предполагая оценку несмещенной, на основании (3.84) можем записать
Тогда
о
00
р! < тах /'
и
(у) тах х {() 1
|
к
р
(() — к
а
(()
|
сИ.
(П } г.
(6.111)
Для стационарного случайного процесса *(0> применяя к обеим частям неравен-
ства операцию усреднения по множеству {«(/)}, получим
00 со
К<та*Г*(У)М{х({)} (01 Л- Г|М0-М01^
{"} о о
или, для несмещенной оценки,
т
1
< М {х (0}тах /'
и
(у) (' | Н
р
(0 - А
и
(0 | Л,
(П г
(6.112)
где функционал 11 к
р
(I) — к
я
(() | й( определяет уклонение реальной импульсной реакции
о
линейной субсистемы от идеальной, а остальные сомножители характеризуют положе-
ние этой субсистемы в системе.
244.
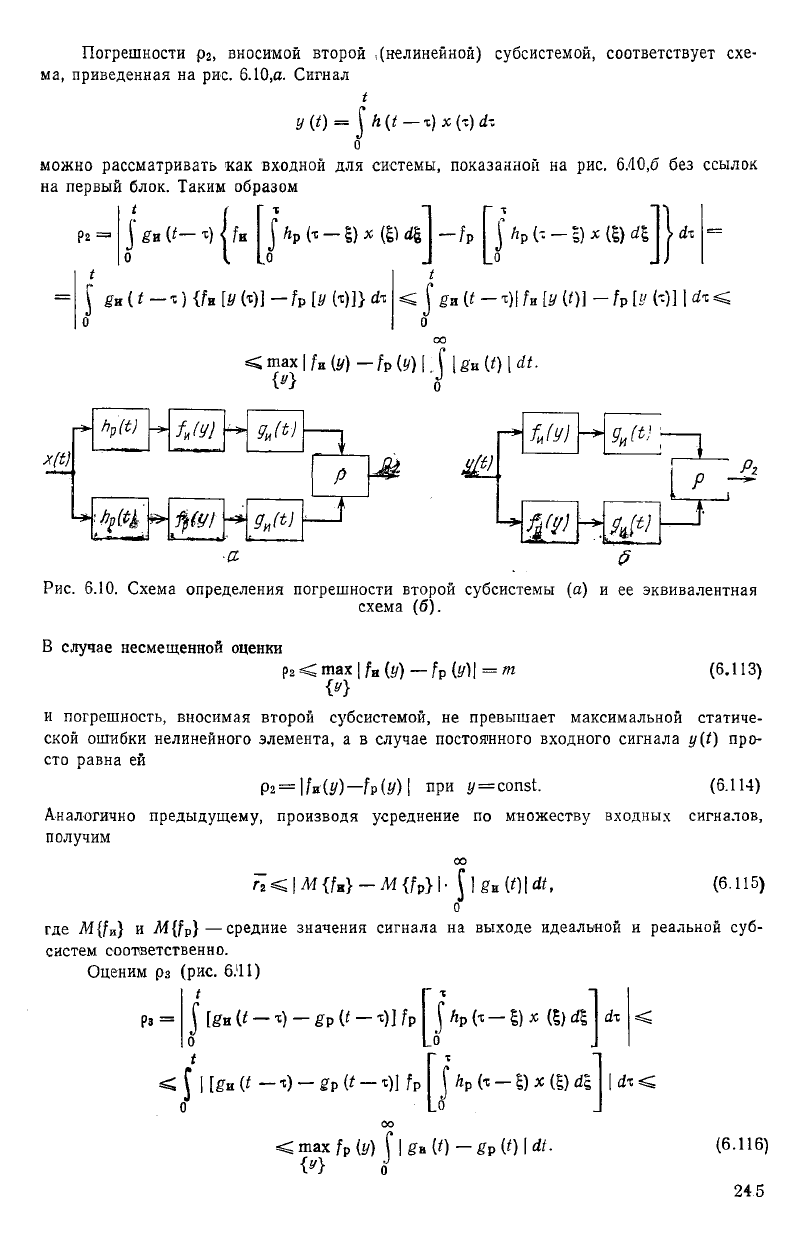
Погрешности рг, вносимой второй .(нелинейной) субсистемой, соответствует схе-
ма, приведенная на рис. 6.10,а. Сигнал
{
у{1) = |й(<-т)х(т) й-.
о
можно рассматривать как входной для системы, показанной на рис. 6Л0,б без ссылок
на первый блок. Таким образом
* ( Г
т
1
р
2
= -и ] Лр(- — 1)х (|)
Йх
о I 10
5 ЦЯ ( I -
X
) Ни [У (х)] -
[р
[У (X)]} йх < |
ёя
(* -
х)|
(01 - Ь \У
I
^
[) О
с»
\{*{у)-{р (?/) |, 11 ёи (01^-
,тах |
х[Ъ)
ЫО
Ш
и
щ *
9
И
Ш
А
- ....
Ж Ш.
т
р -
1
№
и $
РИС. 6.10. Схема определения погрешности второй субсистемы (а) и ее эквивалентная
схема (б).
В случае несмещенной оценки
р
2
< тах | /=
и
{у) — (4г)| = т
(6.113)
и погрешность, вносимая второй субсистемой, не превышает максимальной статиче-
ской ошибки нелинейного элемента, а в случае постоянного входного сигнала у({) про-
сто равна ей
Р2=\[я{у)— Ы</)| при У = СОП31. (6.114)
Аналогично предыдущему, производя усреднение по множеству входных сигналов,
получим
(6.115)
где М{{и} и МУ,}—средние значения сигнала на выходе идеальной и реальной суб-
систем соответственно.
Оценим рз (рис. 6.11)
I [I
| [?. а - х) - Вр (< - х)] !р С Ар (Х- |) х (|)
Рз =
ЙХ
<
5 О-Ы'-•«)]&> |а
р
(х-9Х(|)Й5
о Ь
00
< тах
Гр
(у)
Г I
(о - ^Р
(О I
(И-
{'} о
йх
-
(6.116)
245.

Усредня , имеем
оо
7
г
< М {2} | |
ёи
(1) - ^р (0| Л. (6.117)
о
Итак, при использовании общего критерия вида (6Л'10) требования к характери-
стикам линейных субсистем ограничивают уклонения в среднем импульсных реакций
соответствующих идеальных и реальных субсистем |(см. (6.Ы1) и (6.112)), а требова-
ние к нелинейной системе ограничивает допустимое уклонение соответствующих ста-
тических характеристик. При этом каждое из слагае-
мых общей погрешности, как это и предусматрива-
лось в самом начале (6.108), состоит из сомножите-
лей, один из которых характеризует «собственную»
погрешность субсистемы, а другие — ее положение
в системе. Последние представляют собой условия
устойчивости линейной системы, ограниченности ха-
рактеристики нелинейного звена в диапазоне мгно-
венных значений входного сигнала и ограниченности
самого входного сигнала системы.
Отдельные субсистемы типового радиотехниче-
ского звена в первом приближении мы представили
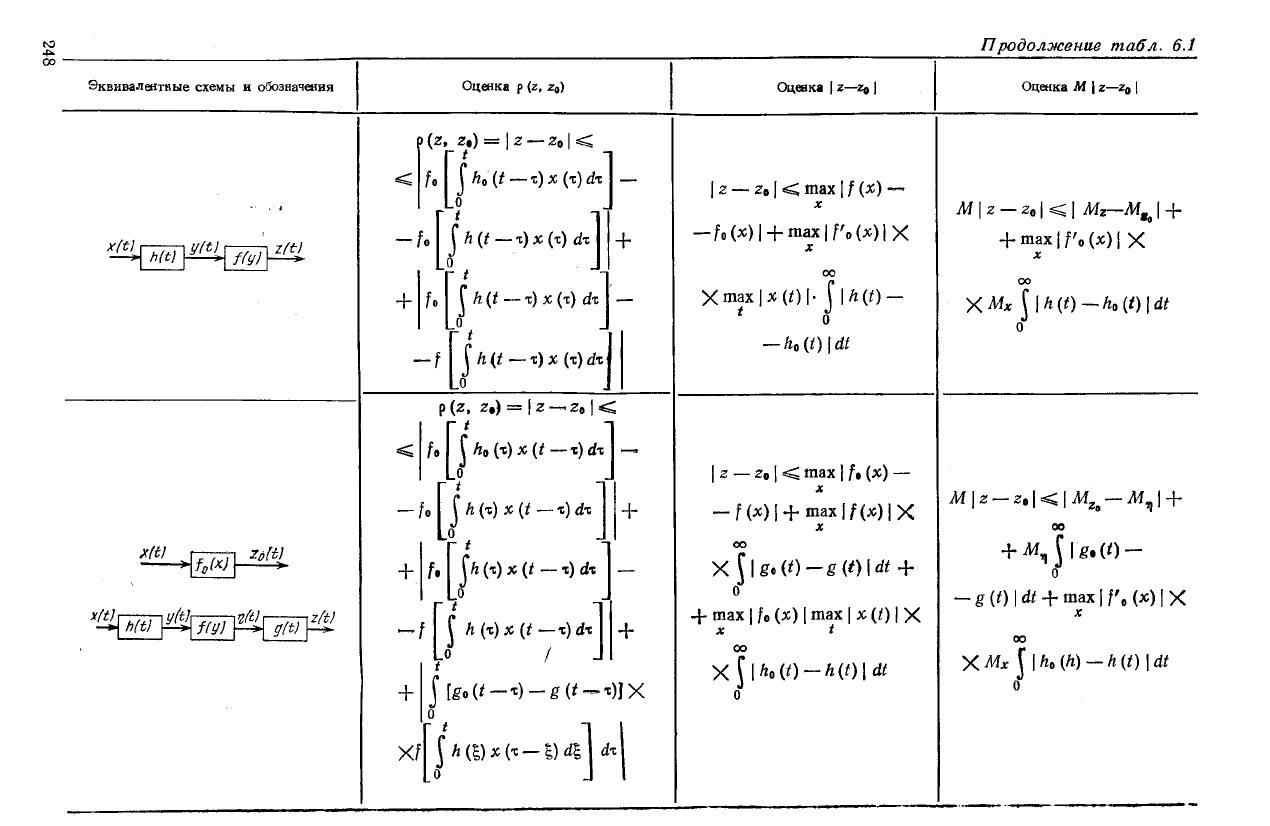
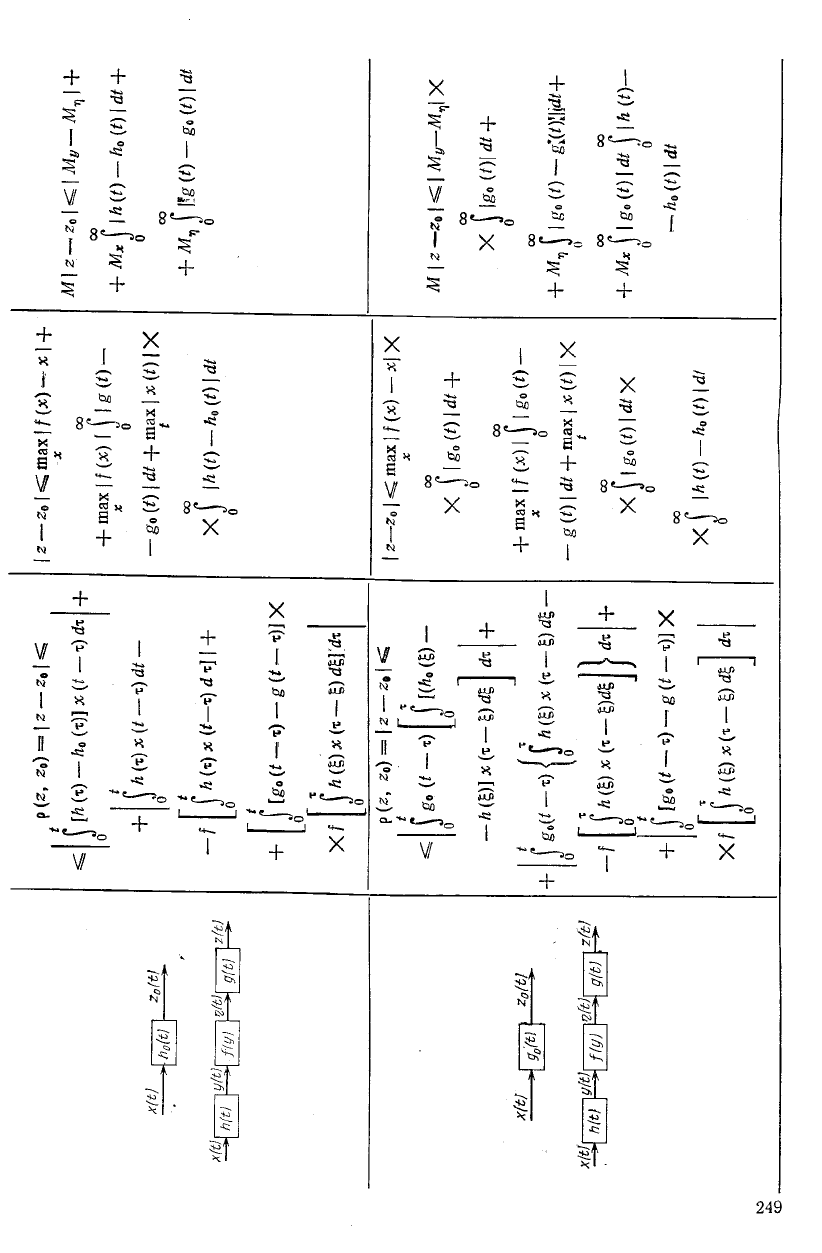
в виде схемы, показанной на рис 6.9. Далее оператор каждой субсистемы в свою оче-
редь можно аппроксимировать оператором типового радиотехнического звена (резуль-
таты расчетов представлены в табл. 6.1) или функциональным рядом Винера-Вольтер-
ра [141].
Таким образом, функционалы, оценивающие допустимую степень уклонения тех!
или иных характеристик реальной системы от номинальной, наряду с условиями физи-
ческой реализуемости системы и конечности объема наблюдений, играют роль ограни-
чений, вырабатываемых в процессе комплексирования системы. Аналогичным образом,,
требования ко всей системе (6.68) определяют на этапе решения задачи комплексирова-
ния суперсистемы.
Пример 2. Отказ от учета характеристик входного процесса приводит, как уже-
указывалось, к определенной потере информации о свойствах субсистемы. Проиллю-
стрируем это обстоятельство на примере оценки точности нелинейной безынерционной
системы. Обычно при анализе нелинейных безынерционных систем отклонение харак-
теристики (например, вольт-амперной) /р(х) реальной системы от желательной (или
идеальной) }я(х) оценивают по критерию равномерного приближения (максимального
уклонения характеристик) (6.113).
Такой способ, однако, не позволяет выявить связь величины т с погрешностью
системы, представляющей собой некоторое число (значение функционала), в определе-
нии которого учитывались бы вероятностные характеристики входного сигнала х(1)
(который предполагается стационарным случайным процессом), например, средний риск
Г= У?)р(Уи, ур)лу
а
йур, (6.Т18)
где I (•) — функция потерь.
Установим связь (6.113) и (6.118), используя предположение о монотонности
характеристик !
Р
(х) и М*) ['142].
Заметим первоначально, что для рассматриваемого класса систем, не обладаю-
щих памятью, р(уя, ур) И 1(у
и
, Ур) В (6.;1!1®) можно рассматривать не как функцио-
налы, а как обычные функции двух переменных. В результата континуальное инте-
грирование заменяется интегрированием на плоскости.
Учитывая, что
Р(Уш, УТ>)=Р(УК)Р(УР\УП)=Р(У*)6[УР—!р1~
1
я(у
я
)],
246.
Рис. 6.11. Схема определения
погрешности третьей субси-
стемы.
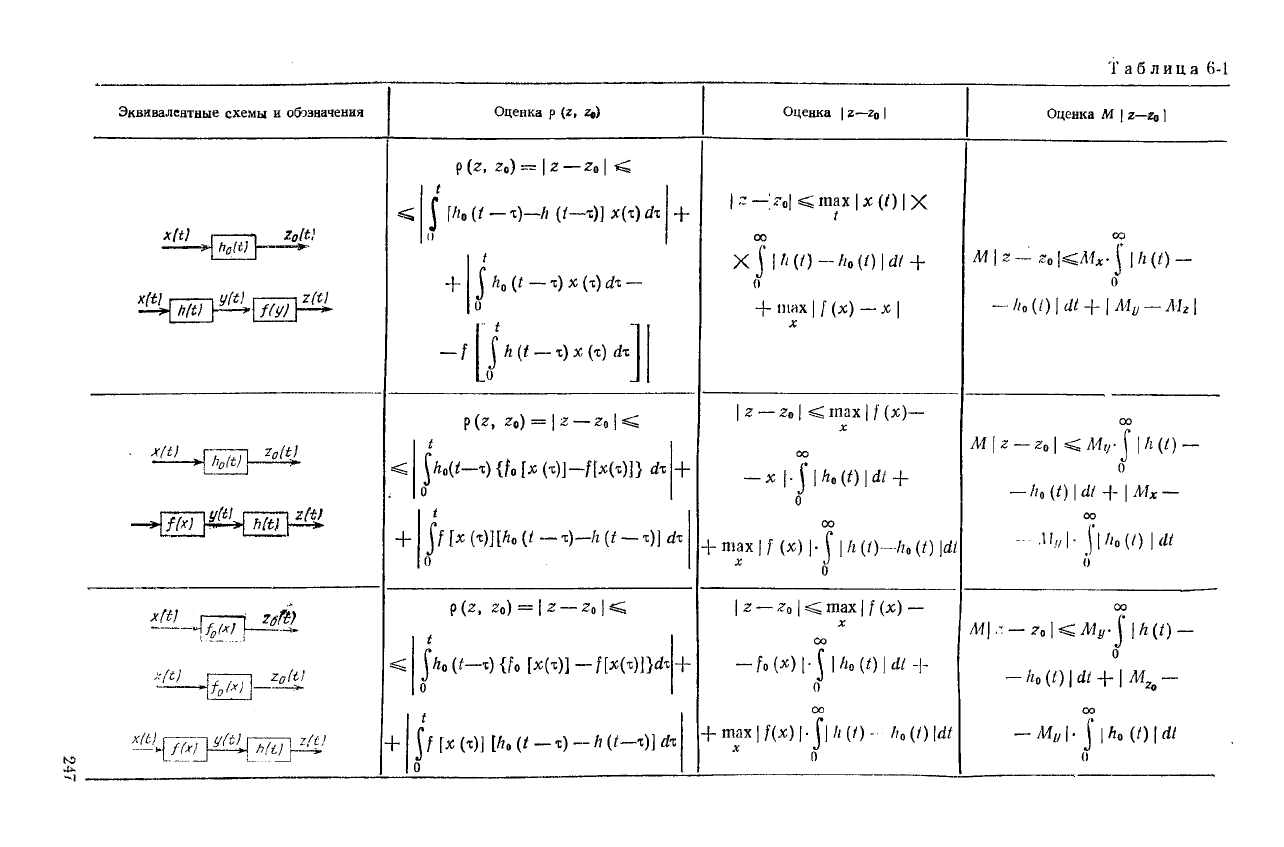
Таблица 6-1
Эквивалентные схемы и обозначения
Оценка р (г, г,)
Оценка | г—г
0
|
Оценка М | г—го ]
х(И
ь
0
и)
г
0
Ш
ф]
у/и Г——| г (а
ЩЩ^Ш
-47
хМ ГТТП
г
б№
—" г—
Р
(г, 2
0
) = | 2 — 2
0
| <
I
|
ГА.
(/ —-с)—Л (^-х)] х(х)йт
I
^ А
0
(I — х)
X
(г) йх —
—
/•
|
А (<
— г)
X
(х) йх
+
р(г, 2
0
) =
I
2 —2о
I
<
+
+
5м*-х) Л [X (х)]-Ял(х)]} ЙХ
О
I
[X (х)][А„ (< — х)—Л ({ — х)] ЙХ
р(2, 2
0
) = | 2 — 2
0
| <
+
(1-ъ){1о [Х(х)]-/[х(х)]}й'
о
{
\Х (х)1 [А„(/-х)-Л(^-х)]йх
+
:—>
0
|<шах|х(/)|Х
X ||й(/)-А.(0|Л +
+ тах | / (х) — х |
х
| г — г
0
| <тах| / (х)—
X
00
-х |.]'|А„(0|Л +
0
оо
+ тах | / (х)
| •
Г | Л (/)—Ло (() \й1
х л
| 2 — 2
0
1 < тах | [ (х) —
X
оо
М |г - г, ||А(0-
о
—
А„
(0 | М + | Му — Л1г
м |2-2
0
| |
I
/г (/) -
О
—
А
0
(0|й/ + |ЛГ* —
оо
- -Ч//1- ]'|М0 |<и
-/о (*)|-$1М0|л -I-
0
оо
+ тах|/(х)|- Г|Л(/)- А
0
(/)№
* У
0
00
]'|ЛО (01Л
м
оо •
Продолжение табл. 6.1
Эквивалентные схемы и обозначения
Оценка
р
(г, г
0
)
Оценка | г—г» | Оценка М | г—г„ |
-и
+
+
I
(г, г,) = | г — г, |<
Гй,(*—х)х(х)Л —
Г' 1
Гн((—1)х(%) ах
и, - х
Г
к {( —
т)
х (г) йъ
$
• I
| А(г —х)х (т)б(х
Р
(г, 2,) =
I
2 — 2
0
|<
^ к„(т.)х(( — х)^ —
-и «)лЛ +
+
о
Г (
•г
+
+
X!
^к (х) х (I —
х)
йг
С к(г)х(( — г)йг
В / -
| [*.('-'')-«(<—«ИХ
о
{л(|)х(х-|) й\ ах
| 2 — 2о
I
< шах
[
Дх) —
х
—
^о
(х) | + тах | (х)
1
X
«л;
X тах \х(1)\- Г|
А
(0—
' о
—
А»
(<)
|г — г
в
|<тах|/, (х) —
-Дх)| + тах|/(х)|Х
оо
X С|в.(0-г(01«й +
о
+ тах
I
и (*) [
тах
I
* (О
I
X
оо
X {|Ао (0-Л(0|Я
^И
I
2 — 2„
I
<
I
Л*^
I
+
+ тах|Го(х)| X
оо
М\г-г,\<\М
Яв
-М
ч
\ +
00
о
-8(0|Л + тах|Г. (*) I X
X
00
ХМх (А) —А(0|Л
249.